EP2982618A1 - Schwingförderer zur zweidimensionalen bewegung von objekten sowie verfahren zum betrieb des schwingförderers - Google Patents
Schwingförderer zur zweidimensionalen bewegung von objekten sowie verfahren zum betrieb des schwingförderers Download PDFInfo
- Publication number
- EP2982618A1 EP2982618A1 EP15175698.8A EP15175698A EP2982618A1 EP 2982618 A1 EP2982618 A1 EP 2982618A1 EP 15175698 A EP15175698 A EP 15175698A EP 2982618 A1 EP2982618 A1 EP 2982618A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- excitation
- vibratory conveyor
- elements
- conveyor according
- objects
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000005284 excitation Effects 0.000 claims abstract description 297
- 230000010355 oscillation Effects 0.000 claims description 31
- 238000013016 damping Methods 0.000 claims description 29
- 230000008878 coupling Effects 0.000 claims description 17
- 238000010168 coupling process Methods 0.000 claims description 17
- 238000005859 coupling reaction Methods 0.000 claims description 17
- 238000000034 method Methods 0.000 claims description 10
- 239000000463 material Substances 0.000 claims description 9
- 230000007423 decrease Effects 0.000 claims description 2
- 239000012780 transparent material Substances 0.000 claims description 2
- 238000002604 ultrasonography Methods 0.000 claims description 2
- 230000008859 change Effects 0.000 description 6
- 238000005452 bending Methods 0.000 description 4
- 230000015572 biosynthetic process Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 230000004913 activation Effects 0.000 description 3
- 238000001994 activation Methods 0.000 description 3
- 239000000919 ceramic Substances 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- 210000001015 abdomen Anatomy 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000806 elastomer Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000035508 accumulation Effects 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G27/00—Jigging conveyors
- B65G27/10—Applications of devices for generating or transmitting jigging movements
- B65G27/32—Applications of devices for generating or transmitting jigging movements with means for controlling direction, frequency or amplitude of vibration or shaking movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B3/00—Methods or apparatus specially adapted for transmitting mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/06—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with piezoelectric effect or with electrostriction
- B06B1/0607—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with piezoelectric effect or with electrostriction using multiple elements
- B06B1/0611—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with piezoelectric effect or with electrostriction using multiple elements in a pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G27/00—Jigging conveyors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D19/00—Control of mechanical oscillations, e.g. of amplitude, of frequency, of phase
- G05D19/02—Control of mechanical oscillations, e.g. of amplitude, of frequency, of phase characterised by the use of electric means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G27/00—Jigging conveyors
- B65G27/10—Applications of devices for generating or transmitting jigging movements
- B65G27/16—Applications of devices for generating or transmitting jigging movements of vibrators, i.e. devices for producing movements of high frequency and small amplitude
- B65G27/24—Electromagnetic devices
Definitions
- the invention relates to a vibratory conveyor for the two-dimensional movement of objects, comprising a vibrating plate, on the conveying surface of which at least one object is movable by vibrations of the vibrating plate, and at least two excitation elements for exciting vibrations of the vibrating plate.
- Vibratory conveyors are used to promote a variety of especially smaller objects. Objects are promoted by vibrations. Typically, rigid conveyor rails or rigid plates are used, which perform an elliptical motion and thus transport the objects through micro-feet.
- An alignment and separation of objects can be carried out in a vibratory conveyor, for example, characterized in that during a longitudinal conveying in a vibratory conveyor, the conveying surface of the vibrating conveyor is profiled in the conveying direction, so that individual objects are guided and aligned in individual profiles.
- a vibrating plate movable by separate actuators in all three spatial directions.
- the document fails DE 102 61 659 A1 to provide a plurality of actuators on the surface of a stimulable to oscillate in a plurality of spatial directions plate which exert a normal force on the objects during a given activation time in each case.
- an implementation of a corresponding arrangement for moving objects is technically very complicated and it is always only a separate movement of such objects possible, on which a force can be exerted by the intended actuators, z. B. of magnetic objects.
- the invention is therefore based on the object to provide a vibratory conveyor, which is technically relatively easy to implement and yet allows control over the direction of movement of objects and / or a separation of on the conveyor surface close to each other objects.
- the object is achieved by a vibratory conveyor of the aforementioned type, wherein the excitation elements at spaced apart excitation positions with the vibrating plate coupled ultrasonic transducers, by which the vibrating plate at the respective excitation position in response to each separately be provided by a control device to the respective excitation element respective control signal is excitable to the vibration.
- the vibrating plate is not excited to a global vibration in which the entire vibrating plate vibrates as a rigid element, but bending vibrations, in particular surface vibrations of the conveying surface of the vibrating plate are preferably excited. Due to this excitation traveling waves and / or standing waves are formed on the conveying surface, causing the movement of the objects.
- the vibratory conveyor according to the invention is on the one hand suitable for positioning an object on the vibrating plate by moving in different directions, and on the other hand to singulate objects, ie to move objects lying close to each other in different directions.
- the control device may comprise a plurality of control circuits which are each assigned to one or more excitation elements. It is possible for the control circuits to control individual excitation elements or groups of excitation elements completely independently of one another. Advantageously, however, the control circuits are synchronized in order to provide respective control signals with the same oscillation frequency and in particular a predetermined phase position of the various control signals.
- the vibratory conveyor it is possible to supply only one of the excitation elements a control signal and to lay the other excitation elements, for example, to a ground potential.
- a traveling wave is generated on the vibrating plate, which starts from the excitation position of the driven excitation element and loses amplitude with increasing distance from this excitation position.
- Such a traveling wave causes objects on the vibrating plate in the direction of the respective excitation position are moved, wherein the movement speed increases with increasing proximity to the excitation position.
- a plurality of excitation elements are used, which in particular do not lie on a straight line.
- an object can already be moved in a plurality of directions. Due to the position-dependent movement speed, a singling of objects is possible even if only one excitation element is exclusively controlled.
- the excitation elements it is possible for the excitation elements to be controllable by the control device in such a way that the conveying surface can be displaced into an overall oscillation by a superimposition of the excited oscillations.
- several of the excitation elements control signals are supplied, which lead to a vibration of the excitation element.
- the use of a total vibration formed by superposition of excited oscillations for the movement of objects is explained below using the example of the control of two excitation elements. Of course, more than two excitation elements can be simultaneously driven to generate vibrations to produce a total vibration.
- a plurality of objects are arranged on a connecting line between the excitation positions of the two controlled excitation elements. If the amplitudes of the excited oscillations are equal, in particular the control signals have the same amplitude and are the If excitation elements are of the same design, then the objects are each moved in the direction of the excitation position to which they are closer at the beginning of the excitation. For example, if the objects at the beginning are evenly distributed in the area between the excitation positions, they are divided into two groups. By adjusting the relative amplitudes of the control signals, the point between the excitation positions, at which the direction of movement of the objects changes, can be adjusted.
- an object is to be considered which is located at an object position on the conveying surface, which is at a distance from a connecting line between the excitation positions of the driven excitation elements.
- the oscillation amplitudes of the two excitation elements and the respective distance of the object from the excitation positions are the same.
- the object moves to the connecting line with a moving direction perpendicular to the direction of the connecting line. The object thus moves towards both excitation elements. If the object is initially closer to one of the two excitation positions and / or one of the amplitudes of the control signal is greater than the amplitude of the other control signal, the object approaches one of the excitation positions faster than the other. In this case, a curved movement of the object takes place.
- a movement angle between the direction of movement and the connecting line can be specified for an object at a certain object position, which is not on the connecting line between the two controlled excitation elements.
- a corresponding choice of the amplitudes allows a free definition of this angle between a linear movement to the first of the excitation regions to and a linear movement to the second of the excitation regions.
- the selectable angle range can additionally be extended if one of the excitation elements is operated as a damping element by adjusting a phase position between the excitations.
- the vibratory conveyor according to the invention comprises at least three of the excitation elements, wherein the excitation position of the third excitation element is spaced from a connecting straight line between the excitation positions of the first and the second excitation element.
- the vibratory conveyor can thus have at least three excitation elements which are not located on a common straight line. Travel waves generated by excitation elements act attractive in the vibratory conveyor according to the invention.
- a polygon is spanned whose corners are formed by the excitation positions. Within the polygon, an object can be moved by specifying appropriate control signal to any position. In this case, any number of excitation elements can be provided.
- further excitation positions can be provided on connecting lines between the corners.
- the oscillation plate can be polygonal, in particular rectangular, with several sides, wherein at least one of the excitation elements is arranged on the edge side in the region of each of the sides.
- the excitation positions may be arranged within the plate surface of the vibrating plate and in particular adjacent to the edge of the vibrating plate. In particular, if a plurality of excitation elements are provided on each side, a movement direction and a target point of a movement for an object on the oscillating plate can be determined substantially freely by adapting the control signals for the excitation elements.
- the oscillating plate is substantially round or elliptical, wherein the excitation elements are circumferentially arranged circumferentially.
- excitation elements may alternatively be arranged only on parts of the sides or on a portion of the circumference.
- the ultrasonic transducers can each comprise one, in particular prestressed, multi-layer piezoelectric actuator.
- Multi-layer piezo actuators are special suitable to cause a high lift and / or large forces even at relatively low voltages.
- a bias of the piezoelectric actuator so for example by arranging the positions of the Pizeoaktors in a housing, such that the piezoelectric actuator is already compressed without an applied voltage, the already available at low voltages forces can be further increased.
- the housing may be formed, for example, ceramic or metal.
- the piezoelectric actuator can be arranged in each case between the oscillating plate and a counterweight.
- the counterweight can be connected exclusively via the piezoelectric actuator or the housing of a prestressed piezoelectric actuator with the vibrating plate and otherwise vibrate freely.
- counterweight and in particular a coupling element that connects the piezoelectric actuator with the vibrating plate even at low amplitudes of the control signal large vibration amplitudes can be achieved.
- the piezoelectric actuator or a coupling element fixedly connected to the piezoactuator can each be adhesively bonded to the oscillating plate and / or screwed and / or positively connected. Alternatively, a frictional connection between the piezoelectric actuator or the coupling element and the vibrating plate would be possible.
- the oscillating plate could, for example, be clamped by a clamping device arranged on the coupling element. A stable coupling of the piezoelectric actuator to the vibrating plate is essential in order to achieve an optimal coupling of the vibration in the vibrating plate.
- the vibrating conveyor according to the invention may comprise at least one damping element and / or the vibrating plate itself may be formed of a vibration damping material, so that the oscillation amplitude of the vibrating plate in an excitation by at least one of the excitation elements with increasing distance from the excitation element associated excitation positions in at least one direction along the Delivery surface drops.
- a vibration-damping Material can be used in particular a material with high internal friction, such as a plastic or an elastomer.
- the damping element may be arranged on a side surface and / or on the edge side on the conveying surface and / or on the edge side on the surface of the vibration plate facing away from the conveying surface.
- a flat region of the side surface, the conveying surface or the opposite surface may be coated with a vibration-damping material or a layer of vibration-damping material may be applied to the corresponding surface and glued to it, for example.
- a damping element as a damping element, which is in frictional contact with the edge of the oscillating plate. In this case, the vibrating plate is deprived of energy by the friction and the vibration is thus also damped.
- the damping element may in particular be a flat layer of a vibration-damping material, for example a rubber or an elastomer.
- At least one selected one of the excitation elements may be controllable by the control device in such a way that it has a vibration amplitude of at least one of the other Excitation elements generated vibration of the vibrating plate at the selected excitation element associated excitation position reduced.
- control device can be designed to control the selected excitation element with a control signal which is phase-locked with a predetermined phase position to the control signal of the further excitation element.
- the propagation speed of bending or surface waves of the vibrating plate is substantially constant.
- an excitation with a certain frequency, amplitude and phase at the excitation position of the further excitation element clearly results in a vibration amplitude, phase and frequency at the excitation position of the selected excitation element.
- the phase position of the oscillations at the different excitation positions depends exclusively on the oscillation frequency and the propagation velocity of the wave on the oscillating plate.
- phase offset between the control signal for the further excitation element and the control signal for the selected excitation element can thus be achieved that the selected excitation element is excited to a vibration which is 180 ° out of phase with respect to a wave incoming from the further excitation element and this thus completely or partially canceled.
