-
Gebiet der
Erfindung
-
Diese
Erfindung betrifft einen Motor/Generator mit zwei Rotoren und einem
einzelnen Stator.
-
Hintergrund der Erfindung
-
Tokkai-Hei-11-275856,
1999 vom Japanischen Patentamt veröffentlicht, offenbart einen
synchronen Motor/Generator mit zwei Rotoren und einem einzelnen
Stator. Tokai-Hei-11-275856 ist eine Veröffentlichung vor Prüfung der
japanischen Patentanmeldung Tokugan-Hei-10-77449, die Basis des US-Patentes 6,049,152,
welches nach dem Prioritätsdatum
dieser Patentanmeldung erteilt wurde.
-
Ein
synchroner Motor/Generator bewegt entsprechende Rotoren koaxial überlagert
in einer radialen Richtung auf den äußeren und inneren Seiten eines
Stators. Obwohl die Anzahl der Magnetpole der zwei Rotoren unterschiedlich
ist, erzeugt der Stator drehende, magnetische Felder unter Verwendung
eines Typs von Ständerwicklungen.
Die drehenden Magnetfelder bestehen aus einem drehenden Magnetfeld,
welches die Drehung des Innenrotors synchronisiert, und einem drehenden
Magnetfeld, welches die Drehung des Außenrotors synchronisiert. Die
inneren und äußeren Rotoren
werden unabhängig
voneinander angetrieben durch Anlegen eines Verbundstroms an den
einzelnen Typ der Ständerwicklung.
Der Verbundstrom umfasst einen Wechselstrom, welcher das drehende
Magnetfeld für
den Innenrotor erzeugt, und den Wechselstrom, welcher das drehende
Magnetfeld für
den Außenrotor
erzeugt. Der Stator umfasst Plattenelemente, die in einer axialen
Richtung geschichtet sind, und ist mit einer Vielzahl von Ständerwicklungen versehen,
die sich in einer radialen Richtung erstrecken, damit Draht um diese
gewickelt werden kann. Wenn der Motor/Generator montiert wird, werden
die Plattenelemente geschichtet, und der Draht wird um jede Ständerwicklung
gewickelt.
-
EP 0 945 965 offenbart einen
Motor/Generator mit einem zweipoligen Innenrotor, einem 6-poligen
Außenrotor
und einem ringförmigen
Stator, der zwischen dem inneren und äußeren Rotor angeordnet ist.
Der Stator ist mit einer Vielzahl von Ständerwicklungen und einer Vielzahl
von Drähten,
die um die Ständerwicklungen
gewickelt sind, ausgestattet, wobei die Ständerwicklungen simultan ein
Magnetfeld, das mit der Drehung des Innenrotors synchronisiert ist,
und ein Magnetfeld, das mit der Drehung des Außenrotors synchronisiert ist,
erzeugen. Der einzelne Spulenkern besteht aus einem magnetischen
Material mit Verbindungen, die den einzelnen Spulenkern mit den
angrenzenden Spulenkernen verbindet. Der magnetische Widerstand
in der Umfangsrichtung eines inneren Umfangsabschnitts der Spulenkerne zwischen
dem Innenrotor und dem Ständerwicklungen
ist festgelegt. Da die Außenteile
der Spulenkerne hervorstehende Pole bilden, ist der magnetische
Widerstand in einer Umfangsrichtung eines äußeren Umfangsabschnitts der
Spulenkerne zwischen dem Außenrotor
und den Ständerwicklungen
ebenfalls festgelegt.
-
Die
JP 03169235 A offenbart
eine Verbesserung der mechanischen Festigkeit eines Zahnelement-Eisenkerns,
wobei die Zähne
gestapelt sind, durch Gleiten der Verbindungszähne des Zahneisenkerns um festgelegte
Winkel und Platzieren derselben in jeder Schicht.
-
Zusammenfassung
der Erfindung
-
In
diesem Motor/Generator wird das Austreten von magnetischem Fluss,
welcher den Innenrotor antreibt, durch den magnetischen Widerstand
zwischen inneren Umfangsabschnitten der Spulenkerne, die zwischen
dem Innenrotor und der Ständerwicklung
liegen, definiert (nachfolgend "innerer,
magnetischer Widerstand" genannt).
