CN111439132A - 永磁电机的控制方法、装置、动力系统及电动汽车 - Google Patents
永磁电机的控制方法、装置、动力系统及电动汽车 Download PDFInfo
- Publication number
- CN111439132A CN111439132A CN202010540328.8A CN202010540328A CN111439132A CN 111439132 A CN111439132 A CN 111439132A CN 202010540328 A CN202010540328 A CN 202010540328A CN 111439132 A CN111439132 A CN 111439132A
- Authority
- CN
- China
- Prior art keywords
- permanent magnet
- frequency
- magnet motor
- stator
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 47
- 238000010438 heat treatment Methods 0.000 claims abstract description 54
- 238000004804 winding Methods 0.000 description 24
- 238000010586 diagram Methods 0.000 description 7
- 238000009826 distribution Methods 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000003993 interaction Effects 0.000 description 4
- 230000009286 beneficial effect Effects 0.000 description 3
- 238000004146 energy storage Methods 0.000 description 3
- 230000007613 environmental effect Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000000306 component Substances 0.000 description 2
- 238000011217 control strategy Methods 0.000 description 2
- 229910000976 Electrical steel Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000008358 core component Substances 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000009827 uniform distribution Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/007—Physical arrangements or structures of drive train converters specially adapted for the propulsion motors of electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/51—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells characterised by AC-motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/20—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by converters located in the vehicle
- B60L53/24—Using the vehicle's propulsion converter for charging
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/18—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries of two or more battery modules
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/24—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/24—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries
- B60L58/27—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries by heating
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/425—Structural combination with electronic components, e.g. electronic circuits integrated to the outside of the casing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/48—Accumulators combined with arrangements for measuring, testing or indicating the condition of cells, e.g. the level or density of the electrolyte
- H01M10/486—Accumulators combined with arrangements for measuring, testing or indicating the condition of cells, e.g. the level or density of the electrolyte for measuring temperature
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/60—Controlling or determining the temperature of the motor or of the drive
- H02P29/68—Controlling or determining the temperature of the motor or of the drive based on the temperature of a drive component or a semiconductor component
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/427—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/429—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/545—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/22—Standstill, e.g. zero speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/10—Emission reduction
- B60L2270/14—Emission reduction of noise
- B60L2270/142—Emission reduction of noise acoustic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2270/00—Problem solutions or means not otherwise provided for
- B60L2270/10—Emission reduction
- B60L2270/14—Emission reduction of noise
- B60L2270/145—Structure borne vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/425—Structural combination with electronic components, e.g. electronic circuits integrated to the outside of the casing
- H01M2010/4271—Battery management systems including electronic circuits, e.g. control of current or voltage to keep battery in healthy state, cell balancing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M2220/00—Batteries for particular applications
- H01M2220/20—Batteries in motive systems, e.g. vehicle, ship, plane
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- General Chemical & Material Sciences (AREA)
- Manufacturing & Machinery (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Ac Motors In General (AREA)
- Secondary Cells (AREA)
Abstract
本申请提供一种永磁电机的控制方法、装置、动力系统及电动汽车。通过获取永磁电机的共振带宽和永磁电机的定子固有频率等系统参数,设置永磁电机的通电频率,并在动力电池满足自加热条件时,使用通电频率的交流电为永磁电机供电,降低动力电池在自加热过程中电机产生的噪声。
Description
技术领域
本申请涉及电动汽车领域,更具体地,涉及一种永磁电机的控制方法、装置、动力系统及电动汽车。
背景技术
电动汽车是指由动力电池提供动力的汽车。由于动力电池材料限制,使其在额定环境温度下才能稳定地发挥出最佳性能,因此,在环境温度较低地区使用电动汽车时,需要将动力电池加热至额定环境温度。
现有动力电池加热方式可以分为间接加热和直接加热。间接加热就是指在动力电池外部放置热源进行加热。直接加热是指在动力电池内部对动力电池进行加热。其中,常见直接加热方式为通过电机加热。具体为:动力电池通过逆变器与电机连接,电机转子固定不转。动力电池和定子绕组形成闭合回路,定子绕组存储电能。由于动力电池内阻在低温环境时较大,动力电池绕组向动力电池施加交变的电流激励,动力电池利用自身的内阻进行加热。
然而,在利用电机对动力电池进行加热过程中噪声过大。
发明内容
本申请提供一种永磁电机的控制方法、装置、动力系统及电动汽车,可以降低动力电池自加热过程中的噪声。
第一方面,本申请提供一种永磁电机的控制方法,方法包括:
获取永磁电机的系统参数,系统参数包括:永磁电机的共振带宽和永磁电机的定子固有频率;
根据系统参数设置永磁电机的通电频率;
在动力电池满足自加热条件时,使用通电频率的交流电为永磁电机供电;
其中,通电频率的偶数倍位于共振频率带之外,共振频率带是根据永磁电机的定子固有频率和共振带宽确定的。
可选地,通电频率的偶数倍位于共振频率带之外,包括:
通电频率的偶数倍小于或等于共振频率带的下边界;或者
通电频率的偶数倍大于或等于共振频率带的上边界。
可选地,通电频率的偶数倍小于或等于共振频率带的下边界,具体为:

通电频率的偶数倍大于或等于共振频率带的上边界,具体为:

其中, 为永磁电机定子的第i阶固有频率,
为永磁电机定子的第i阶固有频率, 为通电频率,B为永磁电机定子的共振带
宽的1/2,M为永磁电机的定子固有频率的最高阶次,k为正整数。
为通电频率,B为永磁电机定子的共振带
宽的1/2,M为永磁电机的定子固有频率的最高阶次,k为正整数。
可选地,M=4。
上述发明中的一个实施例具有如下有益效果:考虑到电机振动主要是径向电磁力频率在电机定子的前4阶共振频率带内引起的,通过改变定子绕组的通电频率,使得通电频率的偶数倍统统避开定子前四阶的共振频率带,消除主要振动,降低控制难度。
可选地,方法还包括:
获取动力电池的电芯温度和永磁电机的运行状态;
相应地,动力电池满足自加热条件包括:
电芯温度小于预设温度阈值和运行状态为停止状态。
上述发明中的一个实施例具有如下有益效果:在动力电池的电芯温度小于预设温度阈值,以及电机运行状态为停止状态时,使永磁电机中通入通电频率位于共振频率带之外的交流电,能够避免由于电机中绕组作为储能元件向动力电池提供交变电流而产生振动的问题。
可选地,方法还包括:
获取占空比;
相应地,使用通电频率的交流电为永磁电机供电,具体包括:
根据通电频率和占空比生成脉宽调制信号,其中,信号用于为永磁电机提供通电频率的交流电。
上述发明中的一个实施例具有如下有益效果:根据通电频率和占空比生成控制逆变器的信号,使永磁电机中通入通电频率位于共振频率带之外的交流电,使得产生的径向电磁力的频率避开电机定子固有频率,降低由于径向电磁力共振产生的噪声。
第二方面,本申请提供一种永磁电机的控制装置,包括:
获取模块,获取永磁电机的系统参数,系统参数包括:永磁电机的共振带宽和永磁电机的定子固有频率;
确定模块,用于根据系统参数设置永磁电机的通电频率;
控制模块,用于在动力电池满足自加热条件时,使用通电频率的交流电为永磁电机供电,
其中,通电频率的偶数倍位于共振频率带之外,共振频率带是根据永磁电机的定子固有频率和共振带宽确定的。
可选地,通电频率的偶数倍位于共振频率带之外,包括:
通电频率的偶数倍小于或等于共振频率带的下边界;或者
通电频率的偶数倍大于或等于共振频率带的上边界。
可选地,通电频率的偶数倍小于或等于共振频率带的下边界,具体为:

通电频率的偶数倍大于或等于共振频率带的上边界,具体为:

其中, 为永磁电机定子的第i阶固有频率,
为永磁电机定子的第i阶固有频率,  为通电频率,B为永磁电机定子的共振
带宽的1/2,M为永磁电机的定子固有频率的最高阶次,k为正整数。
为通电频率,B为永磁电机定子的共振
带宽的1/2,M为永磁电机的定子固有频率的最高阶次,k为正整数。
可选地,M=4。
可选地,获取模块还用于:
获取动力电池的电芯温度和永磁电机的运行状态;
相应地,动力电池满足自加热条件包括:
电芯温度小于预设温度阈值和运行状态为停止状态。
可选地,获取模块还用于:
获取占空比;
