-
Die
vorliegende Erfindung betrifft ein Verfahren zum Steuern der Orientierung
einer Kranlast, wobei ein Manipulator zum Handhaben der Last durch
eine Rotatoreinrichtung mit einem an Seilen hängenden Haken verbunden ist
und der Drehwinkel φL der Last durch eine Steuereinrichtung unter
Verwendung des Trägheitsmoments
JL der Last als wichtigster Parameter gesteuert
wird.
-
In
DE 100 64 182 und
DE 103 24 692 , deren gesamter
Inhalt durch Erwähnung
in die vorliegende Anmeldung aufgenommen wird, werden Steuer- und
Automatisierungskonzepte für
Hafenmobilkräne
offenbart. Bei diesen Drehauslegerkranen hängt der Manipulator zum Aufnehmen
der Last an Seilen, und ein Positionieren des Manipulators zum Aufnehmen
von Containern verursacht Kugelpendelbewegungen. Die Steuerkonzepte
verwenden eine Bahnnachverfolgungssteuerung zum Steuern der Bewegung
der Last und zum automatischen Vermeiden von Pendeln, wodurch die
Effektivität
des Frachtgutumschlagprozesses verbessert wird.
-
Für solche
Steuersysteme ist ein Verfahren zum Steuern der Orientierung der
Kranlast aus
DE 100 29 579 bekannt,
deren gesamter Inhalt durch Erwähnung
in die vorliegende Erfindung aufgenommen wird. Dort weist der an
Seilen hängende
Haken eine einen Hydraulikantrieb enthaltende Rotatoreinrichtung
auf, so dass der Manipulator zum Aufnehmen von Containern um eine
vertikale Achse gedreht werden kann. Dadurch ist es möglich, die
Orientierung der Kranlasten zu verändern. Wenn der Kranführer bzw.
die automatische Steuerung ein Signal zum Drehen des Manipulators
und dadurch der Last um die vertikale Achse gibt, werden die Hydraulikmotoren
der Rotatoreinrichtung betätigt,
und ein resultierender Durchfluss verursacht ein Drehmoment. Wenn
der Haken an Seilen hängt,
würde das
Drehmoment zu einer Torsionsschwingung des Manipulator und der Last
führen.
Zum Positionieren der Last bei einem spezifischen Winkel φ
L muss diese Torsionsschwingung kompensiert
werden.
-
Das
bekannte Steuerverfahren nutzt ein dynamisches Modell des Systems
basierend auf den Bewegungsgleichungen eines physikalischen Modells
des Krans, wobei die bekannte Antitorsionsschwingungssteuerung aus
einem Bahnplanungsmodul und einem Bahnnachverfolgungsmodul besteht.
Das Bahnplanungsmodul berechnet die Bahn der Variablen, die den
Zustand des Systems beschreiben, und erzeugt eine Referenzfunktion.
Die Bahnnachverfolgungssteuerung kann in Störunterdrückung, Regelung mit Hilfsstellgröße (so genannte
Feed Forward Control) und Regelung mit Zustandsrückführung (so genannte State Feed
back Control) unterteilt werden. Die von der Regeleinrichtung verwendeten
Parameter sind die Masse der Last und vor allem das Trägheitsmoment
der Last.
-
Die
Massenverteilung in der Last, z.B. einem Container, ist aber nicht
bekannt, und daher ist das Trägheitsmoment
der Last ebenfalls nicht bekannt. Daher muss das Trägheitsmoment
JL der Last geschätzt werden. Bei dem bekannten
Steuersystem erfolgt dies durch Annehmen einer homogenen Massenverteilung
in der Last und Berechnen eines geschätzten Trägheitsmoments JL der
Last allein aus der Masse des Containers und den bekannten Maßen des
Containers.
-
Die
Lastverteilung in einem Container ist aber meist alles andere als
homogen, so dass der geschätzte Wert
der Last JL nur eine sehr ungenaue Annäherung ist.
Da die Steuereinrichtung das Trägheitsmoment
JL der Last als Parameter zum Steuern der
Orientierung der Kranlast verwendet, führt die Differenz zwischen
dem wahren Wert des Trägheitsmoments
JL und der groben Schätzung zu einer Ungenauigkeit
bei der Steuerung der Orientierung der Last.
-
Das
Ziel der vorliegenden Erfindung besteht daher darin, ein Verfahren
zum Steuern der Orientierung der Kranlast an die Hand zu geben,
das eine bessere Genauigkeit aufweist.
-
Dieses
Ziel wird durch ein Verfahren zum Steuerung der Orientierung einer
Kranlast nach Anspruch 1 verwirklicht, wobei die Steuereinrichtung
zum Steuern des Drehwinkels φL der Last eine adaptive Steuereinrichtung
ist, wobei das Trägheitsmoment
JL der Last während des Kranbetriebs anhand
von Daten ermittelt wird, die durch Messen des Systemzustands erhalten
werden.
-
Dadurch
kann das Trägheitsmoment
JL der Last ermittelt werden, was zu einer
besseren Genauigkeit bei diesem wichtigen Parameter führt, der
von der Steuereinrichtung zum Steuern der Orientierung der Kranlast
genutzt wird. Die Steuereinrichtung wird während des Kranbetriebs durch
Verwenden eines korrigierten Werts des Trägheitsmoments JL,
der während
des Kranbetriebs anhand der durch Messen des Systemzustands erhaltenen
Daten bestimmt wird, als Parameter angepasst. Daher verwendet die
Steuereinrichtung keinen einmalig geschätzten Festwert, sondern einen
Wert, der mit Hilfe weiterer während
des Kranbetriebs gewonnener Informationen angepasst wird.