-
Das
Austreten von magnetischem Fluss, welcher den Außenrotor antreibt, wird durch
den magnetischen Widerstand zwischen den äußeren Umfangsabschnitten der
Spulenkerne, die zwischen den Außenrotor und der Ständerwicklungen
liegen, definiert (nachfolgend "äußerer magnetischer
Widerstand").
-
Die
Kennlinien der Bewegung des Motor/Generators verändern sich auf der Grundlage
des Verhältnisses
des inneren, magnetischen Widerstands und des äußeren, magnetischen Widerstands
(nachfolgend als "magnetisches
Widerstandsverhältnis" bezeichnet). Zum
Beispiel ändert
sich eine Leistungsdichte, das Leistungsverhältnis des Innenrotors und des
Außenrotors
oder das Verhältnis
der Lastfaktoren der Leistungsquelle des Innenrotors und des Außenrotors
auf der Grundlage des magnetischen Widerstandsverhältnisses.
Deshalb ist ein gewünschtes,
magnetisches Widerstandsverhältnis
unterschiedlich, abhängig
von den erforderlichen Kennlinien des Motor/Generators.
-
Um
jedoch das magnetische Widerstandsverhältnis zu ändern, muss der Aufbau des
Stators verändert
werden, so dass eine Änderung
des magnetischen Widerstandsverhältnisses
während
des Herstellvorgangs des Motor/Generators schwierig ist.
-
Es
ist deshalb eine Aufgabe dieser Erfindung, es zu ermöglichen,
dass das magnetische Widerstandsverhältnis des Stators in einer
willkürlichen Weise
während
des Herstellvorgangs des Motor/Generators eingestellt wird.
-
Um
die obige Aufgabe zu lösen,
stellt diese Erfindung einen Motor/Generator zur Verfügung, welcher
umfasst: eine Drehwelle; einen Innenrotor, der eine Vielzahl von
magnetischen Polen aufweist und koaxial zur Drehwelle angeordnet
ist; einen Außenrotor
mit einer Vielzahl von magnetischen Polen, welche von der Anzahl
der magnetischen Pole des Innenrotors verschieden ist, wobei der
Außenrotor
koaxial zur Drehwelle angeordnet ist, und einen ringförmigen Stator,
der koaxial zur Drehwelle zwischen dem Innenrotor und dem Außenrotor
angeordnet ist, wobei der Stator mit einer Vielzahl von Ständerwicklungen
ausgestattet ist, wobei die Ständerwicklungen gleichzeitig
ein mit der Drehung des Innenrotors synchronisiertes, magnetisches
Feld und ein mit der Drehung des Außenrotors synchronisiertes,
magnetisches Feld erzeugen, und mit einer Vielzahl von Spulenkernen
ausgestattet ist, um welche die Ständerwicklungen gewickelt sind,
wobei jeder Spulenkern eine einzelne Ständerwicklung trägt, angeordnet
in einer Umfangsrichtung und bestehend aus einem magnetischen Material,
dadurch gekennzeichnet, dass jeder Spulenkern eine Vielzahl von
Zahnelementen umfasst, die in einer Richtung entlang der Drehwelle
geschichtet sind und im gleichen Drehwinkel positioniert sind, und
die Zahnelemente definieren eine Vielzahl von Platteneinheiten,
wobei die Platteneinheiten einen gleichen Aufbau haben und in einer
Richtung entlang der Drehwelle geschichtet sind, wobei jede Platteneinheit
erste Zahnelemente, die über
einem ersten Winkelbereich mit gleichen Abständen in einer Umfangsrichtung
angeordnet sind, wobei in der Umfangsrichtung benachbarte, erste Zahnelemente
durch einen Spalt isoliert sind, und zweite Zahnelemente, die über einem
zweiten Winkelbereich mit gleichen Abständen in der Umfangsrichtung
angeordnet sind, umfasst, wobei die zweiten Zahnelemente mit einem
Verbinder versehen sind, welcher benachbarte, zweite Zahnelemente
an entweder einem Innenumfangsabschnitt zwischen dem Innenrotor
und den Ständerwicklungen
oder einem Außenumfangsabschnitt
zwischen dem Außenrotor und
den Ständerwicklungen
magnetisch verbindet, wobei der Verbinder dann ein Zahnelement eines
einzelnen Spulenkerns mit einem Zahnelement eines benachbarten Spulenkerns
verbindet, und wobei die zweiten Winkelbereiche der Platteneinheiten
in Bezug aufeinander in einer Umfangsrichtung verschoben werden,
so dass die Verbinder gleichmäßig in einer
Umfangsrichtung entlang der Drehwelle verteilt sind.
