EP0226489A1 - Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique - Google Patents
Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique Download PDFInfo
- Publication number
- EP0226489A1 EP0226489A1 EP86402478A EP86402478A EP0226489A1 EP 0226489 A1 EP0226489 A1 EP 0226489A1 EP 86402478 A EP86402478 A EP 86402478A EP 86402478 A EP86402478 A EP 86402478A EP 0226489 A1 EP0226489 A1 EP 0226489A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- support
- tracks
- supports
- linked
- self
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/06—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps
- A61G5/061—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps for climbing stairs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/06—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps
- A61G5/066—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps with endless belts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/1054—Large wheels, e.g. higher than the seat portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/14—Standing-up or sitting-down aids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2200/00—Information related to the kind of patient or his position
- A61G2200/50—Information related to the kind of patient or his position the patient is supported by a specific part of the body
- A61G2200/52—Underarm
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
- A61G5/041—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven having a specific drive-type
- A61G5/045—Rear wheel drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/1056—Arrangements for adjusting the seat
- A61G5/1075—Arrangements for adjusting the seat tilting the whole seat backwards
Definitions
- the present invention relates to equipment for the disabled and relates more particularly to those allowing verticalization, that is to say the vertical positioning of the patient who remains almost constantly in the sitting position.
- the equipment of the wheelchair must be designed so as to lower the center of gravity as much as possible in order to minimize the moment of overturning when crossing obstacles such as stairs for example.
- the commands must be easily accessible or even result from verbal instructions in the case of deep quadriplegics.
- the verticalization must be able to be programmed over time with predetermined sequences.
- the elements of the chair must be able to adapt to the patient's morphology.
- the power supply of the wheelchair must be ensured from a battery of suitable longevity and all the elements must be able to be relayed manually quickly in the event of failure of the electrical supply.
- the verticalization is obtained by tilting, which requires a significant effort from the patient in particular of the abdominals and who in any case places it in support on his legs.
- the sequences are also not automated.
- the translation is carried out using motorized tracks of the tank type dangerously putting the patient in a critical position when crossing an obstacle; the plate not being kept.
- the invention proposes a self-propelled wheelchair for the handicapped major comprising an automatic verticalization device associated with a plate conservator which does not have the aforementioned drawbacks and which can bring a set of advantages never before proposed to date.
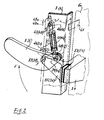
- the chair according to Figure 1 is first of all characteristic in that it can ensure a constant attitude to the patient who is installed there.
- a rigid support structure marked 1 providing various functions: - it constitutes the internal frame 2 of the gimbal system which will be discussed below, - it provides the sliding amounts 3 and 4 receiving the sliding support which will also be discussed below, - it carries the armpit supports marked 5 and 6 as a whole, it includes the pivot axis of the under-leg portion 7, the operation of which will be explained below, - it carries the retractable footrests 8 and 9
- This supporting structure is linked to the wheels 10 and 11 by a universal joint comprising an external frame 12, an intermediate frame 13 and the internal frame 2 carrying the lifting cylinder 14; the arrangement of these members being such that the axis 15 of translation of the lifting cylinder, the axis 16 of roll correction and the axis 17 of pitch correction are coincident at point 18 of common articulation,
- the external frame 12 carries the geared motors 19 (G) and 20 (D) which independently allow the drive of the wheels on the common axis.
- the electric battery 21 is arranged under the universal joint and connected to the internal frame 2.
- the outer frame 12 carries arms 22 (23) receiving the pivots 24 (25) of the front casters 26 (G) and 27 (D).
- This gimbal system additionally comprises, as will be seen more clearly from FIGS. 3 and 4, electric actuators; one 28 for correction of roll the other 29 for correction of pitch.
- the cylinders are mounted at their ends with ball joints 30-31 and 32-33 in order to allow the angular deflections ⁇ ⁇ and ⁇ ⁇ made possible by the fact that their low point of articulation is located below the axis 18 for the ball 31 and perpendicular to the axis 17 for the ball 33.
- the sliding support 34 shown in more detail in its left part in FIG. 2, comprises two legs 35G (and 36D) carrying axes 37G (and 38D) of articulation of the armpit supports 5 and 6.
- These support armpits are shaped according to FIG. 2 so that, on the one hand, an axis 39G (and 40D) allows in rebate the articulation of a chappe 41G (and 42D) constituting a spring device 43G (and44D) articulated at its other end by a 45G clevis (and 46D) on a 47G (and 48D) axis linked to the 3G (and 4D) uprights.
- the spring device 43G (et44D) comprises a compression spring 49G (and 50D) arranged on the axis with a shoulder 51G (and 52D) so that the rise of the sliding support 34 correlatively causes an output of the supports. armpits 5G (and 6D) in the direction of arrow F; such an output action then being made "flexible" by the fact of the interposition of said spring.
- a casing of the spring is provided as well as all the prominences and asperities are arranged so as not to injure the patient in any case during the lifting.
- a plastic sliding element 53G (and 54D) is interposed to reduce friction.
- the rigid structure 1 therefore comprises a lifting support 34 whose movement is ensured by the electric lifting cylinder 14 having a sufficient stroke to ensure the verticalization of the subject as a function of its morphology.
- This cylinder 14 is linked to the internal frame 2 as follows from the description above and its translation axis passes at 18 which is the point of coincidence of the axes of the gimbal system.
- the seat of the subject must be arranged in a certain manner as a result of the verticalization movement and determined according to the conformation that it is necessary to obtain to ensure the comfort of the patient,
- the seat base has two parts; one fixed consisting of a rounded step 62 formed in the lower part of the backsplash 60 the other, mobile 63 articulated on the lateral elements of the support structure 1.
- This mobile part around the axis 64 constitutes the seat under- patient's thigh when in a horizontal position, by the action of a suitable spring 65 and a suitable locking mechanism (not shown) acting on the lateral parts of the support structure 1.
- the reduction of the mobile part 63 is obtained by the action of a cable 66 passing over a pulley 67 and then connected, on the one hand, to a point 68 of the support 34 and on the other hand, to another point 69 of the moving part 63.
- the patient In the seated position, the patient has his feet placed on the footrests 8G (and 9D) which retract by lateral pivoting according to arrow H in FIG. 1.
