EP2505177A1 - Massagegerät zur Druck-und Streichmassage - Google Patents
Massagegerät zur Druck-und Streichmassage Download PDFInfo
- Publication number
- EP2505177A1 EP2505177A1 EP12002102A EP12002102A EP2505177A1 EP 2505177 A1 EP2505177 A1 EP 2505177A1 EP 12002102 A EP12002102 A EP 12002102A EP 12002102 A EP12002102 A EP 12002102A EP 2505177 A1 EP2505177 A1 EP 2505177A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- massage
- drum
- pressure
- tissue
- elliptical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 56
- 238000006073 displacement reaction Methods 0.000 claims abstract description 12
- 238000000034 method Methods 0.000 claims abstract description 8
- 241001465754 Metazoa Species 0.000 claims abstract description 5
- 230000000284 resting effect Effects 0.000 claims description 3
- 230000001680 brushing effect Effects 0.000 claims 1
- 239000004744 fabric Substances 0.000 claims 1
- 230000006835 compression Effects 0.000 abstract 2
- 238000007906 compression Methods 0.000 abstract 2
- 210000001519 tissue Anatomy 0.000 description 24
- 239000013598 vector Substances 0.000 description 15
- 210000003205 muscle Anatomy 0.000 description 9
- 230000000694 effects Effects 0.000 description 6
- 229920001971 elastomer Polymers 0.000 description 6
- 238000002560 therapeutic procedure Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 230000015572 biosynthetic process Effects 0.000 description 4
- 230000001926 lymphatic effect Effects 0.000 description 4
- 208000027418 Wounds and injury Diseases 0.000 description 3
- 239000000872 buffer Substances 0.000 description 3
- 230000006378 damage Effects 0.000 description 3
- 201000010099 disease Diseases 0.000 description 3
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 3
- 238000011049 filling Methods 0.000 description 3
- 208000014674 injury Diseases 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- 230000000638 stimulation Effects 0.000 description 3
- 208000035484 Cellulite Diseases 0.000 description 2
- 206010028331 Muscle rupture Diseases 0.000 description 2
- 206010049752 Peau d'orange Diseases 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 230000036232 cellulite Effects 0.000 description 2
- 210000003169 central nervous system Anatomy 0.000 description 2
- 239000006263 elastomeric foam Substances 0.000 description 2
- 238000004898 kneading Methods 0.000 description 2
- 239000006210 lotion Substances 0.000 description 2
- 210000001087 myotubule Anatomy 0.000 description 2
- 230000002232 neuromuscular Effects 0.000 description 2
- 235000015097 nutrients Nutrition 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 238000000746 purification Methods 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 238000003892 spreading Methods 0.000 description 2
- 230000007480 spreading Effects 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000005728 strengthening Methods 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 210000002435 tendon Anatomy 0.000 description 2
- 241001136792 Alle Species 0.000 description 1
- 208000034656 Contusions Diseases 0.000 description 1
- 241001295925 Gegenes Species 0.000 description 1
- 238000006229 Nazarov cyclization reaction Methods 0.000 description 1
- 229920005830 Polyurethane Foam Polymers 0.000 description 1
- 208000005392 Spasm Diseases 0.000 description 1
- 208000010040 Sprains and Strains Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 230000010478 bone regeneration Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000004087 circulation Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000006071 cream Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000001627 detrimental effect Effects 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 210000003746 feather Anatomy 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000007794 irritation Effects 0.000 description 1
- 239000002655 kraft paper Substances 0.000 description 1
- 210000002751 lymph Anatomy 0.000 description 1
- 210000004324 lymphatic system Anatomy 0.000 description 1
- 210000001365 lymphatic vessel Anatomy 0.000 description 1
- 210000001161 mammalian embryo Anatomy 0.000 description 1
- 210000000412 mechanoreceptor Anatomy 0.000 description 1
- 108091008704 mechanoreceptors Proteins 0.000 description 1
- 230000004060 metabolic process Effects 0.000 description 1
- 230000004973 motor coordination Effects 0.000 description 1
- 230000003387 muscular Effects 0.000 description 1
- 239000002674 ointment Substances 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 230000003534 oscillatory effect Effects 0.000 description 1
- 206010033675 panniculitis Diseases 0.000 description 1
- 238000000554 physical therapy Methods 0.000 description 1
- 239000011496 polyurethane foam Substances 0.000 description 1
- 230000002980 postoperative effect Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 108020003175 receptors Proteins 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 231100000241 scar Toxicity 0.000 description 1
- 230000005808 skin problem Effects 0.000 description 1
- 210000004304 subcutaneous tissue Anatomy 0.000 description 1
- 238000010408 sweeping Methods 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H7/00—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for
- A61H7/002—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for by rubbing or brushing
- A61H7/004—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for by rubbing or brushing power-driven, e.g. electrical
- A61H7/005—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for by rubbing or brushing power-driven, e.g. electrical hand-held
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D34/00—Containers or accessories specially adapted for handling liquid toiletry or cosmetic substances, e.g. perfumes
- A45D34/04—Appliances specially adapted for applying liquid, e.g. using roller or ball
- A45D34/041—Appliances specially adapted for applying liquid, e.g. using roller or ball using a roller, a disc or a ball
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H7/00—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for
- A61H7/001—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for without substantial movement between the skin and the device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H7/00—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for
- A61H7/002—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for by rubbing or brushing
- A61H7/004—Devices for suction-kneading massage; Devices for massaging the skin by rubbing or brushing not otherwise provided for by rubbing or brushing power-driven, e.g. electrical
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H15/00—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains
- A61H2015/0007—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains with balls or rollers rotating about their own axis
- A61H2015/0014—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains with balls or rollers rotating about their own axis cylinder-like, i.e. rollers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H15/00—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains
- A61H2015/0071—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains with balls or rollers having built-in vibrating means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
- A61H2201/0176—By stopping operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/10—Characteristics of apparatus not provided for in the preceding codes with further special therapeutic means, e.g. electrotherapy, magneto therapy or radiation therapy, chromo therapy, infrared or ultraviolet therapy
- A61H2201/105—Characteristics of apparatus not provided for in the preceding codes with further special therapeutic means, e.g. electrotherapy, magneto therapy or radiation therapy, chromo therapy, infrared or ultraviolet therapy with means for delivering media, e.g. drugs or cosmetics
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
- A61H2201/1215—Rotary drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1418—Cam
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1436—Special crank assembly
Definitions
- the invention relates to a massage device for pressure and stroking massage of the human and animal tissue according to the preamble of claim 1.
- Such a massager is with the DE 299 11 555 U1 known. It consists of two vertically spaced superposed, rotationally driven waves on which a number of massage and kneading rollers are rotatably arranged.
- the massage and kneading rollers are only suitable for exercising a tapping massage and can not perform overlapping pressure and strokes on the tissue to be treated.
- the invention relates both to massagers, which are designed as a stand-alone device, as well as hand-held massagers.
- Such massage devices are known and consist essentially of a massage body, which is rotatably driven or performs oscillating rotational movements about a fixed axis of rotation.
- the surface of the massage body is placed on a specific body site to be treated and by pressing the massage body, the reciprocating movements are registered by the surface of the massage body on the body site to be treated.
- lymphatic drainage it is important that first of all a pressure directed into the depth of the tissue part-ie, approximately normal to the skin surface-is directed to the lymphatic vessel to be treated, and then while maintaining this pressure, an embryo movement is performed, which is directed approximately parallel to the skin surface.
- this particular pressure and stroke does not succeed with a rotating oscillating massage body after the DE 299 18 677 U1 or the EP 0 978 269 B1 , In the known massagers, therefore, the treatment effect is poor. In addition, such torsional vibrations are perceived as hard and unpleasant.
- the invention is therefore based on the object not only to effect a pressure massage on a part of the body to be treated, but in addition to the pressure also to allow a stroke massage, which comes close to the massage effect of lymphatic drainage.
- the invention is characterized in that the massage body performs an elliptical pressure and pulling movement on the body part to be treated.
- lymphatic drainage By circular or elliptical displacement techniques in the context of the present invention, which are applied with light pressure, liquid is to be moved from the tissue into the lymphatic system.
- the applied here Lymph drainage has a predominant effect on the skin and subcutaneous tissue and should not cause any excess circulation, as in classical massage. Further indications are all orthopedic and traumatological diseases, which are accompanied by a swelling (dislocations, strains, sprains, torn muscle fibers, etc.) Also in case of burns, whiplash, Sudeck's disease and similar diseases, the lymphatic drainage according to the invention is used.
- a defined pressure and stroke movement of the driven massage body in the depth (normal to the skin surface) and length (parallel to the skin surface) of the tissue, the frequency of the coating movement is variable within wide limits.
- the frequency of the sweeping movement is in the range between 5 hertz and 40 hertz.
- the biomechanical stimulation according to the invention is a proven method for years in therapy, rehabilitation, regeneration and prevention.
- general physiotherapy postoperative treatment, neuromuscular problems (MS, Parkinson's, spasm) and pain therapy, short-term success can be achieved.
- MS neuromuscular problems
- Parkinson's, spasm neuromuscular problems
- pain therapy short-term success can be achieved.
- the BISA is a method without stimulation current and chemical substances. It relies on the transmission of mechanical vibration of defined amplitude and frequencies to the neuromuscular system.
- the muscle length change shapes the muscle and changes the width of the blood vessels, which increases the blood pumping function of the muscles. It also affects the mechanoreceptors and thus the central nervous system.
- the massage device according to the invention is suitable for therapy, prevention, sports and elite sports and transmits mechanical vibrations targeted at problem areas. Muscle and tendon shortening, but also pain is quickly reduced and loosened bonds.
- the application is also fresh Injuries, such as Bruises, strains, torn muscle fibers, adductor problems, etc.
- the invention helps to increase the training efficiency many times. Very positive, the training also affects the mobility. In the case of injuries, the early use of BISA can be expected to significantly shorten the rehabilitation time.
- the massager offers a very wide range of treatment options.
- the increased blood exchange in the body leads to an improved supply with oxygen and nutrients, to an acceleration of the metabolism and to the muscle building.