-
Die
Einzelheiten sowie andere Merkmale und Vorteile dieser Erfindung
sind in dem restlichen Teil der Beschreibung dargelegt und in den
beigefügten
Zeichnungen gezeigt.
-
Kurze Beschreibung
der Zeichnungen
-
1 ist ein schematisches
Diagramm eines Motor/Generators.
-
2 ist eine teilweise Querschnittsansicht eines
Stators.
-
3A und 3B sind eine Vorderansicht einer ersten
Platteneinheit und einer zweiten Platteneinheit, welche den Stator
des Motor/Generators bilden.
-
4 ist ein Diagramm, das
die Wechselbeziehung zwischen dem magnetischen Widerstandsverhältnis und
verschiedenen Kennlinien des Motor/Generators zeigt.
-
5 ist eine Vorderansicht
der zweiten Platteneinheit gemäß einem
zweiten Ausführungsbeispiel.
-
6 ist eine Vorderansicht
einer Platteneinheit gemäß dem Ausführungsbeispiel
dieser Erfindung.
-
7 ist eine Vorderansicht
einer Platteneinheit gemäß dem Ausführungsbeispiel
dieser Erfindung.
-
Beschreibung
der bevorzugten Ausführungsbeispiele
-
Bezugnehmend
auf 1 der Zeichnungen ist
der Motor/Generator 1 ausgestattet mit einem Stator 3,
einem Innenrotor 5, der einem Innenumfang des Stators 3 zugewandt
ist, und einem Außenrotor 7,
der einem Außenumfang
des Stators 3 zugewandt ist.
-
Der
Innenrotor 5 umfasst eine Drehwelle 6, und der
Außenrotor 7 umfasst
eine Drehwelle 8, die koaxial zur Drehwelle 6 angeordnet
ist.
-
Der
Innenrotor 5, der Außenrotor 7 und
der Stator 3 sind koaxial und in einer radialen Richtung überlagert
angeordnet. Der Innenrotor 5 und der Außenrotor 7 sind gelagert,
um frei auf einem Gehäuse 4 durch
entsprechende Drehwellen 6 und 8 zu drehen, und
der Stator 3 ist am Gehäuse 4 befestigt.
-
Der
Innenrotor 5 ist aus einem Dauermagneten gebildet, wobei
die Hälfte
seines Umfangs einen S-Pol bildet und die andere Hälfte des
Umfangs einen N-Pol bildet. Der Außenrotor 7 ist aus
einem Dauermagneten gebildet, mit der zweifachen Anzahl an Magnetpolen
wie der Innenrotor 5. Das heißt, die S-Pole und N-Pole wechseln alle
90 Grad.
-
Mit
dem obigen Verhältnis
der Magnetpole legt der Magnet des Innenrotors 5 keine
magnetische Kraft am Außenrotor 7 in
der Drehrichtung an, und der Magnet des Außenrotors 7 legt keine
magnetische Kraft am Innenrotor 5 in einer Drehrichtung
an.
-
Bezugnehmend
auf 2 umfasst der Stator 3 nun
eine Vielzahl von Spulenkernen 3A und Ständerwicklungen 16,
die auf den Spulenkernen 3A aufgewickelt sind.
-
Die
Spulenkerne 3A umfassen Zahnelemente 11, wie in 3A gezeigt, und Zahnelemente 11A, wie
in 3B gezeigt, die mit
einem feststehenden Schichtverhältnis
in der Richtung entlang der Drehwelle 6 geschichtet sind.
Die Zahnelemente 11 und 11A werden aus einer Ferrosiliziumplatte
mit einer Dicke von 0,5 mm gebildet, welche eine Isolierschicht auf
ihren Oberflächen
erzeugt.
-
Bezugnehmend
auf 3A ist das Zahnelement 11 radial
mit einem feststehenden Abstand 13, der zwischen dem Außenumfangsende
angrenzender Zahnelemente 11 beibehalten bleibt, angeordnet.
