JP2004176790A - ハイブリッド変速機の制御装置 - Google Patents
ハイブリッド変速機の制御装置 Download PDFInfo
- Publication number
- JP2004176790A JP2004176790A JP2002342572A JP2002342572A JP2004176790A JP 2004176790 A JP2004176790 A JP 2004176790A JP 2002342572 A JP2002342572 A JP 2002342572A JP 2002342572 A JP2002342572 A JP 2002342572A JP 2004176790 A JP2004176790 A JP 2004176790A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- torque
- generator
- control
- rotation speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2054—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed by controlling transmissions or clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H3/00—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion
- F16H3/44—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion
- F16H3/72—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously
- F16H3/727—Toothed gearings for conveying rotary motion with variable gear ratio or for reversing rotary motion using gears having orbital motion with a secondary drive, e.g. regulating motor, in order to vary speed continuously with at least two dynamo electric machines for creating an electric power path inside the gearing, e.g. using generator and motor for a variable power torque path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/14—Acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/427—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/429—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/443—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/48—Drive Train control parameters related to transmissions
- B60L2240/486—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/10—Temporary overload
- B60L2260/16—Temporary overload of electrical drive trains
- B60L2260/167—Temporary overload of electrical drive trains of motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/083—Torque
- B60W2510/084—Torque change rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/081—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/06—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
- F16H37/08—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing
- F16H37/10—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts with differential gearing at both ends of intermediate shafts
- F16H2037/103—Power-split transmissions with each end of a CVT connected or connectable to a planetary gear set having four or more connections, e.g. a Ravigneaux set
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Sustainable Development (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Energy (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Multiple Motors (AREA)
- Arrangement Of Transmissions (AREA)
- Structure Of Transmissions (AREA)
Abstract
【解決手段】S1では、モータ/ジェネレータMG1をトルク制御して、モータ/ジェネレータMG2を回転数制御する。S2で、回転数制御されているモータ/ジェネレータMG2のトルクTm2が上下限値間の値から外れた飽和状態になったと判定する場合、S3〜S5において、モータ/ジェネレータMG1をトルク制御から回転数制御に切り替えて上記の飽和を回避すると共にモータ/ジェネレータMG2を回転数制御からトルク制御に切り替える。S6で、上記の切り換えにより回転数制御されることになったモータ/ジェネレータMG1のトルクTm1が飽和状態であると判定する場合は、S7、S5およびS1において、モータ/ジェネレータMG1を回転数制御からトルク制御に切り替えて上記の飽和を回避すると共にモータ/ジェネレータMG2をトルク制御から回転数制御に切り替える。
【選択図】 図6
Description
【発明の属する技術分野】
本発明は、エンジン等の原動機とモータ/ジェネレータとを搭載したハイブリッド車両に有用なハイブリッド変速機、特に、これら原動機とモータ/ジェネレータとの間における差動装置により無段変速動作を行わせることが可能なハイブリッド変速機の制御装置に関するものである。
【0002】
【従来の技術】
この種ハイブリッド変速機としては、例えば特許文献1に記載のように、共線図上に配置される回転メンバとして4個の回転メンバを有した2自由度・4要素の差動装置を具え、これら回転メンバにそれぞれ原動機からの入力、駆動系への出力、および2個のモータ/ジェネレータを結合したものが知られている。
【0003】
【特許文献1】
特開2000−310131号公報
【0004】
このような差動装置を用いたハイブリッド変速機においては、出力の回転数(車速VSP)が判っている場合、入力(エンジン)および2個のモータ/ジェネレータの3個の回転数のうちの1個を決定することにより他の回転メンバの全ての回転数が決まり、変速比も決まる。