- the vessels are cleaned by dissolving deposits and old tissue.
- the present invention relates both to the design of the massager as a stand-alone device, but also to the formation of a massaging device as a hand-held device, wherein it is important that the massage body executes the said elliptical pressure and tension massage on the tissue to be treated, both in the case of the stationary device and in the case of the hand-held device.
- a hand-held device has only one, elliptical pressure and strokes exporting, massage body to the object, which has about 25 to 40 mm in width and length and which is preferably cylindrical.
- the drive motor for the massage body is not arranged in the massage body itself, but outside in the handle.
- the massage body is formed as a cylindrical, padded body, the surface of which can be applied to the tissue to be treated, so as to enter via the surface of the pressure and stroke on the tissue to be treated.
- the invention is not limited to the formation of a cylindrical massage body.
- the massage body may also be oval, it may be polygonal, it may be pear-shaped, it may be spherical and the like more.
- the surface of the massage body is either hard or padded.
- the otherwise non-permeable surface of the massage body may be perforated (permeable) and on the inside of a depot, in which a lotion, an ointment or a liquid is filled, in the execution of the pressure and stroke massage on the tissue to be treated is registered.
- massage body which performs elliptical stroking and pulling movements
- massaging drum is referred to below as a round-cylindrical massage body. This, however, only to simplify the description.
- the massage device in a preferred embodiment of the massage device according to the invention as a stand-up device, this consists essentially of an upright foot housing, which is connected in the manner of a stand on the bottom side with a base plate and at the upper free end of a pivot axis for the rotational support of a pivotally held there pivot arm is arranged.
- the massage drum At the free front end of the swing arm, the massage drum is arranged, which performs the claimed elliptical (pressure and stroke) movements.
- the massage drum is rotatably arranged at the front end of the swivel arm to ensure that with the rotation of the massage drum any surface points on the surface of the massage drum can be brought into engagement with the tissue to be treated.
- vibration drive for the elliptical movement curve of the massage drum is arranged in the interior of the massage drum.
- the massage drum is designed as a hand-held device, and it is then not necessary to make the massage drum itself rotatable. This is then replaced by the rotation of the hand, which twists the housing to an optimal rotational position for the treatment.
- Characteristic of the present invention is the according to that the surface of the massage drum at different surface areas also performs different elliptical movements with different longitudinal and transverse components.
- the massage drum is rotatably mounted on the front free end of the pivoting arm of the state machine to bring each point on the surface of the massage drum in corresponding engagement with the tissue to be treated, depending on the rotational position of the massage drum, this point more exerts a pressure massage , with a reduced component of the prank massage, or vice versa, an enlarged component of the prank massage with a reduced component of the pressure massage.
- the massage drum is rotatable to bring any points on the surface of the massage drum in engagement with the resting on this selected point of the massage drum to be treated tissue.
- the massage drum is arranged at the free pivotable end of the aforementioned pivot arm, so that when pivoting the pivot arm, z. B. in a vertical position, it is possible to bring the massage drum in the neck area of a person to be treated, standing.
- the pivot arm can be swung out, for example, to be brought into a horizontal position, so as to arrange the massage drum relatively close to the ground, in order z.
- the pivot arm is formed automatically pivotable in certain areas in order to allow a wandering of the elliptical strokes exporting, massage drum over larger body parts.
- the elliptical movement drive of the massage drum via at least two mutually arranged at an angle connecting rod, which are mounted eccentrically with their foot-side ends on a rotatably arranged drive.
- an eccentric, controlled by connecting rod elliptical displacement movement is exerted on the outer circumference of the massage drum, in a preferred embodiment of the present invention, the Pleuel Gay is supported via radially biased springs to prevent self-locking of the connecting rods arranged at an angle to each other.
- the positively controlled - run without the interposition of spring members - a defined elliptical displacement movement of the shell of the massage drum. Because the displaceable in the axial direction of the connecting rod ends directly engage the lateral surface of the massage drum, it is a direct displacement drive of the massage drum in the radial direction, without elastic spring elements are turned on in this drive chain. This avoids that increases in amplitude of the elliptical oscillation frequency whose amplitude.
- the invention is not limited to an eccentric drive of radially arranged connecting rods, wherein at least two connecting rods arranged at an angle to one another are present.
- an eccentric rotary drive is arranged, which, for example. is designed as a rotary motor.
- the driven, coiled rotor rolls on the with an also helically coiled inside of the housing, the stator, from, and doing with his character axis an eccentric rotational movement about the stator.
- the elastically formed massage drum thus forms the stator axis and is radially expanded on its lateral surface by the rotor rotating inside.
- another embodiment of the present invention is not limited to an eccentric connecting rod drive, but all other eccentric drives can be used, as they are known with eccentric rotary motors (see above).
- the connecting rods work in two directions at an angle to each other, the directions are preferably 90 degrees.
- the other connecting rod also shifts by a different displacement path so that each point on the outer circumference of the drum located exactly on the connecting rod axis makes an eccentric motion curve.
- Such a hand-held device has the advantage that a very compact and little space-demanding structure is given.
- a handle is directly connected to the one in the stub axle, which in turn is connected to the pipe of the device.
- the bearings do not need to be double stored. It is sufficient to use simple ball bearings or even plain bearings. Therefore, it is possible to form the entire massage body with a total outer diameter of 20 to 30 mm.
- the springs are designed as tension springs.
- the tension springs omitted and instead the interior of the device outside the tube is filled with an elastomeric mass, the z. B. may be formed as a gel filling or as an elastomeric foam.
- an elastomeric foam may for example also be a polyurethane foam.
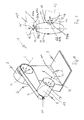
- a massaging device 1 is shown as a standing device, which consists of a foot housing 2, which has at its upper free end a pivot axis 6 for the rotational recording of a pivotally held in the arrow directions 7 there pivot arm 4.
- the foot housing 2 is supported against the ground with a base plate 3, on which the person to be treated sets up, sets or kneels.
- the person to be treated may stand in front of the massaging device 1, wherein it is only crucial that the massage drum 5 arranged at the free, front end of the pivoting arm 4 comes into engagement with the tissue or body part of the person to be treated.
- FIG. 1 Assume that the surface point 17 on the drum surface 19 is to be brought into engagement with a body part to be treated of a person standing in front of the massage drum 5.
- the massage drum 5 is rotatably mounted in the arrow directions 9 about the pivot axis 8 at the front free end of the pivot arm 4, the stop screw 10 only serves once - for this treatment situation - the rotational position of the massage drum 5 to determine the treatment area to adjust to the person to be treated, in which case, for example, the drum surface 19 is brought to the surface point 17 in opposition to the person to be treated. Is this rotational position reached, the stop screw 10 is detected again and the massage drum 5 remains in this position during the entire therapy.
- FIG. 2 is shown schematically how two different body parts 13, 13 'can be treated with different tensile and stroking movements.
- the body part 13 to be treated on the right side of the FIG. 2 acts on this surface point 17 B, a relatively small force vector 16 in the sense of a pressure massage and a relatively strong force vector 15 in the sense of a stroke massage.
- the massage drum 5 is rotated so that, for example, the body part 13 'comes into engagement with the surface of the massage drum - this is in FIG. 2 shown above - it comes back to a displacement zone 66a of the skin until it rests on the surface of the massage drum 5 in the region of the surface point 17a, and in this case it comes to a larger Pressure due to the larger force vector 16 'and a lower strike effect due to the lower force vector 15'.
- a corresponding pressure and stroke movement with different force vectors 15, 16 are formed, wherein the force vectors resulting pressure and stroke movements are adjustable according to the rotational position of the massage drum 5.
- the magnitude of the force vector 15, 15 ' is also dependent on the force with which the skin surface 14 is applied to the outer circumference of the massage drum 5 (drum surface 19).
- FIG. 1 the elliptical movement curve 11 shown in extension 18 of the drum surface 19.
- FIGS. 4 and 5 shows that on one side of the pivot arm 4 security strips 20 are arranged, which are intended for an emergency shutdown of the swing arm 4.
- FIG. 3 shows that any surface point 17 performs on the drum surface 19, the claimed elliptical motion curve 11, which is traversed in the illustrated embodiment in the direction of arrow 12.
- the massage drum 5 is here received at the free front end via a stub axle 35 rotatably mounted on the pivot arm 4.
- FIG. 4 shows the various possible pivoting positions of the pivoting arm 4, which can be pivoted so in the pivoting position 4 'or 4 "or in any intermediate position.As a result, the longitudinal axis 21 of the pivoting arm 4 can be adjusted in rotation.
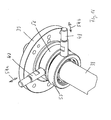
- FIGS. 5 and 6 show the side view and the top view of the pivot arm 4, where it can be seen that an intermediate ring 22 on the pivot bearing is available.
- a drum bearing 24 is provided for the rotational support of the axle stub 35. This is rotatably received in the region of a rotary bearing 25, which is designed as a ball bearing, in the region of radially outer bearing surfaces 26.
- FIG. 6 shows that the stopper screw 10 can fix the rotation of the pivot bearing 25.
- FIG. 6 can be seen that fastening screws 23 for screw fastening of the pivot arm 4 on the pivot bearing 27 in accordance with FIGS. 7 and 8 is determined.
- the pivot bearing 27 has an internal toothing 28, which according to FIG. 8 and the FIGS. 11 to 13 is rotationally driven with a twin worm gear 30.
- the double worm gear 30 consists of a rotationally driven drive pinion 32, which is in rotational engagement with the internal teeth 28.
- the drive pinion 32 is strongly driven by a drive motor 33 driven by a twin-screw drive. In this way, the rotational speed of the drive motor 33 at a very slow speed of the drive pinion 32 of z. B. 8 revolutions per minute.
- FIG. 7 shows that in the interior of the pivot bearing 27 a number of safety switches 29 are arranged to interrupt the rotary drive for the swing arm 4, if necessary.
- a lid 31 is still arranged, behind which the control is arranged for the entire massaging device.