-
Bei
dem erfindungsgemäßen Verfahren
zum Steuern der Drehung des Krans wird der Drehwinkel φL der Last vorteilhafterweise mit Hilfe einer
adaptiven Bahnnachverfolgungssteuerung gesteuert. Dies erlaubt eine
wirksame Steuerung der Bewegungen der Kranlast. Zum Beispiel kann
eine Regelung mit Hilfsstellgröße zum Berechnen
der Bahnen der Systemvariablen anhand von Vorwärtsintegration der Bewegungsgleichungen des
Systems verwendet werden, und eine Regelung mit Zustandsrückführung kann
durch Messen des Systemzustands erhaltene Daten verwenden.
-
Bei
dem erfindungsgemäßen Verfahren
zum Steuern der Drehung einer Kranlast wird vorteilhafterweise ein
dynamisches Modell des Systems zum Berechnen von Daten verwendet,
die den Systemzustand beschreiben, d.h. der Bahnen der Systemvariablen.
Diese Daten können
dann die Grundlage zum Steuern der Drehung der Kranlast bilden,
wobei das dynamische Modell des Systems eine genaue Beschreibung
des Systems und daher eine präzise
Steuerung der Orientierung der Kranlast erlaubt.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast kann die Differenz φc zwischen dem Drehwinkel φL der Last und dem Drehwinkel φH des Hakens durch die Rotatoreinrichtung
verändert
werden. Dies erfolgt vorteilhafterweise durch Verwenden eines Hydraulikmotors
für die
Rotatoreinrichtung, so dass durch die Rotatoreinrichtung Drehmoment
angelegt werden kann. Das ermöglicht
ein Drehen des Manipulators und dadurch der Last um eine vertikale
Achse, wodurch eine Orientierung der Last in jeder erwünschten
Richtung ermöglicht
wird.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast werden Torsionsschwingungen durch
eine Antitorsionsschwingungseinrichtung unter Verwendung der von
dem dynamischen Modell errechneten Daten vermieden. Diese Antitorsionsschwingungseinrichtung nutzt
die von dem dynamischen Modell errechneten Daten, um die Rotatoreinrichtung
so zu steuern, dass Schwingungen der Last vermieden werden. Dadurch
kann die Antitorsionsschwingungseinrichtung Steuersignale erzeugen,
die von dem dynamischen Modell vorhergesagten möglichen Schwingungen der Last
entgegenwirken. Wird ein Hydraulikmotor für den Rotator verwendet, kann
die Antitorsionsschwingungseinrichtung Signale zum Betätigen des
Hydraulikmotors erzeugen, wodurch ein durch den resultierenden Durchfluss
erzeugtes Drehmoment angelegt wird.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast wird die Differenz φc zwischen dem Drehwinkel φL der Last und dem Drehwinkel φH des Hakens durch einen mit der Rotatoreinrichtung
verbundenen Messwertgeber gemessen. Dieser Messwertgeber ermöglicht das
exakte Messen der Differenz φc und trägt
dadurch dazu bei, die Orientierung der Last zu steuern.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast werden die Bewegungen eines durch
das Seil geführten
kardanischen Elements gemessen, um Daten zu erhalten, durch welche
der Drehwinkel φH des Hakens und/oder der Drehwinkel φL der Last ermittelt werden können. Das
kardanische Element ist bevorzugt durch eine kardanische Verbindung
mit dem Auslegerkopf des Krans verbunden und folgt den Bewegungen
des Seils, an dem es durch Rollen geführt ist. Durch Messen der Bewegungen
des kardanischen Elements können
die Bewegungen des Seils ermittelt werden. Da der Haken meist an
mehreren Seilen hängt,
werden bevorzugt mindestens zwei kardanische Elemente vorgesehen, um
die Bewegungen von mindestens zwei dieser Seile zu ermitteln. Der
Drehwinkel φH des an den Seilen hängenden Haken und/oder der
Drehwinkel φL der Last können dann aus den durch Messen
der Bewegungen der kardanischen Elemente erhaltenen Daten ermittelt
werden.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast wird ein Gyroskop verwendet, um
Daten zu erhalten, durch welche der Drehwinkel φH des
Hakens und/oder der Drehwinkel φL der Last ermittelt werden können. Die
Verwendung eines Gyroskops ist eine besonders effektive Möglichkeit,
diese Daten mit ausreichender Präzision
zu erhalten. Das Gyroskop kann an verschiedenen Stellen am Kran
angebracht werden. Wenn kardanische Elemente verwendet werden, kann das
Gyroskop an den kardanischen Elementen angebracht werden, um deren
Bewegungen zu messen, es ist aber auch möglich, das Gyroskop direkt
am Haken oder am Manipulator anzubringen.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast wird die Änderung φ .H des
Drehwinkels φH des Hakens und/oder die Änderung φ .l des Drehwinkels φL der
Last durch ein Gyroskop gemessen. Das Gyroskop kann entweder am
Haken oder am Manipulator angebracht werden, bevorzugt aber am Haken.
Gyroskope können
die Winkelgeschwindigkeiten φ .H und φ .l messen, was eine Ermittelung des Drehwinkels φH des Hakens und von φL ermöglicht.
Wenn φ .H von dem Gyroskop gemessen
wird, kann φH durch Integration ermittelt werden. Der
Drehwinkel φL der Last kann dann durch Verwenden der
Differenz φc zwischen dem Drehwinkel φL der Last und dem vom Messwertgeber gemessenen
Drehwinkel φH des Hakens berechnet werden. Da der von
dem Gyroskop gemessene Wert von φ .H Rauschen
und ein Offset enthält,
würde eine
direkte Integration zu einer Summierung dieser Fehler führen, was
zu schlechten Ergebnissen bei der Genauigkeit führen würde. Daher wird vorteilhafterweise
ein Störbeobachter
zum Ausgleichen des Offset verwendet. Dies erlaubt eine stabilere
Schätzung
des Drehwinkels φL aus der Winkelgeschwindigkeit φ .H .