その意味で、入力(エンジン)および2個のモータ/ジェネレータのうちの1つを回転数制御することは変速比を制御することに等価である。
一方、共線図上における4個の回転メンバのトルクに関する相関関係については、2つの回転メンバのトルクを決めることにより、回転速度関係によらず残る2つの回転メンバのトルク値が決まる。
【0005】
ところで、トルク制御などの応答性や制御精度に関してはエンジンよりもモータ/ジェネレータの方が優れているため、
エンジンは例えば回転速度に応じた目標トルクを実現するような定トルク制御を行わせ、
変速比の制御に当っては一方のモータ/ジェネレータを、回転数検出手段により検出した実回転数が、目標変速比から決まる目標回転数に一致するよう回転数制御し、
変速機出力トルクの制御に当っては他方のモータを、トルク検出手段により検出した実トルクが、共線図上のトルクバランス式とエンジントルクから決まる目標トルクに一致するようトルク制御することが、先の特許文献1における [0022]−[0026]に記載されている。
【0006】
【発明が解決しようとする課題】
しかし、このように2つのモータ/ジェネレータのうち、一方のモータ/ジェネレータを回転数指令に応答させて回転数制御することにより変速比制御に用い、他方のモータ/ジェネレータをトルク指令に応答させてトルク制御することにより駆動力制御に用いる場合、以下のような問題がある。
【0007】
つまり、回転数制御しているモータ/ジェネレータのトルクが予期せぬ外乱や計算誤差などにより変動し、目標変速比とそのときのトルクバランスを計算する段階ではトルク限界の範囲内に入るとされた場合でも、実際に制御した場合に当該モータ/ジェネレータのトルクがトルク限界を越えるような場合がある。
このとき当該モータ/ジェネレータの制御手段は、モータ/ジェネレータ自体の保護を目的として実トルクを限界値に制限するが、回転数制御のためのトルクが不足して回転数制御が不能になってしまう。
これにより変速比が目標の変速比からずれてしまうため、正確な駆動力制御が出来ないのはもとより、速度制御不能となったモータ/ジェネレータの回転数が上昇し、場合によっては所謂過回転状態になり、耐久性の点で不利益を被るという問題がある。
【0008】
図8に示すような共線図で表されるハイブリッド変速機について上記の問題を以下に検証する。
なお図8は、共線図上に配置される回転メンバとして4個の回転メンバSs,R,C,Sdを有する4要素・2自由度の差動装置を具え、これら回転メンバのうち、共線図上の内側に位置する2個の回転メンバR,Cにそれぞれエンジン(ENG)からの入力、および車輪駆動系への出力(Out)を結合し、共線図上の外側に位置する2個の回転メンバSs,Sdにそれぞれ2個のモータ/ジェネレータMG1,MG2を結合したハイブリッド変速機の共線図で、
α,βは、差動装置を構成する遊星歯車組のギヤ比を、入出力間の距離を「1」とした場合の比として示し、
エンジンENGの回転数をNe、トルクをTeで、また、変速機の出力回転数をNo、トルクをToで、更に、モータ/ジェネレータMG1の回転数をNm1、トルクをTm1で、また、モータ/ジェネレータMG2の回転数をNm2、トルクをTm2で示すものである。
【0009】
エンジンENGを前記した通りトルク制御している間に、モータ/ジェネレータMG1,MG2のうち、モータ/ジェネレータMG1をトルク制御することにより出力制御を行い、モータ/ジェネレータMG2を回転数制御することにより無段変速を行っている場合につき考察する。
トルク制御中のエンジンENGの実トルクが外乱などにより、図8に示すごとくトルク指令よりdTeだけ誤差を持ったとすると、モータ/ジェネレータMG1のトルクTm1はこの誤差を考慮していないトルク指令によりトルク制御されているので不変であるものの、上記の誤差によるトルクバランスの変化は出力トルクToと、回転数制御中におけるモータ/ジェネレータMG2のトルクに影響を及ぼす。
【0010】
具体的には、出力トルクToがdTo={(1+β)/β}× dTeだけ増加し、モータ/ジェネレータMG2のトルクTm2がdTm2=(1/β)× dTeだけ増加する。
このときモータ/ジェネレータMG2のトルク増大分dTm2により当該回転数制御中のモータ/ジェネレータのトルクが上限値および下限値間からはみ出して限界値を越えた飽和状態になると、モータ/ジェネレータMG2は回転数Nm2を維持することができず、二点鎖線で例示するように低下する。
かかるモータ/ジェネレータMG2の回転低下により、図8に実線で示すレバー(勾配が変速状態を表す)が出力回転数Noの周りに二点鎖線で示す方向へ回動される結果、エンジンENGの回転数Neが上昇してしまうため、出力トルクToの増大により負荷によっては車両が加速されることとなり、実線で示すレバー状態から二点鎖線で示すレバー状態への予期せぬ変速を行ってしまうし、上記したように出力トルクToもdToだけ増大して所望のものとは異なってしまう。
【0011】
特に、前記の特許文献1に記載のようなハイブリッド変速機、つまり2個のモータ/ジェネレータを共通なバッテリにモータ駆動制御装置を介して接続し、変速比(=エンジン回転数と出力回転数の比)に応じて一方のモータ/ジェネレータを発電機として用い、他方のモータ/ジェネレータをモータとして用いることによりバッテリへの充放電電力を小さく、或いは0にする(発電電力を全てモータ駆動に消費するダイレクト配電)ようにしたハイブリッド変速機にあっては、常に一方のモータ/ジェネレータが低速度で大トルク、他方のモータ/ジェネレータが高速度で低トルクとなる関係にあり、回転数制御中で低速度のモータ/ジェネレータのトルクが飽和し易く、また、トルク制御中で高速度のモータ/ジェネレータの回転数が飽和し易いことから、上記の問題が一層顕著になる。
【0012】
上記の問題解決のため、上記変速比制御の誤差を検知してトルク制御されているモータ/ジェネレータMG1のトルク指令を操作するなどの処置では、
(1)変速比の誤差が発生してからの対処であることから時間的に遅れが出るため、過渡的な変速比の変動を完全には防ぐことができず、燃費悪化や操作フィーリングの悪化などの問題が発生したり、
(2)上記の処置が通常の制御ループでの処理ではなく、付け加えた非線形な制御系であるため、動作の設計が困難であったり、
(3)付け加えた制御系の動作と、本来の駆動力制御との干渉を防ぐことが困難である、
といったような新たな問題が発生して、良好な解決策とはなり得ない。
【0013】
本発明は、回転数制御中にトルクが飽和したモータ/ジェネレータをトルク制御に切り替えてトルクの飽和を解消すると共に、他方のモータ/ジェネレータはトルクの飽和に対して余裕があるから回転数制御に切り替え、これによりトルクの飽和に伴う前記予期せぬ変速に関した問題を解消し得るハイブリッド変速機の制御装置を提案することを目的とする。
【0014】
なお前記の問題は、トルク制御中のモータ/ジェネレータの回転数が飽和した場合においても同様に生ずる。
この場合は、回転数制御しているモータ/ジェネレータの回転数指令を、トルク制御しているモータ/ジェネレータの実回転数が飽和しないように逆算して補正するといった付加的な制御則を用いて問題解決を図る必要があるが、
本発明はこれに代えて、トルク制御中に回転数が飽和したモータ/ジェネレータを回転数制御に切り替えることにより回転数の飽和を解消すると共に、他方のモータ/ジェネレータは回転数の飽和に対して余裕があるからトルクに切り替え、これにより回転数の飽和に伴う予期せぬ変速に関した問題を解消し得るハイブリッド変速機の制御装置をも提案することを目的とする。
【0015】
【課題を解決するための手段】
前者の目的のため本発明によるハイブリッド変速機の制御装置は、請求項1に記載のごとく、
前記した型式のハイブリッド変速機において、
回転数制御されている一方のモータ/ジェネレータのトルクがトルク限界を超えて飽和するとき、このモータ/ジェネレータを回転数制御からトルク制御に切り替え、
同時に、トルク制御されていた他方のモータ/ジェネレータをトルク制御から回転数制御に切り替えるよう構成したものである。
【0016】
後者の目的のため本発明によるハイブリッド変速機の制御装置は、請求項3に記載のごとく、
