JP2004268153A - 産業用ロボット - Google Patents
産業用ロボット Download PDFInfo
- Publication number
- JP2004268153A JP2004268153A JP2003058395A JP2003058395A JP2004268153A JP 2004268153 A JP2004268153 A JP 2004268153A JP 2003058395 A JP2003058395 A JP 2003058395A JP 2003058395 A JP2003058395 A JP 2003058395A JP 2004268153 A JP2004268153 A JP 2004268153A
- Authority
- JP
- Japan
- Prior art keywords
- work
- industrial robot
- shielding member
- supply means
- holding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 239000000463 material Substances 0.000 claims abstract description 47
- 239000000843 powder Substances 0.000 claims description 4
- 230000003749 cleanliness Effects 0.000 abstract description 3
- 230000007246 mechanism Effects 0.000 description 18
- 239000011248 coating agent Substances 0.000 description 8
- 238000000576 coating method Methods 0.000 description 8
- 239000000428 dust Substances 0.000 description 5
- 239000000853 adhesive Substances 0.000 description 4
- 230000001070 adhesive effect Effects 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- 230000007723 transport mechanism Effects 0.000 description 4
- 230000003028 elevating effect Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000007664 blowing Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 239000000049 pigment Substances 0.000 description 2
- 238000010926 purge Methods 0.000 description 2
- 239000012780 transparent material Substances 0.000 description 2
- 239000004925 Acrylic resin Substances 0.000 description 1
- 229920000178 Acrylic resin Polymers 0.000 description 1
- 229910001111 Fine metal Inorganic materials 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- -1 for example Substances 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images











Landscapes
- Manipulator (AREA)
Abstract
【解決手段】ワーク2に対し組立や加工等を行う産業用ロボット1において、産業用ロボット1を覆い外部と遮蔽する遮蔽部材3と、ワーク2を保持して移動させる保持移動手段4と、ワーク2に材料を供給する供給手段5と、供給手段5の供給口6を遮蔽部材3の内側にして供給手段5を遮蔽部材3に貫通させて支持する取り付け部7とを備える。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、産業用ロボットに関する。さらに詳述すると、本発明は、クリーン組立モジュール装置などにおいてワークの組立、加工、搬送等の作業を行う産業用ロボットに関する。
【0002】
【従来の技術】