- the mounting plate 34 is fixedly connected to the outer ring of the pivot bearing, wherein the outer ring is fixed to the housing, while the fastening screws 23 are fixedly connected to the pivot arm 4 with the rotatable inner ring of the pivot bearing 27.
- FIGS. 9 and 10 is again shown the pivot bearing 27, where it can be seen that the pinion 32 meshes with the rotatable in the direction of arrows 7 driven inner ring of the rotary bearing 27.
- the internal toothing 28 is arranged on the inner ring.
- the elliptical drive according to the invention with respect to the movement curve 11 of the massage drum 5 is arranged.
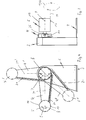
- the stub axle 35 engages in the interior of the massage drum 5 according to the Figures 14 and 15 into and is connected there via a ball bearing 36b.
- the entire massage drum 5 is mounted rotatably and rotationally fixed on the stub axle 35.
- a drive shaft 38 is arranged, which is rotatably received in the ball bearings 36a, 36b.
- a driven gear 41 With which it is rotatably connected. Via the output gear 41 runs a drive belt 42, which is connected to a drive wheel 44 which is driven by a drive motor 43.
- the drive shaft 38 is driven in rotation, for example in the direction of arrow 46.
- the rotational speed of the drive motor 43 is adjustable.
- eccentric sleeves 52, 53 connected via feather keys with the drive shaft 38, and these carry the connecting rod bearings 49, 50, in which the inside ends of pairs of connecting rods 47, 48 begin.
- the drive motor 43 is held in a receiving flange 45.
- the drive shaft 38 is overlapped by an outer cylindrical tube 37, in which associated slots for the passage of the paired connecting rods 47, 48 are provided.
- connecting rod bearings 49, 50 are arranged, which form the inside bearing for the pairs arranged and each offset at an angle to each other and radially outwardly directed connecting rods 47, 48 form.
- the respective connecting rod ring 55, 56 is seated on the drive axle 38 via the aforementioned pivot bearings and carries the connecting rods 47, 48, which are rod-shaped.
- each connecting rod 47, 48 performs an eccentric movement 54, wherein the eccentric 54a is smaller than, for example, the eccentric 54b.
- the eccentric 54a is smaller than, for example, the eccentric 54b.
- a rubber pad 62 is arranged on the outer circumference of the drum shell 63.
- the massaging device 1 shown here is designed as a handheld device, then the arrangement of the drive motor 43 in the interior of the massage drum 5 is omitted and this is instead moved for the rotary drive of the drive shaft 38 in a hand-held handle.
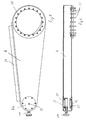
- each helical tension spring 64 is received in a receiving plate 65 in a hinge point arranged there.
- the SSenzugfedern 64 thus exert a spring force on the drum shell 63, which is directed radially inwardly to prevent mutual locking or self-locking of the mutually angled connecting rods 47, 48.
- the drum shell 63 is spring-biased in the radial direction to prevent a loose movement of the connecting rod pairs 47, 48 in the direction of the longitudinal axis.
- the FIG. 17 shows that 5 different movement curves are generated at different surface points on the outer circumference of the massage drum.
- FIG. 18 Further details of the eccentric bearing of the connecting rods on the drive axle 38 are shown. The corresponding parts have already been explained with reference to the above drawings.
- any point on the surface of the massage drum can be brought into an adjustable elliptical motion curve.
- any massage body which is formed only in the embodiment as a massage drum, be implemented in a superimposed longitudinal and transverse movement, so as to perform the desired pressure and stroke massage on the tissue thus treated.
- FIGS. 19 and 20 show the formation of a massaging device as a hand-held device, wherein the same reference numerals apply to the same parts.
- FIG. 19 is shown how a handset can be formed in a first embodiment. It is important that the handle 68 is directly and non-rotatably connected to the axle stub 35, wherein the rotary drive of the drive shaft 38 in the arrow directions 46 is effected by a drive motor, not shown, which is arranged in the handle.
- the drive motor can either be battery operated or powered by a low voltage power supply.
Landscapes
- Health & Medical Sciences (AREA)
- Dermatology (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Massaging Devices (AREA)
Abstract
Description
- Gegenstand der Erfindung ist ein Massagegerät zur Druck- und Streichmassage des menschlichen und tierischen Gewebes nach dem Oberbegriff des Patentanspruches 1.
- Ein solches Massagegerät ist mit der
DE 299 11 555 U1 bekannt. Es besteht aus zwei im Abstand vertikal übereinander angeordneten, drehend angetriebenen Wellen, an denen drehfest eine Anzahl von Massage- und Knetrollen angeordnet sind. Die Massage- und Knetrollen sind jedoch nur zur Ausübung einer Klopfmassage geeignet und können keine sich überlagernden Druck- und Streichbewegungen auf das zu behandelnde Gewebe ausführen. - Die Erfindung bezieht sich sowohl auf Massagegeräte, die als Standgerät ausgebildet sind, als auch auf handgehaltene Massagegeräte.
- Derartige Massagegeräte sind bekannt und bestehen im Wesentlichen aus einem Massagekörper, der drehbar angetrieben ist oder oszillierende Drehbewegungen um eine festgelegte Drehachse ausführt.
- Die Oberfläche des Massagekörpers wird auf eine bestimmte, zu behandelnde Körperstelle aufgelegt und durch Andruck des Massagekörpers werden die hin-und hergehenden Bewegungen von der Oberfläche des Massagekörpers auf die zu behandelnde Körperstelle eingetragen.
- Es hat sich jedoch herausgestellt, dass rein oszillierende Drehbewegungen nachteilig für die Behandlung des menschlichen oder tierischen Gewebes sind, weil es nicht zu einer gewünschten Ausstreichbewegung von Gewebeteilen kommt. Ein solches Massagegerät ist mit der
DE 299 18 677 U1 gezeigt. - Insbesondere bei der sogenannten Lymphdrainage ist es wichtig, dass zunächst ein in die Tiefe des Gewebeteils gerichteter Druck - also etwa normal zur Hautoberfläche) auf das zu behandelnde Lymphgefäß gerichtet wird und dann unter Beibehaltung dieses Druckes eine Austreichbewegung durchgeführt wird, die etwa parallel zur Hautoberfläche gerichtet ist. Diese besondere Druck- und Streichbewegung gelingt jedoch nicht mit einem drehend oszillierenden Massagekörper nach der
DE 299 18 677 U1 oder derEP 0 978 269 B1 . Bei den bekannten Massagegeräten ist deshalb die Behandlungswirkung schlecht. Außerdem werden solche Drehschwingungen als hart und unangenehm empfunden. - Wird die Frequenz einer solchen oszillierenden Drehbewegung geändert, führt dies in unerwünschter Weise dazu, dass auch die Schwingungsamplitude größer wird, was mit einem härteren Krafteintrag in das zu behandelnde Gewebe verbunden ist. Dies kommt daher, dass der drehend oszillierend angetriebene, bekannte Massagekörper in der Regel gummi- oder auf andere Weise federgelagert ist und bei Erhöhung der Drehfrequenz eine entsprechend weitere Auslenkung der Gummilager erfolgt, wodurch es zu dem unerwünschten größeren Krafteintrag in das zu behandelnde Gewebe bei Steigerung der Frequenz eines solchen bekannten Massagekörpers kommt.
- Der Erfindung liegt deshalb die Aufgabe zugrunde, nicht nur eine Druckmassage auf einem zu behandelnden Körperteil zu bewirken, sondern neben der Druckauch noch eine Streichmassage zu ermöglichen, die der Massagewirkung einer Lymphdrainage nahe kommt.
- Zur Lösung der gestellten Aufgabe ist die Erfindung dadurch gekennzeichnet, dass der Massagekörper eine elliptische Druck- und Zugbewegung auf das zu behandelnde Körperteil ausführt.
- Mit der gegebenen technischen Lehre ergibt sich zum ersten Mal der Vorteil, dass mit einem derartigen Massagekörper eine kombinierte Druck- und Streichmassage auf ein zu behandelndes Gewebe durchgeführt werden kann.
- Durch kreisförmige oder elliptische Verschiebetechniken im Sinn der vorliegenden Erfindung, welche mit leichtem Druck angewandt werden, soll Flüssigkeit aus dem Gewebe in das Lymphgefäßsystem verschoben werden. Die hier angewandte Lymphdrainage wirkt sich überwiegend auf den Haut- und Unterhautbereich aus und soll keine Mehrdurchblutung, wie in der klassischen Massage, bewirken. Weitere Indikationen sind sämtliche orthopädischen und traumatologischen Erkrankungen, die mit einer Schwellung einhergehen (Verrenkungen, Zerrungen, Verstauchungen, Muskelfaserrisse etc.) Auch bei Verbrennungen, Schleudertrauma, Morbus Sudeck und ähnlichen Krankheitsbildern wird die erfindungsgemäße Lymphdrainage angewendet.
- Es wird nach der Erfindung eine definierte Druck- und Streichbewegung des angetriebenen Massagekörpers in die Tiefe (normal zur Hautoberfläche) und Länge (parallel zur Hautoberfläche) des Gewebes eingetragen, wobei die Frequenz der Streichbewegung in weiten Grenzen veränderbar ist.
- In einer bevorzugten Ausführungsform liegt die Frequenz der Streichbewegung im Bereich zwischen 5 Hertz bis 40 Hertz.
- Die biomechanische Stimulation im Sinne der Erfindung ist eine seit Jahren bewährte Methode in Therapie, Rehabilitation, Regeneration und Prävention. In der Physiotherapie allgemein, zur postoperativen Behandlung, bei neuromuskulären Problemen (MS, Parkinson, Spasmus) und in der Schmerztherapie sind kurzfristig Erfolge zu erzielen.
- Bei der BISA handelt es sich um eine Methode ohne Reizstrom und chemische Substanzen. Sie beruht auf der Übertragung mechanischer Vibration definierter Schwingungsweite und Frequenzen auf das neuromuskuläre System. Die Muskellängenveränderung formt den Muskel und ändert die Weite der Blutgefäße, wodurch sich die Blutpumpfunktion der Muskulatur erhöht. Dabei werden auch die Mechanorezeptoren beeinflusst und somit auch das zentrale Nervensystem.