前記した型式のハイブリッド変速機において、
トルク制御されている他方のモータ/ジェネレータの回転数が回転数限界を超えて飽和するとき、このモータ/ジェネレータをトルク制御から回転数制御に切り替え、
同時に、回転数制御されていた一方のモータ/ジェネレータをトルク制御に切り替えるよう構成したものである。
【0017】
【発明の効果】
請求項1に記載の本発明によれば、回転数制御中にトルクが飽和したモータ/ジェネレータを回転数制御からトルク制御に切り替えて出力制御に資するからトルクの飽和を解消することができる。
同時に、トルク制御中のモータ/ジェネレータは変速制御用に回転数制御に切り替えるが、このモータ/ジェネレータはトルクの飽和に対して余裕があるからトルクの飽和を生ずることはない。
よって何れのモータ/ジェネレータもトルクの飽和を生ずることがなく、トルクの飽和に伴う前記した予期せぬ変速に関する問題を解消することができる。
【0018】
請求項3に記載の本発明によれば、トルク制御中に回転数が飽和したモータ/ジェネレータをトルク制御から回転数制御に切り替えて変速制御に資するから回転数の飽和を解消することができる。
同時に、回転数制御中のモータ/ジェネレータは出力制御用にトルク制御に切り替えるが、このモータ/ジェネレータは回転数の飽和に対して余裕があるから回転数の飽和を生ずることはない。
よって何れのモータ/ジェネレータも回転数の飽和を生ずることがなく、回転数の飽和に伴う予期せぬ変速に関した問題を解消することができる。
【0019】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づき詳細に説明する。
図1は、本発明の一実施の形態になる制御装置を適用可能なハイブリッド変速機を例示し、これを本実施の形態においては、前輪駆動車(FF車)用のトランスアクスルとして用いるのに有用な以下に詳述する構成となす。
【0020】
図において1は変速機ケースを示し、該変速機ケース1の軸線方向(図の左右方向)右側(エンジンENGに近い前側)にラビニョオ型プラネタリギヤセット2を、また図の左側(エンジンENGから遠い後側)に例えば複合電流2層モータ4を可とするモータ/ジェネレータ組を内蔵する。
これらラビニョオ型プラネタリギヤセット2および複合電流2層モータ4は変速機ケース1の主軸線上に同軸に配置するが、この主軸線からオフセットさせて平行に配置したカウンターシャフト5およびディファレンシャルギヤ装置6をも変速機ケース1内に内蔵させる。
【0021】
ラビニョオ型プラネタリギヤセット2は、ロングピニオンP1およびリングギヤRを共有するシングルピニオン遊星歯車組7およびダブルピニオン遊星歯車組8の組み合わせになり、シングルピニオン遊星歯車組7はサンギヤSsにロングピニオンP1を噛合させた構造とし、ダブルピニオン遊星歯車組8はサンギヤSd、リングギヤRおよびロングピニオンP1の他に、大径のショートピニオンP2を具え、ショートピニオンP2をサンギヤSdおよびリングギヤRに噛合させると共にロングピニオンP1にも噛合させた構造とする。
そして遊星歯車組7,8のピニオンP1,P2を全て、共通なキャリアCにより回転自在に支持する。
【0022】
以上の構成になるラビニョオ型プラネタリギヤセット2は、サンギヤSd、サンギヤSs、リングギヤR、およびキャリアCの4個の回転メンバを主たる要素とし、これら4個の回転メンバのうち2個のメンバの回転速度を決定すると他のメンバの回転速度が決まる2自由度の差動装置を構成する。
そして4個の回転メンバの回転速度順は、図2の共線図により示した通りサンギヤSs、リングギヤR、キャリアC、サンギヤSdの順番である。
なお差動装置は、本実施の形態で用いるラビニョオ型プラネタリギヤセット2に限られず、任意のものを用いることができるのは言うまでもない。
【0023】
複合電流2層モータ4は、内側ロータ4riと、これを包囲する環状の外側ロータ4roとを、変速機ケース1内に同軸に回転自在に支持して具え、これら内側ロータ4riおよび外側ロータ4ro間における環状空間に同軸に配置した環状ステ−タ4sを変速機ケース1に固設して構成する。
環状コイル4sと外側ロータ4roとで外側のモータ/ジェネレータである第1のモータ/ジェネレータMG1を構成し、環状コイル4sと内側ロータ4riとで内側のモータ/ジェネレータである第2のモータ/ジェネレータMG2を構成する。
ここでモータ/ジェネレータMG1,MG2はそれぞれ、 複合電流をモータ側が負荷として供給される時は供給電流に応じた個々の方向の、また供給電流に応じた個々の速度(停止を含む)の回転を出力するモータとして機能し、複合電流を発電機側が負荷として印加した時は外力による回転に応じた電力を発生する発電機として機能する。
【0024】
ラビニョオ型プラネタリギヤセット2の上記した4個の回転メンバには、回転速度順に、つまり図2の共線図にも示したがサンギヤSs、リングギヤR、キャリアC、サンギヤSdの順に、第1モータ/ジェネレータMG1、原動機であるエンジンENG、ディファレンシャギヤ装置6を含む車輪駆動系への出力(Out)、第2モータ/ジェネレータMG2をそれぞれ結合する。
【0025】
この結合を図1に基づき以下に詳述するに、リングギヤRを上記の通りエンジン(ENG)回転が入力される入力要素とするため、このリングギヤRをクラッチ3を介してエンジンクランクシャフト9に結合する。
サンギヤSdは軸11を介して第2モータ/ジェネレータMG2の内側ロータ4riに結合し、軸11を包套する中空軸12を介してサンギヤSsを第1モータ/ジェネレータMG1の外側ロータ4roに結合する。
【0026】
キャリアCを前記のごとく、車輪駆動系(Out)へ回転を出力する出力要素とするため、このキャリアCに中空軸13を介して出力歯車14を結合し、これをカウンターシャフト5上のカウンター歯車15に噛合させる。
カウンターシャフト5には別にファイナルドライブピニオン16を一体的に設け、これを、ディファレンシャルギヤ装置6に設けたファイナルドライブリングギヤ17に噛合させる。
変速機からの出力回転は、ファイナルドライブピニオン16およびファイナルドライブリングギヤ17により構成されるファイナルドライブギヤ組を経てディファレンシャルギヤ装置6に至り、このディファレンシャルギヤ装置により左右駆動輪18に分配されるものとする。
【0027】
上記の構成になるハイブリッド変速機は図2に示すような共線図により表すことができ、この共線図の横軸は遊星歯車組7,8のギヤ比により決まる回転メンバ間の距離比、つまりリングギヤRおよびキャリアC間の距離を1とした時のサンギヤSsおよびリングギヤR間の距離の比をαで示し、キャリアCおよびサンギヤSd間の距離をβで示したものである。
また共線図の縦軸は、各回転メンバの回転速度、つまりリングギヤRへのエンジン回転数Ne、サンギヤSs(モータ/ジェネレータMG1)の回転数Nm1、キャリアCからの出力(Out)回転数No、およびサンギヤSd(モータ/ジェネレータMG2)の回転数Nm2を示し、2個の回転メンバの回転速度が決まれば他の2個の回転メンバの回転速度が決まる。
図2において回転バランス式は、(Nm1−No):(Ne−No)=(1+α):1および(Ne−Nm2):(Ne−No)=(1+β):1で表され、モータ/ジェネレータMG1,MG2の回転数Nm1,Nm2はそれぞれ、エンジン回転数Neおよび出力回転数Noから次式の回転バランス式により求めることができる。
Nm1=(1+α)Ne−α・No・・・(1)
Nm2=(1+β)No−β・Ne・・・(2)
【0028】
図2には更に、その縦軸方向のベクトルとして、各回転メンバに働くエンジントルクTe、モータ/ジェネレータMG1,MG2のトルクTm1,Tm2、および出力(Out)トルクToを示した。
ここで、リングギヤRに結合した入力回転系はエンジンENGが存在するためその回転イナーシャが大きく、またキャリアCに結合した出力(Out)回転系も車輪やディファレンシャルギヤ装置などが存在するためその回転イナーシャが大きいことから、共線図上におけるレバー重心Gは図2に示すごとく、イナーシャが大きなリングギヤR(エンジンENG)およびキャリアC(出力Out)間に位置し、この位置を以下ではサンギヤSsからの距離Xgcとして示す。