接着剤などの材料を塗布する工程を自動化するため、図12に示すように材料を封入したシリンジ100を3自由度以上のロボット機構101で支持するロボットディスペンサが使用されている。この種のロボットディスペンサでは、塗布対象であるワーク102を固定した状態でシリンジ100をロボット機構101により移動させながら塗布を行う。ロボット機構101は、前後方向移動機構103と左右方向移動機構104と昇降機構105とを備えている。
【0003】
また、図13に示すようにワーク102を1軸動作させると共にシリンジ100を他の2軸動作させるロボットディスペンサも使用されている。このような産業用ロボットでは、シリンジ100内に材料を供給する際には本体に装着された空になったシリンジを材料が充填されたシリンジ100に交換することにより行っている。
【0004】
これらの産業用ロボットは、クリーン環境下において作業を行うクリーン組立モジュール装置(例えば外壁となる遮蔽壁によって覆われさらにシールが施されることによって装置外部と遮蔽され、フィルタを通したクリーンエアを送風して装置内部とくに作業領域の雰囲気をクリーンに保ちクリーン環境下でワークの組立等の作業を行うようにした装置)において利用される場合がある。この場合、シリンジ100及びロボット機構101の全体がクリーン環境下に設置されている。
【0005】
【特許文献1】
特開平5−92161号公報
【0006】
【発明が解決しようとする課題】
しかしながら、上述した産業用ロボットではシリンジ100の全体がクリーン環境下に設置されているので、シリンジ100の交換をクリーン空間内で行わなければならず、作業者によりクリーン空間内に塵埃が撒き散らされてクリーン度が低下してしまう。特に産業用ロボットのみをクリーン環境下に設置する局所クリーンを実施する場合は、交換用シリンジ100は非クリーン空間を輸送されて来ることになり、シリンジ100の外壁に付着している塵埃によりクリーン度が低下してしまう。
【0007】
これを防止するために、図14に示すように3自由度のロボット機構101により支持したシリンジ100を非クリーン空間中に設置した産業用ロボットが開発されている。この産業用ロボットは、シリンジ100の水平移動範囲の遮蔽部材106に形成された透孔107と、シリンジ100を外周から保持する保持筒108と、保持筒108に密着すると共に透孔107を塞ぎながらシリンジ100の水平移動に伴って移動するカバー109と、このカバー109に取り付けられると共に保持筒108の外周側に隙間を有して設けられたカバー筒110と、保持筒108の周囲に取り付けられる環状突起111とを備えている。また、図14中、符号112は清浄空気流、113は局所クリーン領域、114は高圧クリーン領域を各々示す。この産業用ロボットではシリンジ100と遮蔽部材106との間に若干の隙間があるため、シリンジ100の移動に伴って局所クリーン領域113と高圧クリーン領域114の差圧によるパージを行っている。
【0008】
しかしながら、図14に示す産業用ロボットではシリンジ100が3自由度で移動するので、遮蔽部材106とカバー109との構造およびパージによる制御が複雑になってしまい、小型化や低コスト化が困難であった。
【0009】
そこで、本発明は、簡易な構造で高いクリーン度を維持できる産業用ロボットを提供することを目的とする。
【0010】
【課題を解決するための手段】
かかる目的を達成するため、請求項1記載の発明は、ワークに対し組立や加工等を行う産業用ロボットにおいて、産業用ロボットを覆い外部と遮蔽する遮蔽部材と、ワークを保持して移動させる保持移動手段と、ワークに材料を供給する供給手段と、供給手段の供給口を遮蔽部材の内側にして供給手段を遮蔽部材に貫通させて支持する取り付け部とを備えるようにしている。
【0011】
したがって、供給手段は遮蔽部材の内部に供給口だけを出しているので、供給手段の交換時に作業者や供給手段の外面の塵埃が遮蔽部材の内側に入ってしまうことを抑制できる。また、供給手段は遮蔽部材の取り付け部に固定されたまま移動しないので、複雑な遮蔽構造を取る必要がない。このため、構造の簡素化により装置の小型化と低コスト化を図ることができる。
【0012】
供給手段としては、請求項2記載のようにシリンジとしたり、あるいは請求項3記載のように微小粉体の供給装置にすることができる。
【0013】
そして、請求項4記載の発明は、請求項1から3までのいずれか記載の産業用ロボットにおいて供給手段は回転可能であるようにしている。したがって、直交座標系でワークを移動させて位置決めする従来のロボットに比べて容易に円運動を実現できる。
【0014】
また、請求項5記載の発明は、請求項1から4までのいずれか記載の産業用ロボットにおいて、供給手段の装着時に供給手段の一部を突き当てて位置決めする基準部を備えるようにしている。したがって、供給手段の位置決めを容易に行うことができると共に、位置決めせずに任意の位置に設置したときのように供給口の位置をロボットに記憶させるティーチング作業を行う必要が無い。
【0015】
【発明の実施の形態】
以下、本発明の構成を図面に示す実施の形態の一例に基づいて詳細に説明する。
【0016】