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast beruht das dynamische Modell des
Systems auf den Bewegungsgleichungen eines physikalischen Modells
mindestens der Seile, des Hakens und der Last. Bei einem solchen
physikalischen Modell bilden der Haken und die Last, die an den
Seilen hängen,
ein Torsionspendel, dessen Bewegungsgleichungen mit Hilfe z.B. des
Lagrange-Formalismus ermittelt werden können. Dies ermöglicht eine
realistische Beschreibung des Systems und daher eine präzise Bahnplanung
und -steuerung.
-
Vorteilhafterweise
werden das Trägheitsmoment
JH des Hakens und JSp des
Manipulators als Parameter für
die Steuerung des Drehwinkels φL der Last verwendet. Auch wenn das Trägheitsmoment
JH des Hakens und JSp des
Manipulators meist kleiner als das Trägheitselement JL der
Last sind, tragen sie dennoch zum Drehverhalten des Systems bei
und sollten bei den Berechnungen und dem physikalischen Modell berücksichtigt
werden.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast wird während des Betriebs des Krans
an der Last und/oder dem Haken ein Drehmoment angelegt. Die durch
Messen des Systemzustands während
des Anlegens eines Drehmoments am Haken und/oder der Last erhaltenen
Daten erlauben die Schätzung
des Trägheitsmoments
JL der Last, z.B. durch Verwenden eines Beobachters.
-
Vorteilhafterweise
umfassen die durch Messen des Systemzustands erhaltenen Daten mindestens
die Änderung φ .H des Drehwinkels φH des
Hakens und/oder die Änderung φ .l des
Drehwinkels φL der Last als Reaktion auf das an der Last
und/oder dem Haken angelegten Drehmoment. Diese Daten können dann
zum Schätzen
des Trägheitsmoments
JL der Last verwendet werden, z.B. durch
Vergleichen der von dem dynamischen Modell errechneten Daten mit
den gemessenen Daten.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast wird ein Wert des Trägheitsmoments
JL0, der auf der Grundlage der Masse und
der Maße
der Last allein geschätzt
wird, als Ausgangswert für
JL verwendet, und korrigierte Werte JLk werden in einem iterativen Prozess ermittelt,
um das Trägheitsmoment
JL zu bestimmen. Dies ergibt anhand der
Daten, die schnell verfügbar
sind, eine grobe Schätzung
des Ausgangswerts für
JL,, während
bessere Schätzungen
während
des Kranbetriebs anhand der weiteren Daten ermittelt werden, die
durch Messen des Systemzustands erhalten werden.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast werden während des Kranbetriebs den
Systemzustand beschreibende Daten von dem dynamischen Modell basierend
auf einem Wert JL,k-1, des Trägheitsmoments
JL errechnet, und ein korrigierter Wert
JLk des Trägheitsmoments JL wird
anhand der errechneten Daten und der durch Messen des Systemzustands
erhaltenen Daten ermittelt, um das Trägheitsmoment JL zu
bestimmen. Dies erlaubt eine weitaus bessere Schätzung des Trägheitsmoments
JL als die Verwendung der Masse und der
Maße der
Last allein.
-
Das
Trägheitsmoment
JL kann vorteilhafterweise mit Hilfe eines
Beobachters bestimmt werden. Dieses Verfahren zur Schätzung des
Trägheitsmoments
JL nutzt durch das dynamische Modell errechnete
Daten und kombiniert diese mit Daten, die durch Messen des Systemzustands
erhalten wurden, um den Parameter JL des dynamischen
Modells zu schätzen.
Das Verwenden eines Beobachters zum Ermitteln von Variablen des
Systems wie zum Beispiel des Drehwinkels φH des
Hakens aus der von dem Gyroskop gemessenen Winkelgeschwindigkeit φ .H war bereits bekannt. Hier wird aber
ein Parameter des Modells mit Hilfe eines Beobachters ermittelt,
was zu einer adaptiven Steuerung führt.
-
Wenn
ein Parameter des Modells von dem Beobachter geschätzt wird,
wird das Problem nichtlinear, so dass das Trägheitsmoment JL vorteilhafterweise
mit Hilfe eines nichtlinearen Beobachters bestimmt wird. Es gibt
verschiedene Möglichkeiten
zum Implementieren eines nichtlinearen Beobachters, insbesondere
bei zeitvarianten Modellen, zum Beispiel einen High-Gain-Ansatz
oder das erweiterte Kaiman-Filter.
-
Die
letzte Möglichkeit
bietet ein sehr stabiles System zum schnellen Schätzen von
Parametern des Systems, so dass das Trägheitsmoment JL vorteilhafterweise
mit Hilfe eines erweiterten Kaiman-Filters bestimmt werden kann.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast wird für die Schätzung eines Ausgangswerts JL0 des Trägheitsmoments
JL der Last eine homogene Verteilung von
Masse in der Last angenommen. Dies erlaubt eine schnelle Berechnung,
die nur die Masse und die Maße
der Last als Eingabe benötigt.
-
Bei
einer Weiterentwicklung des erfindungsgemäßen Verfahrens zum Steuern
der Orientierung einer Kranlast wird Rauschen in den durch Messungen
erhaltenen Daten bei der Bestimmung des Trägheitsmoments JL berücksichtigt.
Dies führt
zu mehr Präzision
bei der Schätzung
des Trägheitsmoments
JL, die auf den gemessenen Daten beruht
und daher durch Rauschen in den Messungen beeinflusst wird.
-
Vorteilhafterweise
wird das Rauschen in den durch Messungen erhaltenen Daten durch
Kovarianzmatrizen modelliert. Dies erlaubt eine quantitative Beschreibung
des Einflusses des Rauschens und kann die sich aus dem Rauschen
ergebenden Fehler minimieren.
-
Diese
Kovarianzmatrizen werden vorteilhafterweise experimentell ermittelt.
Durch Testen des Steuersystems mit verschiedenen Werten für die Kovarianzmatrizen
können
die besten Werte für
eine schnelle und stabile Schätzung
des Trägheitsmoments
JL ermittelt und für den Beobachter verwendet
werden.