【0029】
定常状態を維持(車速一定で目標駆動トルクを実現)するためには、4個の回転メンバに働くトルクによる並進運動γおよび回転運動δが共に0であることである。
つまり並進運動γについては、Tm1+Te+Tm2=Toが成立し、また回転運動δについては、(α+1)Tm1+Te=βTm2が成立することである。
これら2式を解いて、図2の共線図におけるトルクバランス式は次式で表される。
Tm1=−{βTo−(1+β)Te}/(α+1+β)・・・(3)
Tm2=−{(1+α)To−α・Te}(α+1+β)・・・(4)
【0030】
なお図1ではモータ/ジェネレータMG1,MG2を複合電流2層モータとして構成したが、モータ/ジェネレータMG1,MG2はこれに限られず、個々のロータおよびステータ組で構成し、これらの組を相互に径方向へオフセットさせて配置することができる。
【0031】
上記したハイブリッド変速機の変速制御システムは図3に示すごとく、ハイブリッドコントローラ21を具え、このハイブリッドコントローラ21は目標エンジントルクtTeに関する指令をエンジンコントローラ22に供給し、エンジンコントローラ22はエンジンENGを当該目標トルクが発生するよう運転させる。
【0032】
ハイブリッドコントローラ21は更に、モータ/ジェネレータMG1のトルク指令tTm1’およびモータ/ジェネレータMG2の回転数指令tNm2’の組み合わせに関する信号、またはモータ/ジェネレータMG1の回転数指令tNm1’およびモータ/ジェネレータMG2のトルク指令tTm1’の組み合わせに関する信号をモータコントローラ23に供給し、モータコントローラ23はインバータ24およびバッテリ25によりモータ/ジェネレータMG1,MG2をそれぞれ、上記したトルク指令および回転数指令の組み合わせが達成されるよう制御する。
【0033】
これがためハイブリッドコントローラ21には、アクセルペダル踏み込み量からアクセル開度APOを検出するアクセル開度センサ26からの信号と、車速VSPを検出する車速センサ27からの信号と、モータ/ジェネレータMG1,MG2の実トルクTm1,Tm2を検出するトルク検出手段28,29からの信号と、モータ/ジェネレータMG1,MG2の実回転数Nm1,Nm2を検出する回転検出手段30,31からの信号と、エンジン回転数Neを検出するエンジン回転センサ32からの信号とを入力する。
なお、モータ/ジェネレータMG1,MG2のトルク検出手段28,29および回転検出手段30,31からの信号は更にモータコントローラ23にも供給し、モータコントローラ23がこれら検出手段からの信号と上記したトルク指令および回転数指令との間における偏差に応じたフィードバック制御により当該指令が達成されるようになす。
ハイブリッドコントローラ21は上記の入力情報を基に、図4にブロック線図で示す処理を行ってハイブリッド変速機の制御を以下のごとくに行う。
【0034】
図4における目標駆動トルク演算部41は、アクセル開度APOおよび車速VSPから運転者要求している車輪の目標駆動トルクtTdを周知のマップ検索などの手法により求める。
目標エンジン(原動機)出力演算部42は、車速VSPに車輪タイヤ半径などで決まる定数Krを掛けて車輪駆動軸回転数Ndを求め、乗算器42aで車輪駆動軸回転数Ndと上記目標駆動トルクtTdとの乗算により車輪の目標駆動力tPvを算出し、これにモータ/ジェネレータMG1,MG2の損失分を加算して目標エンジン出力tPeを求める。
なお、目標エンジン出力tPeの算出に当たっては、モータ/ジェネレータMG1,MG2の損失分に加えて、必要に応じラビニョオ型プラネタリギヤセット2の伝動ロス分をも加算することができる。
【0035】
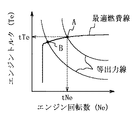
エンジン(原動機)動作点決定部43は、目標エンジン(原動機)出力tPeを発生させるための目標エンジン(原動機)トルクtTeおよび目標エンジン(原動機)回転数tNeの組み合わせとしてエンジン動作点(tTe,tNe)を決定する。
かかるエンジン動作点の決定に際し好ましくは、図5に例示するエンジン性能線図を基に目標エンジン出力tPeを最低燃費で発生させるエンジントルクTeおよびエンジン回転数Neの組み合わせをエンジン動作点(tTe,tNe)とする最適燃費制御を用いるのが良い。
【0036】
図5は、エンジン出力ごとにこれを発生するエンジントルクTeおよびエンジン回転数Neの組み合わせを等馬力線として示し、各等馬力線上にあって対応するエンジン出力を最低燃費で発生させるエンジントルクTeおよびエンジン回転数Neの組み合わせをA,B点により示し、各等馬力線上の最低燃費点A,Bを結ぶ線を最適燃費線として示す。
図5を基に最適燃費制御によりエンジン動作点(tTe,tNe)を求めるに際しては、目標エンジン出力tPeに対応する等馬力線と最適燃費線との交点を例えばA点のように決定し、当該点に対応するエンジントルクTeおよびエンジン回転数Neの組み合わせをエンジン動作点(tTe,tNe)と定める。
【0037】
第1モータ/ジェネレータ目標トルク演算部44は、目標駆動トルクtTdをファイナルギヤ比Gfで除算して求め得る変速機目標出力トルクtTo、および上記の目標エンジントルクtTeから、第1モータ/ジェネレータMG1の目標トルクtTm1を、前記(3)式に対応する次のトルクバランス式
tTm1={β・tTo−(1+β)tTe}/(α+1+β)・・・(5)
の演算により求める。
また第2モータ/ジェネレータ目標トルク演算部45は、同じく変速機目標出力トルクtToおよび目標エンジントルクtTeから、第2モータ/ジェネレータMG2の目標トルクtTm2を、前記(4)式に対応する次のトルクバランス式
tTm2={(1+α)tTo−α・tTe}/(α+1+β)・・・(6)
の演算により求める。
【0038】
第2モータ/ジェネレータ目標回転数演算部46は、車輪駆動軸回転数Ndにファイナルギヤ比Gfを掛けて求め得る変速機出力回転数No、および前記目標エンジン回転数tNeから、第2モータ/ジェネレータMG2の目標回転数tNm2を、前記(2)式に対応する次の回転バランス式
tNm2=(1+β)No−β・tNe・・・(7)
の演算により求める。
第1モータ/ジェネレータ目標回転数演算部47は、同じく変速機出力回転数Noおよび目標エンジン回転数tNeから、第1モータ/ジェネレータMG1の目標回転数tNm1を、前記(1)式に対応する次の回転バランス式
tNm1=(1+α)tNe−α・No・・・(8)
の演算により求める。
【0039】
モータ/ジェネレータ制御指令演算部48は、図6に示す処理により、モータ/ジェネレータMG1,MG2の何れをトルク制御して、何れを回転数制御すべきかを決定し、その結果に応じ、
モータ/ジェネレータMG1をトルク制御して、モータ/ジェネレータMG2を回転数制御すべきなら、後述するごとくに演算するモータ/ジェネレータMG1のトルク指令tTm1’およびモータ/ジェネレータMG2の回転数指令tNm2’の組み合わせに関する信号を図3のモータコントローラ23に供給し、
モータ/ジェネレータMG1を回転数制御して、モータ/ジェネレータMG2をトルク制御すべきなら、後述するごとくに演算するモータ/ジェネレータMG1の回転数指令tNm1’およびモータ/ジェネレータMG2のトルク指令tTm1’の組み合わせに関する信号を図3のモータコントローラ23に供給する。
【0040】
図6のステップS1においては、モータ/ジェネレータMG1をトルク制御して、モータ/ジェネレータMG2を回転数制御するよう、トルク指令tTm1’に第1モータ/ジェネレータMG1の目標トルクtTm1をセットすると共に回転数指令tNm2’に第2モータ/ジェネレータMG2の目標回転数tNm2をセットして、第1モータ/ジェネレータMG1のトルク指令tTm1’および第2モータ/ジェネレータMG2の回転数指令tNm2’に関する組み合わせを図3のモータコントローラ23に供給する。
【0041】