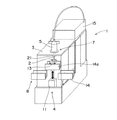
図1〜図4に本発明の一実施形態を示す。本発明の産業用ロボット1は、ワーク2に対し組立や加工等を行うものとしている。そして、この産業用ロボット1は、産業用ロボット1を覆い外部と遮蔽する遮蔽部材3と、ワーク2を保持して移動させる保持移動手段4と、ワーク2に材料を供給する供給手段5と、供給手段5の供給口6を遮蔽部材3の内側にして供給手段5を遮蔽部材3に貫通させて支持する取り付け部7とを備えるようにしている。このため、供給手段5は遮蔽部材3の内部に供給口6だけを出しているので、供給手段5の交換時に作業者や供給手段5の外面の塵埃が遮蔽部材3の内側に入ってしまうことを抑制できる。
【0017】
保持移動手段4としては例えば3自由度ロボットを使用している。すなわち、図1および図2に示すように、保持移動手段4は、ワーク2を遮蔽部材3の内外に搬送する搬送機構8と、ワーク2を前後に移動させる前後方向移動機構9と、ワーク2を左右に移動させる左右方向移動機構10と、ワーク2を昇降させる昇降機構11と、ワーク2を保持するエアチャック12とを備えている。搬送機構8は、ワーク2を載置して搬送するワークパレット13と、ワークパレット13を案内する搬送軌道14とを備えている。この保持移動手段4の構成は特に限られず、既知のあるいは新規の機構を使用することができる。また、本実施形態では保持移動手段4はワーク2よりも下方に配置されている。このため、遮蔽部材3の内部のクリーン度を確保し易い。
【0018】
遮蔽部材3は保持移動手段4を覆うように形成されている。そして、この産業用ロボット1には、この遮蔽部材3の内側空間に清浄エアを吹き込んでクリーン空間を形成する清浄エア供給手段15が設けられている。遮蔽部材3の内部には、ワーク2に加工などを行う作業領域とワーク2を移動させるための機構領域とを分離するグレーティング遮蔽壁(図示せず)が設けられている。
【0019】
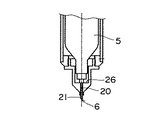
取り付け部7は、図2および図3に示すように遮蔽部材3の上部に形成された透孔16と、この透孔16に挿入された固定筒17と、固定筒17の上部に形成されたフランジ18と、フランジ18に固定された保持環19と、固定筒17の下部に形成されたノズル突出口20とを備えている。固定筒17は上端部とノズル突出口20のみ開口されていて、他の部分は閉塞されている。このため、供給手段5の交換時に遮蔽部材3の内部に外部の塵埃が入ることを極力抑えることができる。
【0020】
フランジ18は遮蔽部材3の透孔16の縁に取り付けられている。固定筒17に挿入された供給手段5は保持環19に摩擦によって固定される。これにより、供給手段5は任意の高さで固定することができる。また、固定筒17および供給手段5は透明な材質、例えばアクリル樹脂から成ることが好ましい。これによれば、外部から目視により材料の残量を確認することができる。
【0021】
供給手段5はワーク2に接着剤を供給するシリンジとしている。供給手段5は先端に長手方向に沿った直線状のノズル21を備えている。供給手段5はノズル21をノズル突出口20から突出させて取り付けられる。
【0022】
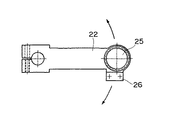
さらに、遮蔽部材3の内部には供給手段5のノズル21から垂れた材料の液を受ける材料受け皿22が設けられている。この材料受け皿22は、材料受け皿旋回機構23により支持軸24を中心に旋回可能に設けられている。材料受け皿22は、供給手段5が塗布作業を行っていない時に窪み部25をノズル21の下方に位置させて停止される。これにより、ノズル21から垂れた液が窪み部25に溜まり、保持移動手段4やワーク2を汚すことを防止できる。ここで、材料受け皿22あるいは材料受け皿旋回機構23には、重量計測機能を持たせることが好ましい。これによれば、供給手段5からの材料の流出を検知することができるので、供給手段5を設置した直後のエア抜きの終了や供給状態の確認を行うことができる。
【0023】
また、遮蔽部材3の内部には、供給手段5の設置時にノズル21の先端を突き当てて供給手段5の取り付け高さの位置決めを行う基準部26を備えている。本実施形態では、図3および図4に示すように、基準部26は材料受け皿22の一部に形成されている。このため、基準部26を別部材として設ける必要が無く部品点数の増大を抑えることができる。
【0024】
上述した産業用ロボット1の動作を以下に説明する。
【0025】
待機時には材料受け皿22が窪み部25をノズル21の下方にして位置している。このため、ノズル21から垂れた材料の液は材料受け皿22の窪み部25に落ちるので、保持移動手段4やワーク2を汚すことを防止できる。そして、ワーク2が搬送機構8により遮蔽部材3の内部に搬送されて、保持移動手段4のエアチャック12により保持される。ここで材料受け皿22が旋回されてノズル21がワーク2に向き合う。さらに、ワーク2は保持移動手段4により塗布作業を行う位置に設置される。そして、供給手段5から材料を供給すると同時にワーク2を移動させながら塗布作業を進めていく。