- This pivoting is obtained by small electric gearmotors (no n shown) including the action is coordinated with verticalization.
- the manual controls are also arranged on the housing 70 positioned on the armrest of the structure 1.
- the armpit supports 5-6 are lowered and fitted inside the uprights 3-4.
- the support 34 is in the low position and the under-leg support 62 is locked while the legs are supported on their retractable footrest 8-9.
- the patient can be directed by action on the manual control 70 by acting on the traction motor reducers 19 and / or 20.
- the disabled person could also be directed by an assistant by the fact that the motor reducers are mounted "at friction".
- the patient himself causes the verticalization operation proper by acting on the appropriate control of the housing 70.
- the coordination of all these movements is such that all the sequences are carried out smoothly without abruptness and according to predetermined cycles taking into account the exposure times necessary for the restoration of the circulatory system.
- the plate is constantly provided automatically.
- the patient's feet hang down without resting on the floor (according to Y) ensuring total suspension which can allow the chair to move.
- it is certain that such a standing movement is preferable on smooth and unobstructed ground. as a result of the increased overturning moment resulting from verticalization;
- the reverse de-verticalization operation is carried out in the opposite direction so that the patient finds himself in the initial sitting position while still respecting the required exposure times.
- the jacks used can be of the ball type for the lifting one 14 and taken in those of the trade for the lifting of the vehicles for those of roll 28 and of pitch 29. These jacks are electric and powered by the battery 21 and can be manually controlled when necessary by the cranks 71-72-73.
- the adaptation of the chair to various morphologies is ensured by the proper positioning of the axes 45G (and 46D) of the armpit supports 5G (and 6D) on predetermined holes 47a.,. 48a ... in the 3G (and 4D) amount.
- the stroke of the lifting cylinder 14 is adjusted by limit switches (not shown).
- the length of the cable 66 is arranged so that the footrests 8-9 are adjusted to height.
- this chair is to the standards in use, namely: length L ⁇ 125 cm, width l ⁇ 75 cm and height h from the floor to the knees ⁇ 65 cm.
- the chair is also very stable due to the low position of its center of gravity which is located moreover in the immediate vicinity of the center of the support polygon formed by the ground contact points of the wheels and casters.
- the chair as described comprises exclusively for the sole translation, conventional motor elements such as wheels and casters encountered in different other models and this does not come within the scope of the invention.
- the invention therefore proposes, in a second step, an adaptation of the chair as previously described which implements a set of tracks which are shaped and arranged in a manner specific to the problem posed.
- the recommended track system essentially comprises, as is particularly visible in FIG. 7, a set of front tracks 81G (and 82D) and a set of rear tracks 83G (and 84D) articulated on supports as will be explained now.
- the rear axles have journalled on the supports 78-79 and receive sprockets 85G (and 86D) for toothed belts 87-88 and they carry the track carrier wheels 89G (and 90D) as well as one of the end parts of a support in U 91G (and 92D).
- the other end of the support 91G (and 92D) carries another axis passing through 93G (and 94D) supporting on either side of the support wheels of internal tracks 95G (and 96D) and external 97G (and 98D).
- the external tracks 99G (and 100D) surround the wheels 90-98 with their own grip means (notching for example) and an external folding 101G (and 102D) of the U allows to ensure an internal bearing friction to the tracks which are of course made of a rubbery material.
- the front tracks 103G (and 104D) surround: the track wheels 95-96 and other front wheels 105 G (and 106D) carrying axes 107G (and 108D) journalled forward on U 109G (and 110D) themselves journalled on axes 93-94.
- an internal folding 111G (and 112D) can ensure an internal friction of support for the tracks which are likewise made of a rubbery material.
- the two inclinations will be different which means that the outer frame 12 will itself be in a left inclination, the most unfavorable, which will immediately correct the action of the v roll 28 and pitch 29 rinses controlled by the attitude detector 59.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Invalid Beds And Related Equipment (AREA)
- Rehabilitation Tools (AREA)
Abstract
l'invention concerne les fauteuils automoteurs pour handicapés. Le fauteuil visé par l'invention est particulièrement stable et comporte un dispositif de verticalisation automatique et un équipement adaptable par roues motrices ou chenilles permettant le franchissement d'obstacles en particulier d'escaliers tournants.
Il est essentiellement constitué d'une structure rigide (1) qui est d'une part, liée aux moyens de transmission par un systèmme à la cardan à vérins électriques(28-29) et d'un détecteur d'assiette avec un cadre interne(2), un cadre intermédiaire(13) un cadre externe(12) et leurs pivots et qui est d'autre part, muni en sa partie supérieure du dispositif de verticalisation comprenant un support(34), guidé sur les montants(3-4) et le vérin de levage(14) qui agit simultanément:sur la sortie des appuis d'aisselles(5-6), pour effectuer doucement la préhension sous aisselles et le levage du patient,sur l'abaissement de l'appuis sous-cuissard débrayable(63),et sur l'escamotage latéral des reposes pieds(8-9), tandis qu'un redan arrondi sous-fessier lié à un dosseret assure un confort sécurisant.
Il est essentiellement constitué d'une structure rigide (1) qui est d'une part, liée aux moyens de transmission par un systèmme à la cardan à vérins électriques(28-29) et d'un détecteur d'assiette avec un cadre interne(2), un cadre intermédiaire(13) un cadre externe(12) et leurs pivots et qui est d'autre part, muni en sa partie supérieure du dispositif de verticalisation comprenant un support(34), guidé sur les montants(3-4) et le vérin de levage(14) qui agit simultanément:sur la sortie des appuis d'aisselles(5-6), pour effectuer doucement la préhension sous aisselles et le levage du patient,sur l'abaissement de l'appuis sous-cuissard débrayable(63),et sur l'escamotage latéral des reposes pieds(8-9), tandis qu'un redan arrondi sous-fessier lié à un dosseret assure un confort sécurisant.
Description
- La présente invention concerne les équipements pour handicapés et a trait plus particulièrement à ceux permettant la verticalisation c'est à dire la mise en position verticale du patient qui reste pratiquement constamment en position assise.