-
Die
vorliegende Erfindung umfasst weiterhin ein System zum Steuern der
Orientierung einer Kranlast mit Hilfe eines der oben beschriebenen
Verfahren. Ein solches Steuersystem umfasst eine Steuereinrichtung zum
Steuern des Drehwinkels φL der Last. Vorteilhafterweise enthält die Steuereinrichtung
eine Bahnplanungseinrichtung und eine Bahnsteuerungseinrichtung
sowie einen Beobachter zum Schätzen
des Trägheitsmoments
JL.
-
Die
vorliegende Erfindung umfasst weiterhin einen Kran, insbesondere
einen Auslegerkran, der ein System zum Steuern der Drehung einer
Kranlast mit Hilfe eines der vorstehend beschriebenen Verfahren
umfasst. Ein solcher Kran umfasst einen an Seilen hängenden
Haken, eine Rotatoreinrichtung und einen Manipulator. Vorteilhafterweise
umfasst der Kran auch ein Anti-Pendel-Steuersystem, das mit dem
System zum Steuern der Drehung eines Krans zusammenwirkt. Wenn der
Kran ein Auslegerkran ist, umfasst er einen Ausleger, der um eine
horizontale Achse auf und ab geschwenkt und durch einen Turm um
eine vertikale Achse gedreht werden kann. Ferner kann die Länge des
Seils verändert
werden.
-
Nun
wird die vorliegende Erfindung anhand der folgenden Zeichnungen
näher beschrieben.
Darin zeigen
-
1a eine
Seitenansicht und eine Draufsicht eines Hafenmobilkrans,
-
1b eine
Seitenansicht eines Auslegerkopfes des Hafenmobilkrans mit einem
kardanischen Element,
-
2 den
Steueraufbau des Hafenmobilkrans,
-
3 den
Aufbau der Antitorsionsschwingungssteuerung,
-
4 eine
an einem Seil hängende
Rotatoreinrichtung mit Manipulator und Last,
-
5 den
Aufbau eines Simulationsumfelds,
-
6 die
Ermittlungsleistung des erweiterten Kalman-Filters abhängig von
der Wahrscheinlichkeitsmatrix P0,
-
7 die
Bestimmung von JL mit falschem Ausgangswert,
-
8 die
Bestimmung von JL mit richtigem Ausgangswert.
-
Auslegerkrane
werden häufig
zum Abwickeln von Frachtumschlagvorgängen in Häfen eingesetzt. Ein solcher
Hafenmobilkran wird in 1a gezeigt. Der Kran weist eine
Lastkapazität
von bis zu 140 t und eine Seillänge
von bis zu 80 m auf. Er umfasst einen Ausleger 1, der um
eine horizontale Achse auf und ab geschwenkt werden kann, die durch
die Gelenkachse 2 gebildet wird, mit der er an einem Turm 3 angebracht
ist. Der Turm 3 kann um eine vertikale Achse gedreht werden,
wodurch auch der Ausleger 3 mit diesem gedreht wird. Der
Turm 3 ist an einem an Rädern 7 angebrachten
Unterwagen 6 befestigt. Die Länge des Seils 8 kann durch
Winden verändert
werden. Die Last 10 kann von einem Manipulator oder Spreader 20 aufgenommen werden,
der durch eine Rotatoreinrichtung 15 gedreht werden kann,
die in einem an dem Seil 8 hängenden Haken angebracht ist.
Die Last 10 wird entweder durch Drehen des Turms und dadurch
des ganzen Krans oder durch Verwenden der Rotatoreinrichtung 15 gedreht.
In der Praxis müssen
beide Drehungen gleichzeitig genutzt werden, um die Last in einer
erwünschten
Position auszurichten.
-
Der
Einfachheit halber wird hier nur die Drehung einer Last, die an
einem ansonsten unbeweglichen Kran hängt, erläutert. Das erfindungsgemäße Steuerkonzept
kann aber problemlos in ein Steuerkonzept für den gesamten Kran integriert
werden.
-
Insbesondere
für Containerumschlag
wurde die aus
DE 100 64 182 und
DE 103 24 692 bereits bekannte
Antipendelsteuerung um ein Steuer- und Automatisierungskonzept für die Containerorientierung
basierend auf dem dynamischen Modell des Systems erweitert, um eine
unerwünschte
Schwingung der Last zu verhindern. Dieses Steuerkonzept für die Containerorientierung
wird in
DE 100 29 579 offenbart,
wo das Trägheitsmoment
der Kranlast basierend auf der Annahme geschätzt wird, dass die Massenverteilung
im Container homogen ist.
-
Da
das Spreader/Rotator-System als Roboter mit flexiblem Arm mit einem
langsamen dynamischen Verhalten betrachtet werden kann, wird ein
adaptives und modellbasiertes Verfahren zur Steuerung des Manipulators
eingesetzt. Um die Leistung dieses Steuerkonzepts zu verbessern,
müssen
die Parameter des dynamischen Modells des Systems und insbesondere
das Trägheitsmoment
der Last so genau wie möglich
bekannt sein. Die vorliegende Erfindung offenbart ein Bestimmungsverfahren
zum Verbessern dieser Steuer- und Automatisierungskonzepte eines
Hafenmobilkrans, die in
DE 100
64 182 ,
DE 103 24 692 und
DE 100 29 579 sowie in
O.
Sawodny, H. Aschemann, J. Kümpel,
C. Tarin, K. Schneider, Anti-Sway Control for Boom Cares, American
Control Conference, Anchorage USA, Proc. Seiten 244-249, 2002; O.
Sawodny, A. Hildebrandt, K. Schneider, Control Design for the Rotation
of Crane Loads for Boom Cranes, International Conference on Robotics & Automation, Taipei
Taiwan, Proc. Seiten 2182-2187, 2003 und
J. Neupert,
A. Hildebrandt, O. Sawodny, K. Schneider, A Trajectory Planning
Strategy for Large Serving Robots, SICE Annual Conference, Okayama Japan,
Proc. Seiten 2180-2185, 2005, beschrieben werden.