次のステップS2では、上記のようにして回転数制御されているモータ/ジェネレータMG2のトルクTm2が上下限値間の値から外れた飽和状態になったか否かを判定し、飽和状態でなければ前記した予期せぬ変速の問題を生じないから、ステップS1でのモータ/ジェネレータMG1,MG2の制御を継続して、引き続きダイレクト配電を行う。
ステップS2でモータ/ジェネレータMG2のトルクTm2が飽和していると判定する場合は、ステップS3〜ステップS5において、モータ/ジェネレータMG1をトルク制御から回転数制御に切り替えると共にモータ/ジェネレータMG2を回転数制御からトルク制御に切り替える。
【0042】
モータ/ジェネレータMG1をトルク制御から回転数制御に切り替えるに当たっては、先ずステップS3で、モータ/ジェネレータMG1の回転数Nm1を回転数指令tNm1’の初期値としてモータ/ジェネレータMG1の回転数制御を開始させ、ステップS4で、モータ/ジェネレータMG1の回転数が当該初期値から滑らかに目標回転数tNm1になるような回転数指令tNm1’を演算して図3のモータコントローラ23に供給する。
モータ/ジェネレータMG2を回転数制御からトルク制御に切り替えるに当たっては、先ずステップS3で、モータ/ジェネレータMG2のトルクTm2をトルク指令tTm2’の初期値としてモータ/ジェネレータMG2のトルク制御を開始させ、ステップS4で、モータ/ジェネレータMG2のトルクが当該初期値から滑らかに目標トルクtTm2になるようなトルク指令tTm2’を演算して図3のモータコントローラ23に供給する。
【0043】
かかるランプ制御により、モータ/ジェネレータMG1の回転数指令tNm1’が目標回転数tNm1になり、且つ、モータ/ジェネレータMG2のトルク指令tTm2’が目標トルクtTm2になった後は、ステップS5において、モータ/ジェネレータMG1を回転数制御して、モータ/ジェネレータMG2をトルク制御するため、回転数指令tNm1’に第1モータ/ジェネレータMG1の目標回転数tNm1をセットすると共にトルク指令tTm2’に第2モータ/ジェネレータMG2の目標トルクtTm2をセットして、第1モータ/ジェネレータMG1の回転数指令tNm1’および第2モータ/ジェネレータMG2のトルク指令tTm2’に関する組み合わせを図3のモータコントローラ23に供給する。
【0044】
ステップS6では、上記のように回転数制御されているモータ/ジェネレータMG1のトルクTm1が上下限値間の値から外れた飽和状態になったか否かを判定し、飽和状態でなければ前記した予期せぬ変速の問題を生じないから、ステップS5でのモータ/ジェネレータMG1,MG2の制御を継続して、引き続きダイレクト配電を行う。
ステップS6でモータ/ジェネレータMG1のトルクTm1が飽和していると判定する場合は、ステップS7、ステップS5およびステップS1において、モータ/ジェネレータMG1を回転数制御からトルク制御に切り替えて戻すと共にモータ/ジェネレータMG2をトルク制御から回転数制御に切り替えて戻す。
【0045】
モータ/ジェネレータMG1を回転数制御からトルク制御に切り替えるに当たっては、先ずステップS7で、モータ/ジェネレータMG1のトルクTm1をトルク指令tTm1’の初期値としてモータ/ジェネレータMG1のトルク制御を開始させ、ステップS8で、モータ/ジェネレータMG1のトルクが当該初期値から滑らかに目標トルクtTm1になるようなトルク指令tTm1’を演算して図3のモータコントローラ23に供給する。
モータ/ジェネレータMG2をトルク制御から回転数制御に切り替えるに当たっては、先ずステップS7で、モータ/ジェネレータMG2の回転数Nm2を回転数指令tNm2’の初期値としてモータ/ジェネレータMG2の回転数制御を開始させ、ステップS8で、モータ/ジェネレータMG2の回転数が当該初期値から滑らかに目標回転数tNm2になるような回転数指令tNm2’を演算して図3のモータコントローラ23に供給する。
【0046】
かかるランプ制御により、モータ/ジェネレータMG1のトルク指令tTm1’が目標回転数tTm1になり、且つ、モータ/ジェネレータMG2の回転数指令tNm2’が目標回転数tNm2になった後は、ステップS1において、モータ/ジェネレータMG1をトルク制御して、モータ/ジェネレータMG2を回転数制御するため、トルク指令tTm1’に第1モータ/ジェネレータMG1の目標トルクtTm1をセットすると共に回転数指令tNm2’に第2モータ/ジェネレータMG2の目標回転数tNm2をセットして、第1モータ/ジェネレータMG1のトルク指令tTm1’および第2モータ/ジェネレータMG2の回転数指令tNm2’に関する組み合わせを図3のモータコントローラ23に供給する。
【0047】
以上のように、回転数制御しているモータ/ジェネレータのトルクが飽和した時(ステップS2、ステップS6)、該当するモータ/ジェネレータを回転数制御からトルク制御に切り替えて出力制御に供し、同時に他方のモータ/ジェネレータをトルク制御から回転数制御に切り替えて変速制御に供する場合、以下のような作用効果が奏し得られる。
図8につき前述したごとくモータ/ジェネレータMG1をトルク制御し、モータ/ジェネレータMG2を回転数制御している間にエンジンENGの実トルクが外乱などによりトルク指令よりdTeだけ誤差を持ったことで、回転数制御されているモータ/ジェネレータMG2のトルクTm2がdTm2だけ増加して限界値を越えた飽和状態になった場合につき、上記モータ/ジェネレータMG1,MG2間での制御モードの切り替えによる作用効果を図9により説明する。
【0048】
このとき制御モードの切り換えをせず、相変わらずモータ/ジェネレータMG1をトルク制御し、モータ/ジェネレータMG2を回転数制御する場合、前記したように図8に実線で示すレバー状態から二点鎖線で示すレバー状態への予期せぬ変速を行ってしまい、また、出力トルクToもdToだけ増大して所望のものとは異なってしまうが、
図6につき前述した制御によれば、回転数制御しているモータ/ジェネレータMG2のトルクTm2が飽和する時(ステップS2)、このモータ/ジェネレータMG2を回転数制御からトルク制御に切り替えると共に他方のモータ/ジェネレータMG1をトルク制御から回転数制御に切り替えるため(ステップS3〜ステップS5)、トルクバランスは図8の状態から図9の状態に変化する。
つまり、エンジントルクの外乱などによる予期せぬ増大dTeが、モータ/ジェネレータMG1のトルク変動dTm1={1/(1+α)}dTeと、出力トルクToの変動dTo={α/(1+α)}dTeとによって吸収される。この場合モータ/ジェネレータMG1が回転数制御を健全に続行できるので、レバー状態は図8の実線状態を移記した図9の実線状態に保たれ、エンジントルクの外乱などによる予期せぬ増大dTeによっても予期せぬ変速を生ずることがないし、出力トルクToの変化を生ずることもなく、前記した従来の問題を解消することができる。
【0049】
しかも本実施の形態においては、回転数制御からトルク制御に切り替えられるモータ/ジェネレータのトルク指令tTm2’(tTm1’)を、切り替え直前における当該モータ/ジェネレータの実トルクTm2(Tm1)から目標トルクtTm2(tTm1)に漸近させ(ステップS3,S4、ステップS7,S8)、トルク制御から回転数制御に切り替えられるモータ/ジェネレータの回転数指令tNm1’(tNm2’)を、切り替え直前における当該モータ/ジェネレータの実回転数Nm1(Nm2)から目標回転数tNm1(tNm2)に漸近させる(ステップS3,S4、ステップS7,S8)ため、
モータ/ジェネレータMG1,MG2が制御モード切り換えする時にトルクや回転数の急変を生ずることがなく、ショックの発生を回避することができる。
【0050】
図7は、本発明の他の実施の形態を示す、図6に対応したモータ/ジェネレータ制御指令演算処理のためのフローチャートである。
図6においては、回転数制御しているモータ/ジェネレータのトルクが飽和した時、該当するモータ/ジェネレータを回転数制御からトルク制御に切り替えると同時に他方のモータ/ジェネレータをトルク制御から回転数制御に切り替えることとしたが、図7に示す本実施の形態おいては、トルク制御しているモータ/ジェネレータの回転数が飽和した時、該当するモータ/ジェネレータをトルク制御から回転数制御に切り替えると同時に他方のモータ/ジェネレータを回転数制御からトルク制御に切り替える。