- Elle vise également des moyens de déplacement autonomes automoteurs soit à roues soit à chenilles permettant le franchissement de certains obstacles et le processus de montée de certains escaliers.
- On sait que le problème de la verticalisation des handicapés majeurs est souhaitable pour de nombreuses raisons:
- trophique car elle permet de limiter les déformations et les atrophies qu'entraînent une station assise prolongée. Ces déformations sont encore plus critiques lorsque le sujet est en période de croissance et de développement. En outre se trouvent améliorés par la verticalisation: les déminéralisations osseuses, la fréquence des escarres, les attitudes vicieuses,
- sur le plan de la prévention des complications de décubitus respiratoire et cardiovasculaire,
- selon un aspect psychologique car elle permet au patient de prendre "par lui même" une attitude naturelle pour tout le monde sans avoir à demander assistance à autrui. - En outre il est souhaitable d'accompagner une telle verticalisation d'une autonomie de déplacements acceptant les accidents de terrain voire le franchissement de certains escaliers par exemple.
- Enfin, on sait que toute mise en verticalisation d'un handicapé doit s'effectuer progressivement avec des paliers d'attente et ce, notamment pour des raisons d'ordre cardio-vasculaire.
- Dans les milieux médicaux spécialisés, il est connu que le seul lieu de préhension d'un handicapé hémiplégique ou tétraplégique se trouve situé sous les aiselles car c'est le seul endroit qui permet de placer le corps en suspension totale sans provoquer pour autant des réactions secondaires dangereuses comme cela est le cas lorsqu'on le met en appuis sur ses jambes par exemple.
- La solution au problème de la verticalisation n'est pas évidente car elle doit répondre à de nombreux impératifs qui sont parfois contradictoires.
- la stabilité doit être assurée par le fait que le centre de gravité doit être situé dans le voisinnage immédiat du centre du polygone de sustentation limité par les points de contact du fauteuil avec le sol et ce dans les deux positions assises ou debout du patient.
- Les équipements du fauteuil doivent être conçus de manière à abaisser le plus possible le centre de gravité afin de minimiser le moment de renversement lors de franchissement d'obstacles tels que des escaliers par exemple.
- Les commandes doivent être accessibles aisèment voire même résulter d'instructions verbales dans le cas de tétraplégiques profonds.
- la verticalisation doit pouvoir être programmée dans le temps avec des séquences prédéterminées.
- Les éléments du fauteuil doivent pouvoir s'adapter à la morphologie du patient.
- l'encombrement doit rester celui des fauteuils roulants conventionnels.
- L'alimentation électrique du fauteuil doit être assurée à partir d'une batterie de longévité convenable et tous les éléments doivent pouvoir être relayés manuellement rapidement en cas de défaillance de l'alimentation éléctrique.
- La sécurité selon laquelle le handicapé ne doit jamais se sentir en situation dangereuse.
- Enfin, le critère du prix de revient qui doit rester dans des limites acceptables.
- Toutes ces conditions n'ont jamais été réunies conjointement à la connaissance du demandeur.
- Selon un type de fauteuil connu, la verticalisation s'obtient par basculement, ce qui requiert un effort important du patient notamment des abdominaux et qui de toute façon, le place en appuis sur ses jambes. Les séquences ne sont pas de plus, automatisées.
- Selon un autre type de fauteuil, la translation s'effectue à l'aide de chenilles motorisées du genre char d'assaut mettant dangereusement le patient en position critique lors du franchissement d'un obstacle; l'assiette n'étant pas conservée.
- L'invention propose un fauteuil automoteur pour handicapé majeur comportant un dispositif de verticalisation automatique associé à un conservateur d'assiette qui ne présente pas les inconvénients cités et qui peut apporter un ensemble d'avantages jamais encore proposé à ce jour.
- Selon un tel fauteuil;
- l'assiette portant l'assise du patient est constamment conservée grâce à un montage à la cardan lié à des vérins appropriés et un détecteur d'assiette adapté,
- les éléments lourds (batterie...) sont rassemblés en position basse,
- le mode de propulsion par roues motrices ou chenilles articulées motrices peut être adapté rapidement,
- la conformation des chenilles articulées peut permettre le franchissement d'obstacles ou monter des escaliers droits voir tournants et ce, avec conservation d'assiette,
- les éléments essentiels réglables peuvent être adaptés à la morphologie du sujet (enfant...)
- toutes les commandes telles que conduite du fauteuil, ordre de verticalisation avec escamotage conjoint des appuis-pieds sont à la disposition manuelle du patient ou bien sont reçues à partir de l'enregistrement de sa voix,
- toutes les actions mécaniques peuvent êtres reprises en main instantannément en cas de besoin,
- le matériel mis en oeuvre est déja rencontré dans le commerce, ce auxfins d'abaissement des coûts.
-ses dimensions et encombrements sont aux normes en la matière. - L'invention va de toutes manières être bien comprise dans la suite du texte qui va décrire, à titre d'exemple et à l'appui des dessins annexés, une forme de réalisation d'un fauteuil automoteur pour handicapé majeur comportant un dispositif de verticalisation automatique et un conservateur d'assiette.
- Sur les dessins:
- La figure 1 est une vue en perspective de l'ensemble du fauteuil selon l'invention dans une conformation avec roues,
- La figure 2 représente en perspective un détail du mécanisme de levage d'aisselles,
- la figure 3 est une vue en coupe partielle selon A de la figure 1,
- la figure 4 est une vue en coupe partielle selon B de la figure 1,
- la figure 5 est une vue en perspective semblable à la figure 1 dans laquelle des chenilles ont été disposées en lieu et place des roues,
- la figure 6 est une vue perspective montrant le détail de la conformation des chenilles du coté droit de la figure 5
- la figure 7 est une vue en perspective montrant les modes de liaisons des chenilles,
- la figure 8 est un détail en coupe selon C de la figure 7,
- la figure 9 est un détail en perspective de la figure 8.
- Le fauteuil selon la figure 1 est tout d'abord caractéristique en ce qu'il peut assurer une assiette constante au patient qui y est installé.