-
Aufgrund
der ungewöhnlich
inhomogenen Verteilung der Last in dem Container ist das anhand
der Annahme, dass die Verteilung von Last homogen ist, geschätzte Trägheitsmoment
nur eine sehr grobe Annäherung
an diesen Parameter, was zu einer ungenauen Steuerung der Orientierung
des Containers führt.
Daher offenbart die vorliegende Erfindung ein Verfahren zum Bestimmen
des Trägheitsmoments
der Last während des
Kranbetriebs beruhend auf durch Messen des Systems erhaltenen Daten.
Diese Art des Schätzens
des Trägheitsmoments
der Last mit Hilfe eines Beobachteransatzes führt zu einer besseren Genauigkeit
des Steuerverfahrens.
-
Die
Daten, auf denen die Ermittlung des Trägheitsmoments der Last beruht,
können
durch verschiedene Verfahren erhalten werden. 1b zeigt
ein kardanisches Element 35, das an dem Auslegerkopf 30 eines
Auslegers 1 durch kardanische Verbindungen 32 und 33 unter
der Hauptrolle 31 angebracht ist. Das kardanische Element 35 weist
Rollen 36 auf, durch die es an dem Seil 8 geführt wird,
so dass es den Bewegungen des Seils 8 folgt. Die kardanischen
Verbindungen 32 und 33 erlauben dem kardanischen
Element 35, sich frei um eine horizontale und eine vertikale
Achse zu bewegen, unterbinden aber Drehbewegungen. Die Bewegungen
des kardanischen Elements und somit die Bewegungen des Seils können gemessen
werden. In dieser Ausführung
werden zwei kardanische Elemente 35 vorgesehen, die an
den zwei Seilen geführt
sind, an denen der Haken hängt.
Diese Daten können dann
zum Berechnen der Torsinn der Seile und des Winkels φH der Torsinn des Hakens verwendet werden.
Für diesen
Zweck kann ein Gyroskop an den kardanischen Elementen angebracht
werden. Werden keine kardanischen Elemente verwendet, kann ein Gyroskop
auch direkt an dem Haken oder dem Manipulator angebracht werden,
um deren Drehwinkel zu ermitteln.
-
In
der vorliegenden Erfindung können
verschiedene Beobachterverfahren zum Bestimmen des Trägheitsmoments
der Last während
des Kranbetriebs anhand von durch Messen des Systems erhaltenen
Daten verwendet werden.
-
Durch
Anwenden der Methode der kleinsten Quadrate bei den gemessenen Eingabe-/Ausgabedaten können Systemparameter
geschätzt
werden. Die Standardmethode der kleinsten Quadrate ist aber beim Schätzen von
sich zeitlich ändernden
Parametern unbefriedigend. Zur Lösung
dieses Problems kann ein exponentielles Vergessen der älteren Daten
verwendet werden. Der so genannte Forgetting Faktor kann so gewählt werden,
dass die resultierende Gain-Matrix eine konstante Spur hält. Dieser
Ansatz kann weiter zu dem Gain-angepassen Verfahren des Vergessens
entwickelt werden, bei dem der Forgetting-Faktor entsprechend der
Norm der Gain-Matrix ständig
verändert
wird.
-
Ein
anderes Verfahren zur Bestimmung der Parameter von dynamischen Systemen
ist das erweiterte Kalman-Filter, das in der erfindungsgemäßen Ausführung verwendet
wird. Bei der Verwendung dieses Verfahrens gibt es mehrere Vorteile,
auf die später
eingegangen wird.
-
2 zeigt
ein bekanntes adaptives Steuerkonzept zum Handhaben der Orientierung
der Last (des Containers). Dieses in (
O. Sawodny, A. Hildebrandt,
K. Schneider, Control Design for the Rotation of Crane Loads for
Boom Cranes, International Conference on Robotics & Automation, Taipei
Taiwan, Proc. Seiten 2182-2187, 2003) vorgestellte und
auch in
DE 100 29 579 offenbarte
Steuerkonzept, deren Inhalt durch Erwähnung in diese Anmeldung aufgenommen
wird, besteht aus einer Bahnnachverfolgungssteuerung, einem Störbeobachter
und einer Regelung mit Zustandsrückführung, um
Torsionsschwingungen zu unterbinden. Zur Steuerung der Lastorientierung
wird der Torsionswinkel aus der Winkelgeschwindigkeit rekonstruiert,
die durch ein Gyroskop im Haken gemessen wird. Der Winkel zwischen
dem Haken und dem Container wird durch einen Messwertgeber gemessen.
Die Lastorientierung wird durch Summieren beider Winkel erhalten.
Aufgrund der Tatsache, dass alle Teile des Steuerkonzepts modellbasierte
Algorithmen sind, müssen
sie an Parameteränderungen
angepasst werden. Die meisten Parameter können direkt gemessen werden,
doch ist die Verteilung der Lastmasse im Container und somit das
Trägheitsmoment
des Containers unbekannt.
-
Da
dieser Parameter einen großen
Einfluss auf das dynamische Verhalten des Torsionsoszillators und somit
auf die Leistung der Antischwingungssteuerung hat, muss er on-line
bestimmt werden.
-
Dynamisches Modell für den am
Seil hängenden
Manipulator
-
Zum
Umschlagen der Container ist der Auslegerkran mit einem speziellen
Manipulator, dem so genannten Spreader, ausgerüstet. Der Manipulator kann
durch eine einen Hydraulikantrieb enthaltende Rotatoreinrichtung
um die vertikale Achse gedreht werden. Wie in 4 gezeigt
wird, ist diese Einrichtung im Haken installiert.
-
Der
Haken ist an zwei Seilen befestigt, wobei r und lS den
effektive Abstand der beiden parallelen Seile bzw. die Seillänge angeben.