-
Bezugnehmend
auf 3B ist das Zahnelement 11A radial
in der gleichen Weise mit einem feststehenden Spalt 13,
der zwischen dem Außenumfangsende
angrenzender Zahnelemente 11A beibehalten bleibt, angeordnet.
-
Einkerbungen
sind vorab auf den Zahnelementen 11 ausgebildet, um ein
Bolzenloch 17 und einen Schlitz 15 zu erzeugen.
Die auf den Spulenkern 3A aufgewickelte Ständerwicklung 16 ist
in diesem Schlitz 15 untergebracht. Einkerbungen sind in
der gleichen Weise auf dem Zahnelement 11A ausgebildet.
-
Die
Zahnelemente 11 und 11A unterscheiden sich in
folgender Hinsicht.
-
Wie
in 3B gezeigt, berührt der
Innenumfangsabschnitt des Zahnelements 11A, das zwischen dem
Schlitz 15 und dem Innenrotor 5 liegt, den Innenumfangsabschnitt
eines benachbarten Zahnelements 11A als ein Teil 19.
Somit ist der magnetische Widerstand der Innenumfangsabschnitte
der benachbarten Zahnelemente 11A gleich Null.
-
In
der nachfolgenden Beschreibung wird dieses Kontaktteil als ein Verbinder 19 bezeichnet.
Dagegen bildet der Innenumfangsabschnitt einen Spalt in Bezug auf
das benachbarte Zahnelement 11, wie in 3A gezeigt. Somit liegt der Verbinder 19 nicht zwischen
den Innenumfangsabschnitten der benachbarten Zahnelemente 11, und
der magnetische Widerstand der Innenumfangsabschnitte des Zahnelements 11 ist
viel größer als
derjenige der Innenumfangsabschnitte der Zahnelemente 11A.
-
Die
Zahnelemente 11 und 11A werden in der folgenden
Weise montiert.
-
Wie
in 3A gezeigt, umfasst
die erste Platteneinheit 10A 24 Zahnelemente 11,
die in einer Ringform auf der gleichen, flachen Oberfläche ausgerichtet
sind. Wie in 3B gezeigt,
umfasst die zweite Platteneinheit 10B 24 Zahnelemente 11A,
die in einer Ringform auf der gleichen, flachen Oberfläche ausgerichtet
sind.
-
Jeder
Spulenkern 3A ist eine Schicht aus den Zahnelementen 11, 11A,
die mit dem gleichen Drehwinkel positioniert sind, als Ergebnis
eines Schichtens der ersten Platteneinheiten 10A und der zweiten
Platteneinheiten 10B mit einem feststehenden Schichtverhältnis und
Befestigen aneinander mittels Bolzen, die in die Bolzenlöcher eingesetzt werden.
-
Die
in den Bolzenlöchern 17 eingesetzten Bolzen
sind aus einem nicht-magnetischen Material, wie z. B. rostfreiem
Stahl oder dergleichen, gebildet.
-
Verbinder 19 sind
in der Richtung entlang der Drehwelle 6 in den Spulenkernen 3A an
den Stellen der zweiten Platteneinheiten 10B verteilt.
-
In
der folgenden Beschreibung wird der innere, magnetische Widerstand
der benachbarten Spulenkerne 3A als Rin bezeichnet, während der äußere, magnetische
Widerstand derselben als Rout bezeichnet wird. Der innere, magnetische
Widerstand ist ein Widerstand zwischen den Innenumfangsabschnitten
der Spulenkerne 3A. Der äußere, magnetische Widerstand
ist ein Widerstand zwischen den Außenumfangsabschnitten der Spulenkerne 3A.
-
Die
Innenumfangsabschnitte der Spulenkerne 3A bilden einen
Streumagnetkreis für
den Antriebsmagnetfluss des Innenrotors 5. Das Austreten des
Antriebsmagnetflusses für
den Innenrotor 5 nimmt ab, wenn der innere, magnetische
Widerstand Rin steigt.
-
Die
Außenumfangsabschnitte
der Spulenkerne 3A bilden einen Streumagnetkreis für den Antriebsmagnetfluss
des Außenrotors 7.
Das Austreten des Antriebsmagnetflusses für den Außenrotor 7 nimmt ab,
wenn der äußere, magnetische
Widerstand Rout steigt.
-
Die
Wechselbeziehung des Austretens des Magnetflusses des inneren, magnetischen
Widerstandes Rin und des äußeren, magnetischen
Widerstandes Rout ist relativ. Wenn z. B. der innere, magnetische
Widerstand Rin klein ist, steigt das Austreten des Antriebsmagnetflusses,
der durch die Innenumfangsabschnitte der Spulenkerne 3A fließt, während das Austreten
des Antriebsmagnetflusses, der durch die Außenumfangsabschnitte der Spulenkerne 3A fließt, abnimmt.
-
Die
Verbinder 19 sind aus dem folgenden Grund auf Abschnitten,
die dem Innenrotor 5 zugewandt sind, der weniger magnetische
Pole aufweist als der Außenrotor 7,
vorgesehen.
-
Die
Anzahl an Grenzen von N-Pol- und S-Pol-Feldern erhöht sich,
wenn die Anzahl der drehenden Magnetpole steigt, und somit erhöhen sich die
Möglichkeiten
für ein
Austreten von Magnetfluss in dem Stator. Somit muss der magnetische
Widerstand zwischen den Zahnelementen stark erhöht werden, wenn die Anzahl
der drehenden Pole steigt oder, in anderen Worten, wenn die Anzahl
der Magnetpole des Rotors steigt.
-
Der
Innenrotor 5 hat zwei Magnetpole, und der Außenrotor 7 hat
vier Magnetpole. Somit ist es bevorzugt, dass der äußere, magnetische
Widerstand Rout größer ist
als der innere, magnetische Widerstand Rin.
-
Die
Verbinder 19 sind auf den Innenumfangsabschnitten des Spulenkerns 3A vorgesehen, um
die obige Wechselbeziehung zu realisieren.
-
Durch
wahlweises Anwenden des Schichtanzahlverhältnisses der ersten Platteneinheiten 10A und
der zweiten Platteneinheiten 10B in einem Montagevorgang
der Spulenkerne 3A kann das Verhältnis Rin/Rout des inneren,
magnetischen Widerstandes Rin und des äußeren, magnetischen Widerstandes
Rout der Spulenkerne 3A in einer willkürlichen Weise festgelegt werden.
-
Nachdem
die Spulenkerne 3A montiert sind, werden die Spulenkerne 16 gebildet
durch Aufwickeln von Draht auf jeden Spulenkern 3A. Es
ist möglich,
den Stator 3 zu kühlen,
indem ein Kühlmedium, wie
z. B. Wasserstoffgas, Luft oder dergleichen, durch den Spalt 13 strömt.
-
Wieder
zurück
zu 1, wird nun ein elektrischer
Strom von dem Inverter 23 zu den Ständerwicklungen 16 des
Stators 3 zugeführt.
Der Inverter 23 umfasst eine feststehende Anzahl von Transistoren
und eine gleiche Anzahl von Dioden. Ein Pulsbreitenmodulationssignal
wird von einer Steuereinheit 29 an jedes Gate des Inverters 23 ausgegeben, das
heißt,
zur Basis des Transistors. Der Inverter 23 gibt einen Verbundwechselstrom
an die Ständerwicklungen 23 des
Stators 3 in Antwort auf das Pulsbreitenmodulationssignal
aus.
-
Um
den Verbundwechselstrom zu steuern, werden Signale in die Steuereinheit 29 von
einem Drehpositionssensor 25, der die Drehposition des
Innenrotors 5 erfasst, und einem Drehpositionssensor 27,
der die Drehposition des Außenrotors 7 erfasst, eingegeben.
Innendrehmoment-Befehlswerte, die ein Zieldrehmoment des Innenrotors 5 angeben,
und Außendrehmoment-Befehlswerte, die
ein Zieldrehmoment des Außenrotors 7 angeben,
werden ebenfalls in die Steuereinheit 29 eingegeben.
-
Der
Drehmomentbefehlswert ist ein positiver Wert, wenn der Rotor als
ein Motor funktioniert, und ein negativer Wert, wenn der Rotor als
ein Generator angetrieben wird. Die Steuereinheit 29 berechnet
einen Strom, der notwendig ist, um das drehende Magnetfeld zu erzeugen,
um den Innendrehmoment-Befehlswert
auf der Grundlage der erfassten Drehposition des Innenrotors 5 und
den Innendrehmoment-Befehlswert zu realisieren.
-
In
gleicher Weise wird der Strom, der erforderlich ist, um das drehende
Magnetfeld zu erzeugen, um den Außendrehmoment-Befehlswert zu realisieren,
auf der Grundlage der Drehposition des Außenrotors 7 und des
Außendrehmoment-Befehlswertes
berechnet.
-
Durch
Ausgeben der Pulsbreitenmodulationssignale zum Inverter 23 steuert
die Steuereinheit 21 den Inverter 23, so dass
der Inverter 23 die Ständerwicklungen 16 mit
einem Verbundstrom der obigen zwei Typen von Strom versorgt. Dieses
Prinzip ist in der oben erwähnten
Tokkai-Hei-11-275856 offenbart.
-
Bezugnehmend
auf 4 werden die verschiedenen
Kennlinien des Motor/Generators 1 durch das magnetische
Widerstandsverhältnis Rin/Rout
der Spulenkerne 3A bestimmt.
-
In
der Figur zeigt die gekrümmte
Linie A das Drehmoment, das auf den Innenrotor 5 wirkt
(nachfolgend als „Innendrehmoment" bezeichnet). Die
gekrümmte
Linie B zeigt das Drehmoment, das auf den Außenrotor 7 wirkt (nachfolgend
als „Außendrehmoment" bezeichnet). Die
gekrümmte
Linie C zeigt die Leistung des Innenrotors 7 (nachfolgend
als „Innenleistung" bezeichnet). Die
gekrümmte
Line D zeigt die Summe der Innenleistung und der Leistung des Außenrotors 7 (nachfolgend
als „Außenleistung" bezeichnet). Die
gekrümmte
Linie E zeigt den Lastfaktor der Leistungsquelle.
-
Die
Außenleistung
wird durch Subtrahieren der Innenleistung von der Summe der Leistung
erhalten. Der Lastfaktor der Leistungsquelle ist das Verhältnis des
absoluten Wertes der von der Batterie 21 zugeführten Leistung
und dem absoluten Wert der Summe der Innenleistung und der Außenleistung.
-
Der
Punkt S zeigt den Punkt der maximalen Leistungsdichte und stellt
den maximalen Wert der Summe der Leistung dar. Die gesamte Ausgabe
des Motor/Generators ist ein Maximum an dem Maximalpunkt der Leistungsdichte.
Der Punkt S wird erhalten, wenn das magnetische Widerstandsverhältnis Rin/Rout
einen Wert von ungefähr
0,03 aufweist.
-
Der
Punkt T zeigt den Leistungsäquivalenzpunkt,
an dem die Innenleistung und die Außenleistung gleich sind. Wenn
ein Rotor 5 oder 7 als ein Generator angetrieben
wird und der andere Rotor 5 oder 7 als ein Motor
mit der erzeugten, elektrischen Energie angetrieben wird, ist es
möglich,
die elektrische Energie am wirksamsten an diesem Punkt zu nutzen. Der
Punkt T wird erhalten, wenn das magnetische Widerstandsverhältnis Rin/Rout
einen Wert von ungefähr
0,38 aufweist.
-
Der
Punkt U zeigt den minimalen Punkt für den Lastfaktor der Leistungsquelle,
welcher der Punkt ist, an dem der Wirkungsgrad des Inverters 23 ein
Maximum erreicht und der Heizwert des Inverters 23 minimiert
wird. Der Punkt U wird erhalten, wenn das magnetische Widerstandsverhältnis Rin/Rout
einen Wert von ungefähr
0,54 aufweist.
-
Somit
werden das magnetische Widerstandsverhältnis Rin/Rout, erwünscht für den Spulenkern 3A,
und das entsprechende Schichtanzahlverhältnis der ersten Platteneinheiten 10A und
der zweiten Platteneinheiten 10B bestimmt auf der Grundlage
der erforderlichen Bewegungskennlinien des Motor/Generators, und
die Vielzahl der Spulenkerne 3A wird durch Schichten der
Platteneinheiten 10A, 10B unter dem bestimmten
Schichtanzahlverhältnis
montiert.
-
In
der obigen Weise ist es möglich,
das magnetische Widerstandsverhältnis
Rin/Rout während des
Herstellverfahrens in einer willkürlichen Weise in Antwort auf
die erforderlichen Bewegungskennlinien zu verändern, ohne den Aufbau des
Stators 3 zu verändern.
-
Das
Schichtanzahlverhältnis
der ersten Platteneinheit 10A und der zweiten Platteneinheit 10B werden
auf die folgende Weise bestimmt.
-
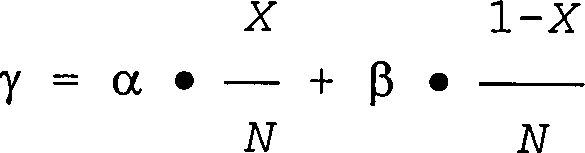
Das
magnetische Widerstandsverhältnis
der ersten Platteneinheit 10A, das magnetische Widerstandsverhältnis der
zweiten Platteneinheit 10B und das gewünschte, magnetische Widerstandsverhältnis des
Spulenkerns 3A werden mit α, β bzw. γ bezeichnet. Die Gesamtanzahl
der Schichten der Platteneinheiten 10A und 10B wird
als N angenommen, und die Anzahl der Schichten der ersten Platteneinheit 10A wird
als X angenommen.
-
Der
Spulenkern 3A erzeugt einen extrem großen, magnetischen Widerstand
in einer axialen Richtung aufgrund der Bildung einer Isolierschicht auf
der Oberfläche
des Zahnelements 11, 11A.
-
Die
Größe des magnetischen
Widerstandes ist ungefähr
proportional zur Anzahl der Schichten. Die folgende Gleichung wird
auf der Grundlage der obigen Anordnung aufgestellt.
wobei α > β und
X = 1, 2,..., N.
-
Wenn
es gewünscht
ist, das magnetische Widerstandsverhältnis des Spulenkerns 3A auf γ festzulegen,
kann das Schichtverhältnis
X/N der ersten Platteneinheiten 10A auf einen Wert gesetzt
werden, der die obige Formel erfüllt.
Die Werte des magnetischen Widerstandsverhältnisses α der ersten Platteneinheit 10A und
der Wert des magnetischen Widerstandsverhältnisses β der zweiten Platteneinheit 10B können passend
verändert
werden durch Verändern
der Struktur der Platteneinheiten 10A und 10B,
das heißt,
der Anzahl, Abmessungen und Form der Zahnelemente 11, 11A.
-
Die
untere Grenze P1 des einstellbaren Bereichs des magnetischen Widerstandsverhältnisses γ des Spulenkerns 3A ist
das magnetische Widerstandsverhältnis
Rin/Rout des Spulenkerns 3A, wenn das Schichtanzahlverhältnis der
ersten Platteneinheit 10A 0% ist und das Schichtanzahlverhältnis der
zweiten Platteneinheit 10B 100% ist. Die obere Grenze P2
ist das magnetische Widerstandsverhältnis Rin/Rout des Spulenkerns 3A,
wenn das Schichtanzahlverhältnis
der ersten Platteneinheit 10A 100% ist und das Schichtanzahlverhältnis der zweiten
Platteneinheit 10B 0% ist. In 3 ist das magnetische Widerstandsverhältnis α der ersten Platteneinheit 10A auf
0,6 festgelegt, und das magnetische Widerstandsverhältnis β der zweiten
Platteneinheit 10B ist auf einen Wert nahe 0 festgelegt.
-
Somit
ist es möglich,
die Änderung
der Kennlinien der Bewegung des Motor/Generators bei gleichem Grundaufbau
durch Montieren von zwei Arten von Platteneinheiten 10A und 10B mit
einem wie oben berechneten Schichtanzahlverhältnis zu erleichtern.
-
Ein
zweites Ausführungsbeispiel
wird nunmehr unter Bezugnahme auf 5 beschrieben.
-
Dieses
Ausführungsbeispiel
unterscheidet sich vom ersten Ausführungsbeispiel in Bezug auf den
Aufbau der zweiten Platteneinheit 10B. In anderen Aspekten
ist das zweite Ausführungsbeispiel
das gleiche wie das erste Ausführungsbeispiel.
-
Die
zweite Platteneinheit 10B ist aus einer Ferrosiliziumplatte
gebildet, die als eine einzelne Platte 31 geformt ist.
-
Die
zweite Platteneinheit 10B weist eine Vielzahl von Zahnelementen 31A auf,
die sich in einer radialen Richtung erstrecken. Ein Spalt 13 ist
zwischen den Außenenden
der benachbarten Zahnelemente 31A ausgebildet. Andererseits
sind die Innenumfangsabschnitte der Zahnelemente 31A unmittelbar angrenzend
in einer Umfangsrichtung.
-
Somit
ist der magnetische Widerstand in einer Umfangsrichtung zwischen
den Innenumfangsabschnitten der Zahnelemente extrem klein. Die erste
Platteneinheit ist genau die gleiche wie die erste Platteneinheit 10A,
die im ersten Ausführungsbeispiel
beschrieben wurde.
-
Das
zweite Ausführungsbeispiel
ermöglicht es,
dass der innere, magnetische Widerstand Rin weiter verringert wird
auf ein niedrigeres Niveau als den der zweiten Platteneinheit 10B im
ersten Ausführungsbeispiel.
-
Das
Ausführungsbeispiel
dieser Erfindung wird nachfolgend unter Bezugnahme auf 6 und 7 beschrieben.
-
In
diesem Ausführungsbeispiel
wird der Spulenkern 3A gebildet durch Laminieren eines
einzelnen Typs von Platteneinheit 40 an Stelle von zwei
Typen von Platteneinheiten 10A und 10B, die im
ersten und zweiten Ausführungsbeispiel
verwendet wurden.
-
Bezugnehmend
auf 6 ist die Platteneinheit 40 in
zwei Abschnitte 41, 43 unterteilt, wobei jeder
180° der
Platteneinheit 40 entspricht.
-
Der
Abschnitt 41 wird aus den Zahnelementen 11 des
ersten Ausführungsbeispiels
gebildet. Der Abschnitt 43 wird aus den Zahnelementen 11A des ersten
Ausführungsbeispiels
gebildet.
-
Die
in 7 gezeigte Platteneinheit 40 ist
in einen 315°-Abschnitt 41,
gebildet aus den Zahnelementen 11, und einen 45°-Abschnitt 43,
gebildet aus den Zahnelementen 11A, unterteilt.
-
In
jedem Fall bilden die Zahnelemente 11B, die auf den Grenzen
der Abschnitte 41 und 43 angeordnet sind, Hälften gleich
der Form der Zahnelemente 11. Die übrigen Hälften haben eine gleiche Form
wie die Zahnelemente 11A.
-
Wie
oben gezeigt, kann das magnetische Widerstandsverhältnis Rin/Rout
willkürlich
eingestellt werden durch Verändern
des Winkelverhältnisses der
Abschnitte 41 und 43, wenn der Spulenkern 3A durch
Laminieren der Platteneinheiten 40 gebildet ist. In diesem
Ausführungsbeispiel
sind Verbinder 19 nur an einem bestimmten Winkelbereich
in der Umfangsrichtung der Platteneinheit 40 vorgesehen.
-
In
diesem Ausführungsbeispiel
sind die Zahnelemente 11 und 11A kombiniert. Jedoch
ist es möglich,
eine einzelne Platteneinheit durch Zusammenfügen der Zahnelemente 11 mit
dem zweiten Plattenelement 10B des zweiten Ausführungsbeispiels
zu kombinieren.
-
Wenn
die Platteneinheiten 40 laminiert werden, um den Spulenkern 3A zu
bilden, ist es bevorzugt, die Position des Abschnitts 43 in
einer Drehrichtung jeder Schicht zu verschieben, um so eine gleichmäßige Verteilung
der Abschnitte 43 zu erzeugen. Auf diese Weise ist es möglich, eine
gleichmäßige Wärmeverteilung
im Stator 3 sicherzustellen und die Kühlung zu verbessern.
-
Obwohl
die Erfindung oben unter Bezugnahme auf ein Ausführungsbeispiel der Erfindung
beschrieben wurde, ist die Erfindung nicht auf das oben beschriebene
Ausführungsbeispiel
beschränkt.
Modifikationen und Variationen des oben beschriebenen Ausführungsbeispiels
werden den Fachleuten einfallen, im Rahmen der beigefügten Ansprüche.
-
Zum
Beispiel ist es möglich,
die Platteneinheit 40 des Ausführungsbeispiels der Erfindung
mit den zwei Arten von Platteneinheiten 10A und 10B im ersten
und zweiten Ausführungsbeispiel
zu kombinieren.