- Pour ce faire, le patient est solidarisé à une structure porteuse rigide repérée 1 assurant diverses fonctions:
- elle constitue le cadre interne 2 du système à cardan dont il sera parlé ci-après,
- elle assure les montants de glissement 3 et 4 recevant le support glissant dont il sera également parlé ci-après,
- elle porte les appuis d'aisselles repérés 5 et 6 dans leur ensemble,
- elle comprend l'axe de pivotement de la partie sous-cuissarde 7 dont le fonctionnement sera exposé par la suite,
- elle porte les repose-pieds escamotables 8 et 9 - Cette structure porteuse est liée aux roues 10 et 11 par un ensemble à la cardan comprenant un cadre externe 12, un cadre intermédiaire 13 et le cadre interne 2 portant le vérin de levage 14; l'agencement de ces organes étant tel que l'axe 15 de translation du vérin de levage, l'axe 16 de correction de roulis et l'axe 17 de correction de tangage sont coincidants au point 18 d'articulation commune,
- Le cadre externe 12 porte les moto-réducteurs 19 (G) et 20 (D) qui permettent indépendamment l'un de l'autre l'entraînement des roues sur l'axe commun.
- La batterie électrique 21 est disposée sous l'ensemble à la cardan et reliée au cadre interne 2.
- Le cadre externe 12 porte des bras 22(23) recevant les pivots 24(25) des roulettes avant 26(G) et 27(D).
- Ce système à la cardan comporte en complément, comme cela ressortira mieux des figures 3 et 4, des vérins électriques; l'un 28 de correction de roulis l'autre 29 de correction de tangage.
- Les vérins sont montés en leurs extrèmités avec des rotules 30-31 et 32-33 afin de permettre les débattements angulaires ± α et ± β rendus possibles par le fait que leur point d'articulation bas est situé à l'aplomb de l'axe 18 pour la rotule 31 et à l'aplomb de l'axe 17 pour la rotule 33.
- De la sorte le cône embrassé par les débattements possibles de l'axe 15 est limité aux angles α et β et ce débattement est contrôlé par l'action des vérins 28 et 29.
- Comme cet axe 15 reste parallèle aux montants de glissement 3 et 4, le support de levage 34 encastré sur lesdits montants pourra, comme cela ressort mieux de la figure 2, assurer une translation rigoureuse sous l'action du vérin 14.
- Le support de glissement 34 montré plus en détail en sa partie gauche sur la figure 2, comporte deux pattes 35G (et 36D) portant des axes 37G (et 38D) d'articulation des appuis d'aisselles 5 et 6. Ces appuis d'aisselles sont conformés selon la figure 2 de telle sorte que, d'une part, un axe 39G (et 40D) permet en feuillure l'articulation d'une chappe 41G(et 42D) constitutive d'un dispositif à ressort 43G(et44D) articulé en son autre extrémité par une chappe 45G(et 46D) sur un axe 47G (et 48D) lié aux montants 3G (et 4D).
- Le dispositif à ressort 43G(et44D) comporte un ressort de compression 49G (et 50D) disposé sur l'axe avec un épaulement 51G (et 52D) de telle sorte que la montée du support de glissement 34 entraîne corrélativement une sortie des appuis d'aisselles 5G (et 6D) dans le sens de la flèche F; une telle action de sortie étant alors rendue "souple" par le fait de l'interposition dudit ressort.
- Bien entendu, un capotage du ressort est prévu de même que toutes les proéminences et aspérités sont aménagées afin de ne blesser en aucun cas le patient au cours de la levée.
- En complément, un élément de glissement plastique 53G (et 54D) est interposé pour réduire les frottements.
- La structure rigide 1 comporte donc un support de levage 34 dont le déplacement est assuré par le vérin électrique de levage 14 possédant une course suffisante pour assurer la verticalisation du sujet en fonction de sa morphologie.
- Ce vérin 14 est lié au cadre interne 2 comme cela résulte de la description ci-dessus et son axe de translation passe en 18 qui est le point de coïncidence des axes du système à la cardan.
- Un tel système est bien connu en soi et l'on sait que des portées appropriées assurent les articulations convenables telles que 55G (et 56D) entre les cadres 12 et 13 et 57G (et 58D) entre les cadres 2 et 13 comme cela résulte des figures 3 et 4.
- Sur ces figures 3 et 4 a également été représenté (symboliquement) le détecteur d'assiette 59 logé à intérieur du cadre 2. Ce détecteur qui donne les ordres aux vérins de roulis et de tangage et qui est bien connu en soi, peut toutefois être constitué simplement d'une petite quantité de mercure disposée au fond d'un boîtier en forme d'assiette creuse d'où sont disposés orthogonalement en périphérie des contacts-électrodes de commande des vérins. De la sorte, toute anomalie de niveau va se traduire par une mise en circuit par le mercure de l'électrode de contact concernée par la dénivellation et qui va immédiatement réagir sur le vérin électrique correspondant à la correction souhaitée. Il est à noter que ce détecteur à mercure dispense de tout système d'amplification électronique toujours plus complexe.
- En revenant sur la figure 1, on remarque que l'assise du sujet doit être aménagée d'une certaine manière par suite du mouvement de verticalisation et déterminée selon la conformation qu'il est nécessaire d'obtenir pour assurer le confort du patient,
- A cet effet et en premier lieu, un dosseret confortable 60 logé entre les montants 3 et 4 et fixé à ces derniers par des pattes 61, autorise néanmoins le mouvement de déplacement du support de levage 34.
- En deuxième lieu, l'assise du siège comporte deux parties; l'une fixe constituée par un redan arrondi 62 ménagé dans la partie inférieure du dosseret 60 l'autre, mobile 63 articulée sur les éléments latéraux de la structure porteuse 1. Cette partie mobile autour de l'axe 64 constitue l'assise sous-cuissarde du patient lorsqu'elle est en position horizontale, par l'action d'un ressort approprié 65 et d'un mécanisme de verrouillage adapté(non représenté)agissant sur les parties latérales de la structure porteuse 1.
- L'abattement de la partie mobile 63 est obtenu par l'action d'un cable 66 passant sur une poulie 67 et ensuite lié, d'une part,à un point 68 du support 34 et d'autre part, à un autre point 69 de la partie mobile 63.
- Il est à noter que le C de Gqui recule légérement lors de la verticalisation, va permettre la mise en appui convenable du fessier contre le redan 62 assurant de la sorte un confort sécurisant pour le patient.

- En position assise le patient a les pieds posés sur les repose-pieds 8G (et 9D) qui s'escamotent par pivotement latéral selon la flèche H de la figure 1. Ce pivotement est obtenu par de petits motoréducteurs électriques (no n représentés) dont l'action est coordonnée avec la verticalisation. les commandes manuelles sont par ailleurs disposées sur le boîtier 70 positionné sur le repose bras de la structure 1.
- La verticalisation proprement dite peut maintenant être exposée dans son ensemble essentiellement à l'appui de la figure 1.
- Dans un premier temps, le patient est assis normalement comme cela est montré par les traits mixtes X sur la figure 1.
- Selon cette position, les appuis d'aisselles 5-6 sont abaissés et encastrés à l'intérieur des montants 3-4. Le support 34 est en position basse et l'appui sous-cuissard 62 est verrouillé tandis que les jambes sont en appui sur leur repose-pieds escamotable 8-9.
- Selon l'usage, le patient peut se diriger par action sur la commande manuelle 70 en agissant sur les motoréducteurs de traction 19 et/ou 20. On pourrait également faire diriger le handicapé par un assistant par le fait que les motoréducteurs sont montés "à friction".
- Dans un deuxième temps, le patient provoque lui-même l'opération de verticalisation proprement dite en agissant sur la commande appropriée du boîtier 70.
- Conjointement, s'opèrent alors:
- la montée du vérin de levage 14 et la sortie progressive des appuis d'aisselles 5-6 qui viennent doucement prendre le patient sous les aisselles,
- l'abaissement de l'appui sous-cuissard 62,
- l'escamotage latéral des repose-pieds 8-9. - La coordination de tous ces mouvements est telle que toutes les séquences s'effectuent en douceur sans brusquerie et selon des cycles prédéterminés prenant en compte les temps de pose nécessaires au rétablissement du système circulatoire.
- Pendant cette opération de verticalisation, l'assiette est constamment assurée automatiquement. Pendant la verticalisation les pieds du patient pendent sans prendre appui sur le sol (selon Y) assurant une suspension totale qui peut permettre un éventuel déplacement du fauteuil. Il est toutefois certain qu'un tel déplacement debout est préférable sur un sol lisse et sans obstacle. par suite de l'accroissement du moment de renversement résultant de la verticalisation;
- L'opération inverse de dé-verticalisation s'effectue en sens contraire de telle sorte que le patient se retrouve dans la position assise initiale en respectant la encore les temps de pose requis.
- Bien entendu il serait tout à fait possible d'adapter un système de commande de verticalisation et de conduite fonctionnant à la voix pour les handicapés profonds n'ayant pas l'usage de leurs membres.
- les vérins mis en oeuvre peuvent étre du type à billes pour celui de levage 14 et pris dans ceux du commerce pour le levage des véhicules pour ceux de roulis 28 et de tangage 29. Ces vérins sont électriques et alimentés par la batterie 21 et peuvent être commandés manuellement en cas de besoin par les manivelles 71-72-73.
- L'adaptation du fauteuil à diverses morphologies est assurée par le positionnement convenable des axes 45G (et 46D) des appuis d'aisselles 5G (et 6D) sur des trous prédéterminés 47a.,. 48a... dans le montant 3G (et 4D). Corrélativement, la course du vérin de levage 14 est réglée par des interrupteurs fin de course (non représentés). De même, la longueur du cable 66 est aménagée ainsi que sont réglés à hauteur les reposes-pieds 8-9.
- Il est à noter que l'encombrement du présent fauteuil est aux normes en usage à savoir: longueur L ÷ 125 cm, largeur l ÷ 75 cm et hauteur h du sol aux genoux ÷ 65 cm.Le fauteuil est en outre trés stable en raison de la position basse de son centre de gravité qui est situé par ailleurs dans le voisin age immédiat du centre du polygone de sustentation constitué par les points de contact au sol des roues et des roulettes.
- Le fauteuil tel que décrit comporte exclusivement pour la seule translation,des éléments moteurs classiques tels que roues et roulettes rencontrées dans différents autres modèles et ceci n'entre pas dans le champ de l'invention.
- Par contre, l'inconvénient classique connu porté à l'encontre de tels fauteuils à roues et roulettes est bien leur inaptitude à franchir certains obstacles tels les escaliers à fortiori lorsque ceux-ci sont courbes.
- Le problème est difficile et douloureux car il s'agit de tout un champ exploratoire qui reste interdit à ceux qui ont perdu l'usage de leurs jambes.
- L'invention propose donc dans un deuxième temps,une adaptation du fauteuil tel que précedemment décrit qui met en oeuvre un jeu de chenilles conformées et disposées de manière particulière au problème posé.
- Si l'on se re-porte maintenant aux figures 5 à 9 ,on peut voir comment une telle adaptation peut s'effectuer dans la pratique.
- Il faut tout d'abord considérer que pendant la translation par chenilles, la verticalisation n'est pas souhaitable en raison des sensations de perte d'équilibre que ressentira alors le patient,
- L'adaptation dont il est fait état résulte du fait que d'une part,on substitue aux roues 10 et 11 des pignons pour courroies crantées 74G (et 75D) (voir aussi fig. 4) et que l'on adjoint au cadre externe 12 des supports avant 76G (et 77D) et arrière 78G (et 79D).
- Une telle adaptation ne pose pas de problème particulier si elle a été prévue notamment par la présence de trous prédisposés 80... et de compatibilité des axes.
- Le système à chenilles préconisé comporte essentiellement comme cela est particulièrement visible sur la figure 7,un jeu de chenilles avant 81G (et 82D) et un jeu de chenilles arrières 83G (et 84D) articulées sur des supports comme cela va être exposé maintenant.
- Les axes arrières ont tourillonnés sur les supports 78-79 et reçoivent des pignons 85G (et 86D) pour courroies crantées 87-88 et ils portent les roues porte-chenilles 89G (et 90D) ainsi que l'une des parties extrèmes d'un support en U 91G (et 92D).
- l'autre extrémité du support 91G (et 92D) porte un autre axe traversant 93G (et 94D) supportant de part et d'autre des roues de support de chenilles internes 95G (et 96D) et externes 97G (et 98D). les chenilles externes 99G (et 100D) enveloppent les roues 90-98 avec leurs propres moyens d'adhérence (crantage par exemple) et un pliage externe 101G (et 102D) du U permet d'assurer un frottement d'appui interne aux chenilles qui sont bien entendu en une matière caoutchouteuse.
- On voit de la sorte que la motricité des chenilles arrières est obtenue à partir des courroies crantées 87G (et 88D) attaquant leurs pignons respectifs et que leur débattement est permis autour des axes arrières selon le rayon R1.
- Les chenilles avant 103G (et 104D) entourrent: les roues de chenilles 95-96 et d'autres roues avant 105 G (et 106D) portant des axes 107G (et 108D) tourillonnés vers l'avant sur des U 109G (et 110D)eux-mêmes tourillonnés sur les axes 93-94.
- De même un pliage interne 111G (et 112D) peut assurer un frottement interne d'appui aux chenilles qui sont de même constituées en une matière caoutchouteuse.
- Là encore, la rotation selon R2 peut s'effectuer autour des axes 107-108 qui doivent, bien entendu et pour des raisons de pure géométrie, être montés dans des ouvertures oblongues 113G (et 114D) prévues sur les supports 76-77.
- On peut constater qu'avec un tel ensemble:
- les chenilles sont toutes motrices et leur motricité est assurée par les jeux de courroies crantées 81-82-83-84. On peut donc guider le fauteuil par blocage d'un jeu de chenilles comme cela est connu dans la pratique.
- les chenilles peuvent se débattre autour de leurs axes selon R1 ou R2 vers le haut ou vers le bas ce qui autorise bien le franchissement des obstacles.
- les appuis sont constamment assurés par la présence des profilés en U permettant le frottement d'appui des chenilles;
- lee efforts sont bien reportés pr les supports 76-77 et 78-79 sur le cadre externe 12 qui assure par ailleurs la conservation de l'assiette du fauteuil comme indiqué précedemment. - Il est à noter que pour être en mesure d'absorber correctement les obstacles, les chenilles doivent tendre à se trouver dans la position basse c'est à dire selon B porté au dessin selon figure 6. pour ce faire et comme cela est montré en détail sur la figure 9, un ressort spirale 115G (et 116D) est monté sur chaque axe 93-94 en venant s'agripper sur les flancs latéraux des supports 92-110 et 91-109.
- A partir de la description qui précéde, on peut voir à l'appui de la figure 5 que le franchissement d'obstacles réputés difficiles tels que des escaliers droits ou courbes ne doit plus poser de problèmes particuliers dans la mesure bien entendu où le débattement du fauteuil peut être assuré et que la pente de l'escalier reste raisonnable.
- On voit en effet que sur commande du patient les jeux de chenilles avant 81-82 vont tout d'abord,à partir du terrain plat, attaquer la première marche et gravir ensuite les autres marches en se mettant selon l'inclinaison de l'escalier.
- lorsque l'escalier est courbe, les deux inclinaisons vont se trouver différentes ce qui fait que le cadre externe 12 va lui même se trouver selon une inclinaison gauche, la plus défavorable, ce que va immédiatement venir corriger l'action des vé rins de roulis 28 et de tangage 29 commandés par le détecteur d'assiette 59.
- Les chenilles ayant des crans à empreintes suffisantes; l'ascencion de l'escalier peut se poursuivre sous l'effet des chenilles arrières qui entrent en action. Il est à noter que le "plaquage" des chenilles sur l'arête des marches est constamment assuré par le fait de l'action des ressorts 115-116 qui tendent à ramener les chenilles dans la configuration selon B de la figure 6.
- La dernière marche est franchie tandis que les jeux de chenilles avant 81-82 vont se trouver alors dans la configuration selon la figure 5; l'assiette étant toujours conservée et le centre de gravité reste constamment à l'intérieur du polygone de sustentation constitué par les points extrèmes d'appuis des chenilles sur le sol.
- L'arrivée sur le terrain plat supérieur est assurée dans des conditions similaires à celles du début de franchissement de la première marche; l'assiette étant toujours conservée.
- La présente description n'a été faite que pour bien faire comprendre les bases de l'invention consistant essentiellement à fournir à un handicapé majeur les moyens de se verticaliser lui même par prise d'appui sous les aisselles et pour assurer par ses propres moyens le franchissement d'obstacles réputés difficiles que sont des escaliers droits ou à fortiori courbes par exemple.
- Il est bien évident que toutes modifications et/ou adaptations qui seraient apportées à l'invention dans son esprit resteraient dans son cadre; lequel cadre est défini dans les revendications qui suivent.
Claims (6)
1 -/ Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique caractérisé en ce qu'il comporte:
- une structure rigide (1) portant deux montants (3-4) recevannt en glissement un support (34) animé en translation par un vérin de levage (14), deux mécanismes escamotables d'appuis d'aisselles (5-6), un appui sous-cuissard rabattable (63) avec son mécanisme de pivotement et de verrouillage, un dosseret (60) avec redan (62) d'appui fessier, un appui-coude portant le boîtier de commande(70) , deux repose-pieds pivotants (8-9), un cadre interne (2) constituant l'un des éléments d'un système à la cardan comprenant un cadre intermédiaire (13) un cadre externe (12) et leurs pivots d'articulation (55-56-57-58),
- un vérin électrique anti-rouli (28) et un vérin électrique anti-tangage (29) avec leurs système à rotules(30-31-32-33) disposés entre le cadre interne(2) et le cadre externe (12),
- un détecteur d'assiette(59) lié à la structure rigide(1) et commandant les vérins anti-roulis (28) et anti-tangage (29)
- un système de déplacement automoteur comportant: soit des roues (10-11-26-27) dont deux sont rendues motrices par des motoréducteurs (19-20) ; soit des jeux de chenilles (81-82-83-84) et l'adaptation de l'une à l'autre de ces formules s'effectue aisèment par le fait de pignons(74-75-85-86)à axes adaptés avec supports amovibles (76-77-78-79)et fixations adaptées(80...) et de courroies crantées (87-88) disposées sur lesdits pignons,
- une batterie(21) pour l'alimentation électrique générale, l'agencement de ces divers éléments étant tel que sur ordre du patient, celui-ci peut procéder à sa verticalisation ce qui entraîne conjointement, une sortie des appuis d'aisselles coordonnée avec un abaissement de l'appui sous-cuissard et un escamotage latéral des repose-pieds et/ou produire le déplacement de son fauteuil par action sur les roues lorsque cedit fauteuil est équipé desdites roues ou par actions sur les chenilles lorsque cedit fauteuil est équipé desdites chenilles.
- une structure rigide (1) portant deux montants (3-4) recevannt en glissement un support (34) animé en translation par un vérin de levage (14), deux mécanismes escamotables d'appuis d'aisselles (5-6), un appui sous-cuissard rabattable (63) avec son mécanisme de pivotement et de verrouillage, un dosseret (60) avec redan (62) d'appui fessier, un appui-coude portant le boîtier de commande(70) , deux repose-pieds pivotants (8-9), un cadre interne (2) constituant l'un des éléments d'un système à la cardan comprenant un cadre intermédiaire (13) un cadre externe (12) et leurs pivots d'articulation (55-56-57-58),
- un vérin électrique anti-rouli (28) et un vérin électrique anti-tangage (29) avec leurs système à rotules(30-31-32-33) disposés entre le cadre interne(2) et le cadre externe (12),
- un détecteur d'assiette(59) lié à la structure rigide(1) et commandant les vérins anti-roulis (28) et anti-tangage (29)
- un système de déplacement automoteur comportant: soit des roues (10-11-26-27) dont deux sont rendues motrices par des motoréducteurs (19-20) ; soit des jeux de chenilles (81-82-83-84) et l'adaptation de l'une à l'autre de ces formules s'effectue aisèment par le fait de pignons(74-75-85-86)à axes adaptés avec supports amovibles (76-77-78-79)et fixations adaptées(80...) et de courroies crantées (87-88) disposées sur lesdits pignons,
- une batterie(21) pour l'alimentation électrique générale, l'agencement de ces divers éléments étant tel que sur ordre du patient, celui-ci peut procéder à sa verticalisation ce qui entraîne conjointement, une sortie des appuis d'aisselles coordonnée avec un abaissement de l'appui sous-cuissard et un escamotage latéral des repose-pieds et/ou produire le déplacement de son fauteuil par action sur les roues lorsque cedit fauteuil est équipé desdites roues ou par actions sur les chenilles lorsque cedit fauteuil est équipé desdites chenilles.
2 -/ Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique selon la revendication1 caractérisé en ce que le mécanisme d'appuis d'aisselles (5-6) comporte sur les pattes (35-36) du support de levage (34) deux axes d'articulation (37-38) et de liaison aux appuis qui comportent en feuillure des chappes (41-42) sur les axes (39-40); lesdites chappes constituant un dispositif avec ressorts de compression (49-50)articulé selon l'autre extrémité par d'autres chappes (45-46) liées par les axes (47-48) aux montants (3-4) ; l'agencement de ces éléments étant tel que la montée du support (34) entraîne corrélativement une sortie des appuis d'aisselles (flèche F) et ladite sortie est rendue souple grâce à la présence des ressorts.
3 -/ Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique selon la revendication 1 caractérisé en ce que l'appui sous-cuissard rabattable (63) comporte un axe d'articulation (64) dudit appui, un ressort spirale (63) sur ledit axe ramenant systèmatiquement l'appui en position d'assise, un point d'ancrage (69) d'un cable (66) passant sur une poulie (67) et ancré en son autre extrémité sur un autre point (68) lié au support (34), un système de verrouillage autodébrayable de l'appui sur les montants latéraux; l'agencemant de ces éléments étant tel que lors de l'entrée en action du vérin de levage (14) il se produit conjointement : un déverrouillage de l'appui sur les montants latéraux et un abaissemnet de cet appui sous l'effet de la traction du cable(66) entraîné par le mouvement du support (34); le mouvement inverse entranant une remise en position d'assise puis un reverrouillage de l'appui sous-cuissard;
4 -/ Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique selon la revendication 1 caractérisé en ce que l'équipement avec chenilles comporte deux supports avant amovibles (76-77) deux supports arrières amovibles (78-79) et sur ces supports sont axés deux jeux de chenilles vers l'arrière (84-85) et deux jeux de chenilles vers l'avant (81-82) ; lesdits jeux de chenilles arrières comprenant chacun;d'une part un axe lié aux supports et recevant en pivotement chacun, un pignon(85-86), la roue de chenille (89-90),l'extrémité du support en U (91-92) et d'autre part lié à l'autre extrémité dudit support en U (91-92), un axe de pivotement (93-94) lui même lié d'un coté à une première roue de chenille (97-98) et d'un autre coté à une deuxième roue de chenille (95-96) tandis qu'un deuxième support en U (109-110) axé d'une part sur ledit axe de pivotement (93-94) reçoit un axe (107-108) lié à une roue de chenille (105-106) ledit axe étant logé dans des ouvertures oblongues du support avant (77-78) et des chenilles crantées enserrent à l'arrière les roues de chenilles (89-90 et 97-98) et à l'avant les roues de chenilles (95-96 et 105-106).
5 -/ Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique selon la revendication 1 caractérisé en ce que le boîtier de commande est soit à la disposition du patient sur l'accoudoir soit selon une conformation appropriée pour le fonctionnement à la voix.
6 -/ Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique selon la revendication 4 caractérisé en ce que les supports en U (91-92) et (109-110) comportent une pliure vers l'intérieur des chenilles afin d'assurer l'appui de ces dernières et leur jonction sur l'axe commun (93-94) comporte l'aménagement d'un ressort spirale (115-116) dont les extrémités sont fixées sur leur flanc de maniére à assurer une conformation basse (B) aux jeux de chenilles.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8517086 | 1985-11-19 | ||
| FR8517086A FR2590162B1 (fr) | 1985-11-19 | 1985-11-19 | Fauteuil automoteur pour handicape comportant un dispositif de verticalisation automatique |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP0226489A1 true EP0226489A1 (fr) | 1987-06-24 |
Family
ID=9324957
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP86402478A Withdrawn EP0226489A1 (fr) | 1985-11-19 | 1986-11-05 | Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0226489A1 (fr) |
| FR (1) | FR2590162B1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3943260A1 (de) * | 1989-12-29 | 1991-07-04 | Kurt Lennartz | Vorrichtung an fahrzeugen zur ueberwindung von fahrhindernissen |
| GB2260896A (en) * | 1991-10-29 | 1993-05-05 | Clive John Hussey | Back support aid |
| EP0839705A3 (fr) * | 1996-10-29 | 1998-07-08 | Sunwa Ltd. | Véhicule pour faire monter un escalier à un fauteuil roulant |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2618066B1 (fr) * | 1987-07-16 | 1989-12-15 | Rolland Bruno | Fauteuil automoteur pour handicape avec dispositif de verticalisation automatique |
| FR2979230B1 (fr) * | 2011-08-24 | 2014-07-11 | Bruno Rolland | Fauteuil automoteur pour personne handicapee |
| EP2722028A1 (fr) * | 2012-10-19 | 2014-04-23 | Bruno Rolland | Fauteuil automoteur pour personne handicapée |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3137869A (en) * | 1962-05-18 | 1964-06-23 | Lenard W Johnson | Wheel chair with power lift means |
| CH389827A (de) * | 1962-04-26 | 1965-03-31 | Greub Werner | Treppensteigender Rollstuhl |
| US3394933A (en) * | 1966-04-28 | 1968-07-30 | Suburban Mfg Corp Inc | Invalid lifting and supporting device |
| US4044850A (en) * | 1975-04-14 | 1977-08-30 | Winsor Malcolm C | Wheelchair |
| US4375840A (en) * | 1981-09-23 | 1983-03-08 | Campbell Jack L | Mobile support |
| DE3150193A1 (de) * | 1981-12-18 | 1983-06-30 | Rettungsdienst Stiftung Björn Steiger e.V., 7057 Winnenden | Motorgetriebener rollstuhl fuer koerperbehinderte |
-
1985
- 1985-11-19 FR FR8517086A patent/FR2590162B1/fr not_active Expired
-
1986
- 1986-11-05 EP EP86402478A patent/EP0226489A1/fr not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH389827A (de) * | 1962-04-26 | 1965-03-31 | Greub Werner | Treppensteigender Rollstuhl |
| US3137869A (en) * | 1962-05-18 | 1964-06-23 | Lenard W Johnson | Wheel chair with power lift means |
| US3394933A (en) * | 1966-04-28 | 1968-07-30 | Suburban Mfg Corp Inc | Invalid lifting and supporting device |
| US4044850A (en) * | 1975-04-14 | 1977-08-30 | Winsor Malcolm C | Wheelchair |
| US4375840A (en) * | 1981-09-23 | 1983-03-08 | Campbell Jack L | Mobile support |
| DE3150193A1 (de) * | 1981-12-18 | 1983-06-30 | Rettungsdienst Stiftung Björn Steiger e.V., 7057 Winnenden | Motorgetriebener rollstuhl fuer koerperbehinderte |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3943260A1 (de) * | 1989-12-29 | 1991-07-04 | Kurt Lennartz | Vorrichtung an fahrzeugen zur ueberwindung von fahrhindernissen |
| GB2260896A (en) * | 1991-10-29 | 1993-05-05 | Clive John Hussey | Back support aid |
| EP0839705A3 (fr) * | 1996-10-29 | 1998-07-08 | Sunwa Ltd. | Véhicule pour faire monter un escalier à un fauteuil roulant |
| US6158536A (en) * | 1996-10-29 | 2000-12-12 | Sunwa Ltd. | Stair-climbing vehicle for wheelchair |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2590162A1 (fr) | 1987-05-22 |
| FR2590162B1 (fr) | 1988-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2004124B1 (fr) | Fauteuil multipositions pour handicape | |
| EP1864637B1 (fr) | Siege verticalisateur à dossier inclinable | |
| EP2099402B1 (fr) | Lit medicalise a translation laterale | |
| EP0172123A1 (fr) | Dispositif pour déplacer un malade à partir de son lit | |
| EP1996140A2 (fr) | Fauteuil roulant adapte aux escaliers | |
| CN107296695B (zh) | 一种可变形智能爬楼梯轮椅 | |
| WO2016001451A1 (fr) | Vehicule comprenant un fauteuil articule comprenant un mecanisme de verticalisation | |
| KR102080917B1 (ko) | 전동 휠체어 | |
| EP0146660B1 (fr) | Dispositif élévateur pour fauteuil roulant et fauteuil roulant en faisant application | |
| EP0226489A1 (fr) | Fauteuil automoteur pour handicapé comportant un dispositif de verticalisation automatique | |
| CN213311003U (zh) | 一种轮椅 | |
| EP1488770B1 (fr) | Fauteuil verticalisateur à modification automatique de l'inclinaison du dossier | |
| EP0720467B1 (fr) | Lit medicalise a geometrie variable | |
| EP2722028A1 (fr) | Fauteuil automoteur pour personne handicapée | |
| FR2515508A1 (fr) | Fauteuil motorise permettant une assistance au levage | |
| CN2920205Y (zh) | 椅背可平置的传送带式轮椅 | |
| KR100626399B1 (ko) | 높이 조절 기능이 구비된 착탈식 휠체어 | |
| EP0880348A1 (fr) | Fauteuil elevateur motorise | |
| EP0495862B1 (fr) | Leve-malade | |
| EP0547195B1 (fr) | Dispositif d'assistance pour la manipulation de malades grabataires | |
| FR2915091A1 (fr) | Fauteuil verticalisateur a garde au sol du repose-pied variable | |
| FR2979230A1 (fr) | Fauteuil automoteur pour personne handicapee | |
| FR2513512A1 (fr) | Lit multifonctionnel pour handicape | |
| FR3155131A1 (fr) | Lit mécanisé avec une potence pour le déplacement du patient | |
| FR2589341A1 (fr) | Dispositif permettant a une personne handicapee en position assise sur un fauteuil de se degager du siege dudit fauteuil |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH DE FR GB IT LI LU NL SE |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 19871229 |