Das System besteht aus drei erweiterten Körpern. Der Last (Container),
gekennzeichnet durch das Trägheitsmoment
JL, und der Masse mL,
dem Manipulator (Container-Spreader) und dem Haken. JSp und
JH geben das Trägheitsmoment des Spreader und
des Hakens an, mSp und mH geben
jeweils die Masse der beiden Körper
an. Der Drehwinkel des Spreader mit Last wird als φL bezeichnet. Der zweite Winkel φH gibt den Torsionswinkel an.
-
Zum
Ableiten der Bewegungsgleichungen des betrachteten mechanischen
Systems wird die Lagrange-Formulierung verwendet (nach L.
Sciavicco, B. Siciliano, Modelling and Control of Robot Manipulators, Springer-Verlag
London, Großbritannien,
2001).
-
-
Die
Lagrange-Funktion L ist als Differenz zwischen der kinetischen Energie
T und der potentiellen Energie U des Systems definiert. L = T – U (2)
-
Unter
der Annahme, dass Haken, Spreader und Last (Container) zu einem
erweiterten Körper
mit dem Gesamtträgheitsmoment
J
total = J
H + J
Sp + J
L zusammengefasst
werden, werden die kinetische und potentielle Energie wie folgt
erhalten:
-
c
T beschreibt die linearisierte Torsionssteifheit
der beiden parallelen Seile als Funktion der Parameter M
total = m
H + m
Sp + m
L und l
S, (- ist die Gravitationskonstante):
-
Das
Lösen der
Gleichung (1) mit der resultierenden Lagrange-Funktion und der generalisierten
Koordinate q = φH führt
zu dem dynamischen Modell der Rotatoreinrichtung mit Last. Jtotalφ ..H +
clφH = ζ (5)
-
Die
generalisierte Kraft ist das Moment des Hydraulikmotors und kann
definiert werden als ζ = –(JSp + Jl)φ ..( (6) wobei φ ..( die relative Winkelbeschleunigung zwischen
dem Haken und dem Spreader ist (φ ..( = φ ..l – φ .H).
-
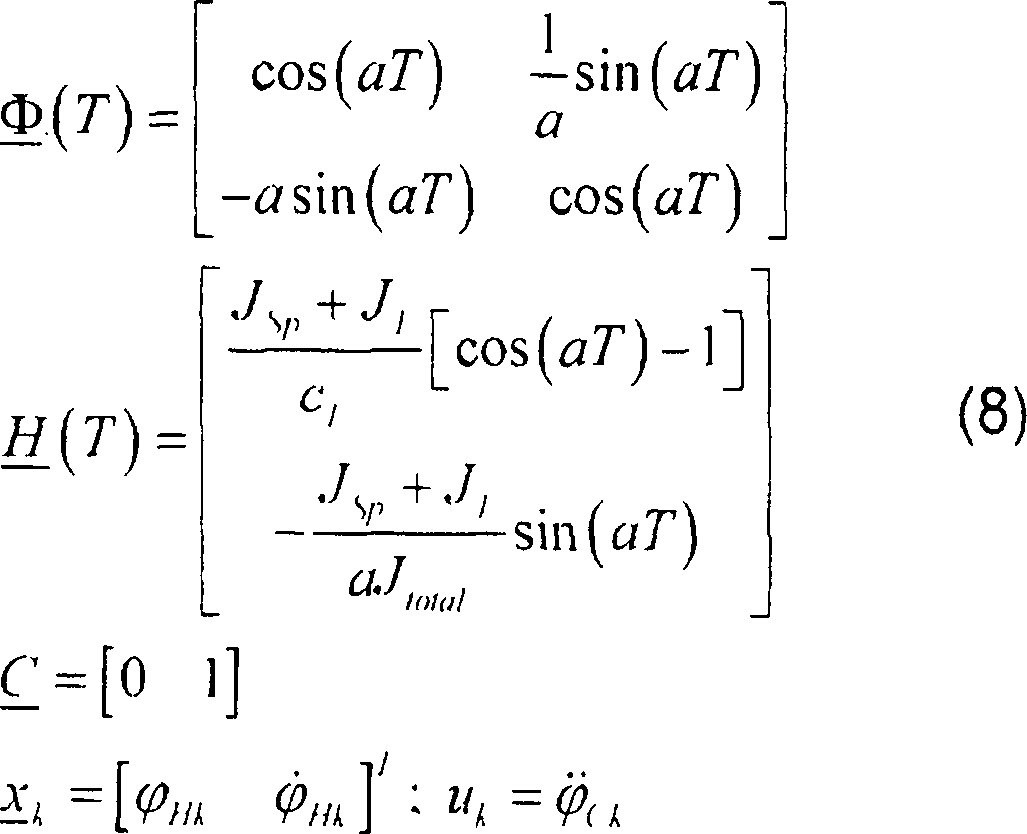
Für das Bestimmungsverfahren
wird das stetige Modell (Gleichungen (5) und (6)) in ein Raummodell diskreten
Zustands mit folgender Form umgewandelt: x h+1 = Φx h + Hu h
y h = Cx h (7)
-
Die
Systemmatrizen, der Zustandsvektor und der Eingabevektor werden
erhalten:
wobei
und die Abtastzeit T.
-
Bestimmung des unsicheren Parameters
-
Für den vorgegebenen
Anwendungsfall muss das Trägheitsmoment
des Containers während
des Kranbetriebs ermittelt werden, um das modellbasierte Steuerkonzept
anzupassen. Aufgrund dieser Tatsache muss der Bestimmungsalgorithmus
für das
Trägheitsmoment
iterativ sein, so dass jedes Mal, da eine exakte Messung von Eingabe-/Ausgabedaten
erhalten wird, eine neue Parameterschätzung erzeugt wird.
-
In
der Vergangenheit wurden etliche Systembestimmungsverfahren diskutiert.
Eines der Verfahren für die
Online-Parameterbestimmung ist das erweiterte Kalman-Filter.