【0026】
塗布作業の終了後は、ワーク2を保持移動手段4によりワークパレット13に載置すると共に、材料受け皿22を旋回させてノズル21の下方に位置させる。そして、次のワーク2の塗布作業に取り掛かる。
【0027】
一方、供給手段5が空になったときは、材料が充填された別の供給手段5に交換する。このときは空の供給手段5を取り付け部7から引き抜いて、新たな供給手段5を差し込む。そして、材料受け皿22の基準部26をノズル21の真下に位置させておき、供給手段5のノズル21の先端を基準部26に突き当てて位置決めを行う。
【0028】
なお、上述の実施形態は本発明の好適な実施の一例ではあるがこれに限定されるものではなく本発明の要旨を逸脱しない範囲において種々変形実施可能である。例えば本実施形態では供給手段5は動かないように固定されているが、これには限られず図5〜図7に示すように供給手段5を回転可能に固定するようにしても良い。この場合、産業用ロボット1は、図5に示すように遮蔽部材7に対して回転可能であると共に供給手段5を支持する回転筒27と、回転筒27に取り付けられたプーリ28と、駆動モータ29と、プーリ28と駆動モータ29とに掛け渡されたベルト30とを備えている。そして、駆動モータ29の回転がベルト30およびプーリ28を伝わって回転筒27および供給手段5を回転させる。
【0029】
ここで、ノズル21の先端を斜めに折れ曲がった形状にすることにより、供給手段5の向きによって材料の噴出方向を変更することができる。例えば図6に示すように、供給口6をワーク2の側面に向けることにより当該側面への材料の塗布を容易に行うことができる。よって、ワーク2の位置制御が容易になると共に高精度の塗布作業を行うことができる。
【0030】
また、図7に示すようにノズル21の位置を偏心させると共にノズル21が内側を向くように折り曲げた形状にすることにより、供給手段5を回転させながらワーク2の周囲に材料を塗布することができる。この場合、供給手段5を止めたまま直交座標系でワーク2を移動させるロボットによりワーク2を円運動させるよりも高精度に円運動を行うことができるので、塗布作業の質を高めることができる。
【0031】
さらに、本実施形態では基準部26は材料受け皿22に形成されているが、これには限られず別部材としても良い。あるいは、図8および図9に示すように基準部26を固定筒17の一部に形成するようにしても良い。例えば、図8に示すように固定筒17の下部に形成した段部を基準部26にして供給手段5の先端部を突き当てるようにしたり、あるいは図9に示すように固定筒17の下端部を基準部26にして供給手段5の先端部を突き当てるようにしても良い。いずれの場合も基準部26としての専用の部材を設置する必要が無いので部品点数の増大を抑えることができる。なお、図8および図9に示すようにノズル21の先端が基準部26に直接当接するものでない場合は、供給手段5ごとにノズル21の長さにバラツキがあることから保持移動手段4の初期位置の修正が必要になる。そこで、供給手段5の基準部26に当接する部位とノズル21の先端との実際の距離を予め計測しておき、基準部26に対するノズル21の先端の実際の位置を求めて保持移動手段4の初期位置として設定するようにする。これにより、保持移動手段4の初期位置のティーチング作業を不要にすることができる。
【0032】
そして、本実施形態では固定筒17および供給手段5を透明な材質から形成すると共に目視により材料の残量を確認するようにしているが、これには限られず図10に示すように材料の残量を光学的に検出するセンサ31を設けても良い。この場合、目視では確認し難い状況でも残量を検出することができる。また、これらのように固定筒17および供給手段5は透明であることには限られず、材料の性質や作業状況によっては不透明であっても良い。
【0033】
また、本実施形態では保持移動手段4は3自由度を有するものとしているが、これには限られずワーク2の種類によっては2自由度や1自由度であっても良い。例えば図11に示すように、搬送軌道14の一部14aをワークパレット13およびワーク2ごと昇降可能な昇降機構11を備えた1自由度の保持移動手段4としても良い。この場合、前後方向移動機構9、左右方向移動機構10、エアチャック12が不要になるので、保持移動手段4の簡素化を図ることができる。あるいは、保持移動手段4を利用せずにワークパレット13に載置されたワーク2に対して直接材料を供給するようにしても良い。例えば材料がタンポ印刷の塗料や顔料である場合、ワーク2の厳密な位置決めは不要なので保持移動手段4を利用せずに搬送機構8上のワーク2に直接塗布することができる。
【0034】
さらに、本実施形態では供給する材料は接着剤としているが、これには限られず、液体にコロイド状態で分散している材料、さらに流動性のある固体、例えば微少金属ボールや粉体とする事もできる。即ち、機能性膜材料、染料、顔料、潤滑剤等とすることもできる。また本実施形態では供給する材料は接着剤であると共に供給手段5はシュリンジとしているが、これには限られず供給手段5はインクジェットのような霧化、液滴の噴出、吐出や、さらにタンポ印刷のような転写であるようにしても良い。
【0035】
そして、上述した実施形態では供給手段5から材料を供給するだけであったが、これには限られず一旦供給した材料を吸い取るようにしても良い。例えば材料がオイルであると共にワーク2が動圧軸受けである場合に、供給手段5からワーク2に材料を注入して、その後にワーク2で余剰となった材料を吸い取るようにする。これにより、適量な材料の供給が可能になる。
【0036】
【発明の効果】
以上の説明より明らかなように、請求項1記載の産業用ロボットによれば、供給手段は遮蔽部材の内部に供給口だけを出しているので、供給手段の交換時に作業者や供給手段の外面の塵埃が遮蔽部材の内側に入ってしまうことを抑制できる。また、供給手段は遮蔽部材の取り付け部に固定されたまま移動しないので、複雑な遮蔽構造を取る必要がない。このため、構造の簡素化により装置の小型化と低コスト化を図ることができる。
【0037】
また、請求項2記載の産業用ロボットによれば流体の供給が可能になり、請求項3記載の産業用ロボットによれば微小粉体の供給が可能になる。
【0038】
そして、請求項4記載の産業用ロボットによれば、供給手段は回転可能であるので、直交座標系でワークを移動させて位置決めする従来のロボットに比べて容易に円運動を実現できる。よって、材料のワークへの塗布作業を高精度に実現することができる。
【0039】
また、請求項5記載の産業用ロボットによれば、基準部を備えているので供給手段の位置決めを容易に行うことができる。また、ロボットのティーチング作業を省略することができるので、作業工程を簡略化して作業性を高めることができる。
【図面の簡単な説明】
【図1】本発明の産業用ロボットを示す斜視図である。
【図2】産業用ロボットの保持移動手段を示す斜視図である。
【図3】取り付け部および基準部を示す縦断面正面図である。
【図4】材料受け皿を示す平面図である。
【図5】産業用ロボットの他の実施形態を示す斜視図である。
【図6】ワークの側面に塗布する状態を示す斜視図である。
【図7】ワークの周囲を回転しながら塗布する状態を示す斜視図である。
【図8】基準部の他の実施形態を示す縦断面正面図である。
【図9】基準部の更に他の実施形態を示す縦断面正面図である。
【図10】固定筒とセンサとを示す縦断面正面図である。
【図11】産業用ロボットの更に他の実施形態を示す斜視図である。
【図12】従来の産業用ロボットを示す斜視図である。
【図13】従来の他の産業用ロボットを示す斜視図である。
【図14】従来の更に他の産業用ロボットを示す斜視図である。
【符号の説明】
1 産業用ロボット
2 ワーク
3 遮蔽部材
4 保持移動手段
5 供給手段
6 供給口
7 取り付け部
26 基準部
Claims (5)
- ワークに対し組立や加工等を行う産業用ロボットにおいて、前記産業用ロボットを覆い外部と遮蔽する遮蔽部材と、前記ワークを保持して移動させる保持移動手段と、前記ワークに材料を供給する供給手段と、前記供給手段の供給口を前記遮蔽部材の内側にして前記供給手段を前記遮蔽部材に貫通させて支持する取り付け部とを備えたことを特徴とする産業用ロボット。
- 前記供給手段はシリンジであることを特徴とする請求項1記載の産業用ロボット。
- 前記供給手段は微小粉体の供給装置であることを特徴とする請求項1記載の産業用ロボット。
- 前記供給手段は回転可能であることを特徴とする請求項1から3までのいずれか記載の産業用ロボット。
- 前記供給手段の装着時に前記供給手段の一部を突き当てて位置決めする基準部を備えることを特徴とする請求項1から4までのいずれか記載の産業用ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003058395A JP2004268153A (ja) | 2003-03-05 | 2003-03-05 | 産業用ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003058395A JP2004268153A (ja) | 2003-03-05 | 2003-03-05 | 産業用ロボット |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004268153A true JP2004268153A (ja) | 2004-09-30 |
Family
ID=33121512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003058395A Ceased JP2004268153A (ja) | 2003-03-05 | 2003-03-05 | 産業用ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004268153A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2017037931A1 (ja) * | 2015-09-03 | 2018-04-26 | 株式会社安川電機 | 処理軌跡編集装置、ロボット、物品処理システム、及び物品製造方法 |
-
2003
- 2003-03-05 JP JP2003058395A patent/JP2004268153A/ja not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2017037931A1 (ja) * | 2015-09-03 | 2018-04-26 | 株式会社安川電機 | 処理軌跡編集装置、ロボット、物品処理システム、及び物品製造方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5638768B2 (ja) | ノズル回転機構およびそれを備える塗布装置 | |
| JP5256064B2 (ja) | はんだ供給装置および印刷装置 | |
| JP4643719B2 (ja) | はんだ供給装置、印刷装置および印刷方法 | |
| TWI641446B (zh) | Workpiece supply device and machine tool | |
| TW201902585A (zh) | 基板清洗裝置、基板處理裝置及基板清洗方法 | |
| JP2014233771A (ja) | 多関節ロボット | |
| JP5473670B2 (ja) | 研削装置のチャックテーブルシール機構 | |
| JP2004268153A (ja) | 産業用ロボット | |
| TWI798289B (zh) | 加工裝置 | |
| CN116963868A (zh) | 机床 | |
| JP4034280B2 (ja) | 現像処理装置 | |
| JP6360122B2 (ja) | 排液機構、及び排液機構を備えた工作機械 | |
| JP2012015348A (ja) | スピンナ洗浄装置 | |
| JP5323775B2 (ja) | 基板処理装置 | |
| JP2021094511A (ja) | 回転塗布装置 | |
| CN110416112A (zh) | 清洗装置 | |
| JP3175726U (ja) | 液処理装置 | |
| KR20110062767A (ko) | 드릴장치 및 드릴링시스템 | |
| JP6116850B2 (ja) | 切削装置 | |
| JP3426623B2 (ja) | 液体塗布装置および液体塗布方法 | |
| JP2004074121A (ja) | 塗料供給装置の洗浄装置 | |
| JP2004074120A (ja) | 塗料供給装置 | |
| JP2009226555A (ja) | 切削装置 | |
| KR20110062769A (ko) | 드릴링시스템 | |
| JP2025023410A (ja) | 加工装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Effective date: 20041022 Free format text: JAPANESE INTERMEDIATE CODE: A7424 |
|
| A621 | Written request for application examination |
Effective date: 20050831 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070208 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20070214 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Effective date: 20070412 Free format text: JAPANESE INTERMEDIATE CODE: A523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070926 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071121 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Effective date: 20080521 Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A045 | Written measure of dismissal of application |
Effective date: 20080924 Free format text: JAPANESE INTERMEDIATE CODE: A045 |