- Das Massagegerät nach der Erfindung ist für Therapie, Prävention, Sport- und Spitzensport geeignet und überträgt mechanische Schwingungen gezielt auf Problemzonen. Muskel- und Sehnenverkürzungen, aber auch Schmerzen werden schnell gemindert und Verklebungen gelöst. Die Anwendung ist auch bei frischen Verletzungen, wie z. B. Prellungen, Zerrungen, Muskelfaserrissen, Aduktorenproblemen usw. zu empfehlen.
- Sie eignet sich ideal als Vorbereitung und zum Aufwärmen bei allen sportlichen Aktivitäten und zum Stretching. Die Erfindung hilft dabei, die Trainingseffizienz um ein Vielfaches zu steigern. Sehr positiv wirkt sich das Training auch auf die Beweglichkeit aus. Bei Verletzungen ist durch den frühzeitigen Einsatz der BISA mit einer wesentlichen Verkürzung der Rehabilitationszeit zu rechnen.
- Für ausgebildete BISA-Therapeuten und Anwender bietet das Massagegerät ein sehr breites Spektrum an Behandlungsmöglichkeiten.
- Vorteile:
- Anregung der Blutzirkulation der Muskelkapillaren
- bessere Nährstoff- und Sauerstoffversorgung
- Entschlackung von Muskeln, Sehnen und Fasern
- beschleunigte Knochenregeneration
- Rückbildung von älterem Narbengewebe
- Verbesserung von Gelenksbeweglichkeit, Muskelkraft und Koordination
- Verkürzung der Rehabilitationszeit
- Reizung und Training der Rezeptoren in den tieferen Muskelschichten
- ZNS-Training der motorischen Koordination
- Straffung und Festigung von Hautproblemzonen (z.B. Cellulite)
- Kräftigung der Muskulatur
- Der verstärkte Blutaustausch im Körper führt zu einer verbesserten Versorgung mit Sauerstoff und Nährstoffen, zu einer Beschleunigung des Stoffwechsels und zum Muskelaufbau. Gleichzeitig werden die Gefäße gereinigt, indem sich Ablagerungen und altes Gewebe auflösen.
- Die vorliegende Erfindung bezieht sich sowohl auf die Ausbildung des Massagegerätes als Standgerät, aber auch auf die Ausbildung eines Massagegerätes als handgehaltenes Gerät, wobei es nur darauf ankommt, dass der Massagekörper sowohl beim Standgerät als auch beim handgehaltenen Gerät die besagte elliptische Druck- und Zugmassage auf das zu behandelnde Gewebe ausführt.
- In einer bevorzugten Ausgestaltung des Massagegerätes als Standgerät hat dieses folgende technische Daten:
- Anschluss 220 - 240 V, 50 - 60 Hz, 500 Watt
- elektronisch gesteuerte Gleichstrommotore
- Trommeldurchmesser 280 mm, Oberfläche gepolstert
- elektronisch gesteuert mit individueller Eingabe von Dauer und Frequenz
- Arm stufenlos verstellbar mit Einklemmsicherung
- maximale Höhe Oberkante Trommel 1 640 mm, tiefster Punkt 330 mm
- Frequenzbereich 5 - 27 Hz in 1 er Schritten
- Behandlungszeit in Minutenschritten
- Schwingungshöhe und Tiefe elliptisch (mit Nazarov-Oval) 4 zu 1 mm
- Massagetrommel in der Achse verdrehbar, 4 zu 1 mm, 1 zu 4 mm oder rund 3 mm
- alle Operationen sind mittels Fernbedienung ansteuerbar
- Sicherheitsleiste mit Abschaltung gegen Scheren
- Gewicht 90 kg, Standfläche 80 x 70 cm
- Hingegen hat ein handgehaltenes Gerät lediglich einen, elliptische Druck- und Streichbewegungen ausführenden, Massagekörper zum Gegenstand, der etwa 25 bis 40 mm Breite und Länge aufweist und der bevorzugt zylindrisch ausgebildet ist.
- Hierbei ist - im Gegensatz zu einem Standgerät - der Antriebsmotor für den Massagekörper nicht im Massagekörper selbst angeordnet, sondern außerhalb im Handgriff.
- Wegen der einfacheren Beschreibung wird in der folgenden Beschreibung ein als Standgerät ausgebildetes Massagegerät beschrieben, obwohl alle Eigenschaften dieses Stand-Massagegerätes auch auf das handgehaltene Massagegerät zutreffen. Es kommt also entscheidend auf die Ausbildung des elliptische Druck-und Streichbewegungen ausführenden Massagekörpers an. Diese Eigenschaften sind sowohl bei dem Standgerät als auch bei dem Handgerät gegeben.
- Mit einem solchen handgehaltenen oder als Standgerät ausgebildeten Massagegerät sind folgende Möglichkeiten gegeben:
- Muskel- und Körpertherapie
- Schmerzbehandlung
- Dehnungen
- Beweglichkeit
- Verletzungsprophylaxe
- Kraft und Kraftausdauer
- Figurforming
- Entschlackung
- Rehabilitation
- Löst Verspannungen blitzschnell
- Nachdem in der folgenden Beschreibung die Ausbildung des Massagegerätes als Standgerät beschrieben wird, wird nochmals darauf hingewiesen, dass die Erfindung nicht darauf beschränkt ist, sondern dass es entscheidend auf die Ausbildung des Massagekörpers ankommt, der die besagten elliptischen Druck-und Streichbewegungen ausführt.
- Hierbei wird in einem bevorzugten Ausführungsbeispiel davon ausgegangen, dass der Massagekörper als zylindrischer, gepolsterter Körper ausgebildet ist, dessen Oberfläche an das zu behandelnde Gewebe anlegbar ist, um so über die Oberfläche die Druck- und Streichbewegung auf das zu behandelnde Gewebe einzutragen.
- Die Erfindung ist jedoch nicht auf die Ausbildung eines zylindrischen Massagekörpers beschränkt.
- Der Massagekörper kann auch oval ausgebildet sein, er kann mehreckig ausgebildet sein, er kann birnenförmig ausgebildet sein, er kann kugelförmig ausgebildet sein und dergleichen mehr.
- Es kommt bei allen Ausführungsformen darauf an, dass er die beanspruchte Druck- und Streichbewegung an seiner Oberfläche ausführt.
- Ebenso wird beansprucht, dass die Oberfläche des Massagekörpers entweder hart oder gepolstert ausgebildet ist.
- In einer Weiterbildung dieser beiden Möglichkeiten wird ebenfalls beansprucht, dass in der Oberfläche des Massagekörpers wirksame Cremes, Lotionen, Flüssigkeiten und andere therapiewirksame Substanzen eingebracht werden können, die in einem Depot gelagert sind und nach und nach während der Massagebewegung in das Gewebe eingetragen werden.
- Beispielsweise kann die ansonsten nicht-permeable Oberfläche des Massagekörpers perforiert (permeabel) sein und an der Innenseite ein Depot aufweisen, in welches eine Lotion, eine Salbe oder eine Flüssigkeit eingefüllt wird, die bei der Ausführung der Druck- und Streichmassage auf das zu behandelnde Gewebe eingetragen wird.
- Der einfacheren Beschreibung wegen wird nicht mehr der allgemeine Begriff eines "Massagekörpers" verwendet, der elliptische Streich- und Zugbewegungen ausführt, sondern es wird der speziellere Begriff einer "Massagetrommel" verwendet, obwohl die Erfindung hierauf nicht beschränkt ist. Mit dem Begriff "Massagetrommel" wird im Folgenden ein rundzylindrischer Massagekörper bezeichnet. Dies jedoch nur zur Vereinfachung der Beschreibung.
- In einer bevorzugten Ausgestaltung des erfindungsgemäßen Massagegerätes als Standgerät besteht dieses im Wesentlichen aus einem aufrecht stehenden Fußgehäuse, welches in der Art eines Ständers bodenseitig mit einer Standplatte verbunden ist und an dessen oberen freien Ende eine Schwenkachse für die Drehaufnahme eines dort schwenkbar gehaltenen Schwenkarmes angeordnet ist. Am freien vorderen Ende des Schwenkarmes ist die Massagetrommel angeordnet, welche die beanspruchten elliptischen (Druck- und Streich-)Bewegungen ausführt. Hierbei wird es bevorzugt, wenn die Massagetrommel drehbar am vorderen Ende des Schwenkarmes angeordnet ist, um zu gewährleisten, dass mit der Drehung der Massagetrommel beliebige Oberflächenpunkte auf der Oberfläche der Massagetrommel in Eingriff mit dem zu behandelnden Gewebe gebracht werden können.
- In einer bevorzugten Ausgestaltung ist Schwingungsantrieb für die elliptische Bewegungskurve der Massagetrommel im Innenraum der Massagetrommel angeordnet.
- Wird jedoch die Massagetrommel als handgehaltenes Gerät ausgebildet, und es ist dann nicht notwendig, die Massagetrommel auch selbst drehbar auszubilden. Dies wird dann durch die Drehung der Hand ersetzt, die das Gehäuse eine eine für die Behandlung optimale Drehstellung verdreht.
- Kennzeichnend für die vorliegende Erfindung ist dem gemäß, dass die Oberfläche der Massagetrommel an unterschiedlichen Oberflächenbereichen auch unterschiedliche elliptische Bewegungen mit unterschiedlichen Längs- und Querkomponenten ausführt.
- Aus diesem Grund ist die Massagetrommel drehbar am vorderen freien Ende des Schwenkarmes des Standgerätes angeordnet, um jeden Punkt auf der Oberfläche der Massagetrommel in entsprechendem Eingriff mit dem zu behandelnden Gewebe bringen zu können, wobei je nach der Drehlage der Massagetrommel dieser Punkt mehr eine Druckmassage ausübt, mit einer verringerten Komponente der Streichmassage, oder umgekehrt, eine vergrößerte Komponente der Streichmassage mit einer verringerten Komponente der Druckmassage.
- Es überlagern sich also stets an unterschiedlichen Oberflächenpunkten der Massagetrommel unterschiedliche Kraftvektoren bezüglich der Druck- und der Streichmassage und aus diesem Grund ist die Massagetrommel drehbar, um beliebige Punkte an der Oberfläche der Massagetrommel in Eingriff mit dem auf diesem gewählten Punkt der Massagetrommel aufliegenden, zu behandelnden Gewebe zu bringen.
- Aus diesem Grund ist auch die Massagetrommel am freien schwenkbaren Ende des vorher erwähnten Schwenkarmes angeordnet, so dass beim Hochschwenken des Schwenkarmes, z. B. in eine vertikale Lage, es möglich ist, die Massagetrommel im Nackenbereich einer zu behandelnden, stehenden Person zu bringen.
- Ebenso kann der Schwenkarm herausgeschwenkt werden, um beispielsweise in eine horizontale Stellung gebracht zu werden, um so die Massagetrommel relativ bodennah anzuordnen, um in dieser Lage z. B. die Beine, Hüften und Unterschenkel einer zu behandelnden Person aufzulegen und der besagten Zug-und Streichmassage auszusetzen.
- Ebenso kann es vorgesehen sein, dass der Schwenkarm in bestimmten Bereichen automatisch schwenkbar ausgebildet ist, um ein Wandern der, die elliptischen Streichbewegungen ausführenden, Massagetrommel über größere Körperteile zu ermöglichen.
- Wichtig bei der vorliegenden Erfindung ist, dass der elliptische Bewegungsantrieb der Massagetrommel über mindestens zwei im Winkel zueinander angeordnete Pleuel geschieht, die exzentrisch mit ihren fußseitigen Enden auf einem drehbar angeordneten Antrieb gelagert sind.
- Damit wird demzufolge eine exzentrische, über Pleuel gesteuerte elliptische Verschiebebewegung auf den Außenumfang der Massagetrommel ausgeübt, wobei in einer bevorzugten Weiterbildung der vorliegenden Erfindung die Pleuelbewegung über radial vorgespannte Federn unterstützt wird, um eine Selbsthemmung der im Winkel zueinander angeordneten Pleuelstangen zu vermeiden.
- Demnach handelt es sich um in radialer Richtung wirkende, in axialer Richtung exzentrisch angetriebene Pleuel, die zwangsgesteuert - ohne Zwischenschaltung von Federgliedern - eine definierte elliptische Verschiebebewegung des Mantels der Massagetrommel ausführen. Weil die in axialer Richtung der Pleuel verschiebbaren Enden unmittelbar an der Mantelfläche der Massagetrommel angreifen, handelt es sich um einen direkten Verschiebeantrieb der Massagetrommel in deren radialer Richtung, ohne dass elastische Federglieder in diese Antriebskette eingeschaltet sind. Damit wird vermieden, dass bei Erhöhung der elliptischen Schwingungsfrequenz sich deren Amplitude vergrößert.
- Die Erfindung ist jedoch nicht auf einen Exzenterantrieb von radial angeordneten Pleueln beschränkt, wobei mindestens zwei im Winkel zueinander angeordnete Pleuelstangen vorhanden sind.
- In einer anderen Ausgestaltung der Erfindung kann es vorgesehen sein, dass im Innenraum der Massagetrommel ein exzentrischer Drehantrieb angeordnet ist, der z.B. als Drehmotor ausgebildet ist. Bei einem solchen Drehmotor wälzt sich der angetriebene, gewendelte Rotor auf dem mit einer ebenfalls schneckenförmig gewendelten Innenseite des Gehäuses, dem Stator, ab, und vollführt dabei mit seiner Figurenachse eine exzentrische Drehbewegung um die Statorachse. Die elastisch ausgebildete Massagetrommel bildet demnach die Statorachse und wird an ihrer Mantelfläche durch den innen umlaufenden Rotor radial aufgeweitet.
- Damit die im Winkel voneinander angeordneten, radial nach außen gerichteten Pleuel nicht in eine Selbsthemmung geraten, ist vorgesehen, den Trommelmantel mit Schraubenzugfedern zu stabilisieren.
- Statt der Stabilisierung des Trommelmantels durch Schraubenzugfedern können auch andere Stabilisierungselemente verwendet werden, z. B. eine innere Gelfüllung der Massagetrommel, welche den Trommelmantel gegenüber dem Drehzentrum abstützt.
- Wie bereits eingangs ausgeführt, ist eine weitere Ausführungsform der vorliegenden Erfindung nicht auf einen exzentrischen Pleuelantrieb beschränkt, sondern es können sämtliche anderen Exzenterantriebe verwendet werden, wie sie bei Exzenterdrehmotoren (siehe oben) bekannt sind.
- Entscheidend hierbei ist, dass die Pleuel in zwei im Winkel zueinander angeordneten Richtungen arbeiten, wobei die Richtungen bevorzugt 90 Grad betragen. Während sich das eine Pleuel um einen ersten Verschiebungsweg verschiebt, verschiebt sich auch das andere Pleuel um einen anderen Verschiebungsweg, so dass jeder Punkt auf dem Außenumfang der Trommel, der genau auf der Pleuelachse liegt, eine exzentrische Bewegungskurve ausführt.
- In den Mittenbereichen des Trommelmantels, die zwischen den beiden Pleuelachsen liegen, werden hingegen auf dem Außenumfang des Trommelmantels Kreisbewegungen ausgeführt.
- Auf diese Weise ist es durch Drehung der Massagetrommel um ihre Mittenlängsachse in Umfangsrichtung möglich, jeden beliebigen Punkt auf dem Trommelumfang in Eingriff mit dem zu behandelnden Körpergewebe zu bringen und wahlweise eine elliptische Bewegung mit hoher Druck- und schwacher Streichbewegung oder eine Kreisbewegung mit gleichmäßigem Druck und Streichbewegung oder wiederum eine elliptische Bewegung mit weniger Druck und höherer Streichbewegung an die Körperoberfläche zu bringen.
- Bei handgehaltenen Geräten entfällt hingegen eine Dreheinstellung der Massagetrommel, weil eine solche Dreheinstellung durch Drehung des Handgriffes an welchem die Massagetrommel angesetzt ist mit der Hand erfolgen kann.
- Bei einem solchen handgehaltenen Gerät besteht der Vorteil, dass ein sehr gedrängter und wenig Raum beanspruchender Aufbau gegeben ist. Ein Handgriff ist unmittelbar mit dem im Achsstummel verbunden, der seinerseits mit dem Rohr der Einrichtung verbunden ist. Die Lager müssen nicht doppelt gelagert ausgeführt sein. Es reicht aus, einfache Kugellager oder sogar Gleitlager zu verwenden. Deshalb ist es möglich, den gesamten Massagekörper mit einem gesamten Außendurchmesser von 20 bis 30 mm auszubilden.
- In einer ersten Ausgestaltung eines solchen handgehaltenen Gerätes ist es noch vorgesehen, dass die Federn als Zugfedern ausgebildet sind.
- In einer zweiten Ausgestaltung der Erfindung ist es hingegen vorgesehen, dass die Zugfedern entfallen und anstatt dessen der Innenraum des Gerätes außerhalb des Rohres mit einer elastomeren Masse aufgefüllt ist, die z. B. als Gelfüllung oder als elastomerer Schaum ausgebildet sein kann. Ein solcher elastomerer Schaum kann beispielsweise auch ein Polyurethanschaum sein.
- Der Erfindungsgegenstand der vorliegenden Erfindung ergibt sich nicht nur aus dem Gegenstand der einzelnen Patentansprüche, sondern auch aus der Kombination der einzelnen Patentansprüche untereinander.
- Alle in den Unterlagen, einschließlich der Zusammenfassung offenbarten Angaben und Merkmale, insbesondere die in den Zeichnungen dargestellte räumliche Ausbildung, werden als erfindungswesentlich beansprucht, soweit sie einzeln oder in Kombination gegenüber dem Stand der Technik neu sind.
- Im Folgenden wird die Erfindung anhand von lediglich einen Ausführungsweg darstellenden Zeichnungen näher erläutert. Hierbei gehen aus den Zeichnungen und ihrer Beschreibung weitere erfindungswesentliche Merkmale und Vorteile der Erfindung hervor.
- Es zeigen:
- Figur 1:
- perspektivisch eine Ansicht eines Masagegerätes als Standgerät
- Figur 2:
- die Bewegungskurve der Massagetrommel bei der Behandlung zweier unterschiedlicher Körperteile
- Figur 3:
- die Seitenansicht des Massagegerätes
- Figur 4:
- die Stirnansicht des Massagegerätes mit verschiedenen Schwenkstellungen des Schwenkarmes
- Figur 5:
- eine Seitenansicht auf den Schwenkarm
- Figur 6:
- eine Draufsicht auf den Schwenkarm
- Figur 7:
- die Seitenansicht auf das Fußgehäuse bei abgenommenem Schwenkarm
- Figur 8:
- die Stirnansicht der Anordnung nach
Figur 7 - Figur 9:
- eine vergrößerte Darstellung der Schwenkaufnahme des Schwenkarmes im Fußgehäuse mit Darstellung des Doppelschneckengetriebes
- Figur 10:
- eine Stirnansicht nach
Figur 9 in Pfeilrichtung X - Figur 11:
- perspektivische Ansicht des Doppelschneckengetriebes
- Figur 12:
- die Stirnansicht des Doppelschneckengetriebes nach
Figur 11 - Figur 13:
- die Seitenansicht des Doppelschneckengetriebes
- Figur 14:
- Schnitt durch die Massagetrommel
- Figur 15:
- perspektivische Ansicht eines Teilschnittes durch die Massagetrommel
- Figur 16:
- die Darstellung von zwei Pleuel für den Schwingungsantrieb der Massagetrommel
- Figur 17:
- der Mittenquerschnitt durch die Massagetrommel nach
Figur 14 - Figur 18:
- die vergrößerte Schnittansicht der Pleuellagerung von zwei im Winkel zueinander angeordneten Pleuel
- Figur 19:
- perspektivische Darstellung eines handgehaltenen Massagegerätes
- Figur 20:
- die Darstellung weiterer Einzelheiten des handgehaltenen Massagegerätes
- In
Figur 1 ist allgemein ein Massagegerät 1 als Standgerät dargestellt, welches aus einem Fußgehäuse 2 besteht, welches an seinem oberen freien Ende eine Schwenkachse 6 für die Drehaufnahme eines in den Pfeilrichtungen 7 dort verschwenkbar gehaltenen Schwenkarmes 4 aufweist. - Das Fußgehäuse 2 ist gegen den Boden mit einer Standplatte 3 abgestützt, auf die sich die zu behandelnde Person aufstellt, setzt oder kniet.
- Ebenso kann die zu behandelnde Person vor dem Massagegerät 1 stehen, wobei lediglich entscheidend ist, dass die am freien, vorderen Ende des Schwenkarmes 4 angeordnete Massagetrommel 5 in Eingriff mit dem zu behandelnden Gewebe oder Körperteil der zu behandelnden Person gelangt.
- Es wird bei der Darstellung nach
Figur 1 angenommen, dass der Oberflächenpunkt 17 auf der Trommeloberfläche 19 in Eingriff mit einem zu behandelnden Körperteil einer vor der Massagetrommel 5 stehenden Person gebracht werden soll. - Um dies zu erreichen, ist die Massagetrommel 5 drehbar in den Pfeilrichtungen 9 um die Schwenkachse 8 am vorderen freien Ende des Schwenkarmes 4 gelagert, wobei die Anschlagschraube 10 nur dazu dient, einmalig - für diese Behandlungssituation - die Drehlage der Massagetrommel 5 zur Festlegung des Behandlungsgebietes an der zu behandelnden Person einzustellen, wobei dann beispielsweise die Trommeloberfläche 19 mit dem Oberflächenpunkt 17 in Gegenüberstellung zur behandelnden Person gebracht wird. Ist diese Drehlage erreicht, wird die Anschlagschraube 10 wieder festgestellt und die Massagetrommel 5 bleibt in dieser Stellung während der gesamten Therapie.
- Wichtig ist, dass nun der Oberflächenpunkt 17 bzw. die sich parallel zur Längsachse der Trommeloberfläche 19 erstreckende Fläche, die durch den Oberflächenpunkt 17 abgedeckt wird, elliptische Kreisbewegungen entsprechend der Bewegungskurve 11 ausführt, wobei z. B. eine solche elliptische Bewegungskurve 11 in der Pfeilrichtung 12 (siehe
Figur 2 ) durchlaufen wird. - In
Figur 2 ist schematisiert dargestellt, wie zwei unterschiedliche Körperteile 13, 13' mit unterschiedlichen Zug- und Streichbewegungen behandelt werden können. - Befindet sich beispielsweise nach
Figur 2 der zu behandelnde Körperteil 13 auf der rechten Seite derFigur 2 , wirkt an diesem Oberflächenpunkt 17B ein relativ geringer Kraftvektor 16 im Sinne einer Druckmassage und ein relativ starker Kraftvektor 15 im Sinne einer Streichmassage. - Bei Andruck des zu behandelnden Körperteils 13 in
Figur 2 (rechts) wird somit der zu behandelnde Körperteil geringfügig bei der Auflage im Sinne einer Verdrängungszone 66a nach innen verdrängt, so dass ein entsprechender Gegendruck auf der Oberfläche der Trommel am Oberflächenpunkt 17B entsteht und die Hautfläche 67b liegt dann auf der Oberfläche der Trommel an. - Es entsteht dann die in den Kraftvektoren 15, 16 eingezeichnete Druck- und Zugbewegung auf die Hautoberfläche 67b, wie in
Figur 2 dargestellt ist. Es kommt also zu einer Art einer Lymphdrainage, wobei in die Tiefe gehende Druckbewegungen mit überlagerten Streichbewegungen auf das Gewebe einwirken. - Wird hingegen die Massagetrommel 5 so gedreht, dass beispielsweise der Körperteil 13' in Eingriff mit der Oberfläche der Massagetrommel kommt - dies ist in
Figur 2 oben dargestellt - kommt es wieder zu einer Verdrängungszone 66a der Haut, bis diese auf der Oberfläche der Massagetrommel 5 im Bereich des Oberflächenpunktes 17a aufliegt, und in diesem Fall kommt es zu einer größeren Druckeinwirkung aufgrund des größeren Kraftvektors 16' und zu einer geringeren Streichwirkung aufgrund des geringeren Kraftvektors 15'. - Demzufolge kann entsprechend der Drehlage der Massagetrommel 5 wahlweise an jeder beliebigen Oberfläche der Massagetrommel eine entsprechende Druck-und Streichbewegung mit unterschiedlichen Kraftvektoren 15, 16 ausgebildet werden, wobei die durch die Kraftvektoren entstehenden Druck- und Streichbewegungen entsprechend der Drehlage der Massagetrommel 5 einstellbar sind.
- Die Größe des Kraftvektors 15, 15' ist auch davon abhängig, mit welcher Kraft die Hautoberfläche 14 an den Außenumfang der Massagetrommel 5 (Trommeloberfläche 19) angelegt wird.
- Der besseren Übersichtigkeit halber ist in
Figur 1 die elliptische Bewegungskurve 11 in Verlängerung 18 der Trommeloberfläche 19 dargestellt. - Aus
Figuren 4 und5 ergibt sich, dass an der einen Seite des Schwenkarmes 4 Sicherheitsleisten 20 angeordnet sind, die für eine Notabschaltung des Schwenkarmes 4 bestimmt sind. - Die
Figur 3 zeigt, dass jeder beliebige Oberflächenpunkt 17 auf der Trommeloberfläche 19 die beanspruchte elliptische Bewegungskurve 11 ausführt, die im gezeigten Ausführungsbeispiel in Pfeilrichtung 12 durchlaufen wird. Die Massagetrommel 5 ist hierbei am freien vorderen Ende über einen Achsstummel 35 drehbar am Schwenkarm 4 aufgenommen. - Die
Figur 4 zeigt die verschiedenen, möglichen Schwenklagen des Schwenkarmes 4, der so in die Schwenkstellung 4' oder 4" oder in jede beliebige Zwischenstellung geschwenkt werden kann. Demzufolge ist die Längsachse 21 des Schwenkarmes 4 dreheinstellbar. - Die
Figuren 5 und 6 zeigen die Seitenansicht und die Draufsicht auf den Schwenkarm 4, wo erkennbar ist, dass ein Zwischenring 22 am Schwenklager vorhanden ist. Im vorderen Bereich des Schwenkarmes 4 ist ein Trommellager 24 für die Drehaufnahme des Achsstummels 35 vorgesehen. Dieser ist im Bereich eines Drehlagers 25, welches als Kugellager ausgebildet ist, im Bereich von radial außen liegenden Lagerflächen 26 drehbar aufgenommen. - In
Figur 6 zeigt, dass die Anschlagschraube 10 die Drehung des Drehlagers 25 festsetzen kann. - Ebenso ist aus
Figur 6 zu entnehmen, dass Befestigungsschrauben 23 zur Schraubbefestigung des Schwenkarmes 4 am Drehlager 27 gemäßFiguren 7 und 8 bestimmt ist. - Das Drehlager 27 weist eine Innenverzahnung 28 auf, die gemäß
Figur 8 und denFiguren 11 bis 13 mit einem Doppelschneckengetriebe 30 drehend angetrieben ist. Das Doppelschneckengetriebe 30 besteht aus einem drehangetriebenen Antriebsritzel 32, welcher sich in Dreheingriff mit der Innenverzahnung 28 befindet. - Das Antriebsritzel 32 wird über einen Doppelschneckenantrieb stark untersetzt von einem Antriebsmotor 33 angetrieben. Auf diese Weise wird die Drehzahl des Antriebsmotors 33 auf eine sehr langsamen Drehzahl des Antriebsritzels 32 von z. B. 8 Umdrehungen pro Minute untersetzt.
- Die
Figur 7 zeigt, dass im Innenraum des Drehlagers 27 noch eine Anzahl von Sicherheitsschaltern 29 angeordnet sind, um im Bedarfsfall den Drehantrieb für den Schwenkarm 4 zu unterbrechen. - An der Vorderseite des Fußgehäuses 2 ist noch ein Deckel 31 angeordnet, hinter dem die Steuerung für das gesamte Massagegerät angeordnet ist.
- Die Montageplatte 34 ist mit dem Außenring des Drehlagers fest verbunden, wobei der Außenring gehäusefest angeordnet ist, während die Befestigungsschrauben 23 am Schwenkarm 4 fest mit dem drehbaren Innenring des Drehlagers 27 verbunden sind.
- In den
Figuren 9 und 10 ist nochmals das Drehlager 27 dargestellt, wo erkennbar ist, dass das Ritzel 32 mit dem drehbar in den Pfeilrichtungen 7 angetriebenen Innenring des Drehlagers 27 kämmt. An dem Innenring ist die Innenverzahnung 28 angeordnet. - In den
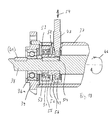
Figuren 14 bis 18 ist nun der erfindungsgemäße elliptische Antrieb bezüglich der Bewegungskurve 11 der Massagetrommel 5 angeordnet. Hierbei greift der Achsstummel 35 in den Innenraum der Massagetrommel 5 gemäß derFiguren 14 und15 hinein und ist dort über ein Kugellager 36b verbunden. - Auf der gegenüberliegenden Seite ist ein gleiches Kugellager 36a angeordnet, und gemäß
Figur 15 sind die außen liegenden Lagerflansche 39a, 39b über die Lagerflansche verbindende und gleichmäßig am Umfang verteilt angeordnete sowie in Längsrichtung sich erstreckende Befestigungsschrauben 14 verbunden. - Auf diese Weise ist die gesamte Massagetrommel 5 auf dem Achsstummel 35 drehbar und drehfeststellbar gelagert.
- In der Mitte der Massagetrommel ist eine Antriebsachse 38 angeordnet, die in den Kugellagern 36a, 36b drehbar aufgenommen ist.
- Sie weist an ihrem äußeren freien Ende gemäß
Figur 15 ein Abtriebsrad 41 auf, mit dem sie drehfest verbunden ist. Über das Abtriebsrad 41 läuft ein Antriebsriemen 42, der mit einem Antriebsrad 44 verbunden ist, der von einem Antriebsmotor 43 angetrieben ist. - Auf diese Weise wird die Antriebsachse 38 beispielsweise in Pfeilrichtung 46 drehend angetrieben. Die Drehzahl des Antriebsmotors 43 ist einstellbar ausgebildet.
- Auf dem Außenumfang der Antriebsachse 38 sind Exzenterhülsen 52, 53 über Passfedern mit der Antriebsachse 38 verbunden, und diese tragen die Pleuellager 49, 50, an denen die innenseitigen Enden von paarweise angeordneten Pleueln 47, 48 ansetzen. Der Antriebsmotor 43 wird im Übrigen in einem Aufnahmeflansch 45 gehalten.
- Die Antriebsachse 38 wird von einem außen liegenden zylindrischen Rohr 37 übergriffen, in dem zugeordnete Schlitze für das Hindurchgreifen der paarweise angeordneten Pleuel 47, 48 vorgesehen sind.
- Die weiteren Einzelheiten der Lagerung sind aus
Figur 18 zu erkennen. - Auf den jeweiligen Exzenterhülsen 52, 53 sind Pleuellager 49, 50 angeordnet, die die innenseitige Lagerung für die paarweise angeordneten und jeweils im Winkel zueinander versetzt angeordneten und radial nach außen gerichteten Pleuel 47, 48 bilden.
- Der jeweilige Pleuelring 55, 56 sitzt über die vorher besagten Drehlager auf der Antriebsachse 38 auf und trägt die Pleuel 47, 48, die stangenförmig ausgebildet sind.
- Auf diese Weise führt jedes Pleuel 47, 48 eine Exzenterbewegung 54 aus, wobei die Exzenterbewegung 54a kleiner ist als beispielsweise die Exzenterbewegung 54b. Hierdurch wird die elliptische Bewegung erzielt.
- Radial auswärts sind die Pleuel 47,48 in Pleuelgelenkaugen 57, 58 aufgenommen, wie dies im Schnitt in
Figur 14 dargestellt ist. Diese beiden paarweise angeordneten Augen 57, 58 sind jeweils im gehäuseseitig angeordneten Gummipuffern 59 gelagert, die gehäuseseitig mit Hilfe von Schrauben 60 an gehäusefesten Lagerplatten 61 angreifen. - Auf diese Weise ist sichergestellt, dass die Pleuel 47, 48 über die Gummipuffer 59 gegenüber dem Trommelmantel 63 elastisch federnd abgestützt sind.
- Am Außenumfang des Trommelmantels 63 ist beispielsweise eine Gummiauflage 62 angeordnet.
- Wird das hier gezeigte Massagegerät 1 als Handgerät ausgebildet, dann entfällt die Anordnung des Antriebsmotors 43 im Innenraum der Massagetrommel 5 und dieser wird stattdessen für den Drehantrieb der Antriebsachse 38 in einen handgehaltenen Handgriff verlegt.
- Die in
Figur 14 dargestellten Schraubenzugfedern 64 setzen mit ihren radial einwärts gerichteten Enden an radial einwärts angeordneten Befestigungsschrauben 40 an, die ihrerseits an den Lagerflanschen 39a, 39b befestigt sind. - Das radiale äußere Ende jeder Schraubenzugfeder 64 ist in einer Aufnahmeplatte 65 in einem dort angeordneten Gelenkpunkt aufgenommen.
- Die Schraubenzugfedern 64 üben somit eine Federkraft auf den Trommelmantel 63 aus, die radial einwärts gerichtet ist, um eine gegenseitige Verriegelung oder Selbsthemmung der im Winkel zueinander angeordneten Pleuel 47, 48 zu vermeiden.
- Damit ist der Trommelmantel 63 in radialer Richtung federvorgespannt, um ein loses Bewegungsspiel der Pleuelpaare 47, 48 in die Richtung der Längsachse zu unterbinden.
- Nachdem die beiden Pleuelpaare 47, 48 bevorzugt im Winkel von 90 Grad zueinander ausgerichtet sind, vermeiden die Schraubenzugfedern 64, die gleichmäßig verteilt am Umfang angeordnet sind, eine Selbsthemmung der Pleuelverschiebungen der unterschiedlich gerichteten Pleuelpaare 47, 48.
- Die
Figur 17 zeigt, dass an unterschiedlichen Oberflächenpunkten am Außenumfang der Massagetrommel 5 unterschiedliche Bewegungskurven erzeugt werden. - Während beim Oberflächenpunkt 17a eine elliptische Bewegungskurve 11 mit hohem Streichanteil (hoher Kraftvektor 15) und niedrigem Druckanteil (niedriger Kraftvektor 16) erzeugt wird, ist dies beim Oberflächenpunkt 17b gerade umgekehrt, weil dort ein in Druckrichtung gerichteter hoher Kraftvektor 15 und einen in Streichrichtung gehender geringerer Kraftvektor 16 vorgesehen ist.
- Im Winkelbereich zwischen den beiden Pleuelachsen der Pleuelpaare 47, 48 wird hingegen bezüglich des Oberflächenpunktes 17c eine Kreisbewegung erzielt.
- Demzufolge dienen unterschiedliche Punkte 17a, 17b, 17c auf der Oberfläche der Massagetrommel auch unterschiedlichen Bewegungskurven. Dies ist der Grund dafür, dass die Massagetrommel 5 dreheinstellbar und feststellbar am freien Ende des Schwenkarmes 4 angeordnet ist, um so die entsprechenden Punkte 17a, 17b oder 17c in Eingriff mit der dort aufzulegenden Körperoberfläche zu bringen.
- Aus
Figur 18 sind weitere Einzelheiten der exzentrischen Lagerung der Pleuel auf der Antriebsachse 38 dargestellt. Die entsprechenden Teile wurden bereits schon anhand der vorstehenden Zeichnungen erläutert. - Damit kann jeder beliebige Punkt auf der Oberfläche der Massagetrommel in eine einstellbare elliptische Bewegungskurve gebracht werden.
- Damit kann jeder beliebige Massagekörper, der nur im Ausführungsbeispiel als Massagetrommel ausgebildet ist, in eine sich überlagernde Längs- und Querbewegung umgesetzt werden, um so die gewünschte Druck- und Streichmassage auf das damit behandelte Gewebe auszuführen.
- Die
Figuren 19 und20 zeigen die Ausbildung eines Massagegerätes als Handgerät, wobei für die gleichen Teile die gleichen Bezugszeichen gelten. - In
Figur 19 ist dargestellt, wie ein Handgerät in einer ersten Ausführungsform ausgebildet sein kann. Wichtig ist, dass der Handgriff 68 direkt und drehfest mit dem Achsstummel 35 verbunden ist, wobei der Drehantrieb der Antriebsachse 38 in den Pfeilrichtungen 46 durch einen nicht näher dargestellten Antriebsmotor erfolgt, der im Handgriff angeordnet ist. Der Antriebsmotor kann entweder batteriebetrieben oder von einem Niederspannungsnetzteil mit Strom versorgt sein. - Bei der ersten Ausführungsform eines Handgerätes nach
Figur 19 ist erkennbar, dass noch Schraubenzugfedern 64 vorhanden sind, wie sie auch bei dem stationären Gerät verwendet wurden. - Bei der zweiten Ausführungsform nach
Figur 20 können jedoch solche Schraubenzugfedern 64 entfallen, und stattdessen wird das Rückstellvermögen des Trommelmantels 63 durch eine Gel- oder Elastomerfüllung 69 ersetzt, so dass das so ausgestaltete Handgerät 70 noch kleiner gebaut werden kann, weil die Schraubenzugfedern 64 gemäß dem Handgerät 70 nachFigur 19 entfallen können. - Ansonsten gelten in den
Figuren 19 und20 die gleichen Bezugszeichen, wie sie vorstehend in Bezug auf das stationäre Gerät verwendet wurden. -
- 1
- Massagegerät
- 2
- Fußgehäuse
- 3
- Standplatte
- 4
- Schwenkarm
- 5
- Massagetrommel
- 6
- Schwenkachse (von 4)
- 7
- Pfeilrichtung
- 8
- Schwenkachse (von 5)
- 9
- Pfeilrichtung
- 10
- Anschlagschraube
- 11
- Bewegungskurve (elliptisch)
- 12
- Pfeilrichtung
- 13
- Körperteil 13'
- 14
- Hautoberfläche
- 15
- Kraftvektor 15'
- 16
- Kraftvektor 16'
- 17
- Oberflächenpunkt 17b
- 18
- Verlängerung
- 19
- Trommeloberfläche
- 20
- Sicherheitsleiste
- 21
- Längsachse
- 22
- Zwischenring
- 23
- Befestigungsschraube
- 24
- Trommellager
- 25
- Drehlager
- 26
- Lagerfläche
- 27
- Drehlager
- 28
- Innenverzahnung
- 29
- Sicherheitsschalter
- 30
- Doppelschneckengetriebe
- 31
- Deckel (für Steuerung)
- 32
- Antriebsritzel
- 33
- Antriebsmotor
- 34
- Montageplatte
- 35
- Achsstummel
- 36
- Kugellager
- 37
- Rohr
- 38
- Antriebsachse
- 39
- Lagerflansch a, b
- 40
- Befestigungsschraube
- 41
- Abtriebsrad
- 42
- Antriebsriemen
- 43
- Antriebsmotor
- 44
- Antriebsrad
- 45
- Aufnahmeflansch
- 46
- Pfeilrichtung
- 47
- Pleuel (Paar)
- 48
- Pleuel (Paar)
- 49
- Pleuellager
- 50
- Pleuellager
- 51
- Passfeder
- 52
- Exzenterhülse
- 53
- Exzenterhülse
- 54
- Exzenterbewegung a, b
- 55
- Pleuelring
- 56
- Pleuelring
- 57
- Pleuelgelenkauge
- 58
- Pleuelgelenkauge
- 59
- Gummipuffer
- 60
- Schraube
- 61
- Lagerplatte
- 62
- Gummiauflage
- 63
- Trommelmantel (von 5)
- 64
- Schraubenzugfeder
- 65
- Aufnahmeplatte
- 66
- Verdrängungszone (von 13)
- 67
- Hautfläche (von 13)
Claims (10)
- Verfahren zur Massage des menschlichen oder tierischen Gewebes durch Einbringung mindestens einer Druckkomponente mit einem auf der Hautfläche (67) im Bereich einer Verdrängungszone (66) aufliegenden Massagekörpers (5), dadurch gekennzeichnet, dass der Massagekörper (5) eine elliptische Druck- und Zugbewegung auf das zu behandelnde Gewebe ausführt.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass eine definierte Druck- und Streichbewegung des angetriebenen Massagekörpers (5) in die Tiefe (normal zur Hautoberfläche) und Länge (parallel zur Hautoberfläche) des Gewebes eingetragen wird, wobei die Frequenz der Streichbewegung veränderbar ist.
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Oberfläche des Massagekörpers (5) an unterschiedlichen Oberflächenbereichen (17, 18, 19) auch unterschiedliche elliptische Bewegungen (11) mit unterschiedlichen Längs- und Querkomponenten (15, 16) ausführt.
- Massagerät zur Massage des menschlichen oder tierischen Gewebes durch Einbringung mindestens einer Druckkomponente mit einem auf der Hautfläche (67) im Bereich einer Verdrängungszone (66) aufliegenden Massagekörpers (5), dadurch gekennzeichnet, dass der Massagekörper (5) dadurch eine elliptische Druck- und Zugbewegung auf das zu behandelnde Gewebe ausführt, dass er als Hohlkörper mit einem auf das Gewebe aufzusetzenden Trommelmantel (63) ausgebildet ist, in dessen Innenraum eine drehangetriebene Antriebsachse (38) angeordnet ist, auf der Exzenterhülsen (52, 53) angeordnet sind, an denen die einen Enden von Pleueln (47, 48) angeordnet sind, die sich radial von der Antriebsachse (38) in Richtung zum Trommelmantel (63) des Massagekörpers (5) erstrecken und sich dort abstützen.
- Massagegerät nach Anspruch 4, dadurch gekennzeichnet, dass die Pleuel (47, 48) in gegenseitigem Winkel versetzt am Umfang des Trommelmantels (63) angeordnet sind.
- Massagegerät nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass die Pleuel (47, 48) jeweils paarweise angeordnet sind.
- Massagegerät nach einem der Anspruch 4 bis 6, dadurch gekennzeichnet, dass es Standgerät ausgebildet ist und der als Massagetrommel (5) ausgebildete Massagekörper am freien Ende eines schwenkbar an einem bodenseitigen Fußgehäuse gelagerten Schwenkarmes (4) gelagert ist.
- Massagegerät nach Anspruch 8, dadurch gekennzeichnet, dass die Massagetrommel (5) dreh- und feststellbar am Schwenkarm (4) gelagert ist.
- Massagegerät nach einem der Ansprüche 4 bis 8, dadurch gekennzeichnet, dass es als Handgerät (70) ausgebildet ist und der Antriebsmotor(43) für den Drehantrieb der Antriebswelle (38) in den Handgriff des Gehäuses verlegt ist.
- Massagegerät nach einem der Ansprüche 4 bis 9, dadurch gekennzeichnet, dass es zur Ausführung des Verfahrens nach einem oder mehreren der Ansprüche 1 bis 4 geeignet ist.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011015120A DE102011015120A1 (de) | 2011-03-26 | 2011-03-26 | Massagegerät zur Druck- und Streichmassage |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2505177A1 true EP2505177A1 (de) | 2012-10-03 |
Family
ID=45976037
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12002102A Withdrawn EP2505177A1 (de) | 2011-03-26 | 2012-03-26 | Massagegerät zur Druck-und Streichmassage |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2505177A1 (de) |
| DE (1) | DE102011015120A1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4144398A1 (de) | 2022-04-04 | 2023-03-08 | Kathrin Henning | Handgerät und verfahren zur hautstraffung |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109498385B (zh) * | 2018-11-08 | 2024-07-02 | 江苏医药职业学院 | 一种腰部术后按摩恢复装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4443756C1 (de) * | 1994-12-08 | 1996-02-08 | Siegfried Hoffmann | Massagegerät |
| DE29911555U1 (de) | 1998-08-14 | 1999-10-21 | EUROKEYTON, S.A., Alicante | Massagegerät |
| DE29918677U1 (de) | 1999-10-23 | 2000-02-03 | Schulz, Roland, 91587 Adelshofen | Massagegerät |
| DE19944456A1 (de) * | 1999-09-16 | 2001-03-29 | Arthro Science Ag | Beingerät zur biomechanischen Muskelstimulation |
| EP0978269B1 (de) | 1998-08-06 | 2003-10-01 | Jean Frajdenrajch | Massagegerät für Anwendung auf der Haut |
| WO2006030007A1 (de) * | 2004-09-17 | 2006-03-23 | Stp Swiss Therapeutic Products Ag | Gerät zur selektiven stimulation bestimmter körperpartien |
| WO2011031352A1 (en) * | 2009-09-13 | 2011-03-17 | Stp Swiss Therapeutic Products Ag | Enhanced biomechanical stimulation device |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53105084A (en) * | 1977-02-24 | 1978-09-12 | Matsushita Electric Works Ltd | Massage instrument |
| WO2002069880A1 (en) * | 2001-03-02 | 2002-09-12 | Ceragem Co., Ltd | Thermotherapeutic apparatus and its control method |
| CN1518970A (zh) * | 2003-02-06 | 2004-08-11 | ������������ʽ���� | 按摩机及按摩方法 |
-
2011
- 2011-03-26 DE DE102011015120A patent/DE102011015120A1/de not_active Ceased
-
2012
- 2012-03-26 EP EP12002102A patent/EP2505177A1/de not_active Withdrawn
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4443756C1 (de) * | 1994-12-08 | 1996-02-08 | Siegfried Hoffmann | Massagegerät |
| EP0978269B1 (de) | 1998-08-06 | 2003-10-01 | Jean Frajdenrajch | Massagegerät für Anwendung auf der Haut |
| DE29911555U1 (de) | 1998-08-14 | 1999-10-21 | EUROKEYTON, S.A., Alicante | Massagegerät |
| DE19944456A1 (de) * | 1999-09-16 | 2001-03-29 | Arthro Science Ag | Beingerät zur biomechanischen Muskelstimulation |
| DE29918677U1 (de) | 1999-10-23 | 2000-02-03 | Schulz, Roland, 91587 Adelshofen | Massagegerät |
| WO2006030007A1 (de) * | 2004-09-17 | 2006-03-23 | Stp Swiss Therapeutic Products Ag | Gerät zur selektiven stimulation bestimmter körperpartien |
| WO2011031352A1 (en) * | 2009-09-13 | 2011-03-17 | Stp Swiss Therapeutic Products Ag | Enhanced biomechanical stimulation device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4144398A1 (de) | 2022-04-04 | 2023-03-08 | Kathrin Henning | Handgerät und verfahren zur hautstraffung |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102011015120A1 (de) | 2012-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2549972B1 (de) | Gerät zur massage beziehungsweise behandlung der rücken- und nackenmuskulatur | |
| DE102014221116B4 (de) | Gewebe-Behandlungsstab mit mindestens einer Behandlungskante | |
| DE2212454C3 (de) | Massagevorrichtung für den menschlichen Körper | |
| EP3124003B1 (de) | Therapievorrichtung zur behandlung von faszialen verklebungen bei einer person | |
| EP1009354B1 (de) | Massagegerät | |
| EP2775984B1 (de) | Auflagevorrichtung und stimulationsgerät, sowie verfahren zum neurophysiologischen stimulieren und verwendung eines stimulationsgerätes | |
| CH676546A5 (en) | Scalp massage appts. with fingers in sprung hood - has inner hood driven with swaying motion w.r.t. outer hood | |
| EP2327386A1 (de) | Vorrichtung und Verfahren zur trockenen Massage mittels Wasserstrahlen | |
| EP1541112B1 (de) | Muskelstimulations- und Massagegerät | |
| EP3019250A1 (de) | Bewegungs- und therapievorrichtung und therapieverfahren zur kurativen behandlung und prävention schmerzhafter zustände am bewegungsapparat einer person | |
| EP2505177A1 (de) | Massagegerät zur Druck-und Streichmassage | |
| DE4443756C1 (de) | Massagegerät | |
| EP1732494B1 (de) | Massagearm | |
| CH663537A5 (en) | Massaging device | |
| EP0929348B1 (de) | Gerät zur stimulation von muskeln des bewegungsapparats | |
| EP1479363B1 (de) | Einbringen von Kosmetika in die Haut | |
| DE4408867A1 (de) | Gerät zur Tiefentherapie | |
| WO1989009040A1 (fr) | Roue a mouvement tridimensionnel | |
| EP2181737B1 (de) | Trainings- oder Sportgerät | |
| WO2008061867A1 (de) | Gerät zur biomechanischen stimulation | |
| DE4300836C1 (de) | Vorrichtung zur gezielten Vibrationsbehandlung | |
| DE202025105989U1 (de) | Massagegerät-Struktur | |
| DE2122269C3 (de) | Gymnastikgerät zur Behandlung der Wirbelsäule | |
| DE9200725U1 (de) | Therapie-/Trainingsgerät | |
| CH702857A2 (de) | Gerät zur Massage beziehungsweise Behandlung der Rücken- und Nackenmuskulatur. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20130328 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: LIKOSAR, FERDINAND Owner name: LIKOSAR, JULIANE |
|
| 17Q | First examination report despatched |
Effective date: 20160517 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20181002 |