- an excitation of the vibrating plate takes place by a plurality of further excitation elements with the same frequency.
- a sinusoidal oscillation having the same frequency is formed by adding the sinusoidal signals phase-shifted due to the propagation times to the excitation position of the selected excitation element.
- the phase angle of this oscillation can be determined from the distances of the further excitation positions to the selected excitation position as well as the frequency and the propagation velocity of the oscillation on the oscillating plate.
- the control device is designed to detect a vibration at the excitation position of the selected excitation element and to determine the control signal for the selected excitation element as a function of the detected oscillation.
- the oscillation at the excitation position of the selected excitation element can be detected by the selected excitation element itself.
- the selected excitation element it is possible for the selected excitation element not to be actuated initially and for voltages dropping at the excitation element to be measured by the control device.
- the excitation element is an ultrasonic transducer comprising a piezoelectric actuator, the voltage dropped across the excitation element are substantially proportional to a deflection of the oscillating plate at the excitation position.
- a vibration amplitude, vibration frequency, and vibration phase at the excitation position of the selected excitation element can be measured, and the control signal can be determined so as to compensate for this vibration.
- the control signal can be determined so as to compensate for this vibration.
- a control loop can be provided which controls a voltage dropping at the excitation element to essentially 0 and thus also substantially sets the oscillation amplitude at the excitation position of the selected excitation element to 0.
- the control device provides a control signal with the resonant frequency of the respective excitation element.
- relatively large vibration amplitudes can be achieved even with a small displacement, for example, a piezoelectric actuator and thus with relatively low control voltages.
- Platteneigenformen can be used in the vibratory conveyor according to the invention to move objects on the vibrating plate or the movement of certain objects suppress. Therefore, it is advantageous if such control signals for the excitation element can be provided by the control device such that a standing wave is generated on the oscillating plate.
- a corresponding standing wave or plate shape in particular has at least one node or at least one nodal line on the swivel plate on which there is substantially no vibration of the vibrating plate. In this case, a movement of objects from antinodes to nodes of vibration occurs. This can be used in particular for the separation of objects or for the collection of objects in certain areas of the vibrating plate.
- control signals for the excitation elements which lead to the formation of standing waves, can be determined by theoretical precalculation.
- the frequencies of control signals of one or more of the excitation elements can be driven through stepwise or continuously and by measuring voltages and in particular currents at the excitation elements or further, for example optical sensors, frequencies can be identified that lead to the formation of plate eigenmodes.
- the objects which are moved by the vibratory conveyor according to the invention may be objects in which certain orientations are desired, for example electrical components. It is therefore advantageous if the vibratory conveyor additionally comprises an actuator in the control of which the entire vibrating plate is moved perpendicular to the conveying surface by the control device. A sudden movement of the entire oscillating plate perpendicular to the conveying surface can lead to a "flipping" of objects, ie to a change of the surface with which the object rests on the conveyor surface.
- the additional actuator may in particular be an electromechanical actuator.
- an electromagnet may be provided below or above the vibrating plate, and the vibrating plate itself or an element connected to the vibrating plate may be magnetic.
- the additional actuator in particular macroscopic movements over several millimeters, for example, triggered.
- the excitation is pulsed, yet an excitation frequency is typically well below the ultrasonic range.
- an excitation cycle of the additional actuator may take at least 100 ⁇ s, in particular at least one millisecond, for example 10 milliseconds.
- the ultrasonic transducers typically have a relatively small stroke, but very high accelerations can be achieved at the reversal points of the movement.
- the vibrating plate is formed of a transparent material.
- the oscillating plate may in particular be formed of transparent glass, plastic or a transparent ceramic.
- cubic ZrO 2 or sintered corundum (Al 2 O 3 ) can be used as the transparent ceramic.
- the invention also relates to a method for operating a vibrating conveyor according to the invention, wherein a separate control signal to the excitation elements is provided by the control device, whereby the vibrating plate is put into an overall vibration, through the the object located on the conveyor surface is moved.
- control signals which are not constant, are provided to a plurality of excitation elements, so that a plurality of excited oscillations are superimposed on the oscillating plate.
- the excitation elements are driven by control signals of the same frequency.
- the control signals of at least two of the excitation elements can be predetermined such that the distance of the object from the excitation positions of the excitation elements driven in this way is reduced.
- two excitation elements can be controlled, from whose connecting line an object is spaced apart. The object can move towards the connecting line between the excitation regions of the two excitation elements and thus to both excitation positions.
- control signals being predetermined such that the objects are moved in such a way that a distance between the objects is reduced or increased.
- a distance between the objects for example, only a single one of the excitation elements can be supplied with a non-constant control signal. In this case, the at least two objects move to exactly one excitation position, which can reduce their distance.
- the amplitudes of the excitations can be selected, for example, such that at least one of the objects in the direction of a first of the excitation elements and at least a second of the objects in Direction of a second moves the excitation elements.
- a vibratory conveyor with at least three excitation elements can be used as the vibratory conveyor, whose excitation positions form a quadrilateral on the conveying surface, whereby the control signals respectively supplied to the excitation elements are predetermined in such a way that the object reaches a predetermined position within the Rectangle is moved.
- a triangle or a quadrangle can be spanned by the excitation elements.
- the control signals can in particular be temporally varied in the context of the movement of the object to the predetermined position.
- excitation elements such that in each case the excitation positions of a plurality of the excitation elements are arranged along the edges of a polygon.
- An arrangement of the excitation elements or their excitation positions along the edges of a quadrilateral allows, in particular, a substantially parallel movement of a plurality of objects on the oscillating plate, since a substantially planar traveling wave can be generated by the plurality of excitation elements along the edge of the quadrilateral.
- Fig. 1 to 7 show numerous embodiments of vibratory conveyor according to the invention. Exemplary embodiments of the inventive method are described below in the context of the explanations of the embodiments of the vibratory conveyor according to the invention. An explanation of an embodiment of a particular method in connection with a specific embodiment of the vibratory conveyor does not restrict the corresponding method to such a vibratory conveyor.
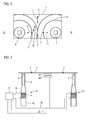
- Fig. 1 shows an embodiment of a vibrating conveyor for the two-dimensional movement of objects.
- the movement of the objects 2, 3, 4 and 5 on the vibrating plate 1 upon excitation of the vibrating plate 1 at the excitation positions 6 and 7 will be described with reference to a plan view of the vibrating plate 1.
- the technical implementation of the suggestion will be detailed later with reference to Fig. 2 explains that a section of the fly conveyor according to Fig. 1 along the line II shows.
- the oscillating plate 1 is excited sinusoidally at the excitation positions 6 and 7 at the same frequency. Since the oscillating plate 1 is formed of a vibration-damping material, such as transparent plastic, traveling waves are respectively caused by the excitations, which have a respectively decreasing from the excitation position 6 and 7 with increasing distance amplitude. The propagation of these traveling waves is in Fig. 1 indicated by the concentric circles 8.
- the distance of the object 2 from the excitation position 6 is substantially smaller than the distance of the object 2 to the excitation position 7. Therefore, the traveling wave traveling from the excitation position 6 to the object 2 has the position of the Object 2 a much larger amplitude than the incoming of the excitation position 7 traveling wave. The effect of the incoming from the excitation position 7 traveling wave can therefore be approximately neglected.
- the object 2 is moved in the direction 9 to the excitation position 6, since object movement always takes place on a vibration plate stimulated by a bending or surface wave counter to the propagation direction of a damped traveling wave. Accordingly, the object 3 moves in the direction 10, to the excitation position 7. With simultaneous excitation of oscillations at the excitation positions 6 and 7 with the same amplitude, accumulations of objects can thus be separated, since the objects are moved in different directions depending on their object position.
- a vibrating conveyor according to Fig. 1 So allows a simple and flexible separation of objects.
- Object 4 is located at exactly the same distance from the excitation positions 6 and 7, but is at a distance from a connecting line between the excitation positions 6 and 7.
- the resulting traveling waves are superimposed, so that the oscillating plate 1 is put into an overall oscillation.
- this total vibration corresponds to an incoming traveling wave which propagates in the direction of the upper edge of the oscillating plate 1. Accordingly, the object 4 moves in the direction 11 perpendicular to a connecting line between the excitation positions 6 and 7.
- the oscillation amplitudes of the vibrations coupled to the excitation positions 6 and 7, the direction of movement 11 of the object 4 can be varied.
- the resulting total oscillation at the object position of the object 5 corresponds to a traveling wave coming from a point of the Connecting straight line between the excitation positions 6 and 7 goes out.
- the object 5 is moved in the direction 12.
- the direction of movement 12 changes in the direction of the excitation position 6.
- the object 5 thus performs a curved movement at a constant excitation at the excitation positions 6 and 7.
- the direction of movement 12 can also be adjusted at any time by adjusting the relative excitation amplitudes at the excitation positions 6 and 7, as has already been explained for object 4.
- Fig. 2 shows a sectional view of the in Fig. 1 shown vibrating conveyor along the line II.
- the excitation of vibrations is first explained for the excitation position 6.
- the vibrating plate 1 is coupled to the excitation position 6 with an ultrasonic transducer 13.
- the ultrasonic transducer comprises a piezoactuator 14, which is arranged between the oscillating plate 1 and the counterweight 15.
- the coupling of the piezoelectric actuator with the oscillating plate 1 via a coupling element 16 which is bonded to both the piezoelectric actuator 14 and the vibrating plate 1.
- the connection of the coupling element 16 to the piezoelectric actuator 14 and / or the vibrating plate 1 could be done in alternative embodiments, for example, by screwing or a positive or non-positive coupling.
- the piezoelectric actuator 14 is a multi-layer, prestressed piezoactuator, which is arranged in a housing, not shown, which biases the piezoelectric crystals of the piezoelectric actuator.
- the control device 17 provides a ground signal via the terminal 18 and a control signal for the piezoactuator 14 via the terminal 19. Depending on the voltage of the control signal, the piezoelectric actuator 14 expands or is compressed. If an oscillating, in particular sinusoidal, signal is predetermined by the control device 17, the counterweight 15 oscillates against the oscillating plate 1 due to the expansion change of the piezoactuator 14 and thus generates oscillations of the oscillating plate 1 at the excitation position 6.
- control device 17 provides a separate control signal for the excitation element 21 via the connection 20, by means of which the oscillating plate 1 can be excited to oscillate at the excitation position 7.
- the controller 17 may independently adjust the amplitudes of the control signals provided to the excitation element 13 and the excitation element 21 to control the amplitude ratio of the oscillations coupled to the excitation positions 6 and 7. Accordingly, by the control device 17 as already for Fig. 1 explained, a direction of movement 9, 10, 11, 12 for the objects 2, 3, 4, 5 are given.
- the excitation element 21 is driven with a control signal whose phase position with respect to the control signal for the Excitation element 13 is fixed, in such a way that the excitation at the excitation position 7 is opposite to a vibration by the incoming from the excitation position 6 traveling wave.
- the phase angle of the control signal is determined from a known propagation speed of the traveling wave on the oscillating plate 1 and the distance between the excitation positions 6 and 7.
- phase position it would be possible to measure this phase position.
- the excitation element 13 is driven with a control signal and via the terminal 20, the voltage drop across the piezo element of the excitation element 21 is measured by the control device 17. From a phase position of the falling voltage with respect to the phase position of the control signal for the excitation element 13, the phase position for the attenuating control signal is determined.
- control device 17 it would be possible for the control device 17 to reach the excitation direction 21 in order to achieve a damping effect in the excitation region 7 in such a way that the voltage drop across the piezoelectric element is regulated to substantially zero by a control loop.
- an additional actuator 36 is provided, which is designed as an electromagnet.
- the actuator 36 When the actuator 36 is energized by the control device 17, a magnet 37 fastened to the oscillating plate 1 is first attracted by the actuator 36, wherein an elastic bearing, not shown, of the oscillating plate 1 is compressed becomes.
- This sudden tightening of the permanent magnet 37 leads to a sudden change in position of the vibrating plate 1, whereby the objects leave the conveying surface due to their inertia in the short term.
- a further excitation element is provided, which can set the oscillating plate 1 at the excitation position 22 in response to a separate control signal.
- an object located on the oscillating plate 1 can also be moved in the direction of the excitation position 22 or in the direction of the connecting lines between the excitation position 22 and the excitation position 6 or the excitation position 7 by providing corresponding control signals , An object located on the conveying surface of the vibrating plate 1 can thus be moved to any position in the triangle 23 indicated by a dashed line.
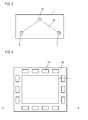
- Fig. 4 shows a further embodiment of a vibrating conveyor for the two-dimensional movement of objects on the conveying surface of the vibrating plate 1.
- the vibrating plate 1 is rectangular, wherein on the sides of the rectangle in each case a plurality of excitation regions 24 are provided with associated excitation elements.
- a damping element 25 On the conveying surface as well as on the side facing away from the conveying surface of the vibrating plate 1, a damping element 25, namely a layer of an elastic material with high internal friction, for example rubber, glued on the edge side.
- Fig. 5 shows a sectional view of the vibratory conveyor according to Fig. 4 along the line V.
- the structure and function of the excitation element 28 correspond to that Fig. 2 explained excitation element 13th
- the coupling element 16 passes through the oscillating plate 1 in a central region of the excitation region 24 and is screwed to the oscillating plate 1 laterally of this central region via a spacer plate 26 and screws 27.
- the excitation element 28 is stabilized against lateral movements in the direction of the conveying surface.
- the spacer plate 26 is a very good vibration coupling between the excitation element 28 and the vibrating plate.
- the use of the damper element 25 fulfills two functions. By a peripheral damping of the vibrating plate 1 on the one hand reflections are almost completely suppressed at the edge of the vibrating plate 1, whereby the formation of standing waves on the vibrating plate 1 is suppressed. While, as with reference to below Fig. 7 explained, standing wave or Platteneigenformen can be used advantageously in vibrating conveyors, the suppression of these standing waves allows a particularly simple control of the excitation elements 28 of the vibrating conveyor.
- the excitation element 28 in FIG Fig. 4 and 5 shown vibratory conveyor an object position-dependent determination of the direction of movement, so that objects can also be separated.
- the excitation elements 28 arranged on two opposite edges of the oscillating plate 1 can each be actuated to provide a substantially planar traveling wave. Depending on the position of an object on the conveying surface and the relative excitation amplitude, objects are thus moved in the direction of one or the other edge of the vibrating plate 1.
- Fig. 6 shows a further embodiment of a vibrating conveyor.
- the shape of the oscillating plate 1 is oval and the excitation elements 24 are circumferentially arranged circumferentially on the edge of the oscillating plate 1. Otherwise corresponds to in Fig. 6 shown vibrating conveyor in structure and function of the in Fig. 4 and 5 shown vibratory conveyor.
- Fig. 7 shows a fifth embodiment of a vibratory conveyor, are used in the movement of objects Platteneigenformen.
- control signals are provided with a frequency corresponding to a resonance frequency of a bending vibration of the vibrating plate 1 in the transverse direction in Fig. 7 equivalent.
- a substantially plane wave propagates from the excitation regions 29 in the transverse direction.
- the upper and lower edges of the vibration plate 1 in Fig. 7 can be additionally damped by not shown damping elements to suppress reflections.
- the plane wave is attenuated only slightly by the oscillating plate 1, it is reflected by the left and right edges of the oscillating plate 1 in the image.
- a standing wave is formed, which has in the areas indicated by the lines 31, 33 and 35 areas bellies and in the areas indicated by the lines 32 and 34 areas nodes of the wave, ie areas where by the excitation at the Excitation positions 29 no vibration of the vibrating plate 1 takes place.
- a movement in the transverse direction is at least partially suppressed by the stabilization of the objects in the region of the nodal lines 32, 34, so that, for example, an upward movement of the objects in the region of the line 32 and a downward movement of the objects in the region of the line 34 is possible, wherein a movement of Objects between the areas of the lines 32 and 34 is suppressed by the belly of the standing wave in the region of the line 33.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Jigging Conveyors (AREA)
Abstract
Description
- Die Erfindung betrifft einen Schwingförderer zur zweidimensionalen Bewegung von Objekten, umfassend eine Schwingplatte, auf deren Förderoberfläche wenigstens ein Objekt durch Schwingungen der Schwingplatte bewegbar ist, sowie wenigstens zwei Anregungselemente zur Anregung von Schwingungen der Schwingplatte.
- Schwingförderer werden genutzt um eine Vielzahl insbesondere kleinerer Objekte zu fördern. Objekte werden durch Vibrationen gefördert. Typischerweise werden steife Förderschienen oder starre Platten genutzt, die eine elliptische Bewegung durchführen und somit die Objekte durch Mikrowürfe transportieren.
- Beim Transport bzw. bei der Bewegung von Objekten, beispielsweise von elektrischen Bauteilen, ist es wünschenswert, die Objekte zweidimensional bewegen zu können, die Objekte auszurichten zu können und/oder Ansammlungen von Objekten trennen zu können. Eine Ausrichtung und Separierung von Objekten kann bei einem Schwingförderer beispielsweise dadurch erfolgen, dass bei einer Längsförderung in einem Schwingförderer die Förderoberfläche des Schwingförderers in Förderrichtung profiliert ist, so dass einzelne Objekte in einzelnen Profilen geführt und ausgerichtet werden. Als Alternative hierzu ist es bekannt, eine Schwingplatte durch separate Aktoren in allen drei Raumrichtungen bewegbar auszubilden. Somit können mehrere Objekte gemeinsam auf einer Schwingplatte in zwei Richtungen verschoben werden.
- Um eine separate Bewegung einzelner Objekte zu ermöglichen, schlägt die Druckschrift
DE 102 61 659 A1 vor, eine Vielzahl von Aktoren auf der Oberfläche einer zu Schwingungen in mehrere Raumrichtungen anregbaren Platte vorzusehen, die während einer vorgegebenen Aktivierungszeit jeweils eine Normalkraft auf die Objekte ausüben. Somit können Objekte zwar einzeln und gezielt bewegt werden, eine Umsetzung einer entsprechenden Anordnung zur Bewegung von Objekten ist jedoch technisch sehr aufwendig und es ist stets nur eine separate Bewegung solcher Objekte möglich, auf die durch die vorgesehenen Aktoren eine Kraft ausgeübt werden kann, z. B. von magnetischen Objekten. - Der Erfindung liegt somit die Aufgabe zugrunde, einen Schwingförderer anzugeben, der technisch relativ einfach zu realisieren ist und der dennoch eine Kontrolle über die Bewegungsrichtung von Objekten und/oder eine Trennung von auf der Förderoberfläche nahe beieinanderliegenden Objekten ermöglicht.
- Die Aufgabe wird erfindungsgemäß durch einen Schwingförderer der eingangs genannten Art gelöst, wobei die Anregungselemente an voneinander beabstandeten Anregungspositionen mit der Schwingplatte gekoppelte Ultraschallwandler sind, durch die die Schwingplatte an der jeweiligen Anregungsposition in Abhängigkeit eines jeweils separat durch eine Steuereinrichtung an das jeweilige Anregungselement bereitstellbaren jeweiligen Steuersignals zur Schwingung anregbar ist.
- Erfindungsgemäß wird vorgeschlagen, an voneinander beabstandeten Anregungspositionen mit der Schwingplatte gekoppelte Ultraschallwandler zu nutzen, um die Schwingplatte zu Schwingungen anzuregen. Aufgrund der hohen Anregungsfrequenz und der lokalen Einkopplung der Anregung wird die Schwingplatte insbesondere nicht zu einer globalen Schwingung angeregt, bei der die gesamte Schwingplatte als steifes Element schwingt, sondern es werden vorzugsweise Biegeschwingungen, insbesondere Oberflächenschwingungen der Förderoberfläche der Schwingplatte angeregt. Aufgrund dieser Anregung werden auf der Förderoberfläche Wanderwellen und/oder stehende Wellen ausgebildet, die die Bewegung der Objekte verursachen.
- Bei einem Abklingen der Amplitude einer Wanderwelle mit zunehmendem Abstand von der Quelle, also insbesondere einer der Anregungspositionen, erfolgt ein Transport von Objekten auf der Förderoberfläche entgegen der Ausbreitungsrichtung der Wanderwelle. Bei der Ausbildung einer stehenden Welle auf der Schwingplatte werden Objekte in Richtung der Knoten der stehenden Welle bewegt. Durch Vorgabe entsprechender Steuersignale durch die Steuereinrichtung können die Ultraschallwandler unabhängig angesteuert werden, wobei vorzugsweise eine gleiche Schwingungsfrequenz für alle Ultraschallwandler genutzt wird. Somit können verschiedene Gesamtschwingungen der Schwingplatte erreicht werden. Durch Variation der Steuersignale, insbesondere der Amplitudenverhältnisse und/oder der Phasen der Steuersignale, die den Anregungselementen zugeführt werden, können verschiedene Bewegungsrichtungen von Objekten auf der Förderoberfläche erreicht werden. Zugleich ist die Bewegungsrichtung eines Objekts für eine Vielzahl von Kombinationen von Steuersignalen abhängig von der Objektposition auf der Förderoberfläche. Bereits ein geringer Positionsunterschied kann zu einem starken Unterschied der Bewegungsrichtung führen. Somit ist der erfindungsgemäße Schwingförderer einerseits dazu geeignet, ein Objekt auf der Schwingplatte durch eine Bewegung in verschiedene Richtungen zu positionieren, und zum anderen dazu, Objekte zu vereinzeln, also nahe beieinanderliegende Objekte in verschiedene Richtungen zu bewegen.
- Die Steuereinrichtung kann mehrere Steuerschaltungen umfassen, die jeweils einem oder mehreren Anregungselementen zugeordnet sind. Es ist möglich, dass die Steuerschaltungen einzelne Anregungselemente oder Gruppen von Anregungselementen vollständig unabhängig voneinander steuern. Vorteilhaft sind die Steuerschaltungen jedoch synchronisiert, um jeweils Steuersignale mit gleicher Schwingungsfrequenz und insbesondere einer vorgegebene Phasenlage der verschiedenen Steuersignale bereitzustellen.
- Im erfindungsgemäßen Schwingförderer ist es möglich, jeweils nur einem der Anregungselemente ein Steuersignal zuzuführen und die weiteren Anregungselemente beispielsweise auf ein Massepotential zu legen. Insbesondere wenn eine dämpfende Schwingplatte oder weitere schwingungsdämpfende Elemente genutzt werden, wird auf der Schwingplatte eine Wanderwelle generiert, die von der Anregungsposition des angesteuerten Anregungselements ausgeht und mit zunehmendem Abstand von dieser Anregungsposition an Amplitude verliert. Eine derartige Wanderwelle führt dazu, dass Objekte auf der Schwingplatte in Richtung der jeweiligen Anregungsposition bewegt werden, wobei die Bewegungsgeschwindigkeit mit zunehmender Nähe zur Anregungsposition zunimmt. In einem erfindungsgemäßen Schwingförderer werden mehrere Anregungselemente genutzt, die insbesondere nicht auf einer Gerade liegen. Je nach Auswahl des anzusteuernden Anregungselements kann ein Objekt bereits in eine Mehrzahl von Richtungen bewegt werden. Aufgrund der positionsabhängigen Bewegungsgeschwindigkeit ist auch bei ausschließlicher Ansteuerung nur eines Anregungselements bereits eine Vereinzelung von Objekten möglich.
- Es ist jedoch wünschenswert, Bewegungen von Objekten auf Kurven auf der Schwingplatte ohne eine Änderung der Ansteuerung der Anregungselemente zu ermöglichen und/oder verschiedene Bewegungsrichtungen auch bei Nutzung von wenigen, insbesondere von nur zwei, Anregungselementen zu ermöglichen.
- Daher ist es möglich, dass die Anregungselemente durch die Steuereinrichtung derart ansteuerbar sind, dass durch eine Überlagerung der angeregten Schwingungen die Förderoberfläche in eine Gesamtschwingung versetzbar ist. Es werden also mehreren der Anregungselemente Steuersignale zugeführt, die zu einer Schwingung des Anregungselements führen. Die Nutzung einer durch Überlagerung von angeregten Schwingungen gebildeten Gesamtschwingung zur Bewegung von Objekten wird im Folgenden am Beispiel der Ansteuerung von zwei Anregungselementen erläutert. Selbstverständlich können auch mehr als zwei Anregungselemente zugleich zur Erzeugung von Schwingungen angesteuert werden, um eine Gesamtschwingung zu erzeugen. Zudem wird im Folgenden davon ausgegangen, dass die beiden Anregungselemente mit dergleichen Frequenz angeregt werden. Eine Anregung mit unterschiedlichen Frequenzen an unterschiedlichen Positionen ist möglich, die Auswirkungen sind jedoch weniger intuitiv erfassbar.
- In einem einfachen Beispiel sind mehrere Objekte auf einer Verbindungsgeraden zwischen den Anregungspositionen der zwei angesteuerten Anregungselemente angeordnet. Sind die Amplituden der angeregten Schwingungen gleich, weisen also insbesondere die Steuersignale die gleiche Amplitude auf und sind die Anregungselemente gleich ausgebildet, so werden die Objekte jeweils in Richtung der Anregungsposition bewegt, der sie zu Beginn der Anregung näher sind. Sind die Objekte zu Beginn also beispielsweise gleichmäßig im Bereich zwischen den Anregungspositionen verteilt, so werden sie in zwei Gruppen geteilt. Durch eine Anpassung der relativen Amplituden der Steuersignale kann der Punkt zwischen den Anregungspositionen, an dem sich die Bewegungsrichtung der Objekte ändert, angepasst werden.
- In einem zweiten Beispiel soll ein Objekt betrachtet werden, das sich an einer Objektposition auf der Förderoberfläche befindet, die von einer Verbindungsgeraden zwischen den Anregungspositionen der angesteuerten Anregungselemente beabstandet ist. Zunächst soll angenommen werden, dass die Schwingungsamplituden der beiden Anregungselemente und der jeweilige Abstand des Objekts von den Anregungspositionen gleich sind. In diesem Fall bewegt sich das Objekt mit einer Bewegungsrichtung, die senkrecht auf der Richtung der Verbindungsgeraden steht, auf die Verbindungsgerade zu. Das Objekt bewegt sich somit auf beide Anregungselemente zu. Befindet sich das Objekt anfänglich näher an einer der beiden Anregungspositionen und/oder wird eine der Amplituden des Steuersignals größer als die Amplitude des anderen Steuersignals gewählt, so nähert sich das Objekt einer der Anregungspositionen schneller als der anderen. Es erfolgt in diesem Fall eine kurvenartige Bewegung des Objekts.
- Durch eine entsprechende Wahl der Amplituden der Steuersignale kann für ein Objekt an einer bestimmten Objektposition, die nicht auf der Verbindungsgeraden zwischen den beiden angesteuerten Anregungselementen liegt, ein Bewegungswinkel zwischen der Bewegungsrichtung und der Verbindungsgerade vorgegeben werden. Eine entsprechende Wahl der Amplituden erlaubt eine freie Festlegung dieses Winkels zwischen einer linearen Bewegung auf den ersten der Anregungsbereiche zu und einer linearen Bewegung auf den zweiten der Anregungsbereichen zu. Der wählbare Winkelbereich kann zusätzlich erweitert werden, wenn eines der Anregungselemente als Dämpfelement betrieben wird, indem eine Phasenlage zwischen den Anregungen angepasst wird.
- Vorteilhaft umfasst der erfindungsgemäße Schwingförderer wenigstens drei der Anregungselemente, wobei die Anregungsposition des dritten Anregungselements von einer Verbindungsgerade zwischen den Anregungspositionen des ersten und des zweiten Anregungselements beabstandet ist. Der Schwingförderer kann somit wenigstens drei Anregungselemente aufweisen, die nicht auf einer gemeinsamen Geraden liegen. Durch Anregungselemente erzeugte Wanderwellen wirken im erfindungsgemäßen Schwingförderer anziehend. Durch das Vorsehen von wenigstens drei Anregungselementen wird ein Vieleck aufgespannt, dessen Ecken durch die Anregungspositionen gebildet werden. Innerhalb des Vielecks kann ein Objekt durch Vorgabe entsprechender Steuersignal an jede beliebige Position bewegt werden. Dabei können beliebig viele Anregungselemente vorgesehen werden. Zusätzlich können auf Verbindungsgeraden zwischen den Ecken weitere Anregungspositionen vorgesehen sein.
- Die Schwingungsplatte kann mehreckig, insbesondere rechteckig, mit mehreren Seiten sein, wobei randseitig im Bereich jeder der Seiten jeweils wenigstens eines der Anregungselemente angeordnet ist. Die Anregungspositionen können innerhalb der Plattenfläche der Schwingplatte und insbesondere benachbart zum Rand der Schwingplatte angeordnet sein. Insbesondere wenn an jeder Seite mehrere Anregungselemente vorgesehen sind, kann eine Bewegungsrichtung und ein Zielpunkt einer Bewegung für ein Objekt auf der Schwingplatte durch Anpassung der Steuersignale für die Anregungselemente im Wesentlichen frei bestimmt werden.
- Alternativ ist es möglich, dass die Schwingplatte im Wesentlichen rund oder elliptisch ist, wobei die Anregungselemente randseitig umlaufend angeordnet sind.
- In beiden beschriebenen Fällen können Anregungselemente alternativ nur an Teilen der Seiten bzw. an einem Abschnitt des Umfangs angeordnet sein.
- Die Ultraschallwandler können jeweils einen, insbesondere vorgespannten, mehrlagigen Piezoaktor umfassen. Mehrlagige Piezoaktoren sind besonders geeignet, um bereits bei relativ geringen Spannungen einen hohen Hub und/oder große Kräfte zu verursachen. Durch eine Vorspannung des Piezoaktors, also beispielsweise durch das Anordnen der Lagen des Pizeoaktors in einem Gehäuse, derart, dass der Piezoaktor ohne eine angelegte Spannung bereits komprimiert ist, können die bereits bei geringen Spannungen zur Verfügung stehenden Kräfte weiter erhöht werden. Das Gehäuse kann beispielsweise aus Keramik oder Metall gebildet sein.
- Der Piezoaktor kann jeweils zwischen der Schwingplatte und einem Gegengewicht angeordnet sein. Das Gegengewicht kann ausschließlich über den Piezoaktor bzw. das Gehäuse eines vorgespannten Piezoaktors mit der Schwingplatte verbunden sein und ansonsten frei schwingen. Insbesondere bei einem Betrieb des Piezoaktors bei einer Resonanzfrequenz des Systems aus Piezoaktor, Gegengewicht und insbesondere einem Kopplungselement, das den Piezoaktor mit der Schwingplatte verbindet, können bereits bei geringen Amplituden des Steuersignals große Schwingungsamplituden erreicht werden.
- Der Piezoaktor oder ein mit dem Piezoaktor fest verbundenes Koppelelement kann jeweils mit der Schwingplatte verklebt und/oder verschraubt und/oder formschlüssig verbunden sein. Alternativ wäre auch eine kraftschlüssige Verbindung zwischen dem Piezoaktor bzw. dem Koppelelement und der Schwingplatte möglich. Die Schwingplatte könnte beispielsweise durch eine am Koppelelement angeordnete Klemmeinrichtung geklemmt sein. Eine stabile Kopplung des Piezoaktors zur Schwingplatte ist wesentlich, um eine optimale Einkopplung der Schwingung in die Schwingplatte zu erreichen.
- Der erfindungsgemäße Schwingförderer kann wenigstens ein Dämpfelement umfassen und/oder die Schwingplatte selbst kann aus einem schwingungsdämpfenden Material gebildet sein, sodass die Schwingungsamplitude der Schwingplatte bei einer Anregung durch wenigstens eines der Anregungselemente mit zunehmendem Abstand von der dem Anregungselement zugeordneten Anregungspositionen in zumindest eine Richtung entlang der Förderoberfläche abfällt. Als schwingungsdämpfendes Material kann insbesondere ein Material mit hoher innerer Reibung, beispielsweise ein Kunststoff oder ein Elastomer genutzt werden.
- Das Dämpfelement kann an einer Seitenfläche und/oder randseitig an der Förderoberfläche und/oder randseitig an der der Förderoberfläche abgewandten Fläche der Schwingplatte angeordnet sein. Insbesondere kann ein flächiger Bereich der Seitenfläche, der Förderoberfläche oder der abgewandten Fläche mit einem schwingungsdämpfenden Material beschichtet sein oder eine Schicht aus schwingungsdämpfendem Material kann auf die entsprechende Fläche aufgebracht und beispielsweise mit ihr verklebt sein.
- Alternativ oder ergänzend ist es möglich, als Dämpfelement ein Dämpfelement vorzusehen, das in reibendem Kontakt mit dem Rand der Schwingplatte ist. In diesem Fall wird der Schwingplatte durch die Reibung Energie entzogen und die Schwingung wird somit ebenfalls gedämpft.
- Durch eine randseitige Dämpfung der Schwingungen der Schwingplatte wird zum einen erreicht, dass die Amplitude einer durch ein Anregungselement generierten Wanderwelle mit zunehmendem Abstand von der entsprechenden Anregungsposition abnimmt, zum anderen werden Reflexionen an den Rändern der Schwingplatte und daher die Ausbildung von stehenden Wellen zumindest teilweise unterdrückt.
- Das Dämpfelement kann insbesondere eine flächige Schicht aus einem schwingungsdämpfenden Material, beispielsweise einem Gummi oder einem Elastomer sein.
- Alternativ oder ergänzend ist es auch möglich, eines oder mehrere der Anregungselemente eines erfindungsgemäßen Schwingförderers derart anzusteuern, dass sie als Dämpfelement wirken. Wenigstens ein ausgewähltes der Anregungselemente kann derart durch die Steuereinrichtung steuerbar sein, dass es eine Schwingungsamplitude einer durch wenigstens ein weiteres der Anregungselemente erzeugten Schwingung der Schwingplatte an der dem ausgewählten Anregungselement zugeordneten Anregungsposition reduziert.
- Hierzu kann die Steuereinrichtung ausgebildet sein, das ausgewählte Anregungselement mit einem Steuersignal anzusteuern, das phasenstarr mit einer vorgegebenen Phasenlage zu dem Steuersignal des weiteren Anregungselements ist. Die Ausbreitungsgeschwindigkeit von Biege- bzw. Oberflächenwellen der Schwingplatte ist im Wesentlichen konstant. Somit folgt aus einer Anregung mit einer bestimmten Frequenz, Amplitude und Phase an der Anregungsposition des weiteren Anregungselements eindeutig eine Schwingungsamplitude, Phase und Frequenz an der Anregungsposition des ausgewählten Anregungselements. Die Phasenlage der Schwingungen an den verschiedenen Anregungspositionen ist ausschließlich von der Schwingungsfrequenz und der Ausbreitungsgeschwindigkeit der Welle auf der Schwingplatte abhängig. Durch Vorgabe eines passenden Phasenversatzes zwischen dem Steuersignal für das weitere Anregungselement und dem Steuersignal für das ausgewählte Anregungselement kann somit erreicht werden, dass das ausgewählte Anregungselement zu einer Schwingung angeregt wird, die gegenüber einer von dem weiteren Anregungselement einlaufenden Welle um 180° phasenversetzt ist und diese somit ganz oder teilweise aufhebt.
- Gleiches gilt, wenn eine Anregung der Schwingplatte durch mehrere weitere Anregungselemente mit der gleichen Frequenz erfolgt. Insbesondere wenn die Schwingplatte an mehreren weiteren Anregungspositionen sinusförmig angeregt wird, entsteht durch Addition der aufgrund der Laufzeiten phasenverschobenen Sinussignale an der Anregungsposition des ausgewählten Anregungselements wiederum eine Sinusschwingung mit der gleichen Frequenz. Die Phasenlage dieser Schwingung kann aus den Abständen der weiteren Anregungspositionen zu der ausgewählten Anregungsposition sowie der Frequenz und der Ausbreitungsgeschwindigkeit der Schwingung auf der Schwingplatte bestimmt werden.
- Alternativ ist es möglich, dass die Steuereinrichtung ausgebildet ist, eine Schwingung an der Anregungsposition des ausgewählten Anregungselements zu erfassen und das Steuersignal für das ausgewählte Anregungselement in Abhängigkeit der erfassten Schwingung zu bestimmen. Insbesondere kann die Schwingung an der Anregungsposition des ausgewählten Anregungselements durch das ausgewählte Anregungselement selbst erfasst werden. Dabei ist es möglich, dass das ausgewählte Anregungselement zunächst nicht angesteuert wird und durch die Steuereinrichtung an dem Anregungselement abfallende Spannungen gemessen werden. Insbesondere wenn das Anregungselement ein Ultraschallwandler ist, der einen Piezoaktor umfasst, sind die am Anregungselement abfallenden Spannungen im Wesentlich proportional zu einer Auslenkung der Schwingplatte an der Anregungsposition. Daher kann eine Schwingungsamplitude, Schwingungsfrequenz und Schwingungsphase an der Anregungsposition des ausgewählten Anregungselements gemessen werden und das Steuersignal kann derart bestimmt werden, dass es diese Schwingung kompensiert. Alternativ ist es möglich, die Erfassung der Schwingung und ein Dämpfen durch das ausgewählte Anregungselement gleichzeitig durchzuführen. Beispielsweise kann ein Regelkreis vorgesehen werden, der eine am Anregungselement abfallende Spannung auf im Wesentlichen 0 regelt und somit auch die Schwingungsamplitude an der Anregungsposition des ausgewählten Anregungselements im Wesentlichen auf 0 setzt.
- Zur Anregung von Schwingungen der Schwingplatte ist es vorteilhaft, wenn die Steuereinrichtung ein Steuersignal mit der Resonanzfrequenz des jeweiligen Anregungselements bereitstellt. Somit können relativ große Schwingungsamplituden bereits bei einem geringen Verstellweg beispielsweise eines Piezoaktors und somit mit relativ geringen Steuerspannungen erreicht werden.
- Alternativ oder ergänzend zur Nutzung von Wanderwellen zur Bewegung von Objekten können im erfindungsgemäßen Schwingförderer auch stehende Wellen der Schwingplatte, also Platteneigenformen, genutzt werden, um Objekte auf der Schwingplatte zu bewegen bzw. die Bewegung bestimmter Objekte zu unterdrücken. Daher ist es vorteilhaft, wenn durch die Steuereinrichtung derartige Steuersignale für die Anregungselement bereitstellbar sind, dass eine stehende Welle auf der Schwingplatte erzeugt wird. Eine entsprechende stehende Welle bzw. Platteneigenform weist insbesondere wenigstens einen Knoten bzw. wenigstens eine Knotenlinie auf der Schwenkplatte auf, an dem bzw. der im Wesentlichen keine Schwingung der Schwingplatte vorliegt. In diesem Fall erfolgt eine Bewegung von Objekten von Schwingungsbäuchen zu Schwingungsknoten. Dies kann insbesondere zur Separierung von Objekten bzw. zur Ansammlung von Objekten in bestimmten Bereichen der Schwingplatte genutzt werden.
- Die Steuersignale für die Anregungselemente, die zur Ausbildung von stehenden Wellen führen, können durch theoretische Vorberechnung bestimmt werden.
- Alternativ ist es möglich, entsprechende Steuersignale in einem vorangehenden Messprozess vor Nutzung des Schwingförderers zu bestimmen. Es ist jedoch auch möglich, die Steuersignale im laufenden Betrieb des Schwingförderers oder in Testintervallen, beispielsweise beim Beginn der Nutzung des Schwingförderers zu bestimmen. So können die Frequenzen von Steuersignalen eines oder mehrerer der Anregungselemente stufenweise oder kontinuierlich durchgefahren werden und durch eine Messung von Spannungen und insbesondere Strömen an den Anregungselementen oder weitere, beispielsweise optische Sensoren, können Frequenzen identifiziert werden, die zur Ausbildung von Platteneigenformen führen.
- Die Objekte, die durch den erfindungsgemäßen Schwingförderer bewegt werden, können Objekte sein, bei denen bestimmte Ausrichtungen gewünscht sind, beispielsweise elektrische Bauteile. Es ist daher vorteilhaft, wenn der Schwingförderer zusätzlich einen Aktor umfasst, bei dessen Ansteuerung durch die Steuereinrichtung die gesamte Schwingplatte senkrecht zur Förderoberfläche bewegt wird. Eine plötzliche Bewegung der gesamten Schwingplatte senkrecht zur Förderoberfläche kann zu einem "Flippen" von Objekten, d. h. zu einem Wechsel jener Fläche, mit der das Objekt auf der Fördereroberfläche aufliegt, führen.
- Der zusätzliche Aktor kann insbesondere ein elektromechanischer Aktor sein. Beispielsweise kann unterhalb oder oberhalb der Schwingplatte ein Elektromagnet vorgesehen sein und die Schwingplatte selbst oder ein mit der Schwingplatte verbundenes Element kann magnetisch sein.
- Durch den zusätzlichen Aktor werden insbesondere makroskopische Bewegungen über beispielsweise mehrere Millimeter ausgelöst. Die Anregung ist impulsartig, dennoch ist eine Anregungsfrequenz typischerweise deutlich unterhalb des Ultraschallbereichs. Beispielsweise kann ein Anregungszyklus des zusätzlichen Aktors wenigstens 100 µs, insbesondere wenigstens eine Millisekunde, beispielsweise 10 Millisekunden dauern. Alternativ ist es möglich, mehrere der Ultraschallwandler synchron anzusteuern, um eine im Wesentlichen einheitliche Bewegung der gesamten Schwingplatte zu erreichen. Die Ultraschallwandler weisen typischerweise einen relativ geringen Hub auf, es können jedoch sehr hohe Beschleunigungen an den Umkehrpunkten der Bewegung erreicht werden.
- Um eine Bewegung der Objekte im erfindungsgemäßen Schwingförderer zu überwachen, ist es vorteilhaft, Sensoren vorzusehen, die die Bewegung und/oder Position der Objekte erfassen. Beispielsweise können Kameras, Lichtschranken oder Ähnliches vorgesehen werden. Dabei ist es häufig wünschenswert, einen Sensor unterhalb der Schwingplatte anzubringen oder die Schwingplatte von einer Position unterhalb der Schwingplatte zu beleuchten, um eine besonders leichte optische Erfassung der Objekte durch Abschattung der Lichtquelle zu ermöglichen. Daher ist es vorteilhaft, wenn die Schwingplatte aus einem transparenten Material gebildet ist. Die Schwingplatte kann insbesondere aus transparentem Glas, Kunststoff oder einer transparenten Keramik gebildet sein. Als transparente Keramik kann beispielsweise kubisches ZrO2 oder Sinterkorund (Al2O3) genutzt werden.
- Neben dem Schwingförderer betrifft die Erfindung auch ein Verfahren zum Betrieb eines erfindungsgemäßen Schwingförderers, wobei durch die Steuereinrichtung jeweils ein separates Steuersignal an die Anregungselemente bereitgestellt wird, wodurch die Schwingplatte in eine Gesamtschwingung versetzt wird, durch die das auf der Förderoberfläche befindliche Objekt bewegt wird. Insbesondere werden an mehrere Anregungselemente Steuersignalen, die nicht konstant sind, bereitgestellt, so dass sich mehrere angeregte Schwingungen auf der Schwingplatte überlagern. Vorteilhaft werden die Anregungselemente mit Steuersignalen der gleichen Frequenz angesteuert.
- Die Steuersignale wenigstens zweier der Anregungselemente können derart vorgegeben werden, dass der Abstand des Objekts von den Anregungspositionen der derart angesteuerten Anregungselemente verringert wird. Beispielsweise können zwei Anregungselemente angesteuert werden, von deren Verbindungslinie ein Objekt beabstandet ist. Das Objekt kann sich dabei auf die Verbindungslinie zwischen den Anregungsbereichen der beiden Anregungselemente und somit auf beide Anregungspositionen zubewegen.
- Es ist möglich, dass sich wenigstens zwei Objekte auf der Förderoberfläche befinden, wobei die Steuersignale derart vorgegeben werden, dass die Objekte derart bewegt werden, dass ein Abstand zwischen den Objekten verringert oder vergrößert wird. Für eine Verringerung des Abstandes zwischen den Objekten kann beispielsweise nur einem einzigen der Anregungselemente ein nicht konstantes Steuersignal zugeführt werden. In diesem Fall bewegen sich die wenigstens zwei Objekte auf die genau eine Anregungsposition zu, womit sich ihr Abstand verringern kann. Werden hingegen mehrere der Anregungselemente zur Schwingungserzeugung angesteuert und die Objekte befinden sich in dem Bereich zwischen den Anregungspositionen, so können die Amplituden der Anregungen beispielsweise so gewählt werden, dass sich wenigstens eines der Objekte in Richtung eines ersten der Anregungselemente und wenigstens ein zweites der Objekte in Richtung eines zweiten die Anregungselemente bewegt.
- Im erfindungsgemäßen Verfahren kann als der Schwingförderer ein Schwingförderer mit wenigstens drei Anregungselementen verwendet werden, durch deren Anregungspositionen ein Viereck auf der Förderfläche aufgespannt wird, wobei die den Anregungselementen jeweils zugeführten Steuersignale derart vorgegeben werden, dass das Objekt an eine vorgegebene Position innerhalb des Vierecks bewegt wird. Insbesondere kann durch die Anregungselemente ein Dreieck oder ein Viereck aufgespannt werden. Die Steuersignale können insbesondere im Rahmen der Bewegung des Objekts zur vorgegebenen Position zeitlich variiert werden.
- Ergänzend oder alternativ ist es möglich, die Anregungselemente derart anzuordnen, dass entlang der Kanten eines Vielecks jeweils die Anregungspositionen mehrerer der Anregungselemente angeordnet sind. Eine Anordnung der Anregungselemente bzw. ihrer Anregungspositionen entlang der Kanten eine Vierecks ermöglicht insbesondere eine im Wesentlichen parallele Bewegung von mehreren Objekten auf der Schwingplatte, da durch die mehreren Anregungselemente entlang der Kante des Vierecks eine im Wesentlichen ebene Wanderwelle erzeugt werden kann.
- Weitere Vorteile und Einzelheiten der Erfindung ergeben sich aus den folgenden Ausführungsbeispielen sowie den zugehörigen Zeichnungen. Dabei zeigen schematisch:
- Fig. 1
- ein Ausführungsbeispiel eines erfindungsgemäßen Schwingförderers,
- Fig. 2
- eine geschnittene Ansicht entlang der Linie II des in
Fig. 1 gezeigten Ausführungsbeispiels, - Fig. 3
- ein weiteres Ausführungsbeispiel eines erfindungsgemäßen Schwingförderers,
- Fig. 4
- ein drittes Ausführungsbeispiel eines erfindungsgemäßen Schwingförderers,
- Fig. 5
- eine geschnittene Ansicht des Ausführungsbeispiels gemäß
Fig. 4 entlang der Linie V, - Fig. 6
- ein viertes Ausführungsbeispiel eines erfindungsgemäßen Schwingförderers, und
- Fig. 7
- ein fünftes Ausführungsbeispiel eines erfindungsgemäßen Schwingförderers.
- Die
Fig. 1 bis 7 zeigen zahlreiche Ausführungsbeispiele für erfindungsgemäße Schwingförderer. Ausführungsbeispiele für die erfindungsgemäßen Verfahren werden im Folgenden im Rahmen der Erläuterungen der Ausführungsbeispiele der erfindungsgemäßen Schwingförderer beschrieben. Eine Erläuterung eines Ausführungsbeispiels eines bestimmten Verfahrens im Zusammenhang mit einem konkreten Ausführungsbeispiel des Schwingförderers schränkt das entsprechende Verfahren nicht auf einen derartigen Schwingförderer ein. -
Fig. 1 zeigt ein Ausführungsbeispiel eines Schwingförderers zur zweidimensionalen Bewegung von Objekten. Zunächst wird anhand einer Draufsicht auf die Schwingplatte 1 die Bewegung der Objekte 2, 3, 4 und 5 auf der Schwingplatte 1 bei einer Anregung der Schwingplatte 1 an den Anregungspositionen 6 und 7 beschrieben. Die technische Umsetzung der Anregung wird später detailliert mit Bezug aufFig. 2 erläutert, die einen Schnitt des Schwungförderers gemäßFig. 1 entlang der Linie II zeigt. - Die Schwingplatte 1 wird an den Anregungspositionen 6 und 7 jeweils sinusförmig mit gleicher Frequenz angeregt. Da die Schwingplatte 1 aus einem schwingungsdämpfenden Material, beispielsweise transparentem Kunststoff, gebildet ist, werden durch die Anregungen jeweils Wanderwellen hervorgerufen, die eine jeweils ausgehend von der Anregungsposition 6 bzw. 7 mit zunehmender Entfernung abfallende Amplitude aufweisen. Die Ausbreitung dieser Wanderwellen ist in
Fig. 1 durch die konzentrischen Kreise 8 angedeutet. - Der Abstand des Objekts 2 von der Anregungsposition 6 ist wesentlich geringer als der Abstand des Objekts 2 zu der Anregungsposition 7. Daher hat die von der Anregungsposition 6 zum Objekt 2 laufende Wanderwelle an der Position des Objekts 2 eine weit größere Amplitude als die von der Anregungsposition 7 einlaufende Wanderwelle. Die Auswirkung der von der Anregungsposition 7 einlaufenden Wanderwelle kann also näherungsweise vernachlässigt werden. Das Objekt 2 wird in die Richtung 9 auf die Anregungsposition 6 zubewegt, da eine Objektbewegung auf einer durch eine Biege- bzw. Oberflächenwelle angeregten Schwingplatte stets entgegen der Ausbreitungsrichtung einer gedämpften Wanderwelle erfolgt. Entsprechend bewegt sich das Objekt 3 in die Richtung 10, auf die Anregungsposition 7 zu. Bei einer gleichzeitigen Anregung von Schwingungen an den Anregungspositionen 6 und 7 mit gleicher Amplitude können somit Ansammlungen von Objekten getrennt werden, da die Objekte abhängig von ihrer Objektposition in unterschiedliche Richtungen bewegt werden.
- Durch eine Anpassung der relativen Amplituden der an den Anregungspositionen 6 bzw. 7 eingekoppelte Wanderwellen kann der Punkt zwischen den Anregungspositionen 6 und 7, an dem sich die Bewegungsrichtung ändert, angepasst werden. Ein Schwingförderer gemäß
Fig. 1 erlaubt also eine einfache und flexible Separierung von Objekten. - Objekt 4 befindet sich in exakt gleichem Abstand zu den Anregungspositionen 6 und 7, ist jedoch von einer Verbindungsgeraden zwischen den Anregungspositionen 6 und 7 beabstandet. Durch das Einkoppeln einer Wanderwelle mit gleicher Amplitude an den Anregungspositionen 6 und 7 überlagern sich die resultierenden Wanderwellen, so dass die Schwingplatte 1 in eine Gesamtschwingung versetzt wird. An der Objektposition des Objekts 4 entspricht diese Gesamtschwingung einer einlaufenden Wanderwelle, die sich in Richtung des oberen Randes der Schwingplatte 1 ausbreitet. Entsprechend bewegt sich das Objekt 4 in die Richtung 11 senkrecht auf eine Verbindungsgerade zwischen den Anregungspositionen 6 und 7 zu. Durch eine Anpassung der Schwingungsamplituden der an den Anregungspositionen 6 und 7 eingekoppelten Schwingungen kann die Bewegungsrichtung 11 des Objekts 4 variiert werden. Erfolgt beispielsweise nur eine Anregung an der Anregungsposition 6, so bewegt sich das Objekt 4 auf die Anregungsposition 6 zu. Die Bewegungsrichtung 11 des Objekts 4 ist somit über einen weiten Winkelbereich durch eine Anpassung der Schwingungsamplituden an den Anregungspositionen 6, 7 anpassbar.
- Ist ein Objekt sowohl von einer Mittellinie zwischen den Anregungspositionen 6 und 7 als auch von der Verbindungsgerade der Anregungspositionen 6 und 7 beabstandet, wie beispielsweise das Objekt 5, so entspricht die resultierende Gesamtschwingung an der Objektposition des Objekts 5 einer Wanderwelle, die von einem Punkt der Verbindungsgeraden zwischen den Anregungspositionen 6 und 7 ausgeht. Somit wird das Objekt 5 in die Richtung 12 bewegt. Mit zunehmender Annäherung an die Verbindungsgerade zwischen den Anregungspositionen 6 und 7 ändert sich die Bewegungsrichtung 12 in Richtung der Anregungsposition 6. Das Objekt 5 führt bei einer konstanten Anregung an den Anregungspositionen 6 und 7 somit eine kurvenförmige Bewegung durch. Die Bewegungsrichtung 12 kann zudem jederzeit durch eine Anpassung der relativen Anregungsamplituden an den Anregungspositionen 6 und 7 angepasst werden, wie bereits zu Objekt 4 erläutert wurde.
-
Fig. 2 zeigt eine geschnittene Ansicht des inFig. 1 gezeigten Schwingförderers entlang der Linie II. Die Anregung von Schwingungen wird zunächst für die Anregungsposition 6 erläutert. Die Schwingplatte 1 ist an der Anregungsposition 6 mit einem Ultraschallwandler 13 gekoppelt. Der Ultraschallwandler umfasst einen Piezoaktor 14, der zwischen der Schwingplatte 1 und dem Gegengewicht 15 angeordnet ist. Die Kopplung des Piezoaktors mit der Schwingplatte 1 erfolgt über ein Koppelelement 16, das sowohl mit dem Piezoaktor 14 als auch mit der Schwingplatte 1 verklebt ist. Die Verbindung des Koppelelements 16 zu dem Piezoaktor 14 und/oder der Schwingplatte 1 könnte in alternativen Ausführungsformen beispielsweise auch durch ein Verschrauben oder eine formoder kraftschlüssige Kopplung erfolgen. - Der Piezoaktor 14 ist ein mehrlagiger, vorgespannter Piezoaktor, der in einem nicht gezeigten Gehäuse angeordnet ist, das die Piezokristalle des Piezoaktors vorspannt.
- Die Steuereinrichtung 17 stellt über den Anschluss 18 ein Massesignal und über den Anschluss 19 ein Steuersignal für den Piezoaktor 14 bereit. In Abhängigkeit der Spannung des Steuersignals dehnt sich der Piezoaktor 14 aus oder wird komprimiert. Wird durch die Steuereinrichtung 17 ein oszillierendes, insbesondere sinusförmiges, Signal vorgegeben, so schwingt das Gegengewicht 15 aufgrund der Ausdehnungsänderung des Piezoaktors 14 gegen die Schwingplatte 1 und erzeugt somit Schwingungen der Schwingplatte 1 an der Anregungsposition 6.
- Zusätzlich stellt die Steuereinrichtung 17 über den Anschluss 20 ein separates Steuersignal für das Anregungselement 21 bereit, durch das die Schwingplatte 1 an der Anregungsposition 7 zu Schwingungen anregbar ist.
- Die Steuereinrichtung 17 kann die Amplituden der an das Anregungselement 13 und das Anregungselemente 21 bereitgestellten Steuersignale unabhängig anpassen, um das Amplitudenverhältnis der an den Anregungspositionen 6 und 7 eingekoppelten Schwingungen zu steuern. Entsprechend kann durch die Steuereinrichtung 17 wie bereits zur
Fig. 1 erläutert, eine Bewegungsrichtung 9, 10, 11, 12 für die Objekte 2, 3, 4, 5 vorgegeben werden. - Zusätzlich ist es möglich, durch Anpassung der Phasenlage der Steuersignale für die Anregungselemente 13, 21 das Anregungselement 13 oder das Anregungselement 21 dämpfend zu betreiben, so dass eine jeweils vom anderen Anregungselement 13, 21 eingekoppelte Schwingung der Schwingplatte 1 gedämpft wird. Wird beispielsweise das Anregungselement 21 zur Dämpfung angesteuert, so wird im Bereich der Anregungsposition 7 eine von der Anregungsposition 6 einlaufende Wanderwelle zusätzlich gedämpft. Die resultierende Gesamtschwingung der Schwingplatte 1 führt somit zu einer Art abstoßenden Wirkung der Anregungsposition 7 für die Objekte 2, 3, 4 und 5. Somit wird eine zusätzliche Flexibilität bei der Bestimmung und der jeweiligen Bewegungsrichtung 9, 10, 11, 12 erreicht.
- Zur Dämpfung wird das Anregungselement 21 mit einem Steuersignal angesteuert, dessen Phasenlage bezüglich des Steuersignals für das Anregungselement 13 fest vorgegeben ist, und zwar so, dass die Anregung an der Anregungsposition 7 einer Schwingung durch die von der Anregungsposition 6 einlaufenden Wanderwelle entgegengesetzt ist. Die Phasenlage des Steuersignals wird aus einer bekannten Ausbreitungsgeschwindigkeit der Wanderwelle auf der Schwingplatte 1 und dem Abstand zwischen den Anregungspositionen 6 und 7 ermittelt.
- Alternativ wäre es möglich, diese Phasenlage zu messen. Hierzu wird zunächst ausschließlich das Anregungselement 13 mit einem Steuersignal angesteuert und über den Anschluss 20 wird durch die Steuereinrichtung 17 die am Piezoelement des Anregungselements 21 abfallende Spannung gemessen. Aus einer Phasenlage der abfallenden Spannung bezüglich der Phasenlage des Steuersignals für das Anregungselement 13 wird die Phasenlage für das dämpfende Steuersignal ermittelt.
- In einer weiteren alternativen Ausführungsform wäre es möglich, dass die Steuereinrichtung 17 um eine dämpfende Wirkung im Anregungsbereich 7 zu erreichen die Anregungsrichtung 21 derart ansteuert, dass die am Piezoelement abfallende Spannung durch einen Regelkreis auf im Wesentlichen 0 geregelt wird.
- Bei einigen Objekten ist es wünschenswert, die Fläche, mit der das Objekt auf der Schwingplatte 1 aufliegt, ändern zu können. Eine derartige Änderung der Auflagefläche ist insbesondere durch eine plötzliche Bewegung der gesamten Schwingplatte senkrecht zur Förderoberfläche möglich. Eine entsprechende senkrechte Bewegung könnte durch ein gleichzeitiges Ansteuern aller der Anregungselemente 13, 21 erreicht werden. Typischerweise ist für eine Änderung der Auflagefläche jedoch ein größerer Hub der Schwingplatte erforderlich, als er mit den Anregungselementen 13, 21 erreicht werden kann.
- Daher ist ein zusätzlicher Aktor 36 vorgesehen, der als Elektromagnet ausgebildet ist. Wird der Aktor 36 durch die Steuereinrichtung 17 bestromt, so wird ein an der Schwingplatte 1 befestigter Magnet 37 von dem Aktor 36 zunächst angezogen, wobei eine nicht gezeigte elastische Lagerung der Schwingplatte 1 komprimiert wird. Dieses plötzliche Anziehen des Permanentmagneten 37 führt zu einer plötzlichen Positionsänderung der Schwingplatte 1, womit die Objekte aufgrund ihrer Trägheit kurzfristig die Förderoberfläche verlassen.
- Bei einem "Zurückschnappen" der Schwingplatte 1 bei einer Unterbrechung der Bestromung des Aktors 36 durch die Steuereinrichtung 17 werden die Objekte plötzlich und stark in Richtung senkrecht zur Förderoberfläche erschüttert, wodurch die Auflagefläche verändert werden kann.
- In einem Schwingförderer gemäß
Fig. 3 ist zusätzlich zu den Anregungselementen 13, 21 an den Anregungspositionen 6, 7 ein weiteres Anregungselement vorgesehen, das in Abhängigkeit eines separaten Steuersignals die Schwingplatte 1 an der Anregungsposition 22 in Schwingung versetzen kann. Durch das Vorsehen der zusätzlichen Anregungsposition 22 kann ein Objekt, das sich auf der Schwingplatte 1 befindet, durch Bereitstellung entsprechender Steuersignale auch in Richtung der Anregungsposition 22 bzw. in Richtung der Verbindungslinien zwischen der Anregungsposition 22 und der Anregungsposition 6 bzw. der Anregungsposition 7 bewegt werden. Ein Objekt, das sich auf der Förderoberfläche der Schwingplatte 1 befindet, kann somit an jede Position im durch eine gestrichelte Linie angedeuteten Dreieck 23 bewegt werden. -
Fig. 4 zeigt ein weiteres Ausführungsbeispiel eines Schwingförderers zur zweidimensionalen Bewegung von Objekten auf der Förderoberfläche der Schwingplatte 1. Die Schwingplatte 1 ist rechteckförmig, wobei an den Seiten des Rechtecks jeweils mehrere Anregungsbereiche 24 mit zugeordneten Anregungselementen vorgesehen sind. Auf der Förderoberfläche sowie auf der der Förderoberfläche abgewandten Seite der Schwingplatte 1 ist randseitig zudem ein Dämpfelement 25, nämlich eine Schicht aus einem elastischen Material mit hoher innerer Reibung, beispielsweise Gummi, aufgeklebt. -
Fig. 5 zeigt eine geschnittene Darstellung des Schwingförderers gemäßFig. 4 entlang der Linie V. Das Anregungselement 28, das an der Anregungsposition 24 mit der Schwingplatte 1 gekoppelt ist, umfasst ein Gegengewicht 15, einen Piezoaktor 14 und ein Koppelelement 16. Der Aufbau und die Funktion des Anregungselements 28 entsprechen dem zuFig. 2 erläuterten Anregungselement 13. - Das Koppelelement 16 durchgreift in einem zentralen Bereich des Anregungsbereichs 24 die Schwingplatte 1 und ist seitlich dieses zentralen Bereichs über eine Abstandsplatte 26 und Schrauben 27 mit der Schwingplatte 1 verschraubt. Durch das Durchgreifen der Schwingplatte 1 wird das Anregungselement 28 gegen laterale Bewegungen in Richtung der Förderoberfläche stabilisiert. Durch die Verschraubung und die zusätzliche Stützung durch die Abstandsplatte 26 erfolgt eine sehr gute Schwingungskopplung zwischen dem Anregungselement 28 und der Schwingplatte 1.
- Die Nutzung des Dämpferelements 25 erfüllt zwei Funktionen. Durch eine randseitige Dämpfung der Schwingplatte 1 werden einerseits Reflexionen am Rand der Schwingplatte 1 nahezu vollständig unterbunden, womit die Ausbildung stehender Wellen auf der Schwingplatte 1 unterdrückt wird. Während, wie im Folgenden mit Bezug auf
Fig. 7 erläutert, stehende Welle bzw. Platteneigenformen in Schwingförderern vorteilhaft genutzt werden können, ermöglicht die Unterdrückung dieser stehenden Wellen eine besonders einfache Ansteuerung der Anregungselemente 28 des Schwingförderers. - Durch das Dämpfelement 25 und die Nutzung mehrerer relativ eng beabstandeter Anregungspositionen entlang der Ränder der Schwingplatte 1 wird zudem bei einer gleichen Ansteuerung der den Anregungspositionen 24 entlang einer der Seite der Schwingplatte 1 zugeordneten Anregungselemente 28 eine im Wesentlichen ebene Wanderwelle generiert, die sich von einer Seite der Schwingplatte 1 in Richtung der gegenüberliegenden Seite der Schwingplatte 1 ausbreitet. Dies führt dazu, dass Objekte auf der Förderoberfläche der Schwingplatte 1 im Wesentlichen unabhängig von ihrer Position parallel in die gleiche Richtung bewegt werden. Die Nutzung mehrerer Anregungspositionen entlang einer Seite einer Schwingplatte in Verbindung mit einer randseitigen Dämpfung der Schwingplatte 1 ermöglicht somit eine im Wesentlichen positionsunabhängige Bestimmung der Bewegungsrichtung für eines oder mehrere Objekte auf der Förderoberfläche der Schwingplatte 1. Bei anderen Ansteuerungen der den Anregungsbereichen 24 zugeordneten Anregungselement 28 kann auch bei dem in
Fig. 4 und5 gezeigten Schwingförderer eine objektpositionsabhängige Bestimmung der Bewegungsrichtung erfolgen, so dass Objekte auch separiert werden können. Im einfachsten Fall können die an zwei gegenüberliegenden Rändern der Schwingplatte 1 angeordneten Anregungselemente 28 jeweils zur Bereitstellung einer im Wesentlichen ebenen Wanderwelle angesteuert werden. Abhängig von der Position eines Objekts auf der Förderoberfläche und der relativen Anregungsamplitude werden Objekte somit in Richtung des einen oder des anderen Randes der Schwingplatte 1 bewegt. -
Fig. 6 zeigt ein weiteres Ausführungsbeispiel eines Schwingförderers. Die Form der Schwingplatte 1 ist oval und die Anregungselemente 24 sind randseitig umlaufend am Rand der Schwingplatte 1 angeordnet. Ansonsten entspricht der inFig. 6 gezeigten Schwingförderer in Aufbau und Funktion dem inFig. 4 und5 gezeigten Schwingförderer. -
Fig. 7 zeigt ein fünftes Ausführungsbeispiel eines Schwingförderers, bei dem zur Bewegung von Objekten Platteneigenformen genutzt werden. Hierzu werden durch eine Steuereinrichtung an die drei den Anregungspositionen 29 zugeordneten Anregungselemente Steuersignale mit einer Frequenz bereitgestellt, die einer Resonanzfrequenz einer Biegeschwingung der Schwingplatte 1 in Querrichtung inFig. 7 entspricht. Durch die synchrone Schwingungseinkopplung in den Anregungsbereichen 29 breitet sich von den Anregungsbereichen 29 zunächst eine im Wesentlichen ebene Welle in die Querrichtung aus. Die oberen und unteren Ränder der Schwingungsplatte 1 inFig. 7 können durch nichtgezeigte Dämpfungselemente zusätzlich bedämpft werden um Reflexionen zu unterdrücken. - Wird die ebene Welle durch die Schwingplatte 1 nur geringfügig gedämpft, so wird sie von den im Bild linken und rechten Rändern der Schwingplatte 1 reflektiert. Durch eine Überlagerung der Schwingungsanregung an den Anregungspositionen 29 und der reflektierten Wellen wird eine stehende Welle ausgebildet, die in den durch die Linien 31, 33 und 35 angedeuteten Bereichen Wellenbäuche aufweist und in den durch die Linien 32 und 34 angedeuteten Bereiche Knoten der Welle, d. h. Bereiche in denen durch die Anregung an den Anregungspositionen 29 keine Schwingung der Schwingplatte 1 erfolgt.
- Erfolgt keine Anregung einer Schwingung der Schwingplatte 1 an den Anregungspositionen 30, so führt dies zu einer Bewegung der Objekte auf die Linien 32, 34 zu. Erfolgt nun, wie zu den vorangehenden Ausführungsbeispielen erläutert eine Anregung an den Anregungspositionen 30 mit einer Frequenz, die keine Resonanzfrequenz der Schwingungsplatte 1 entspricht, insbesondere mit einer Resonanzfrequenz eines der jeweiligen Anregungsposition zugeordneten Anregungselements, so sind die Objekte insbesondere in Hochrichtung in
Fig. 7 bewegbar. Eine Bewegung in Querrichtung ist durch die Stabilisierung der Objekte im Bereich der Knotenlinien 32, 34 zumindest teilweise unterdrückt, so dass beispielsweise eine Aufwärtsbewegung der Objekte im Bereich der Linie 32 und eine Abwärtsbewegung der Objekte im Bereich der Linie 34 möglich ist, wobei eine Bewegung von Objekten zwischen den Bereichen der Linien 32 und 34 durch den Bauch der stehenden Welle im Bereich der Linie 33 unterdrückt ist.
Claims (22)
- Schwingförderer zur zweidimensionalen Bewegung von Objekten (2, 3, 4, 5), umfassend eine Schwingplatte (1), auf deren Förderoberfläche wenigstens ein Objekt (2, 3, 4, 5) durch Schwingungen der Schwingplatte (1) bewegbar ist, sowie wenigstens zwei Anregungselemente (13, 21, 28) zur Anregung von Schwingungen der Schwingplatte (1), dadurch gekennzeichnet, dass die Anregungselemente (13, 21, 28) an voneinander beabstandeten Anregungspositionen (6, 7, 22, 24, 29, 30) mit der Schwingplatte (1) gekoppelte Ultraschallwandler sind, durch die die Schwingplatte (1) an der jeweiligen Anregungsposition (6, 7, 22, 24, 29, 30) in Abhängigkeit eines jeweils separat durch eine Steuereinrichtung (17) an das jeweilige Anregungselement (13, 21, 28) bereitstellbaren jeweiligen Steuersignals zur Schwingung anregbar ist.
- Schwingförderer nach Anspruch 1, dadurch gekennzeichnet, dass die Anregungselemente (13, 21, 28) durch die Steuereinrichtung (17) derart ansteuerbar sind, dass durch eine Überlagerung der angeregten Schwingungen die Förderoberfläche in eine Gesamtschwingung versetzbar ist.
- Schwingförderer nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass er wenigstens drei der Anregungselemente (13, 21, 28) umfasst, wobei die Anregungsposition (6, 7, 22, 24, 29, 30) des dritten Anregungselements (13, 21, 28) von einer Verbindungsgerade zwischen den Anregungspositionen (6, 7, 22, 24, 29, 30) des ersten und des zweiten Anregungselements (13, 21, 28) beabstandet ist.
- Schwingförderer nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die Schwingplatte (1) mehreckig, insbesondere rechteckig, mit mehreren Seiten ist, wobei randseitig im Bereich jeder der Seiten jeweils wenigstens eines der Anregungselemente (13, 21, 28) angeordnet ist.
- Schwingförderer nach einem der Ansprüchen 1 bis 3, dadurch gekennzeichnet, dass die Schwingplatte (1) im Wesentlichen rund oder elliptisch ist, wobei die Anregungselemente (13, 21, 28) randseitig umlaufend angeordnet sind.
- Schwingförderer nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die Ultraschallwandler jeweils einen, insbesondere vorgespannten, mehrlagigen Piezoaktor (14) umfassen.
- Schwingförderer nach Anspruch 6, dadurch gekennzeichnet, dass der Piezoaktor (14) jeweils zwischen der Schwingplatte (1) und einem Gegengewicht (15) angeordnet ist.
- Schwingförderer Anspruch 6 oder 7, dadurch gekennzeichnet, dass der Piezoaktor (14) oder ein mit dem Piezoaktor (14) fest verbundenes Koppelelement (16) jeweils mit der Schwingplatte (1) verklebt und/oder verschraubt und/oder formschlüssig verbunden ist.
- Schwingförderer nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass der Schwingförderer (1) wenigstens ein Dämpfelement (25) umfasst und/oder die Schwingplatte (1) selbst aus einem schwingungsdämpfenden Material gebildet ist, sodass die Schwingungsamplitude der Schwingplatte (1) bei einer Anregung durch wenigstens eines der Anregungselemente (13, 21, 28) mit zunehmendem Abstand von der dem Anregungselement (13, 21, 28) zugeordneten Anregungsposition (6, 7, 22, 24, 29, 30) in zumindest eine Richtung entlang der Förderoberfläche abfällt.
- Schwingförderer nach Anspruch 9, dadurch gekennzeichnet, dass das Dämpfelement (25) an einer Seitenfläche und/oder randseitig an der Förderoberfläche und/oder randseitig an der der Förderoberfläche abgewandten Fläche der Schwingplatte (1) angeordnet ist.
- Schwingförderer nach Anspruch 9 oder 10, dadurch gekennzeichnet, dass das Dämpfelement (25) eine flächige Schicht aus einem schwingungsdämpfenden Material ist.
- Schwingförderer nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass wenigstens ein ausgewähltes der Anregungselemente (13, 21, 28) derart durch die Steuereinrichtung steuerbar ist, dass es eine Schwingungsamplitude einer durch wenigstens ein weiteres der Anregungselemente (13, 21, 28) erzeugten Schwingung der Schwingplatte (1) an der dem ausgewählten Anregungselement (13, 21, 28) zugeordneten Anregungsposition (6, 7, 22, 24, 29, 30) reduziert.
- Schwingförderer nach Anspruch 12, dadurch gekennzeichnet, dass die Steuereinrichtung (17) ausgebildet ist, das ausgewählte Anregungselement (13, 21, 28) mit einem Steuersignal anzusteuern, dass phasenstarr mit einer vorgegebenen Phasenlage zu dem Steuersignal des weiteren Anregungselements (13, 21, 28) ist.
- Schwingförderer nach Anspruch 12, dadurch gekennzeichnet, dass die Steuereinrichtung (17) ausgebildet ist, eine Schwingung an der Anregungsposition (6, 7, 22, 24, 29, 30) des ausgewählten Anregungselements (13, 21, 28) zu erfassen und das Steuersignal für das ausgewählte Anregungselement (13, 21, 28) in Abhängigkeit der erfassten Schwingung zu bestimmen.
- Schwingförderer nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass durch die Steuereinrichtung (17) ein Steuersignals mit der Resonanzfrequenz des jeweiligen Anregungselements (13, 21, 28) bereitstellbar ist.
- Schwingförderer nach einem der Ansprüche 1 bis 14, dadurch gekennzeichnet, das durch die Steuereinrichtung (17) derartige Steuersignale für die Anregungselemente (13, 21, 28) bereitstellbar sind, dass eine stehende Welle auf der Schwingplatte (1) erzeugt wird.
- Schwingförderer nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass er zusätzlich einen Aktor (36) umfasst, bei dessen Ansteuerung durch die Steuerreinrichtung (17) die gesamte Schwingplatte (1) senkrecht zur Förderoberfläche bewegt wird.
- Schwingförderer nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass die Schwingplatte (1) aus einem transparenten Material gebildet ist.
- Verfahren zum Betrieb eines Schwingförderers nach einem der vorangehenden Ansprüche, dadurch gekennzeichnet, dass durch die Steuereinrichtung (17) jeweils ein separates Steuersignal an die Anregungselemente (13, 21, 28) bereitgestellt wird, wodurch die Schwingplatte (1) in eine Gesamtschwingung versetzt wird, durch die das auf der Förderoberfläche befindliche Objekt (2, 3, 4, 5) bewegt wird.
- Verfahren nach Anspruch 19, dadurch gekennzeichnet, dass die Steuersignale wenigstens zweier der Anregungselemente (13, 21, 28) derart vorgegeben werden, dass der Abstand des Objekts (2, 3, 4, 5) von den Anregungspositionen (6, 7, 22, 24, 29, 30) der derart angesteuerten Anregungselemente (13, 21, 28) verringert wird.
- Verfahren nach Anspruch 19 oder 20, dadurch gekennzeichnet, dass sich wenigstens zwei Objekte auf der Förderoberfläche befinden, wobei die Steuersignale derart vorgegeben werden, dass die Objekte (2, 3, 4, 5) derart bewegt werden, dass ein Abstand zwischen den Objekten (2, 3, 4, 5) verringert oder vergrößert wird.
- Verfahren nach einem der Ansprüche 19 bis 21 , dadurch gekennzeichnet, dass als der Schwingförderer ein Schwingförderer mit wenigstens drei Anregungselementen (13, 21, 28) verwendet wird, durch deren Anregungspositionen (6, 7, 22, 24, 29, 30) ein Vieleck auf der Förderfläche aufgespannt wird, wobei die den Anregungselementen (13, 21, 28) jeweils zugeführten Steuersignal derart vorgegeben werden, dass das erste Objekt (2, 3, 4, 5) an eine vorgegebene Position innerhalb des Vielecks bewegt wird.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014111168.0A DE102014111168A1 (de) | 2014-08-06 | 2014-08-06 | Schwingförderer zur zweidimensionalen Bewegung von Objekten sowie Verfahren zum Betrieb des Schwingförderers |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2982618A1 true EP2982618A1 (de) | 2016-02-10 |
Family
ID=53524663
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15175698.8A Withdrawn EP2982618A1 (de) | 2014-08-06 | 2015-07-07 | Schwingförderer zur zweidimensionalen bewegung von objekten sowie verfahren zum betrieb des schwingförderers |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20160039614A1 (de) |
| EP (1) | EP2982618A1 (de) |
| CA (1) | CA2897698A1 (de) |
| DE (1) | DE102014111168A1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021053176A3 (de) * | 2019-09-18 | 2021-07-29 | Martin Frauenfelder | Verfahren zum fördern von schüttgut-teilen sowie ein gerät zur durchführung des verfahrens |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020202039A1 (en) | 2019-04-05 | 2020-10-08 | Blue Sky Ventures (Ontario) Inc. | Vibratory conveyor for conveying items and related filling machine and methods |
| DE102019119911A1 (de) * | 2019-07-23 | 2021-01-28 | Herrmann Ultraschalltechnik Gmbh & Co. Kg | Verfahren und Generator zur Charakterisierung eines Schwingsystems |
| DE102020106350B4 (de) * | 2020-03-09 | 2021-09-16 | IMA-TEC GmbH | Fördergerät |
| CN115924424B (zh) * | 2022-11-30 | 2025-08-19 | 南京航空航天大学 | 一种压电换能器驱动的旋转型送料装置及其工作方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61124412A (ja) * | 1984-11-16 | 1986-06-12 | Tdk Corp | 搬送装置 |
| DE4328750C1 (de) * | 1993-08-26 | 1994-12-15 | Wagner Int | Vorrichtung zum Fördern von fließfähigem Material |
| US5810155A (en) * | 1993-07-12 | 1998-09-22 | Kaijo Corporation | Object levitating apparatus object transporting apparatus and object levitating bearing along with an object levitating process and object transporting process |
| US20020054812A1 (en) * | 2000-09-20 | 2002-05-09 | Masaki Takasan | Object levitating apparatus and method for controlling the same |
| US20020088280A1 (en) * | 2000-10-26 | 2002-07-11 | Masaki Takasan | Apparatus for transporting levitated objects |
| DE10261659A1 (de) | 2002-12-20 | 2004-07-15 | Fachhochschule Jena | Anordnung zur Bewegung von Gegenständen unabhängig voneinander in einer Ebene |
| US20070221480A1 (en) * | 2006-03-16 | 2007-09-27 | Northwestern University | Parts manipulation method and apparatus |
| WO2010131509A1 (ja) * | 2009-05-14 | 2010-11-18 | 国立大学法人 東京工業大学 | 非接触搬送装置、非接触搬送方法及び非接触搬送システム |
| EP2522407A1 (de) * | 2008-11-14 | 2012-11-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Transport eines Objekts über eine Oberfläche |
| DE102012211103A1 (de) * | 2012-06-28 | 2014-01-02 | Robert Bosch Gmbh | Piezoelement sowie Verfahren zum Kontaktieren eines Piezoelements |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4216050C2 (de) * | 1992-05-15 | 1995-05-24 | Daimler Benz Ag | Ultraschallwanderwellenmotor mit formschlüssiger Anregung von Wanderwellen |
| US5647477A (en) * | 1994-09-19 | 1997-07-15 | Kabushiki Kaisha Toshiba | Magnetic non-contact transport system |
-
2014
- 2014-08-06 DE DE102014111168.0A patent/DE102014111168A1/de not_active Withdrawn
-
2015
- 2015-07-07 EP EP15175698.8A patent/EP2982618A1/de not_active Withdrawn
- 2015-07-17 CA CA2897698A patent/CA2897698A1/en not_active Abandoned
- 2015-08-04 US US14/817,419 patent/US20160039614A1/en not_active Abandoned
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61124412A (ja) * | 1984-11-16 | 1986-06-12 | Tdk Corp | 搬送装置 |
| US5810155A (en) * | 1993-07-12 | 1998-09-22 | Kaijo Corporation | Object levitating apparatus object transporting apparatus and object levitating bearing along with an object levitating process and object transporting process |
| DE4328750C1 (de) * | 1993-08-26 | 1994-12-15 | Wagner Int | Vorrichtung zum Fördern von fließfähigem Material |
| US20020054812A1 (en) * | 2000-09-20 | 2002-05-09 | Masaki Takasan | Object levitating apparatus and method for controlling the same |
| US20020088280A1 (en) * | 2000-10-26 | 2002-07-11 | Masaki Takasan | Apparatus for transporting levitated objects |
| DE10261659A1 (de) | 2002-12-20 | 2004-07-15 | Fachhochschule Jena | Anordnung zur Bewegung von Gegenständen unabhängig voneinander in einer Ebene |
| US20070221480A1 (en) * | 2006-03-16 | 2007-09-27 | Northwestern University | Parts manipulation method and apparatus |
| EP2522407A1 (de) * | 2008-11-14 | 2012-11-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Transport eines Objekts über eine Oberfläche |
| WO2010131509A1 (ja) * | 2009-05-14 | 2010-11-18 | 国立大学法人 東京工業大学 | 非接触搬送装置、非接触搬送方法及び非接触搬送システム |
| DE102012211103A1 (de) * | 2012-06-28 | 2014-01-02 | Robert Bosch Gmbh | Piezoelement sowie Verfahren zum Kontaktieren eines Piezoelements |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021053176A3 (de) * | 2019-09-18 | 2021-07-29 | Martin Frauenfelder | Verfahren zum fördern von schüttgut-teilen sowie ein gerät zur durchführung des verfahrens |
| CN114401913A (zh) * | 2019-09-18 | 2022-04-26 | 马丁·弗劳恩菲尔德 | 散材传送方法及实施该方法的装置 |
| CN114401913B (zh) * | 2019-09-18 | 2024-10-29 | 马丁·弗劳恩菲尔德 | 散材传送方法及实施该方法的装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102014111168A1 (de) | 2016-02-25 |
| US20160039614A1 (en) | 2016-02-11 |
| CA2897698A1 (en) | 2016-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2982618A1 (de) | Schwingförderer zur zweidimensionalen bewegung von objekten sowie verfahren zum betrieb des schwingförderers | |
| DE10107327B4 (de) | Zur Verhinderung einer unnötigen Oszillation geeigneter Winkelgeschwindigkeitssensor | |
| DE60038137T2 (de) | Dreidimensionale Kammstruktur | |
| EP1656705B1 (de) | Linearer ultraschallmotor | |
| EP1267425A2 (de) | Piezoelektrisches Stellelement | |
| DE102015004208B4 (de) | Verfahren zur Steuerung eines Ultraschallmotors und entsprechende Steueranordnung | |
| EP2497129B1 (de) | Aktuator | |
| EP2962965B1 (de) | Schwingförderer | |
| DE102012101688A1 (de) | Verfahren zur Ansteuerung einer Mehraktor-Antriebsvorrichtung | |
| DE60221760T2 (de) | Steuerungsvorrichtung und Verfahren für einen elektromagnetisch angetriebenen Aktuator | |
| EP3469703B1 (de) | Ultraschallmotor | |
| DE102013206396A1 (de) | Mikroaktuatoranordnung zur Ablenkung elektromagnetischer Strahlung | |
| DE102008058484A1 (de) | Hochpräziser Ultraschallmotor | |
| EP2824824A1 (de) | Antriebsvorrichtung | |
| DE102013223937B4 (de) | Mikrospiegelanordnung | |
| EP2316161B1 (de) | Verfahren und vorrichtung zum erzeugen von elektrischer energie aus einer mechanischen anregungsschwingung | |
| EP2608286B1 (de) | Ultraschallaktor | |
| WO2008135350A2 (de) | Piezoelektrische antriebsvorrichtung | |
| DE102017215939B4 (de) | Vorrichtung und Verfahren zum Steuern einer Schwingungseinrichtung | |
| DE112015001953T5 (de) | Winkelgeschwindigkeitssensor | |
| EP2095441B1 (de) | Ultraschallantrieb | |
| EP2467924B1 (de) | Frequenzabstimmbarer resonator und verfahren zum betreiben eines solchen | |
| DE19648726C2 (de) | Piezoelektrisches Antriebselement | |
| DE102015103164B4 (de) | Scanvorrichtung mit wenigstens einer eindimensional scannenden Scaneinheit | |
| EP3245676A1 (de) | Verfahren und vorrichtung zur ansteuerung eines elektromechanischen elements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20160810 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| 17Q | First examination report despatched |
Effective date: 20170216 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Effective date: 20170712 |