相应地,控制模块具体用于:
根据通电频率和占空比生成脉宽调制信号,其中,脉宽调制信号用于为永磁电机提供通电频率的交流电。
第三方面,本申请提供一种动力系统,包括:动力电池、逆变器、永磁电机以及电机控制器,电机控制器用于执行第一方面及可选方案所涉及的永磁电机的控制方法。
第四方面,本申请提供一种电动汽车,包括动力系统,动力系统包括动力电池、逆变器、永磁电机以及电机控制器,电机控制器用于执行第一方面及可选方案所涉及的永磁电机的控制方法。
本申请永磁电机的控制方法、装置、动力系统及电动汽车,利用径向电磁力的频率为定子绕组通电频率的偶数倍关系,改变定子绕组的通电频率,使通电频率的偶数倍位于共振频率带之外,使得产生的径向电磁力的频率避开电机定子固有频率,降低由于径向电磁力共振产生的噪声。
附图说明
图1为本申请提供的电动汽车的动力系统的结构示意图;
图2为本申请提供的动力电池的结构示意图;
图3为本申请实施例一提供的永磁电机控制方法的流程图;
图4为本申请实施例三提供的永磁电机控制装置的结构示意图;
图5为本申请实施例四提供的控制设备的结构示意图;
图6为本申请实施例五提供的电动汽车的结构示意图。
具体实施方式
为使本申请的目的、技术方案和优点更加清楚,下面将结合本申请中的附图,对本申请中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的带。
电动汽车是指由动力电池提供动力的汽车。如图1所示,电动汽车的动力系统100包括动力电池10、逆变器20、电机30和电机控制器(Motor Controller Unit,简称:MCU)40。动力电池10的正负极与逆变器20的直流侧连接,逆变器20的交流侧与电机30的定子绕组连接。动力电池10通过逆变器20向电机供电。MCU 40设有多个输入端,用于接收电机运行状态数据、以及电机控制指令。MCU40根据电机控制指令、电机运行状态数据以及动力电池的运行状态数据,生成脉宽调制(Pulse Width Modulation,简称:PWM)信号,控制逆变器向电机30提供电压和电流大小,以控制电机转速,以实现汽车行驶速度控制。
如图2所示,动力电池10包括电池模组101、电池管理系统(Battery ManagementSystem,简称:BMS)102、以及辅助结构103。其中,电池模组101由多个动力电芯串并联而成,动力电芯是动力电池的核心部件,是动力电池提供电能的来源。电池管理系统102主要功能是进行充放电管理、高压控制、评估电池状态、采集电池数据、电池保护以及电池热管理。辅助结构103通常包括外部框架、电连接装置以及绝缘部件等。外部框架起到保护、支撑电池模组等作用,电连接装置起到连接其他用电设备的作用,例如:与逆变器连接,绝缘部分起到绝缘保护作用。
其中,电池管理系统102中热管理功能用于确保动力电池工作在适宜温度范围内。热管理功能主要是实现电池温度的准确测量和监控,电池组温度过高时有效散热,低温条件下的快速加热,以及保证电池组温度场的均匀分布。其中,低温条件下的快速加热是指:在电芯温度较低地区使用时,需要将动力电池加热至额定电芯温度,以使动力电池稳定地发挥出最佳性能。
现有动力电池加热方式可以分为间接加热和直接加热。间接加热就是指在动力电池外部放置热源进行加热。间接加热方法可以是空气加热、液体加热以及加热膜加热等。不同的加热源,电池的加热速率也会有所不同。由于是通过外部热源对电池进行加热,在传热介质上将会产生热损耗,因此,间接加热的效率并不高。
直接加热是指在内部对动力电池进行加热。其中,常见直接加热方式为通过内阻加热,具体为:固定电机转子,向逆变器的控制端输入PWM信号,动力电池和定子绕组形成闭合回路,定子绕组存储电能。由于定子绕组的电感特性,定子绕组又向电池提供交变电流,动力电池利用交变电流流过自身内阻进行加热。由于动力电池内阻在低温环境时较大,动力电池的加热效率较高。
然而,现有通过动力电池内阻进行加热方式,电机在向动力电池提供加热电流时,利用定子绕组作为储能元件,实现母线电流的交变,上述方式改变电机正常工作时的磁场分布,使得电机内部受力不平衡,容易引起电机产生振动和噪声,使得电动汽车的NVH三相指标不达标。其中,NVH就是Noise,Vibration和Harshness的简称,分别表示噪声、振动以及声振粗糙度,是衡量汽车舒适度的重要指标。
本申请提供一种永磁电机的控制方法、装置、动力系统及电动汽车,旨在解决上述问题。本申请的发明构思是:根据永磁电机的系统参数确定永磁电机的共振频率,通过控制永磁电机的通电频率的偶数倍位于共振频率带之外,使得永磁电机的振动频率远离永磁电机的转子共振频率,减少电机振动,进而减少由振动产生的噪声,以提升用户在乘坐汽车时的舒适度。
下面结合实施例重点描述本申请提供永磁电机的控制方法,该控制方法的执行主体为MCU,图3为本申请实施例一提供的永磁电机控制方法的流程图,如图3所示,本申请提供的永磁电机的控制方法包括如下步骤:
S201、MCU获取永磁电机的系统参数。
其中,永磁电机的系统参数包括永磁电机的共振带宽和永磁电机的定子固有频率。
S202、MCU根据系统参数设置永磁电机的通电频率。
其中,根据系统参数设置永磁电机的通电频率,具体包括:根据永磁电机的定子固有频率和共振带宽确定共振频率带,根据共振频率带确定通电频率,设置永磁电机的通电频率的偶数倍位于共振频率带之外。
S203、MCU在动力电池满足自加热条件时,使用通电频率的交流电为永磁电机供电。
其中,动力电池满足自加热条件包括:动力电池的电芯温度小于预设温度阈值和永磁电机的运行状态为停止状态。其中,停止状态是指转子静止或者转子处于堵转状态。
在本申请实施例提供的控制方法中,根据定子固有频率和共振带宽确定定子的共振频率带,在永磁电机中通入通电频率的偶数倍位于共振频率带之外的交流电,降低动力电池自加热过程中的噪声。
下面描述本申请实施例二提供的永磁电机控制方法,本申请提供的永磁电机的控制方法包括如下步骤:
S301、MCU获取永磁电机的系统参数。
其中,永磁电机的系统参数包括永磁电机的共振带宽和永磁电机的定子固有频率。在获取定子固有频率时,作为一种实施方式,通过对永磁电机进行振动测试,测出永磁电机的定子固有频率。作为另一种实施方式还可以通过对永磁电机的结构参数进行计算,结构参数包括:定子质量分布、定子刚度等。由于在前几阶的定子固有频率内发生共振的振动幅值远大于在高阶的定子固有频率内发生振动的振动幅值,因此,选取前几阶定子固有频率进行通电频率设置,以降低MCU的控制复杂度,优选地,选取前4阶定子固有频率进行通电频率设置,消除主要振动,降低控制难度。
S302、MCU根据系统参数设置永磁电机的通电频率。
其中,据永磁电机的定子固有频率和共振带宽确定共振频率带,具体包括:
若永磁电机的定子固有频率表示为 ,其中,i=1、2、……、N,i表示固有频率的阶次,B
为永磁电机定子的共振带宽的1/2,则共振频率带表示为:
,其中,i=1、2、……、N,i表示固有频率的阶次,B
为永磁电机定子的共振带宽的1/2,则共振频率带表示为:
其中, 表示共振频率带的下边界,
表示共振频率带的下边界, 表示共振频率带的上边界。
表示共振频率带的上边界。
相应地,永磁电机的通电频率的偶数倍位于共振频率带之外,具体包括:通电频率的偶数倍小于或等于共振频率带的下边界;或者通电频率的偶数倍大于或等于共振频率带的上边界。也就是使永磁电机的通电频率满足如下关系:
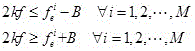
其中,M为永磁电机的定子固有频率的最高阶次,k为正整数。
S303、MCU获取动力电池的电芯温度和永磁电机的运行状态。
其中,在获取动力电池的电芯温度时,通过设置在动力电池内部的传感器检测动力电池的电芯温度。在获取永磁电机的运行状态时,通过设置在永磁电机上的传感器检测转子的运动状态。
S304、MCU在动力电池满足自加热条件时,使用通电频率的交流电为永磁电机供电。
其中,动力电池的电芯温度小于预设温度阈值,并且永磁电机的运行状态为停止状态时,使用通电频率的交流电为永磁电机供电,能够避免由于电机中绕组作为储能元件向动力电池提供交变电流而产生振动的问题。
其中,在使用通电频率的交流电为永磁电机供电时,MCU根据通电频率和预先设定的占空比生成PWM信号,逆变器的控制端接收PWM信号,输出频率为通电频率的交流电,永磁电机的绕组中通入频率为通电频率的交流电,通电频率的偶数倍位于定子共振频率带之外,径向电磁力的频率为定子绕组通电频率的偶数倍关系,使得径向电磁力的频率避开共振频率带,进而减少由径向电磁力引起的共振,以达到减小电机振动的问题。
下面三相永磁同步电机为例描述本实施例提供的控制方法的可行性。电机本体振动噪声的主要来源可以分为径向电磁力、切向电磁力、不平衡磁拉力、不平衡机械力和磁滞伸缩力。以电动汽车最常用的8极48槽电机为例,其电机径向电磁力的幅值往往远高于其他四大噪声来源,也是电动汽车噪声的主要来源。因此,消除径向电磁力,既可以有效将噪声抑制在噪声阈值范围内。
可以将电机定子等效的看成一个由硅钢片叠压制成的圆筒,由于定子的振动形状是固有的,定子对应有不同阶次的振动形状,且每个振动形状都对应一个固有的频率。
对于电机的振动,径向电磁力沿空间的分布形状和频率是两个重要因素。首先,当电机径向电磁力沿空间的分布与定子前四阶任意一阶定子振动形状一致时,这时即使未达到共振频率,其强迫振动的幅值也会比不匹配时大得多。其次,定子每一振动阶次对应的固有频率大小与径向电磁力的频率大小一致时将会发生共振,此时径向电磁力的幅值也会增强很多。由于径向电磁力沿空间的分布需要改变电机的结构,所以通过改变径向电磁力的频率避开共振频率是最为行之有效的方法。
下面描述如何计算获得径向电磁力频率。与电机正常运行工况下定子绕组产生的圆形旋转磁场不同,电池自加热技术使得电机定子绕组产生的是一个脉振的磁动势,此时电机气隙磁密的谐波含量会更高,从而会产生更多的低阶低频的径向电磁力。此时计算电磁力,电机的气隙形状不能按圆形进行计算,而是要按椭圆形进行等效处理。具体的椭圆变形量与定子绕组的通电频率和电流大小有关,通电频率越高,电流大小越大,椭圆的变形量就越大。
通过有限元仿真模拟定子变形,得到的径向电磁力分布,得出如下结论:在电池自加热控制策略下,径向电磁力波中的主要谐波含量会有所减小,但是会产生附加的时空谐波成分,这些附加的谐波含量会产生许多低阶低频的径向电磁力波的分量,从而对电机的电磁振动产生更大的影响。也就是说,在电池自加热工况下,径向电磁力的空间阶次发生了变化,会产生许多阶次低的电磁力,但是不会产生新的电磁力频率。这时,径向电磁力的频率可以按照电机常规运行工况下公式进行计算。
电机径向电磁力是电机定子磁场和转子磁场相互作用引起的,由于电机结构及绕线的布线方式等原因将会引起定子谐波磁场和转子谐波磁场,定子基波磁场、定子谐波磁场与转子基波磁场、转子谐波磁场,所以,径向电磁力不仅是定子基波磁场和转子基波磁场相互作用产生的,定子与转子同次谐波磁场相互作用、定子谐波磁场的相互作用也会产生不同频率的径向电磁力。因此,定子通三相对称交流电时,径向电磁力的频率计算过程如下:

其中, 表示径向电磁力,
表示径向电磁力, 表示定子磁密,
表示定子磁密, 表示转子磁密,
表示转子磁密, 表示空气导磁
率。
表示空气导磁
率。

其中,公式(2)、(3)中, 表示等效气隙磁导,α为气隙沿圆周的角度,t表示时间,
表示等效气隙磁导,α为气隙沿圆周的角度,t表示时间,  表示三相对称定子绕组产生的磁动势,
表示三相对称定子绕组产生的磁动势, 表示转子永磁体产生的磁动势。
表示转子永磁体产生的磁动势。
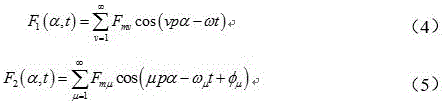
其中,公式(4)、(5)中,v表示定子谐波次数;μ表示转子谐波次数, 为定子角频率;
为定子角频率; 为定子v次谐波磁动势幅值;
为定子v次谐波磁动势幅值; 为转子μ次谐波磁动势幅值;
为转子μ次谐波磁动势幅值; 为转子μ次谐波磁动势
的电角频率,电池加热控制策略下,取为0;
为转子μ次谐波磁动势
的电角频率,电池加热控制策略下,取为0; 为转子μ次谐波磁动势与初始位置的夹角,p
为极对数。
为转子μ次谐波磁动势与初始位置的夹角,p
为极对数。
将公式(2)~(5)代入到公式(1)中,利用积化和差公式即可得到径向电磁力频率、转子磁场的谐波和定子磁场的谐波。下面以定子磁场和转子磁场的前13次谐波产生的径向电磁力与频率的关系为例,进行说明。如表1所示。
表1为径向电磁力的频率
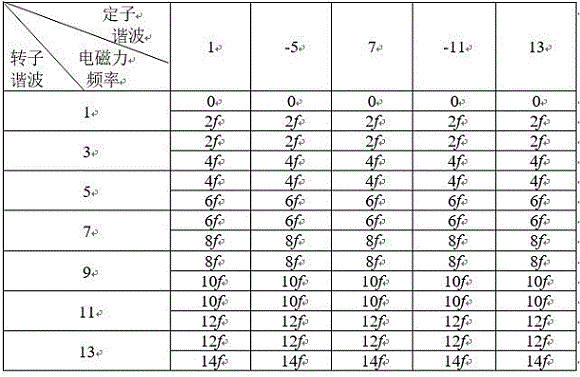
从表1可以得到,径向电磁力的频率总是和绕组通电频率的存在偶次倍数的关系。并从表中可以推出径向电磁力的频率与通电频率的关系为:(μ±1)f,其中f表示绕组通电频率。在本申请实施例提供的控制方法,利用径向电磁力的频率为定子绕组通电频率的偶数倍关系,MCU使逆变器输出通电频率的偶数倍在定子共振频率带之外的交流电,使电机产生的径向电磁力的频率避开电机定子固有频率,降低由于径向电磁力共振产生的噪声。
图4为本申请实施例三提供的永磁电机控制装置的结构示意图,永磁电机控制装置400用于执行上述实施例提供的永磁电机的控制方法。如图4所示,本申请实施例三提供的永磁电机的控制装置400,包括:
获取模块401,用于获取永磁电机的系统参数,系统参数包括:永磁电机的共振带宽和永磁电机的定子固有频率;
确定模块402,用于根据系统参数设置永磁电机的通电频率;
控制模块403,用于在动力电池满足自加热条件时,使用通电频率的交流电为永磁电机供电;
其中,通电频率的偶数倍位于共振频率带之外,共振频率带是根据永磁电机的定子固有频率和共振带宽确定的。
可选地,通电频率的偶数倍位于共振频率带之外,包括:
通电频率的偶数倍小于或等于共振频率带的下边界;或者
通电频率的偶数倍大于或等于共振频率带的上边界。
可选地,通电频率的偶数倍小于或等于共振频率带的下边界,具体为:

通电频率的偶数倍大于或等于共振频率带的上边界,具体为:

其中, 为永磁电机定子的第i阶固有频率,
为永磁电机定子的第i阶固有频率,  为通电频率,B为永磁电机定子的共振
带宽的1/2,M为永磁电机的定子固有频率的最高阶次,k为正整数。
为通电频率,B为永磁电机定子的共振
带宽的1/2,M为永磁电机的定子固有频率的最高阶次,k为正整数。
可选地,M=4。
可选地,获取模块401还用于:
获取动力电池的电芯温度和永磁电机的运行状态;
相应地,动力电池满足自加热条件包括:
电芯温度小于预设温度阈值和运行状态为停止状态。
可选地,获取模块401还用于:获取占空比;
相应地,控制模块403具体包括:
根据通电频率和占空比生成PWM信号,其中,PWM信号用于为永磁电机提供通电频率的交流电。
图5为本申请实施例四示出的控制设备的结构示意图。如图5所示,本实施例提供的控制设备500包括:存储器501、及处理器502。
存储器501,用于存储计算机执行指令;
处理器502,用于执行存储器存储的计算机执行指令,以实现上述实施例中永磁电机控制方法所执行的各个步骤。具体可以参见前述永磁电机控制方法实施例中的相关描述。
可选地,上述存储器501既可以是独立的,也可以跟处理器502集成在一起。
当存储器501独立设置时,该控制设备还包括总线,用于连接存储器501和处理器502。
本申请实施例还提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机执行指令,当处理器执行计算机执行指令时,实现如上控制设备所执行的永磁电机控制方法。
本申请实施例还提供一种动力系统,包括:动力电池、逆变器、永磁电机以及电机控制器,电机控制器用于执行上述实施例提供的永磁电机的控制方法。
如图6所示,本申请实施例还提供一种电动汽车,包括上述实施例的动力系统100,动力系统100包括动力电池10、逆变器20、永磁电机30以及电机控制器MCU 40,MCU 40用于执行上述实施例提供的永磁电机控制方法。
为了进一步减少电机振动对整车汽车舒适度的影响,继续参考图6所示,在整车上安装一个声学包604以及加一套主动降噪系统600。
具有隔音与吸引效果的声学包604将电机包裹住,能够减少电机噪声。主动降噪系统600包括检测单元601、输出单元602和控制单元603。检测单元601和输出单元602分别与控制单元603连接。下面结合图6来说明主动降噪系统的工作原理:检测单元601位于机舱内,检测单元601用于采集电机产生的噪声,并将电机产生的噪声传输至控制单元603中。控制单元603通过算法输出一个与噪声相位相差180°、幅值相同的声波。并由输出单元602输出该声波,进而抵消电机噪声。其中,检测单元601可以为麦克风,输出单元602为播放器。输出单元602可以位于机舱,也可以位于乘客舱,提高乘客舒适度。
通过改变MCU控制频率减少振动,再结合声学包以及主动降噪方案,能有效的降低电池自加热技术带来的电机振动,并且能在原有基础上进一步优化电机的振动。其中对电机振动要求较低的场合,任意两种降噪方案的组合也能起到降低电机振动的作用,以使电动汽车的NVH三项指标达标。
最后应说明的是:以上各实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述各实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案。
Claims (14)
1.一种永磁电机的控制方法,其特征在于,所述方法包括:
获取所述永磁电机的系统参数,所述系统参数包括:所述永磁电机的共振带宽和所述永磁电机的定子固有频率;
根据所述系统参数设置所述永磁电机的通电频率;
在动力电池满足自加热条件时,使用所述通电频率的交流电为所述永磁电机供电;
其中,所述通电频率的偶数倍位于共振频率带之外,所述共振频率带是根据永磁电机的定子固有频率和共振带宽确定的。
2.根据权利要求1所述的方法,其特征在于,所述通电频率的偶数倍位于共振频率带之外,包括:
所述通电频率的偶数倍小于或等于所述共振频率带的下边界;或者
所述通电频率的偶数倍大于或等于所述共振频率带的上边界。
3.根据权利要求2所述的方法,其特征在于,
所述通电频率的偶数倍小于或等于所述共振频率带的下边界,具体为:

所述通电频率的偶数倍大于或等于所述共振频率带的上边界,具体为:

其中, 为所述永磁电机定子的第i阶固有频率,
为所述永磁电机定子的第i阶固有频率, 为所述通电频率,B为所述永磁电机
定子的共振带宽的1/2,M为所述永磁电机的定子固有频率的最高阶次,k为正整数。
为所述通电频率,B为所述永磁电机
定子的共振带宽的1/2,M为所述永磁电机的定子固有频率的最高阶次,k为正整数。
4.根据权利要求3所述的方法,其特征在于,M=4。
5.根据权利要求1至4中任意一项所述的方法,其特征在于,所述方法还包括:
获取所述动力电池的电芯温度和所述永磁电机的运行状态;
相应地,所述动力电池满足自加热条件包括:
所述电芯温度小于预设温度阈值和所述运行状态为停止状态。
6.根据权利要求1至4中任意一项所述的方法,其特征在于,所述方法还包括:
获取占空比;
相应地,使用所述通电频率的交流电为所述永磁电机供电,具体包括:
根据所述通电频率和所述占空比生成脉宽调制信号,其中,所述信号用于为所述永磁电机提供所述通电频率的交流电。
7.一种永磁电机的控制装置,其特征在于,包括:
获取模块,用于获取所述永磁电机的系统参数,所述系统参数包括:所述永磁电机的共振带宽和所述永磁电机的定子固有频率;
确定模块,用于根据所述系统参数设置所述永磁电机的通电频率;
控制模块,用于在动力电池满足自加热条件时,使用所述通电频率的交流电为所述永磁电机供电;
其中,所述通电频率的偶数倍位于共振频率带之外,所述共振频率带是根据永磁电机的定子固有频率和共振带宽确定的。
8.根据权利要求7所述的装置,其特征在于,所述通电频率的偶数倍位于共振频率带之外,包括:
所述通电频率的偶数倍小于或等于所述共振频率带的下边界;或者
所述通电频率的偶数倍大于或等于所述共振频率带的上边界。
9.根据权利要求8所述的装置,其特征在于,
所述通电频率的偶数倍小于或等于所述共振频率带的下边界,具体为:

所述通电频率的偶数倍大于或等于所述共振频率带的上边界,具体为:

其中, 为所述永磁电机定子的第i阶固有频率,
为所述永磁电机定子的第i阶固有频率, 为所述通电频率,B为所述永磁电机
定子的共振带宽的1/2,M为所述永磁电机的定子固有频率的最高阶次,k为正整数。
为所述通电频率,B为所述永磁电机
定子的共振带宽的1/2,M为所述永磁电机的定子固有频率的最高阶次,k为正整数。
10.根据权利要求9所述的装置,其特征在于,M=4。
11.根据权利要求7至10中任意一项所述的装置,其特征在于,获取模块还用于:
获取所述动力电池的电芯温度和所述永磁电机的运行状态;
相应地,所述动力电池满足自加热条件包括:
所述电芯温度小于预设温度阈值和所述运行状态为停止状态。
12.根据权利要求7至10中任意一项所述的装置,其特征在于,获取模块还用于:
获取占空比;
相应地,控制模块具体用于:
根据所述通电频率和所述占空比生成脉宽调制信号,其中,所述信号用于为所述永磁电机提供所述通电频率的交流电。
13.一种动力系统,其特征在于,包括:动力电池、逆变器、永磁电机以及电机控制器,所述电机控制器用于执行如权利要求1至6任一项所述永磁电机的控制方法。
14.一种电动汽车,其特征在于,包括动力系统,所述动力系统包括动力电池、逆变器、永磁电机以及电机控制器,所述电机控制器用于执行如权利要求1至6任一项所述永磁电机的控制方法。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010540328.8A CN111439132B (zh) | 2020-06-15 | 2020-06-15 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
| HUE20923709A HUE061805T2 (hu) | 2020-06-15 | 2020-10-15 | Eljárás és berendezés állandó mágneses motor vezérlésére, energiaellátó rendszer és elektromos jármû |
| EP20923709.8A EP3957512B1 (en) | 2020-06-15 | 2020-10-15 | Method and device for controlling permanent magnet motor, power system, and electric vehicle |
| JP2022537768A JP7263628B2 (ja) | 2020-06-15 | 2020-10-15 | 永久磁石モーターの制御方法、装置、動力システム及び電気自動車 |
| PCT/CN2020/121300 WO2021253694A1 (zh) | 2020-06-15 | 2020-10-15 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
| KR1020227033422A KR102563499B1 (ko) | 2020-06-15 | 2020-10-15 | 영구자석 모터의 제어 방법, 장치, 파워 시스템 및 전기 자동차 |
| US17/529,511 US11309826B2 (en) | 2020-06-15 | 2021-11-18 | Method and apparatus for controlling permanent magnet motor, power system and electric vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010540328.8A CN111439132B (zh) | 2020-06-15 | 2020-06-15 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111439132A true CN111439132A (zh) | 2020-07-24 |
| CN111439132B CN111439132B (zh) | 2020-11-17 |
Family
ID=71655546
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010540328.8A Active CN111439132B (zh) | 2020-06-15 | 2020-06-15 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11309826B2 (zh) |
| EP (1) | EP3957512B1 (zh) |
| JP (1) | JP7263628B2 (zh) |
| KR (1) | KR102563499B1 (zh) |
| CN (1) | CN111439132B (zh) |
| HU (1) | HUE061805T2 (zh) |
| WO (1) | WO2021253694A1 (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113715692A (zh) * | 2021-09-28 | 2021-11-30 | 重庆长安新能源汽车科技有限公司 | 电动汽车的动力电池脉冲加热噪音的控制系统及控制方法 |
| WO2021253694A1 (zh) * | 2020-06-15 | 2021-12-23 | 江苏时代新能源科技有限公司 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
| CN114555415A (zh) * | 2020-07-31 | 2022-05-27 | 宁德时代新能源科技股份有限公司 | 电机、动力系统、控制方法以及电动汽车 |
| CN114670656A (zh) * | 2020-12-24 | 2022-06-28 | 宁德时代新能源科技股份有限公司 | 控制方法、装置、动力系统及电动汽车 |
| US11418143B2 (en) | 2020-12-24 | 2022-08-16 | Contemporary Amperex Technology Co., Limited | Control method and apparatus, power system, and electric vehicle |
| CN117621865A (zh) * | 2022-08-18 | 2024-03-01 | 比亚迪股份有限公司 | 一种抑制电池自加热过程中车辆震动的方法、装置及汽车 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022070233A1 (ja) * | 2020-09-29 | 2022-04-07 | 日本電気株式会社 | 通信制御装置、操作端末、機器操作システム、通信制御方法、操作端末制御方法及びプログラム |
| CN114997025B (zh) * | 2022-07-04 | 2025-09-09 | 南京埃斯顿自动化股份有限公司 | 一种转矩脉动和振动噪声耦合时空谐波鉴别与抑制方法 |
| CN116341236B (zh) * | 2023-03-21 | 2025-09-16 | 南京师范大学 | 一种盘式永磁电机转子固有频率解析计算方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1767370A (zh) * | 2004-10-07 | 2006-05-03 | 丰田自动车株式会社 | 对输出转矩具有振动减小控制功能的电机驱动装置 |
| JP2010259217A (ja) * | 2009-04-24 | 2010-11-11 | Toyota Motor Corp | 駆動装置 |
| CN105932363A (zh) * | 2016-05-16 | 2016-09-07 | 北京理工大学 | 一种电源系统的自加热方法 |
| CN110557079A (zh) * | 2018-06-04 | 2019-12-10 | 福特全球技术公司 | 基于马达运转区域的随机脉冲宽度调制 |
| CN110651426A (zh) * | 2017-06-15 | 2020-01-03 | 松下知识产权经营株式会社 | 电动机控制装置和电动机控制方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005176484A (ja) | 2003-12-10 | 2005-06-30 | Honda Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP2013027105A (ja) * | 2011-07-19 | 2013-02-04 | Toshiba Corp | モータ駆動回路、および、モータ駆動システム |
| CN103560304B (zh) * | 2013-11-19 | 2016-05-04 | 东风汽车公司 | 一种电动汽车动力电池组加热控制方法 |
| JP6015707B2 (ja) * | 2014-05-08 | 2016-10-26 | トヨタ自動車株式会社 | ハイブリッド車両の動力制御システム |
| FR3030124B1 (fr) * | 2014-12-16 | 2019-10-11 | Renault S.A.S | Procede de gestion d'un groupe motopropulseur hybride d'un vehicule automobile |
| WO2018042895A1 (ja) | 2016-09-05 | 2018-03-08 | 日立オートモティブシステムズ株式会社 | 回転電動機の制御方法および制御装置、並びに回転電動機駆動システム |
| US10184917B2 (en) * | 2016-09-08 | 2019-01-22 | Linestream Technologies | Method for automatically identifying resonance |
| US10027262B2 (en) * | 2016-09-13 | 2018-07-17 | Ford Global Technologies, Llc | Pseudorandom PWM variation based on motor operating point |
| JP6715759B2 (ja) * | 2016-12-28 | 2020-07-01 | 日立オートモティブシステムズ株式会社 | インバータ駆動装置およびそれを用いた電動車両システム |
| CN107666028A (zh) * | 2017-08-16 | 2018-02-06 | 同济大学 | 一种电动车用锂离子电池低温交流加热装置 |
| CN110048192A (zh) * | 2019-03-20 | 2019-07-23 | 石不凡 | 一种动力电池预加热方法 |
| CN109823234B (zh) * | 2019-04-23 | 2019-07-16 | 上海汽车集团股份有限公司 | 一种驱动系统的控制方法、驱动系统及新能源汽车 |
| CN111439132B (zh) * | 2020-06-15 | 2020-11-17 | 江苏时代新能源科技有限公司 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
-
2020
- 2020-06-15 CN CN202010540328.8A patent/CN111439132B/zh active Active
- 2020-10-15 JP JP2022537768A patent/JP7263628B2/ja active Active
- 2020-10-15 EP EP20923709.8A patent/EP3957512B1/en active Active
- 2020-10-15 WO PCT/CN2020/121300 patent/WO2021253694A1/zh not_active Ceased
- 2020-10-15 KR KR1020227033422A patent/KR102563499B1/ko active Active
- 2020-10-15 HU HUE20923709A patent/HUE061805T2/hu unknown
-
2021
- 2021-11-18 US US17/529,511 patent/US11309826B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1767370A (zh) * | 2004-10-07 | 2006-05-03 | 丰田自动车株式会社 | 对输出转矩具有振动减小控制功能的电机驱动装置 |
| CN100346572C (zh) * | 2004-10-07 | 2007-10-31 | 丰田自动车株式会社 | 对输出转矩具有振动减小控制功能的电机驱动装置 |
| JP2010259217A (ja) * | 2009-04-24 | 2010-11-11 | Toyota Motor Corp | 駆動装置 |
| CN105932363A (zh) * | 2016-05-16 | 2016-09-07 | 北京理工大学 | 一种电源系统的自加热方法 |
| CN110651426A (zh) * | 2017-06-15 | 2020-01-03 | 松下知识产权经营株式会社 | 电动机控制装置和电动机控制方法 |
| CN110557079A (zh) * | 2018-06-04 | 2019-12-10 | 福特全球技术公司 | 基于马达运转区域的随机脉冲宽度调制 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021253694A1 (zh) * | 2020-06-15 | 2021-12-23 | 江苏时代新能源科技有限公司 | 永磁电机的控制方法、装置、动力系统及电动汽车 |
| US11309826B2 (en) | 2020-06-15 | 2022-04-19 | Jiangsu Contemporary Amperex Technology Limited | Method and apparatus for controlling permanent magnet motor, power system and electric vehicle |
| US12401246B2 (en) | 2020-07-31 | 2025-08-26 | Contemporary Amperex Technology (Hong Kong) Limited | Motor, power system, control method, and electric vehicle |
| CN114555415A (zh) * | 2020-07-31 | 2022-05-27 | 宁德时代新能源科技股份有限公司 | 电机、动力系统、控制方法以及电动汽车 |
| US11418143B2 (en) | 2020-12-24 | 2022-08-16 | Contemporary Amperex Technology Co., Limited | Control method and apparatus, power system, and electric vehicle |
| WO2022134640A1 (zh) * | 2020-12-24 | 2022-06-30 | 宁德时代新能源科技股份有限公司 | 控制方法、装置、动力系统及电动汽车 |
| WO2022134266A1 (zh) * | 2020-12-24 | 2022-06-30 | 宁德时代新能源科技股份有限公司 | 控制方法、装置、动力系统及电动汽车 |
| KR20220093044A (ko) * | 2020-12-24 | 2022-07-05 | 컨템포러리 엠퍼렉스 테크놀로지 씨오., 리미티드 | 제어 방법, 장치, 동력 시스템 및 전기 자동차 |
| EP4046862A4 (en) * | 2020-12-24 | 2022-08-24 | Contemporary Amperex Technology Co., Limited | CONTROL METHOD AND DEVICE, POWER SYSTEM AND ELECTRIC VEHICLE |
| CN116250114A (zh) * | 2020-12-24 | 2023-06-09 | 宁德时代新能源科技股份有限公司 | 控制方法、装置、动力系统及电动汽车 |
| EP4067161A4 (en) * | 2020-12-24 | 2023-07-19 | Contemporary Amperex Technology Co., Limited | CONTROL METHOD, DEVICE, POWER SYSTEM AND ELECTRICAL VEHICLE |
| US12249945B2 (en) | 2020-12-24 | 2025-03-11 | Contemporary Amperex Technology (Hong Kong) Limited | Control method, device, power system and electric vehicle |
| CN114670656A (zh) * | 2020-12-24 | 2022-06-28 | 宁德时代新能源科技股份有限公司 | 控制方法、装置、动力系统及电动汽车 |
| KR102865086B1 (ko) * | 2020-12-24 | 2025-09-25 | 컨템포러리 엠퍼렉스 테크놀로지 (홍콩) 리미티드 | 제어 방법, 장치, 동력 시스템 및 전기 자동차 |
| CN116250114B (zh) * | 2020-12-24 | 2025-10-31 | 宁德时代新能源科技股份有限公司 | 控制方法、装置、动力系统及电动汽车 |
| CN113715692A (zh) * | 2021-09-28 | 2021-11-30 | 重庆长安新能源汽车科技有限公司 | 电动汽车的动力电池脉冲加热噪音的控制系统及控制方法 |
| CN117621865A (zh) * | 2022-08-18 | 2024-03-01 | 比亚迪股份有限公司 | 一种抑制电池自加热过程中车辆震动的方法、装置及汽车 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021253694A1 (zh) | 2021-12-23 |
| US11309826B2 (en) | 2022-04-19 |
| EP3957512A4 (en) | 2022-06-01 |
| JP7263628B2 (ja) | 2023-04-24 |
| EP3957512A1 (en) | 2022-02-23 |
| US20220077811A1 (en) | 2022-03-10 |
| JP2022553436A (ja) | 2022-12-22 |
| EP3957512B1 (en) | 2023-04-12 |
| HUE061805T2 (hu) | 2023-08-28 |
| KR102563499B1 (ko) | 2023-08-07 |
| KR20220137153A (ko) | 2022-10-11 |
| CN111439132B (zh) | 2020-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111439132B (zh) | 永磁电机的控制方法、装置、动力系统及电动汽车 | |
| Deng et al. | Electromagnetic vibration and noise of the permanent-magnet synchronous motors for electric vehicles: An overview | |
| Dos Santos et al. | Multiphysics NVH modeling: Simulation of a switched reluctance motor for an electric vehicle | |
| CN116250114B (zh) | 控制方法、装置、动力系统及电动汽车 | |
| CN102742151B (zh) | 旋转电机控制系统及旋转电机的磁体温度操作方法 | |
| Wallmark | On control of permanent-magnet synchronous motors in hybrid-electric vehicle applications | |
| CN113381670B (zh) | 一种多三相永磁同步电机高频pwm振动抑制方法及系统 | |
| Wang et al. | General topology derivation methods and control strategies of field winding-based flux adjustable PM machines for generator system in more electric aircraft | |
| CN114402514B (zh) | 电机、控制方法、动力系统以及电动汽车 | |
| CN102315811B (zh) | 发电机的非正弦电流波形激励的系统和方法 | |
| Li et al. | Analysis of vibration and noise of IPMSM for electric vehicles under inverter harmonic in a wide-speed range | |
| Shi et al. | Analysis of electromagnetic vibration and noise of permanent magnet synchronous motor based on field-circuit coupling | |
| Li et al. | Vibration noise suppression approach based on random switching frequency control for permanent magnet motor | |
| Wolk et al. | Iron loss analysis of an electrically excited synchronous motor under space vector pwm for automotive traction application | |
| Li et al. | Electromagnetic vibration and noise analysis of IPMSM for electric vehicles under different working conditions | |
| Bai et al. | Operating-Mode-Oriented Vibration Collaborative Suppression for a Permanent Magnet Brushless Motor from Perspectives of Different Vibration Sources | |
| JP5696743B2 (ja) | 回転電機制御システム | |
| Choi et al. | Characteristic analysis on synchronous machine with double-side permanent magnet rotor for flywheel energy storage system in EV | |
| Laskaris et al. | High performance traction motor design and construction for small passenger electric car | |
| Jing et al. | Research on motor mode control based on the motor frequency control in dual motor hybrid system | |
| Jin et al. | Simulation and Analysis of Stator Short-circuit Fault of Permanent Magnet Vernier Motor | |
| Fan et al. | Analytical Prediction of Magnetic Field and Electromagnetic Performance for Surface-Inset Pm In-Wheel Motors Considering Iron's Magnetization Nonlinearity | |
| Afjei et al. | Comparison between two field-assisted switched reluctance generators suitable for wind turbine applications |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |