CN103747981A - 用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法以及用于控制车辆的至少一个大灯的光发射的方法 - Google Patents
用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法以及用于控制车辆的至少一个大灯的光发射的方法 Download PDFInfo
- Publication number
- CN103747981A CN103747981A CN201280040828.9A CN201280040828A CN103747981A CN 103747981 A CN103747981 A CN 103747981A CN 201280040828 A CN201280040828 A CN 201280040828A CN 103747981 A CN103747981 A CN 103747981A
- Authority
- CN
- China
- Prior art keywords
- roadway
- vehicle
- headlight
- light distribution
- irregularity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/085—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to special conditions, e.g. adverse weather, type of road, badly illuminated road signs or potential dangers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/10—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to vehicle inclination, e.g. due to load distribution
- B60Q1/115—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to vehicle inclination, e.g. due to load distribution by electric means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/47—Scattering, i.e. diffuse reflection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/584—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of vehicle lights or traffic lights
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20224—Image subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Quality & Reliability (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Biochemistry (AREA)
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
Abstract
提出了一种用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法(600)。所述方法(600)具有以下步骤:识别(610)所述车辆的所述至少一个大灯在所述行车道区段中产生的当前光分布。该方法(600)也具有以下步骤:基于所述当前光分布和对于所述至少一个大灯典型的光分布来确定(620)所述行车道不平坦部。
Description
技术领域
本发明涉及一种用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法、一种用于控制车辆的至少一个大灯的光发射的方法以及一种构造用于实施这种方法的步骤的设备,以及一种具有用于实施这种方法的程序代码的计算机程序产品。
背景技术
已知的用于照明距离调节的方法响应于车辆的俯仰运动来调整车辆大灯。俯仰运动可能由车辆的装载状态和/或车辆的行驶动态反应造成。在加速过程中也出现的俯仰运动同样可能由不平坦的道路引起。
DE2032588A公开了一种用于自动调整车辆大灯的装置,其具有用于使前大灯围绕水平轴线倾斜的杆。
发明内容
在该背景下,借助本发明提出具有独立权利要求和并列独立权利要求所述的一种用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法、一种用于控制车辆的至少一个大灯的光发射的方法以及一种相应的设备以及一种相应的计算机程序产品。有利的构型从相应的从属权利要求和以下的说明书中得到。
本发明所基于的认识是:能够根据车辆大灯的光分布确定行车道不平坦部。在此,行车道不平坦部尤其可以被前瞻性地探测。基于所识别的行车道不平坦部例如可以匹配车辆大灯的光发射。所述匹配可以如此进行,使得当车辆在行车道不平坦部上运动时,车辆大灯的照明距离不改变或仅不显著地改变。
本发明的优点在于,通过对车辆前方的行车道不平坦部的前瞻性探测可以根据行车道不平坦部及时地匹配相关的车辆系统。此外,至少可以部分地借助在车辆中通常存在的设备——例如车辆摄像机和大灯来确定行车道不平坦部。因此,例如可以在控制车辆的灯光系统时考虑行车道不平坦部,以便避免或显著降低对其他交通参与者的炫目。基于关于即将出现的行车道不平坦部的了解以及例如由此能够实现的、必要时预防性的补偿措施而能够提高交通安全性。例如,尽管车辆在行车道不平坦部上运动,仍能够实现道路的始终可靠的安全的照亮。
本发明提出一种用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法,其中,该方法具有如下步骤:
识别车辆的至少一个大灯在行车道区段中产生的当前光分布;以及
基于当前光分布和对于至少一个大灯典型的光分布来确定行车道不平坦部。
车辆可以是机动车,尤其是受道路约束的机动车,例如轿车或卡车。在执行该方法的步骤期间车辆可以处于运动中。至少一个大灯例如可以是车辆的前大灯。至少一个大灯照明行车道的与车辆相邻的区段,例如朝行驶方向在车辆前方的区段。在此,至少一个大灯在行车道上产生光分布。光分布涉及大灯灯光在行车道上的分布,尤其是光量的分布、行车道的反射程度的分布等等。光分布例如可以借助在车辆的向前行驶方向上定向的摄像机或图像处理装置来拍摄并且随后借助合适的识别方法来识别。因此,光分布可以以图像数据或经分析处理的图像信息形式存在。典型的光分布可以是有特点的、预给定的、标准化的或者经校准的光分布。典型的光分布可以用作用于确定行车道不平坦部的参考光分布。典型的光分布可以被预先确定并且在执行该方法时可以从存储器中读取。典型的光分布例如可以在如下状况中被确定:其中,车辆位于具有平坦的表面的道路上。在被至少一个大灯照明的行车道区段中存在行车道不平坦部的情况下,典型的光分布可能与当前光分布偏离。当前光分布可以是典型的光分布的由行车道不平坦部改变的变型。行车道不平坦部例如可能由颠簸、路面凹坑、车辙等引起。在行车道不平坦部的区域中,当前光分布可能与典型的光分布偏离。
根据一种实施方式,在确定的步骤中,可以实施以下步骤:将所识别的当前光分布和典型的光分布组合以便产生组合的光分布。在此,行车道不平坦部可以基于组合的光分布来确定。在组合的步骤中,可以在求差、叠加等的情况下组合这些光分布。在组合的步骤中,可以应用算术和/或图像处理的方法。组合的光分布例如可以表示当前光分布与典型的光分布的可能的偏差。这种组合提供了如下优点:从组合的光分布可以明显和可靠地确定行车道不平坦部的存在。
也可以设置以下步骤:检验组合的光分布是否满足行车道不平坦部条件。在此,在确定的步骤中当组合的光分布满足行车道不平坦部条件时可以确定行车道不平坦部。行车道不平坦部条件可以构造用于使得能够辨识尽可能大数目的行车道不平坦部变型。这种检验提供如下优点:根据行车道不平坦部条件可以可靠地、高效地并且在低耗费下辨识多种可能的行车道不平坦部。
在此,行车道不平坦部条件可以具有至少一个光分布模式,所述至少一个光分布模式表示行车道不平坦部的存在和/或特性。在此,光分布模式可以相应于如在存在行车道不平坦部的情况下可识别的那样的光分布的模式。光分布模式例如可以具有所谓的明暗模式、光量分布的模式等等。因此,在检验步骤中可以根据以至少一个光分布模式形式的行车道不平坦部条件实施模式比较、模式识别等。当在组合的光分布中辨识出至少一个光分布模式时,这意味着,存在行车道不平坦部。此外,光分布模式可以能够推断出行车道不平坦部的形状、大小、倾斜角度和/或其他特性。例如,可以根据这种行车道不平坦部识别行车道不平坦部是行车道中的突出处还是下陷处。这种行车道不平坦部条件提供如下优点:可以提高行车道不平坦部的确定的精度。
此外,本发明提出一种用于控制车辆的至少一个大灯的光发射的方法,其中,该方法具有如下步骤:
按照根据以上权利要求中任一项所述的方法确定行车道不平坦部;以及
基于行车道不平坦部求取用于控制车辆的至少一个大灯的光发射的控制信息。
至少一个大灯的光发射在此可以分级地或无级地变化。大灯的光发射在此可以在大灯的辐射特征方面来改变。辐射特征可以表示亮度、发光角度和/或等等。控制信息可以引起:至少一个大灯的光发射或者辐射特征被如此改变,使得至少一个大灯的照明距离可以被保持。控制信息可以通过接口输出给至少一个大灯和/或用于操控至少一个大灯的控制器。
根据一种实施方式,可以在车辆到达确定的行车道不平坦部之前执行求取的步骤。这种实施方式提供如下优点:基于前瞻性求取的控制信息可以进行光发射的预防性匹配。因此,光发射的控制可以与到达行车道不平坦部相协调并且及时进行。因此,可以进一步减小其他交通参与者的炫目并且可以改善在行驶经过行车道不平坦部时道路走向的可看清性。
也可以设置以下步骤:基于所确定的行车道不平坦部产生用于至少一个大灯的俯仰运动值。在此,在求取的步骤中,控制信息可以构造用于在使用所产生的俯仰运动值的情况下控制至少一个大灯的光发射。当车辆在行车道不平坦部上运动时,会造成车辆的俯仰运动并且因此造成至少一个大灯的俯仰运动。在产生俯仰运动值的步骤中,可以估计并且因此量化俯仰运动的方向和量值或者俯仰角度的量值。控制信息因此可以构造用于在使用来操控至少一个大灯的情况下引起:能够补偿或平衡或者修正至少一个大灯的这种俯仰运动。
此外,在求取的步骤中,可以附加地基于环境数据和/或车辆的行驶数据求取控制信息。环境数据例如可以具有道路的地形或者拓扑结构,其例如可以由导航设备等来接收。因此,环境数据例如可以指示转弯、上坡路或者下坡路等等。行驶数据可以具有行驶动态性信息例如速度信息、加速度信息、路况信息(Straβenlageinformation)等、车辆方面的位置信息和/或装载信息。在控制光发射时要考虑的车辆俯仰运动也取决于行驶动态性信息。对环境数据和/或行驶数据的这种考虑提供如下优点:可以进一步提高行车道不平坦部的确定的精度。环境数据和/或行驶数据的使用能够附加地实现对所确定的行车道不平坦部的可信度检查,并且因此提高对行车道不平坦部的正确识别的可靠性。
此外,本发明提出一种构造用于实施或者实现以上方法之一的步骤的设备。尤其,该设备可以具有如下装置,其构造用于执行以上方法之一的每个步骤。通过本发明的以设备形式的这些实施变型也可以快速且高效地解决本发明所基于的任务。
设备在此可以理解为处理传感器信号并且据此输出控制信号的电设备或控制器。所述设备可以具有按硬件方式和/或按软件方式构造的接口。在按硬件方式的构造中,接口例如可以是包括所述设备的最不同功能的所谓的系统ASIC的一部分。然而,还可能的是,接口是单独的集成电路或至少部分地由分立部件组成。在按软件方式的构造中,接口可以是软件模块,其例如与其他软件模块共存在微控制器上。
具有程序代码的计算机程序产品也是有利的,所述程序代码可以存储在机器可读的载体,如半导体存储器、硬盘存储器或光学存储器上并且用于当在与计算机相应的设备上执行程序时根据先前描述的实施方式之一来实施所述方法。
附图说明
根据附图示例性地详细阐述本发明。示出:
图1A至4B:车辆的不同光锥的示图;
图5:具有根据本发明的一个实施例的控制设备的车辆的示意图;
图6:根据本发明的一个实施例的方法的流程图;
图7:根据本发明的一个实施例的方法的流程图;
图8A和8B:车辆的不同光分布的示图;以及
图9:具有三维效果的二维图像的示图。
具体实施方式
在本发明的优选实施例的后续描述中,对于在不同附图中示出并且起类似作用的元件使用相同的或类似的参考标记,其中不重复描述这些元件。
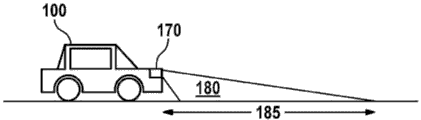
图1A示出在均匀装载或者未装载的状态中的车辆的光锥的示图。示出车辆100、大灯170、光锥180和照明距离185。大灯170是车辆100的典型两个前大灯中的一个。车辆100的大灯170产生光锥180。光锥180具有大约65m的照明距离。
图1B示出在装载的或非均匀装载的状态中的车辆的光锥的示图。图1B中的示图相应于图1A中的示图,以下除外:车辆100的后轴线比车辆100的前轴线装载更重。因此,车辆100相对于行车道具有倾斜角度或者俯仰角度。因此,光锥180相对于行车道比图1A的示图中升高得更多并且因此具有更大的照明距离。
图1C示出在不均匀装载的状态中在应用统计的照明距离调节的情况下车辆的光锥的示图。图1C中的示图相应于图1B中的示图,以下除外:附加地示出匹配的光锥190和匹配的照明距离195。匹配的光锥190具有匹配的照明距离195。在应用静态照明距离调节的情况下得到具有匹配的照明距离195的匹配的光锥190。经典的静态照明距离调节(LWR)将车辆100的大灯170的光发射自动地与车辆100的装载状态匹配。在此,如此改变大灯170的光发射,使得光锥180下降,从而产生匹配的光锥190。在此,匹配的照明距离195能够相应于图1A中的照明距离,即为大约65m。通过静态照明距离调节,在大灯170的光发射方面发生载荷平衡。
图2A示出车辆的光锥的示图。图2A中的示图相应于图1A中的示图。图2A在此示出在平坦行车道上的或者在未装载的状态中的车辆100。
图2B示出在行车道不平坦部上的车辆的光锥的示图。行车道在此具有不平坦部。图2B中的示图相应于图2A的示图,以下除外:车辆100由于不平坦的行车道而相对于该行车道有倾斜角度或者俯仰角度。在此,车辆100的前轴线比车辆100的后轴线处于相对于平均行车道水平更高的水平上。因此,光锥180相对于行车道比在图2A中的示图升高得更多。
图2C示出在应用动态照明距离调节的情况下在行车道不平坦部上车辆的光锥的示图。图2C中的示图相应于图2B中的示图,以下除外:附加地示出匹配的光锥190和匹配的照明距离195。匹配的光锥190具有匹配的照明距离195。在应用动态照明距离调节的情况下得到具有匹配的照明距离195的匹配的光锥190。在此,如此改变大灯170的光发射,使得光锥180下降,从而得到匹配的光锥190。在此,匹配的照明距离195相应于图2A中的照明距离,即为大约65m。在动态照明距离调节的情况下,大灯170动态地与道路事件和行驶动态性匹配。因此,光锥180在加速过程中下降,其中,得到匹配的光锥190,以便不使其他交通参与者炫目。相反,在制动时大灯170提升,以便平衡由俯仰运动引起的有效距离减小。在加速过程中也出现的俯仰运动同样可能由不平坦的道路或行车道引起。
图3A示出车辆的光锥的示图。图3A中的示图相应于图1A或者2A中的示图。图3A在此示出平坦道路上或者在未装载的状态中的车辆100。
图3B示出在道路走向中的上坡路前车辆的光锥的示图。道路走向中的上坡路引起车辆100前方的行车道上升。在此,光锥180射到上升的行车道上。因此,照明距离185相对于图3A的照明距离缩短,即小于65m。在此,大灯170的光发射与道路地形不匹配。
图3C示出在道路走向中的上坡路前车辆的借助通过动态照明距离调节对道路地形的平衡的光锥的示图。图3C中的示图相应于图2B中的示图,以下除外:附加地示出匹配的光锥190和匹配的照明距离195。匹配的光锥190具有匹配的照明距离195。在应用动态照明距离调节以平衡道路地形的情况下得到具有匹配的照明距离195的匹配的光锥190。在此,如此改变大灯170的光发射,使得光锥180升高,从而得到匹配的光锥190。在此,匹配的照明距离195能够相应于图2A中的照明距离,即为大约65m。因此,大灯170的光发射与行车道地形匹配。
图4A示出在平坦行车道上的车辆的光锥的示图。图3A中的示图相应于图1A、图2A或图3A中的示图,以下除外:附加地示出另外的车辆或其他车辆(Fremdfahrzeug)400。车辆400是向车辆100迎面驶来的车辆。其他车辆400因此具有与车辆100的行驶方向相反的行驶方向。车辆100的光锥180检测其他车辆400的近行车道的区段。
图4B示出在存在行车道不平坦部时车辆的光锥的示图。图4B中的示图相应于图4A中的示图,以下除外:车辆100的前轴线位于行车道不平坦部的区域中,其中,车辆100的前轴线相对于车辆100的后轴线升高。行车道不平坦部在此是行车道中的颠簸或突起。因此,光锥180相对于行车道比在图4A中的示图升高得更多。车辆100的光锥180在此检测其他车辆400,例如在整个高度上。因此出现其他车辆400的驾驶员受大灯的闪光炫目,闪光由颠簸或行车道不平坦部造成。
根据图1A至图4B的用于照明距离调节的上述方案不是前瞻性的,由此,当车辆100行驶在行车道不平坦部或颠簸上时从其他车辆400即迎面驶来的交通来看总是又出现车辆100的大灯170的闪光并且因此出现炫目。车辆100的俯仰角度的这种小的快速变化可以由静态照明距离调节和/或动态照明距离调节在车辆100的位置变化被检测的情况下才来调节。
图5示出具有根据本发明的一个实施例的控制设备的车辆500的示意图。该车辆500具有车辆摄像机510、控制设备520、操控设备 560和两个大灯570,所述控制设备具有识别装置530、确定装置540以及求取装置550。车辆摄像机510与控制设备520以及操控设备560与控制设备520例如分别通过至少一个信号线路连接。因此,控制设备520连接在车辆摄像机510与操控设备560之间。大灯570与操控设备560例如经由至少一个信号线路连接。因此,操控设备560连接在控制设备520与大灯570之间。即使在图5中未示出,但操控设备560也可以是控制设备520的一部分或控制设备520也可以是操控设备560的一部分。
560和两个大灯570,所述控制设备具有识别装置530、确定装置540以及求取装置550。车辆摄像机510与控制设备520以及操控设备560与控制设备520例如分别通过至少一个信号线路连接。因此,控制设备520连接在车辆摄像机510与操控设备560之间。大灯570与操控设备560例如经由至少一个信号线路连接。因此,操控设备560连接在控制设备520与大灯570之间。即使在图5中未示出,但操控设备560也可以是控制设备520的一部分或控制设备520也可以是操控设备560的一部分。
车辆摄像机510可以具有图像处理电子装置。车辆摄像机510构造用于拍摄通过大灯570产生的在由大灯570所照亮的行车道区段上的光分布的至少一个图像并且以图像信息、图像数据或者图像信号形式输出给控制设备120。
控制设备520具有识别装置530、确定装置540以及求取装置550。控制设备520构造用于确定由车辆500的至少一个大灯570照亮的行车道区段的行车道不平坦部以及控制车辆500的大灯570的光发射。控制设备520的识别装置530、确定装置540和求取装置550彼此连接。
识别装置530构造用于从车辆摄像机510接收图像信息、图像数据或者图像信号。识别装置530构造用于基于由车辆摄像机510接收的数据识别车辆500的大灯570在行车道区段中产生的当前光分布。识别装置530尤其可以从车辆摄像机510的图像信息、图像数据或者图像信号识别当前光分布。为此,识别装置530可以使用合适的方法用于图像处理、图像分析、模式识别、对象识别和/或等等。识别装置530可以向确定装置540输出当前光分布。
确定装置540构造用于从识别装置530接收当前光分布。确定装置540构造用于基于当前光分布和对于大灯570典型的光分布确定行车道不平坦部。在此,对于大灯570典型的光分布可以是用于当前对大灯570的光发射进行调整的预给定的光分布。典型的光分布可以从存储装置——例如查找表读取,在所述存储装置中也可以存储用于当前对光发射进行不同调整的多个典型光分布。在此,存储装置可以是控制设备520的装置之一的一部分或布置在控制设备25之外。确定装置540可以实施光分布的合适组合用于确定行车道不平坦部。确定装置540构造用于向求取装置550输出关于行车道不平坦部的信息。
求取装置550构造用于从确定装置540接收关于行车道不平坦部的信息。求取装置550构造用于在考虑行车道不平坦部的情况下求取控制信息以控制车辆500的大灯570的光发射。
控制设备520构造用于向操控设备560例如以控制信息信号形式输出控制信息。
操控设备560构造用于从控制设备520接收控制信息。操控设备560也构造用于产生控制信号以操控大灯570。操控设备在产生控制信号的情况下可以考虑或者使用控制信息以控制大灯570的光发射。控制信号因此可以包含控制信息。操控设备560构造用于向大灯570输出控制信号。
大灯570可以从操控设备560接收控制信号。控制信号中的控制信息可以引起光发射与行车道不平坦部匹配。尤其,在此可以补偿行车道不平坦部对车辆500的俯仰角度或者对大灯570的影响。
图6示出根据本发明的一个实施例的用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法600的一个流程图。车辆可以是图5中的车辆。该方法600具有识别610车辆的至少一个大灯在行车道区段中产生的当前光分布的步骤。该方法600也具有基于当前光分布和对于至少一个大灯典型的光分布确定620行车道不平坦部的步骤。该方法600可以结合设备——例如图5中的控制设备来有利地执行。
图7示出根据本发明的一个实施例的用于控制车辆的至少一个大灯的光发射的方法700的一个流程图。车辆可以是图5中的车辆。该方法700具有确定710行车道不平坦部的步骤。在此,确定710的步骤具有图6中的方法的步骤。该方法700也具有基于行车道不平坦部求取720用于控制车辆的至少一个大灯的光发射的控制信息的步骤。该方法700可以结合设备——例如图5中的控制设备来有利地执行。
因此,图5中的控制设备可以构造用于实施图6中的方法600的步骤和/或图7中的方法700的步骤。
图8A示出平坦行车道上或处于均匀装载的状态中的车辆的光分布的示图。示出车辆500、大灯570和光分布880。光分布880可以是对于大灯570典型的光分布。图8A中的示图类似图1A、2A、3A或者4A中的示图,以下除外:在图8A中,通过大灯570产生的光锥——其未明确地设有参考标记——通过线划分成多个扇形以及示出与光锥对应的光分布880。光分布880是沿大灯570的光锥中的一个照明距离的所反射的光量的分布。在照明距离的或者光锥的近车辆的端部处,光分布880比照明距离或者光锥的远离车辆的端部处显现更大的光量。光分布880具有从照明距离或者光锥的近车辆的端部朝照明距离或者光锥的远离车辆的端部连续降低的光量。根据该实施例,由行车道反射对于大灯570典型的光分布。
如果由大灯570照亮的区域例如被图5中所示的摄像机510检测,则在由摄像机产生的图像上成像典型的光分布。图8A中所示的扇形可以分别对应图像的一个图像区域,图像区域又根据典型的光分布对应确定的光强度值。关于相应于典型光分布的图像区域与对应的光强度值的布置的信息可以作为参考被存储。如果将在图8A中所示的当前光分布的由摄像机检测的成像与关于典型光分布的信息比较,则求取到当前光分布与典型光分布之间没有偏差或处于公差范围内的偏差。这表明,行车道的由大灯570照明的区域是平坦的。
图8B示出在存在行车道不平坦部的情况下车辆的光分布的示图。示出车辆500、大灯570、光分布882、偏差区段884、亮区域886和暗区域888。此外,图8B中的示图类似于图8A中的示图,以下除外:在图8B中行车道中例如以颠簸形式存在行车道不平坦部。由大灯570产生的光锥照明行车道不平坦部。由此得到光分布882,其由于行车道不平坦部而相对于图8A中的光分布变化。光分布882是由大灯570产生的当前光分布。光分布882在偏差区段884中与图8A中的光分布偏离。偏差区段884对应行车道不平坦部。因此由行车道不平坦部的区域反射与对于大灯570典型的光分布偏离的光量。在图8B中颠簸示例性地显示为行车道不平坦部。亮区域886相应于颠簸的朝向车辆500的边缘。由于行车道在颠簸的朝向车辆500的边缘的区域中倾斜,所以在亮区域886中,在光分布882中所反射的光量相对于光部分882中的邻接的区域提高。暗区域888相应于颠簸的背离车辆500的边缘。由于行车道在颠簸的背离车辆500的边缘的区域中倾斜,所以在暗区域中,在光分布882中反射的光量相对于光分布882中的邻接的区域减小。
如果将在图8B中所示的当前光分布的由摄像机检测的成像与关于典型光分布的信息比较,则求取到在当前光分布与典型光分布之间没有偏差或处于公差范围之外的偏差。这表明,由大灯570照明的行车道区域是不平坦的。
下面参考图5至8B根据本发明的一个实施例阐述通过“Structure fromShading:由明暗恢复结构”探测颠簸。该探测在此能够通过具有控制设备520并且可选地具有车辆摄像机510的系统和大灯570的系统实现,其中,该系统例如借助车辆摄像机510探测颠簸并且前瞻性地匹配光分布——例如降低光分布,以便避免由于大灯570的闪烁引起迎面驶来的车辆400的炫目。该系统知晓大灯570的光分布——例如近光灯的光分布,也即知道多少光朝哪个方向发射。在假设反射率或颜色处处相等的情况下,可以计算,多少光必须从哪个点到达车辆摄像机510中。如果光量与所预期的光量偏离,则可能为颠簸,于是该系统可以通过匹配大灯570的光发射来对该颠簸作出反应。通过分析处理颠簸的不同区域也可以区分颠簸突出处(Kuppen)与颠簸下陷处。例如如果亮区域886和暗区域888的顺序如图8B中所示的那样,则存在颠簸突出处。与此相应地,大灯570的光发射可以在颠簸之前根据当前调整来提升或下降。
该系统可以扩展对道路地形的识别,以便一同考虑道路的斜坡。这种信息例如也可以来自导航设备。该系统并不限于匹配例如近光灯的光锥的高度,而是控制信息——例如颠簸信息也可以转发给其他灯光功能。由此,基于竖直的对象位置工作的算法例如AHC(Adaptive High Beam Control:自适应远光控制;滑动照明距离)、OIC(Object Illumination Control:对象照明控制;标记光)和CHC(Continuous High Beam Control(连续远光控制);防炫目远光)能够匹配参数。AHC和CHC可以放弃提高照明距离或者作用距离直至颠簸之后,必要时改变消抖动策略或者等待时间或消抖动路程。OIC可以直接在颠簸之前已经采用正确的匹配的位置。原始参数可以在经过颠簸之后重新来调整。颠簸探测主要可以用在ALC(自适应近光控制)中以匹配近光灯或者整个大灯模块。同样可考虑结合OIC的使用,其中,对象要被目标明确地照明。此外,颠簸探测可以结合AHC和CHC来使用,以便匹配照亮策略,例如提高辐射角度和/或作用距离直至等到颠簸之后。
图9示出具有三维效果的二维图像的示图。图9中的示图用于阐述其,如来自二维图像的阴影可被解释为体积形状。通过阴影例如在观察者的头脑中形成空间效果。该原理也称作“由明暗恢复结构”,其中,根据对象的明暗推断其体积的外形。因此,图9中的示图基于图6中的方法或者图5中的控制设备阐明了关于图8A和图8B的工作原理。
本发明的实施例因此能够利用颠簸探测实现前瞻性的动态照明距离调节并且可选地附加地实现AHC、CHC、OIC等的参数化。在此重要的是,利用“由明暗恢复结构”以探测颠簸以便前瞻性地相应地匹配大灯。换言之,进行明暗模式的分析处理用于凸块(Bump)识别或者颠簸识别,并且必要时进行照明距离的预防性匹配。
所描述的和在附图中示出的实施例仅仅是示例性地选择的。不同的实施例可以完整地或关于各个特征彼此组合。一个实施例也可以通过另一个实施例的特征来补充。此外,可以重复以及以不同于所描述的顺序的顺序执行根据本发明的方法步骤。
Claims (10)
1.一种用于确定由车辆(500)的至少一个大灯(570)照亮的行车道区段的行车道不平坦部的方法(600),其中,所述方法(600)具有如下步骤:
识别(610)所述车辆(500)的所述至少一个大灯(570)的在所述行车道区段中产生的当前光分布(882);以及
基于所述当前光分布(882)和对于所述至少一个大灯(570)典型的光分布(880)来确定(620)所述行车道不平坦部。
2.根据权利要求1所述的方法(600),其中,在所述确定(600)的步骤中,实施以下步骤:将所识别的当前光分布(882)和所述典型的光分布(880)组合以便产生组合的光分布,并且基于所述组合的光分布确定所述行车道不平坦部。
3.根据权利要求2所述的方法(600),其具有以下步骤:检验所述组合的光分布是否满足行车道不平坦部条件,其中,在所述确定(620)的步骤中,当所述组合的光分布满足所述行车道不平坦部条件时,确定所述行车道不平坦部。
4.根据权利要求3所述的方法(600),其中,所述行车道不平坦部条件具有至少一个光分布模式,所述至少一个光分布模式表示行车道不平坦部的存在和/或特性。
5.一种用于控制车辆(500)的至少一个大灯(570)的光发射的方法(700),其中,所述方法(700)具有如下步骤:
按照根据以上权利要求中任一项所述的方法(600)确定(710)行车道不平坦部;以及
基于所述行车道不平坦部求取(720)用于控制所述车辆(500)的所述至少一个大灯(570)的光发射的控制信息。
6.根据权利要求5所述的方法(700),其中,在所述车辆(500)到达所确定的行车道不平坦部之前执行所述求取(720)的步骤。
7.根据以上权利要求中任一项所述的方法(700),其具有以下步骤:基于所确定的行车道不平坦部产生用于所述至少一个大灯(570)的俯仰运动值,其中,在所述求取(720)的步骤中控制信息构造用于在使用所产生的俯仰运动值的情况下控制所述至少一个大灯(570)的光发射。
8.根据以上权利要求中任一项所述的方法(700),其中,在所述求取(320)的步骤中附加地基于环境数据和/或所述车辆(500)的行驶数据求取所述控制信息。
9.一种构造用于实施根据权利要求1至8中任一项所述的方法(600;700)的步骤的设备(520)。
10.一种计算机程序产品,其具有程序代码,用于在设备(520)上执行程序时实施根据权利要求1至8中任一项所述的方法(600;700)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011081354.3 | 2011-08-23 | ||
| DE102011081354.3A DE102011081354B4 (de) | 2011-08-23 | 2011-08-23 | Verfahren zur Bestimmung einer Fahrbahnunebenheit eines von zumindest einem Scheinwerfer eines Fahrzeugs ausgeleuchteten Fahrbahnabschnitts und Verfahren zur Steuerung einer Lichtaussendung zumindest eines Scheinwerfers eines Fahrzeugs |
| PCT/EP2012/062902 WO2013026607A1 (de) | 2011-08-23 | 2012-07-03 | Verfahren zur bestimmung einer fahrbahnunebenheit eines von zumindest einem scheinwerfer eines fahrzeugs ausgeleuchteten fahrbahnabschnitts und verfahren zur steuerung einer lichtaussendung zumindest eines scheinwerfers eines fahrzeugs |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103747981A true CN103747981A (zh) | 2014-04-23 |
Family
ID=46420220
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201280040828.9A Pending CN103747981A (zh) | 2011-08-23 | 2012-07-03 | 用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法以及用于控制车辆的至少一个大灯的光发射的方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20150073654A1 (zh) |
| EP (1) | EP2748034A1 (zh) |
| CN (1) | CN103747981A (zh) |
| DE (1) | DE102011081354B4 (zh) |
| WO (1) | WO2013026607A1 (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105711481A (zh) * | 2014-12-22 | 2016-06-29 | 通用汽车环球科技运作有限责任公司 | 大灯系统、交通运输工具和运行大灯系统的方法 |
| WO2019008046A3 (de) * | 2017-07-05 | 2019-06-27 | Audi Ag | Beleuchten einer fahrzeugumgebung eines kraftfahrzeugs |
| CN111189035A (zh) * | 2018-11-15 | 2020-05-22 | 罗伯特·博世有限公司 | 用于调节车辆的至少一个前照灯的照明范围的方法和控制单元 |
| CN116194332A (zh) * | 2020-10-15 | 2023-05-30 | 法雷奥照明公司 | 用于执行机动车照明设备的动态自调平的方法和机动车照明布置 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013201850A1 (de) * | 2013-02-05 | 2014-08-07 | Hella Kgaa Hueck & Co. | Vorrichtung und Verfahren zur Leuchtweitenregulierung |
| DE102013216903B4 (de) * | 2013-08-26 | 2025-08-14 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bestimmen einer Straßenqualität |
| DE102014219120A1 (de) | 2013-12-19 | 2015-06-25 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bestimmen einer Leuchtweitenausrichtung eines Scheinwerfers |
| DE102015206936A1 (de) | 2015-04-16 | 2016-10-20 | Automotive Lighting Reutlingen Gmbh | Verfahren und Vorrichtung zum Detektieren von Hindernissen im Fahrweg eines Kraftfahrzeugs |
| KR101832967B1 (ko) * | 2016-05-16 | 2018-02-28 | 엘지전자 주식회사 | 차량에 구비된 제어장치 및 이의 제어방법 |
| JP6800039B2 (ja) * | 2017-02-20 | 2020-12-16 | スタンレー電気株式会社 | 車両用灯具及び車両用灯具の制御方法 |
| DE102017005019B4 (de) | 2017-05-26 | 2024-09-19 | Mercedes-Benz Group AG | Beleuchtungsvorrichtung und Verfahren zu deren Betrieb |
| KR102368927B1 (ko) * | 2017-08-08 | 2022-03-03 | 주식회사 만도모빌리티솔루션즈 | 과속방지턱에 의한 빛 공해를 차단할 수 있는 전조등제어장치 및 전조등제어방법 |
| DE102017119376A1 (de) | 2017-08-24 | 2019-02-28 | HELLA GmbH & Co. KGaA | Verfahren zur Ansteuerung mindestens einer Fahrzeugkomponente eines Fahrzeugs, Fahrzeugsystem, Computerprogrammprodukt und computerlesbares Medium |
| DE102019217988A1 (de) * | 2019-11-21 | 2021-05-27 | Zf Friedrichshafen Ag | Kamerabasierte Detektion von Kippbewegungen |
| KR102812373B1 (ko) * | 2019-12-03 | 2025-05-23 | 현대모비스 주식회사 | 헤드 램프 레벨링 시스템 |
| DE102023115247A1 (de) * | 2023-06-12 | 2024-12-12 | HELLA GmbH & Co. KGaA | Vorrichtung und Verfahren zur Ermittlung einer Fahrbahnbeschaffenheit |
| DE102023002505A1 (de) | 2023-06-20 | 2024-03-14 | Mercedes-Benz Group AG | Verfahren zum Betreiben eines Fahrzeugs und Fahrzeug |
| US20250042430A1 (en) * | 2023-07-31 | 2025-02-06 | Nissan North America, Inc. | Road Irregularity Detection |
| DE102024002115B4 (de) * | 2024-06-27 | 2026-02-26 | Mercedes-Benz Group AG | Verfahren zur Erfassung von Bodenunebenheiten auf einer Straße sowie Erfassungssystem |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5193894A (en) * | 1991-07-08 | 1993-03-16 | Robert Bosch Gmbh | Apparatus and method for controlling the light-range of motor vehicle headlights |
| DE19916175A1 (de) * | 1999-04-10 | 2000-10-12 | Bosch Gmbh Robert | Einrichtung zur Einstellung der Richtung des von wenigstens einm Scheinwerfer eines Fahrzeugs ausgesandten Lichtbündels |
| US6144158A (en) * | 1996-11-07 | 2000-11-07 | Sensci Corporation | Adaptive/anti-blinding headlights |
| FR2927857A1 (fr) * | 2008-02-27 | 2009-08-28 | Valeo Vision Sa | Procede d'ajustement d'un faisceau lumineux pour vehicule |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1314034A (en) * | 1969-07-01 | 1973-04-18 | Ward Dev Martin | Self levelling lamps for vehicles |
| DE19730414A1 (de) * | 1997-07-16 | 1999-01-21 | Opel Adam Ag | Verfahren und Vorrichtung zur vorausschauenden Fahrbahnbeurteilung |
| DE19902015A1 (de) * | 1999-01-20 | 2000-07-27 | Porsche Ag | Anordnung zur Anpassung des Beleuchtungssystems an einem Kraftfahrzeug |
| DE102004006133B4 (de) * | 2004-02-07 | 2006-11-23 | Bayerische Motoren Werke Ag | Vorrichtung zur Leuchtweitenregulierung eines Kraftfahrzeugs |
| DE102008031159A1 (de) * | 2008-07-03 | 2010-01-07 | Adc Automotive Distance Control Systems Gmbh | Verfahren zur Dejustageerkennung eines Fahrzeugscheinwerfers mit einer Kamera |
| KR20100018366A (ko) * | 2008-08-06 | 2010-02-17 | 현대자동차주식회사 | 전조등 및 안개등 자동조절장치 |
| TW201043507A (en) * | 2009-06-05 | 2010-12-16 | Automotive Res & Testing Ct | Method for detection of tilting of automobile and headlamp automatic horizontal system using such a method |
| JP5577138B2 (ja) * | 2010-04-08 | 2014-08-20 | スタンレー電気株式会社 | 車両用前照灯 |
-
2011
- 2011-08-23 DE DE102011081354.3A patent/DE102011081354B4/de active Active
-
2012
- 2012-07-03 EP EP12730992.0A patent/EP2748034A1/de not_active Withdrawn
- 2012-07-03 WO PCT/EP2012/062902 patent/WO2013026607A1/de not_active Ceased
- 2012-07-03 US US14/240,688 patent/US20150073654A1/en not_active Abandoned
- 2012-07-03 CN CN201280040828.9A patent/CN103747981A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5193894A (en) * | 1991-07-08 | 1993-03-16 | Robert Bosch Gmbh | Apparatus and method for controlling the light-range of motor vehicle headlights |
| US6144158A (en) * | 1996-11-07 | 2000-11-07 | Sensci Corporation | Adaptive/anti-blinding headlights |
| DE19916175A1 (de) * | 1999-04-10 | 2000-10-12 | Bosch Gmbh Robert | Einrichtung zur Einstellung der Richtung des von wenigstens einm Scheinwerfer eines Fahrzeugs ausgesandten Lichtbündels |
| FR2927857A1 (fr) * | 2008-02-27 | 2009-08-28 | Valeo Vision Sa | Procede d'ajustement d'un faisceau lumineux pour vehicule |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105711481A (zh) * | 2014-12-22 | 2016-06-29 | 通用汽车环球科技运作有限责任公司 | 大灯系统、交通运输工具和运行大灯系统的方法 |
| WO2019008046A3 (de) * | 2017-07-05 | 2019-06-27 | Audi Ag | Beleuchten einer fahrzeugumgebung eines kraftfahrzeugs |
| CN111189035A (zh) * | 2018-11-15 | 2020-05-22 | 罗伯特·博世有限公司 | 用于调节车辆的至少一个前照灯的照明范围的方法和控制单元 |
| CN116194332A (zh) * | 2020-10-15 | 2023-05-30 | 法雷奥照明公司 | 用于执行机动车照明设备的动态自调平的方法和机动车照明布置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20150073654A1 (en) | 2015-03-12 |
| DE102011081354A1 (de) | 2013-02-28 |
| WO2013026607A1 (de) | 2013-02-28 |
| EP2748034A1 (de) | 2014-07-02 |
| DE102011081354B4 (de) | 2025-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103747981A (zh) | 用于确定由车辆的至少一个大灯照亮的行车道区段的行车道不平坦部的方法以及用于控制车辆的至少一个大灯的光发射的方法 | |
| US9637047B2 (en) | Method and control unit for adapting an upper headlight beam boundary of a light cone | |
| CN104220301B (zh) | 用于匹配大灯光锥的大灯辐射上限的方法和控制设备 | |
| JP5479652B2 (ja) | 車両投光器の光円錐の照射範囲テスト値の妥当性検査を行うための方法および制御装置 | |
| CN102951070B (zh) | 用于确定至少一个大灯的照明距离的方法和用于校准车辆的至少一个大灯的光发射的方法 | |
| US9114754B2 (en) | Method for regulating the beam range of at least one headlamp of a vehicle and light control device | |
| US20140301094A1 (en) | Method, control unit, and computer program product for setting a range of a headlight of a vehicle | |
| CN103596805B (zh) | 用于为灯光控制单元提供信号的方法和设备 | |
| US20160288698A1 (en) | method and device for ascertaining a safety angle of a headlight beam of at least one headlight of a vehicle | |
| CN103158607A (zh) | 用于控制车辆的大灯的光发射的方法和装置 | |
| JP2012228978A (ja) | 車両用前照灯装置 | |
| CN104822565A (zh) | 用于使照灯光锥的照灯射束界限被适配的方法及评定和控制单元 | |
| JP2004189220A (ja) | 車両のヘッドランプの向きを制御する装置及びその方法 | |
| JP5026930B2 (ja) | 車両光源の方向を動的に修正するシステム及び修正方法 | |
| KR20190045715A (ko) | 차선이탈 경보시스템을 이용한 헤드램프 레벨 보상 방법 | |
| KR20100018366A (ko) | 전조등 및 안개등 자동조절장치 | |
| CN110371014A (zh) | 车辆的防炫目控制方法、系统及车辆 | |
| JP2817600B2 (ja) | 車両用前照灯装置 | |
| JP6916038B2 (ja) | 車両用灯具の制御装置および車両用灯具システム | |
| CN104880300A (zh) | 用于分析车辆的大灯的灯光发射的方法和设备 | |
| WO2020031255A1 (ja) | 前照灯用光軸制御装置 | |
| WO2012127294A1 (en) | Bicycle detection system and irradiation control system | |
| JP2014101068A (ja) | 誤検知判定装置および車両制御システム | |
| CN110962734A (zh) | 车辆的防炫目控制方法、系统及车辆 | |
| KR101675533B1 (ko) | 차량용 램프의 레벨링 제어 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20140423 |