【0051】
これがため図7においては、図6におけるステップS2をステップS12に置換し、ステップS6をステップS16に置換するが、これら以外のステップは全て図6の対応するステップ(同符号にて示す)と同様の処理を行うものとする。ステップS12においては、ステップS1でトルク制御されているモータ/ジェネレータMG1の回転数Nm1が、上下限値間の範囲を逸脱した飽和状態か否かをチェックし、飽和していなければ、ステップS1におけるモータ/ジェネレータMG1のトルク制御およびモータ/ジェネレータMG2の回転数制御を継続させ、飽和していればステップS3〜ステップS5で、モータ/ジェネレータMG1をトルク制御から回転数制御に切り替え、モータ/ジェネレータMG2を回転数制御からトルク制御に切り替える。
【0052】
ステップS16においては、上記制御モードの切り換えでトルク制御されているモータ/ジェネレータMG2の回転数Nm2が、上下限値間の範囲を逸脱した飽和状態か否かをチェックし、飽和していなければ、ステップS5におけるモータ/ジェネレータMG1の回転数制御およびモータ/ジェネレータMG2のトルク制御を継続させ、飽和していればステップS7、ステップS8およびステップS1で、モータ/ジェネレータMG2をトルク制御から回転数制御に切り替え、モータ/ジェネレータMG1を回転数制御からトルク制御に切り替える。
【0053】
本実施の形態によれば上記のごとく、トルク制御中に回転数が飽和したモータ/ジェネレータをトルク制御から回転数制御に切り替えて変速制御に供するから回転数の飽和を解消することができる。
同時に、回転数制御中のモータ/ジェネレータは出力制御用にトルク制御に切り替えるが、このモータ/ジェネレータは回転数の飽和に対して余裕があるから回転数の飽和を生ずることはない。
よって何れのモータ/ジェネレータも回転数の飽和を生ずることがなく、当該回転数の飽和によってもトルクの飽和時と同様な予期せぬ変速を生ずるところながら、かかる問題を解消することができる。
【図面の簡単な説明】
【図1】本発明による制御装置を適用し得るハイブリッド変速機を例示する線図的構成図である。
【図2】同ハイブリッド変速機の回転バランス式およびトルクバランス式を求めるのに用いた共線図である。
【図3】同ハイブリッド変速機の制御システムを示すブロック線図である。
【図4】同制御システムにおけるハイブリッドコントローラが実行する変速制御の機能別ブロック線図である。
【図5】エンジンの最適燃費線を等出力線とともに例示するエンジンの性能線図である。
【図6】図4におけるモータ/ジェネレータ制御指令演算部が実行する制御プログラムのフローチャートである。
【図7】本発明の他の実施の形態を示す、図6と同様なフローチャートである。
【図8】エンジントルクの予期せぬ増大に伴うハイブリッド変速機の予期せぬ変速の発生状況を示す共線図である。
【図9】同予期せぬ変速を、図6に示す処理によれば防止し得ることを説明するのに用いた共線図である。
【符号の説明】
1 変速機ケース
2 ラビニョオ型プラネタリギヤセット(差動装置)
3 クラッチ
ENG エンジン(原動機)
4 複合電流2層モータ
MG1 第1モータ/ジェネレータ
MG2 第2モータ/ジェネレータ
7 シングルピニオン遊星歯車組
8 ダブルピニオン遊星歯車組
Sd サンギヤ
Ss サンギヤ
P1 ロングピニオン
P2 ショートピニオン
R リングギヤ
C キャリア
21 ハイブリッドコントローラ
22 エンジンコントローラ
23 モータコントローラ
24 インバータ
25 バッテリ
26 アクセル開度センサ
27 車速センサ
28 第1モータ/ジェネレータのトルク検出手段
29 第2モータ/ジェネレータのトルク検出手段
30 第1モータ/ジェネレータの回転検出手段
31 第2モータ/ジェネレータの回転検出手段
32 エンジン回転センサ
41 目標駆動トルク演算部
42 目標エンジン出力演算部
43 エンジン動作点決定部
44 第1モータ/ジェネレータ目標トルク演算部
45 第2モータ/ジェネレータ目標トルク演算部
46 第2モータ/ジェネレータ目標回転数演算部
47 第1モータ/ジェネレータ目標回転数演算部
48 モータ/ジェネレータ制御指令演算部
Claims (4)
- 共線図上に配置される回転メンバとして4個の回転メンバを有し、これら回転メンバのうち2個のメンバの回転状態を決定すると他のメンバの回転状態が決まる2自由度の差動装置を具え、前記回転メンバのうち、共線図上の内側に位置する2個の回転メンバにそれぞれ原動機からの入力、および駆動系への出力を結合し、共線図上の外側に位置する2個の回転メンバにそれぞれ2個のモータ/ジェネレータを結合し、これらモータ/ジェネレータのうち、一方のモータ/ジェネレータの回転数制御により無段変速を行い、他方のモータ/ジェネレータのトルク制御により出力制御を行うようにしたハイブリッド変速機において、
前記回転数制御されている一方のモータ/ジェネレータのトルクがトルク限界を超えて飽和するとき、該一方のモータ/ジェネレータをトルク制御に切り替え、前記トルク制御されていた他方のモータ/ジェネレータを回転数制御に切り替えるよう構成したことを特徴とするハイブリッド変速機の制御装置。 - 請求項1に記載のハイブリッド変速機の制御装置において、回転数制御からトルク制御に切り替えられる前記一方のモータ/ジェネレータのトルク指令値を、切り替え直前における該一方のモータ/ジェネレータの実トルクから目標トルクに漸近させ、トルク制御から回転数制御に切り替えられる前記他方のモータ/ジェネレータの回転数指令値を、切り替え直前における該他方のモータ/ジェネレータの実回転数から目標回転数に漸近させるよう構成したことを特徴とするハイブリッド変速機の制御装置。
- 共線図上に配置される回転メンバとして4個の回転メンバを有し、これら回転メンバのうち2個のメンバの回転状態を決定すると他のメンバの回転状態が決まる2自由度の差動装置を具え、前記回転メンバのうち、共線図上の内側に位置する2個の回転メンバにそれぞれ原動機からの入力、および駆動系への出力を結合し、共線図上の外側に位置する2個の回転メンバにそれぞれ2個のモータ/ジェネレータを結合し、これらモータ/ジェネレータのうち、一方のモータ/ジェネレータの回転数制御により無段変速を行い、他方のモータ/ジェネレータのトルク制御により出力制御を行うようにしたハイブリッド変速機において、
前記トルク制御されている他方のモータ/ジェネレータの回転数が回転数限界を超えて飽和するとき、該他方のモータ/ジェネレータを回転数制御に切り替え、前記回転数制御されていた一方のモータ/ジェネレータをトルク制御に切り替えるよう構成したことを特徴とするハイブリッド変速機の制御装置。 - 請求項3に記載のハイブリッド変速機の制御装置において、トルク制御から回転数制御に切り替えられる前記他方のモータ/ジェネレータの回転数指令値を、切り替え直前における該他方のモータ/ジェネレータの実回転数から目標回転数に漸近させ、回転数制御からトルク制御に切り替えられる前記一方のモータ/ジェネレータのトルク指令値を、切り替え直前における該一方のモータ/ジェネレータの実トルクから目標トルクに漸近させるよう構成したことを特徴とするハイブリッド変速機の制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002342572A JP3586697B2 (ja) | 2002-11-26 | 2002-11-26 | ハイブリッド変速機の制御装置 |
| US10/717,894 US6971968B2 (en) | 2002-11-26 | 2003-11-21 | Hybrid transmission control system |
| DE60302127T DE60302127T2 (de) | 2002-11-26 | 2003-11-25 | Steuersystem für einen Hybridantrieb |