-
Zum
Schätzen
des unbekannten Trägheitsmoments
des Containers wird der Zustandsvektor des diskreten Zustandsraummodells
(Gleichungen (7) und (8)) um den unbekannten Parameter JL erweitert (C.K. Chui, G. Chen,
Kalman Filtering with Real-Time Application, Springer-Verlag Berlin
Heidelberg, Deutschland, 3. Auflage, 1999).
-
-
Mit
dieser Erweiterung ergibt sich ein nichtlineares diskretes Modell
folgender Form:
wobei v
k eine
Sequenz weißen
Gaußschen
Rauschens mit null Mittelwert ist, um das reale System präziser zu beschreiben.
Das Systemrauschen wird durch die folgende Kovarianzmatrix charakterisiert
-
Die
vektorbewerteten Funktionen
f und
g werden erhalten durch:
-
Wie
in Abschnitt 1 erläutert
kann der Drehwinkel des Haken φ
H nicht direkt gemessen werden. Er muss aus
der Winkelgeschwindigkeit
rekonstruiert
werden, die durch ein Gyroskop im Haken gemessen wird. Da das Gyroskopsignal gestört ist,
muss das Messrauschen berücksichtigt
werden, was zu einer Systemausgabe führt, die modelliert werden
kann als:
und w
k ein
weißes
Gaußsches
Rauschen mit null Mittelwert mit der folgenden Kovarianzmatrix ist
-
Um
das Kalman-Filter an dem erhaltenen nichtlinearen System anzulegen,
muss es mit Hilfe einer linearen Taylor-Annäherung an die Schätzung des
vorherigen Zustands
linearisiert
werden:
wobei
F die Jacobische Matrix von
f mit den folgenden Koeffizienten ist:
-
Durch
Berechnen der Koeffizienten für
i, j = 1, ..., 3 wird die Jacobische Matrix erhalten als:
-
Mit
dem linearisierten Modell und den Kovarianzmatrizen Q und R kann
der optimale Kaiman-Filter-Algorithmus in folgender Form abgeleitet
werden (T. Iwasaki, T. Kataoka, Application Of An Extended
Kalman Filter To Parameter Identification Of An Induction Motor,
Industry Applications Society Annual Meeting, Bd. 1, Seiten 248-253, 1989):
-
1.
Schritt: Die Vorhersage der Zustände
[φHh φ .Hh] und des
Parameters J
Lk wird aus der Eingabe u
k und den geschätzten nicht gestörten Zuständen
berechnet.
-
-
2.
Schritt: Die Kovarianzmatrizen des Vorhersagefehlers
M k+1 und der Schätzungsfehler
P k+1 sowie
die Kalman-Gain-Matrix
K k+1 werden mit Hilfe von Folgendem berechnet
(
I ist die Identitätsmatrix):
-
3.
Schritt: Die Schätzung
des Zustandsvektors und des Trägheitsmoments
des Containers werden durch Korrigieren der vorhergesagten Werte
mit der gewichteten Differenz zwischen der gemessenen und der vorhergesagten
Winkelgeschwindigkeit des Hakens erhalten.
-
-
Der
beschriebene Algorithmus wird jedes Mal, wenn eine neue Messung
von Eingabe-/Ausgabedaten verfügbar
ist (k = 1, 2, ...), ausgeführt.
Zum Initialisieren des erweiterten Kalman-Filters wird in dem Moment, da
ein Container aufgenommen wird, ein Startimpuls erzeugt. Die von
dem Störbeobachter
beobachteten Zustände
[φH φ .H] sind in
diesem Moment die Anfangsschätzung
für den Filteralgorithmus.
Der Ausgangswert für
das Trägheitsmoment
des Containers
kann
durch Annehmen, dass der Container gleichmäßig verteilte Masse hat erhalten
werden. Da die Länge
l
container und die Masse m
L des
Containers gemessen werden können und
die Breite konstant ist (b
container = 2,4m),
kann das Trägheitsmoment
wie folgt berechnet werden:
-
Die
Ausgangskovarianzmatrix für
den Schätzungsfehler P 0 wird
zum Abstimmen des Bestimmungsalgorithmus verwendet (siehe Abschnitt
4).
-
Ergebnisse
-
Simulation
-
Um
gute Elemente der Kovarianzmatrix für den Schätzungsfehler
P 0 zu finden, wird
der Bestimmungsalgorithmus in einem simulierten Umfeld implementiert.
Wie in
5 gezeigt wird, wird das Simulationsmodell durch
das Messsignal
aus
dem realen System beendet. Ferner wird Rauschens zum Ausgangssignal
des Simulationsmodells addiert.
-
Die
Parameter und die Ausgangsbedingungen der Simulation sind wie folgt:
-
Die
in 6 gezeigten Simulationsergebnisse werden durch
Verwenden dieser Konfiguration erhalten. Die drei Kurven stellten
die durch Verwenden von drei verschiedenen Ausgangswerten für die Kovarianzmatrix
des Schätzungsfehlers
erhaltenen Ergebnisse dar. Je höher
die Werte dieser Matrix sind, desto schneller erreicht das geschätzte Trägheitsmoment
des Containers den Bezugswert JLmodel.
-
Die
Ergebnisse zeigen, dass selbst bei Simulation ein oberer Grenzwert
für den
Ausgangswert der Kovarianzmatrix des Schätzungsfehlers vorliegt, wenn
das Simulationsmodell durch das Messsignal
beendet
wird. Dies bedeutet, dass der Bestimmungsalgorithmus stark auf nicht
berücksichtigte
Störungen
der Systemeingabe anspricht, wenn die Ausgangskovarianzmatrix
(δ
iJ ist
das Kronecker-Delta) oder größer ist.
-
Experimentelle Untersuchungen
-
Um
die Leistung des erweiterten Kalman-Filters zu beurteilen, wird
der Algorithmus in dem Steuer- und Automatisierungskonzept des Auslegerkrans,
insbesondere in dem adaptiven Antitorsionsschwingungssteuerteil,
implementiert, wie in
3 dargelegt wird. Die erhaltenen
experimentellen Ergebnisse werden online durch den Algorithmus für das erweiterte
Kalman-Filter während
des Kranbetriebs berechnet. Die Experimente zeigen, dass der beste
Ausgangswert der Kovarianzmatrix
ist. Dieser ist aufgrund
von Modellunsicherheiten und nicht berücksichtigte Störungen der
Eingabe-/Ausgabesignale viel kleiner als in der Simulation.
7 zeigt
aber, dass sich die Schätzung
des Trägheitsmoments
der Last dem Bezugswert von 36.000kgm
2 nähert.
-
Der
Ausgangswert für
das Trägheitsmoment
wurde
mit 47.000kgm
2 gewählt, und die verbleibenden Parameter
und Ausgangsbedingungen waren gleich der Simulationskonfiguration.
Da die Erregung der Torsionsbewegung bei 150 Sekunden angehalten
wurde, besteht zwischen dem geschätzten J
L und
dem Bezugswert eine Restabweichung. Unter Berücksichtigung des langsamen
dynamischen Verhaltens des flexiblen Systems nähert sich das geschätzte Trägheitsmoment
schnell den Werten in dem Toleranzbereich um den Bezugswert. Eine
Abweichung von ±5%
zwischen
und
dem Bezugswert des Trägheitsmoments
hat keine große Wirkung
auf die Leistung der Antitorsionsschwingungssteuerung.
8 zeigt
das geschätzte
Trägheitsmoment
der Last, wenn der Ausgangswert
gleich
dem Bezugswert ist. In diesem Fall ist die Masse des Containers
gleichmäßig verteilt
(siehe Gleichung (24)).
-
Das
erhaltene Bestimmungsergebnis des Parameters JL zeigt
die Robustheit des Algorithmus des erweiterten Kalman-Filters, da
außerhalb
des Toleranzbereichs von ±5%
keine Schätzungen
berechnet werden. Die kleinen Abweichungen zwischen dem geschätzten Parameter
und dem Bezugswert sind durch Modellunsicherheiten verursacht.
-
Schlussfolgerung
-
Die
vorliegende Erfindung offenbart eine Ausweitung eines Steuer- und
Automatisierungskonzepts für die
Orientierung einer Kranlast. Da dieses Konzept ein adaptiver modellbasierender
Algorithmus ist, müssen die
Parameter des dynamischen Modells so präzis wie möglich bekannt sein. Die meisten
Parameter können direkt
gemessen werden, aber das Trägheitsmoment
der Kranlast (Container) muss aufgrund der unbekannten Verteilung
der Masse während
des Kranbetriebs bestimmt werden. Das verwendete Bestimmungsverfahren, der
erweiterte Kalman-Filter-Algorithmus, wird anhand des dynamischen
Modells des an dem Seil hängenden Manipulators
abgeleitet. Dieses Parameterbestimmungsverfahren wird in die Antitorsionsschwingungssteuerung
integriert und wurde an einem LIEBHERR LHM 402 Hafenmobilkran gestestet.
Die erhaltenen Messergebnisse zeigen die schnelle Annäherung und
die Robustheit der Schätzung
des unbekannten Trägheitsmoments
der Kranlast.



 und die Abtastzeit T.
und die Abtastzeit T.




 und wk ein weißes Gaußsches Rauschen mit null Mittelwert mit der folgenden Kovarianzmatrix ist
und wk ein weißes Gaußsches Rauschen mit null Mittelwert mit der folgenden Kovarianzmatrix ist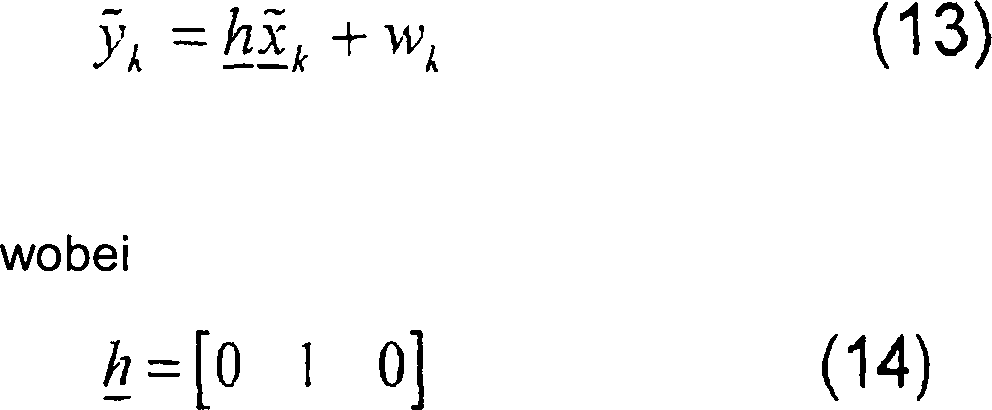

 wobei F die Jacobische Matrix von f mit den folgenden Koeffizienten ist:
wobei F die Jacobische Matrix von f mit den folgenden Koeffizienten ist:






 kann durch Annehmen, dass der Container gleichmäßig verteilte Masse hat erhalten werden. Da die Länge lcontainer und die Masse mL des Containers gemessen werden können und die Breite konstant ist (bcontainer = 2,4m), kann das Trägheitsmoment wie folgt berechnet werden:
kann durch Annehmen, dass der Container gleichmäßig verteilte Masse hat erhalten werden. Da die Länge lcontainer und die Masse mL des Containers gemessen werden können und die Breite konstant ist (bcontainer = 2,4m), kann das Trägheitsmoment wie folgt berechnet werden:



 (δiJ ist das Kronecker-Delta) oder größer ist.
(δiJ ist das Kronecker-Delta) oder größer ist.

 und dem Bezugswert des Trägheitsmoments hat keine große Wirkung auf die Leistung der Antitorsionsschwingungssteuerung.
und dem Bezugswert des Trägheitsmoments hat keine große Wirkung auf die Leistung der Antitorsionsschwingungssteuerung.