| EP03026968A EP1426222B1 (en) | 2002-11-26 | 2003-11-25 | Hybrid transmission control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002342572A JP3586697B2 (ja) | 2002-11-26 | 2002-11-26 | ハイブリッド変速機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004176790A true JP2004176790A (ja) | 2004-06-24 |
| JP3586697B2 JP3586697B2 (ja) | 2004-11-10 |
Family
ID=32310640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002342572A Expired - Fee Related JP3586697B2 (ja) | 2002-11-26 | 2002-11-26 | ハイブリッド変速機の制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6971968B2 (ja) |
| EP (1) | EP1426222B1 (ja) |
| JP (1) | JP3586697B2 (ja) |
| DE (1) | DE60302127T2 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7086977B2 (en) * | 2001-05-03 | 2006-08-08 | Ford Global Technologies, Llc | Transmission arrangements for hybrid electric vehicles |
| US7822524B2 (en) * | 2003-12-26 | 2010-10-26 | Toyota Jidosha Kabushiki Kaisha | Vehicular drive system |
| EP1619063B1 (en) * | 2004-07-21 | 2009-10-14 | Nissan Motor Company, Limited | Motor torque control apparatus and method for automotive vehicle |
| JP4239923B2 (ja) * | 2004-08-02 | 2009-03-18 | 日産自動車株式会社 | 電動力伝達装置 |
| JP4179266B2 (ja) * | 2004-11-08 | 2008-11-12 | 日産自動車株式会社 | ハイブリッド4輪駆動システム |
| US20070199744A1 (en) * | 2006-02-28 | 2007-08-30 | Leman Scott A | Power generating and storage system having a common stator |
| WO2007104161A1 (en) * | 2006-03-15 | 2007-09-20 | Tm4 Inc. | Hybrid transmission for hybrid vehicles |
| ITMI20061157A1 (it) * | 2006-06-15 | 2007-12-16 | Piaggio & C Spa | Metodo di gestione delle modalita' di funzionamento di un gruppo motopropulsore ibrido impiegante lo stesso |
| US7686723B2 (en) * | 2006-08-15 | 2010-03-30 | Ford Global Technologies, Llc | Hybrid electric vehicle and powertrain |
| JP4447613B2 (ja) * | 2007-02-08 | 2010-04-07 | トヨタ自動車株式会社 | ハイブリッド車両の駆動力制御装置 |
| US8150584B2 (en) * | 2009-05-12 | 2012-04-03 | Deere & Company | Generation and starting system |
| US8479851B2 (en) * | 2009-10-27 | 2013-07-09 | Magna Powertrain Of America, Inc. | Electric drive unit with modular motor assembly |
| US8538641B2 (en) * | 2009-12-28 | 2013-09-17 | Tai-Her Yang | Multi-motor drive system with differential speed regulated by CVT |
| JP5287780B2 (ja) * | 2010-03-30 | 2013-09-11 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| DE102010061479B4 (de) * | 2010-12-22 | 2025-12-31 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Antriebsverfahren und Antriebsvorrichtung für ein Hybridfahrzeug |
| CN102556045B (zh) * | 2010-12-31 | 2015-04-15 | 上海汽车集团股份有限公司 | 一种混合动力车辆断油滑行换挡控制方法 |
| JP5705585B2 (ja) * | 2011-02-25 | 2015-04-22 | Ntn株式会社 | 電気自動車 |
| JP5532339B2 (ja) * | 2011-03-09 | 2014-06-25 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| US9154067B2 (en) * | 2013-12-19 | 2015-10-06 | Kohler Co. | Torque sharing on paralleled generators |
| JP6745661B2 (ja) * | 2015-09-09 | 2020-08-26 | 山洋電気株式会社 | モータ制御装置 |
| DE102016203551B4 (de) | 2016-03-03 | 2019-06-06 | Audi Ag | Differentialgetriebe für ein Kraftfahrzeug |
| CN110023160B (zh) | 2016-12-01 | 2023-02-21 | 康明斯有限公司 | 用于控制混合动力发动机系统的系统和方法 |
| CN110949111B (zh) * | 2018-09-27 | 2023-10-20 | 西安交通大学 | 双转子电机与拉维娜式行星轮系串联式汽车混合动力系统 |
| DE102019100324A1 (de) * | 2019-01-08 | 2020-07-09 | Bayerische Motoren Werke Aktiengesellschaft | Vorrichtung zur Kalibrierung zweier auf einer Achse angeordneter Elektromotoren in zweiachsigen Kraftfahrzeugen |
| DE102019123367A1 (de) * | 2019-08-30 | 2021-03-04 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Antriebsstrang für ein Fahrzeug |
| US11884161B2 (en) * | 2021-05-07 | 2024-01-30 | Dana Heavy Vehicle Systems Group, Llc | Drivetrain with infinitely and electrically variable transmission capabilities |
| US11420613B1 (en) * | 2021-05-07 | 2022-08-23 | Dana Heavy Vehicle Systems Group, Llc | Drivetrain with infinitely and electrically variable transmission capabilities |
| CN115782852B (zh) * | 2022-12-29 | 2026-03-10 | 常州易控汽车电子股份有限公司 | 排气制动控制方法、系统、计算设备、存储介质及车辆 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3262046B2 (ja) * | 1997-09-17 | 2002-03-04 | トヨタ自動車株式会社 | ギヤ機構における歯打ち音の低減方法、動力出力装置およびこの動力出力装置を搭載したハイブリッド車輌 |
| CA2259771C (en) | 1998-02-19 | 2003-04-01 | Hitachi, Ltd. | Transmission, and vehicle and bicycle using the same |
| JP3498593B2 (ja) | 1998-10-15 | 2004-02-16 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP3395708B2 (ja) * | 1999-04-27 | 2003-04-14 | 株式会社日立製作所 | ハイブリッド車両 |
| WO2003035421A1 (en) * | 2001-10-22 | 2003-05-01 | The Timken Company | Electro-mechanical infinitely variable transmission |
-
2002
- 2002-11-26 JP JP2002342572A patent/JP3586697B2/ja not_active Expired - Fee Related
-
2003
- 2003-11-21 US US10/717,894 patent/US6971968B2/en not_active Expired - Lifetime
- 2003-11-25 DE DE60302127T patent/DE60302127T2/de not_active Expired - Lifetime
- 2003-11-25 EP EP03026968A patent/EP1426222B1/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6971968B2 (en) | 2005-12-06 |
| DE60302127D1 (de) | 2005-12-08 |
| JP3586697B2 (ja) | 2004-11-10 |
| EP1426222B1 (en) | 2005-11-02 |
| DE60302127T2 (de) | 2006-05-24 |
| EP1426222A1 (en) | 2004-06-09 |
| US20040149501A1 (en) | 2004-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3586697B2 (ja) | ハイブリッド変速機の制御装置 | |
| JP3823949B2 (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP3641244B2 (ja) | ハイブリッド変速機の変速制御装置 | |
| JP3614409B2 (ja) | ハイブリッド変速機 | |
| JP4015923B2 (ja) | ハイブリッドシステムのフェイル対応制御装置 | |
| JP3641245B2 (ja) | ハイブリッド変速機の変速制御装置 | |
| JP4239923B2 (ja) | 電動力伝達装置 | |
| JP2005048805A (ja) | ハイブリッド変速機のモード切り替え制御装置 | |
| JP2005145150A (ja) | ハイブリッド変速機の変速制御装置 | |
| JP2004248410A (ja) | ハイブリッド車両の制御装置 | |
| JP3991875B2 (ja) | ハイブリッド変速機 | |
| JP4114643B2 (ja) | 車両用駆動装置の制御装置 | |
| JP3938001B2 (ja) | ハイブリッド変速機の異常時制御方法 | |
| JP4086014B2 (ja) | 動力出力装置および自動車並びに動力出力装置の制御方法 | |
| JP2004015982A (ja) | ハイブリッド変速機の変速制御装置 | |
| JP2005016570A (ja) | ハイブリッド車のモード遷移制御装置 | |
| JP3929382B2 (ja) | ハイブリッド変速機の変速制御装置 | |
| JP2004330924A (ja) | ハイブリッド車の運転モード遷移制御装置 | |
| JP4277841B2 (ja) | 車両および走行用パワーの表示方法 | |
| JP4462219B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2004132421A (ja) | ハイブリッド変速機の制御方法 | |
| JP2004270785A (ja) | ハイブリッド変速機の変速制御装置 | |
| JP2004066840A (ja) | ハイブリッド変速機の変速制御装置 | |
| JP3885756B2 (ja) | ハイブリッド変速機の変速制御装置 | |
| JP2008149966A (ja) | 動力出力装置、これを備えたハイブリッド自動車、および動力出力装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040707 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20040707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040712 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20040712 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080820 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080820 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090820 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090820 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100820 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110820 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110820 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120820 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120820 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130820 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |