JP2005257471A - 回転角検出装置 - Google Patents
回転角検出装置 Download PDFInfo
- Publication number
- JP2005257471A JP2005257471A JP2004069566A JP2004069566A JP2005257471A JP 2005257471 A JP2005257471 A JP 2005257471A JP 2004069566 A JP2004069566 A JP 2004069566A JP 2004069566 A JP2004069566 A JP 2004069566A JP 2005257471 A JP2005257471 A JP 2005257471A
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- angle detection
- rotation
- detection sensor
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 90
- 239000000758 substrate Substances 0.000 claims description 25
- 239000000853 adhesive Substances 0.000 claims description 5
- 230000001070 adhesive effect Effects 0.000 claims description 5
- 239000000463 material Substances 0.000 claims description 4
- 238000003466 welding Methods 0.000 claims description 3
- 238000000034 method Methods 0.000 description 7
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000009429 electrical wiring Methods 0.000 description 2
Images




Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
- Power Steering Mechanism (AREA)
Abstract
【課題】 歯車の回転軸と回転角検出センサの中心軸の位置ずれを低減し、且つ配線を簡素化することのできる回転角検出装置を提供する。
【解決手段】 ハウジング12と、このハウジング12と略並行に所定間隔を持って配置された回路基板14と、ハウジング12と回路基板14との間に配置され、ハウジング12に対して回転可能に取り付けられた歯車11と、この歯車11に設けられた磁石19と、回路基板14の磁石19と対向する位置に配置された回転角検出センサ15とを備える。そして、磁石19の磁極の向きを回転角検出センサ15で検出することにより、歯車11の回転角度を求める。また、回路基板14の下面側に、回転角検出センサ15を固定すると共に、歯車11の回転軸と回転角検出センサ15の中心軸とが一致するように、歯車11を軸支する軸受け部17を備える。
【選択図】 図1
【解決手段】 ハウジング12と、このハウジング12と略並行に所定間隔を持って配置された回路基板14と、ハウジング12と回路基板14との間に配置され、ハウジング12に対して回転可能に取り付けられた歯車11と、この歯車11に設けられた磁石19と、回路基板14の磁石19と対向する位置に配置された回転角検出センサ15とを備える。そして、磁石19の磁極の向きを回転角検出センサ15で検出することにより、歯車11の回転角度を求める。また、回路基板14の下面側に、回転角検出センサ15を固定すると共に、歯車11の回転軸と回転角検出センサ15の中心軸とが一致するように、歯車11を軸支する軸受け部17を備える。
【選択図】 図1
Description
本発明は、例えば車両に搭載されるステアリングの操舵角度を検出する回転角検出装置に関する。
車両に搭載されるステアリングの操舵角を検出する回転角検出装置として、ステアリングの回転と連動して回転する歯車を設け、更に該歯車に磁石を取り付け、この磁石の磁極の向きを固定側に設けたホール素子等の磁気式の回転角検出センサにて検出することにより、ステアリングの操舵角度を求める方式のものが用いられている。
このような回転角検出装置の従来例として、例えば図5に示す構成のものが知られている。この回転角検出装置は、ハウジング101に円形状軸受け102が形成され、磁石103を保持した歯車104の一方の面がこの円形状軸受け102に嵌合されて回転可能に支持される。また、この歯車104の他方の面がハウジング101に回路基板固定部108を介して連結された回路基板105に接しており、回路基板105に対して、歯車104が回転動作する。
更に、回路基板105の歯車104と対向する位置には、回転角検出センサ106が取り付けられているので、該回転角検出センサ106により、磁石103の磁極の向きを検出することができ、ひいては歯車104の回転角度を求めることができる(例えば特開2000−283704号公報参照)
特開2000−283704号公報
しかしながら、上述した従来の回転角検出装置では、ハウジング101に形成された円形状軸受け102により歯車104が軸支されており、また、この歯車104に取り付けられた磁石103は、回路基板105に取り付けられた回転角検出センサ106と対向するように構成されているため、ハウジング101と回路基板105の連結の状態により、磁石103と回転角検出センサ106との間の位置関係にずれが生じることがある。また、回路基板105と回転角検出センサ106の実装状態に関連してずれが生じることがある。これらに起因して回転角度の検出精度が低下するという問題が発生していた。
また、回路基板105に対して歯車104が摺動するので、配線107を回路基板105の上側の面まで引き回す必要があり、回路基板105にスルーホールを形成して配線107を通さなければならず、回路構成が複雑になるばかりでなく、配線作業に多くの手間がかかるという欠点があった。
この発明は、このような従来の課題を解決するためになされたものであり、その目的とするところは、歯車の回転軸と回転角検出センサの中心軸の位置ずれを低減し、且つ配線を簡素化することのできる回転角検出装置を提供することにある。
上記目的を達成するため、本願請求項1に記載の発明は、固定部材と、該固定部材に連結され固定部材と略並行に所定間隔を持って配置された基板と、前記固定部材と前記基板との間に配置され、前記固定部材に対し回転可能に取り付けられた回転部材と、前記回転部材に設けられた磁石と、前記基板の前記磁石と対向する位置に配置された回転角検出センサと、を備え、前記磁石の磁極の向きを前記回転角検出センサにて検出することにより、前記回転部材の回転角度を求める回転角検出装置において、前記基板の前記回転部材側に、前記回転角検出センサを固定すると共に、前記回転部材の回転軸と前記回転角検出センサの中心軸とが一致するように、前記回転部材を軸支する軸受け部を有する回転保持部材を設けたことを特徴とする。
請求項2に記載の発明は、前記回転保持部材は、中央開口部を有する円環形状をなし、前記中央開口部に前記回転角検出センサを配置して該回転角検出センサを固定すると共に、前記軸受け部が、前記中央開口部に対して同心円状に形成されていることを特徴とする。
請求項3に記載の発明は、前記回転保持部材は、前記基板に対して接着材にて固定することを特徴とする。
請求項4に記載の発明は、前記回転保持部材は溶着性材料で形成された複数の突起部を有し、該突起部を前記基板に形成されたスルーホールに貫通させた後、突起部先端を溶着することにより前記基板に固定することを特徴とする。
請求項5に記載の発明は、前記回転角度検出センサに連結される配線が前記回転保持部材と前記基板との間を通り、前記基板の前記回転部材側の面に連結されることを特徴とする。
本願請求項1に係る発明では、基板に設けられた回転保持部材により回転角検出センサを固定するので、実装ずれの発生を防止することができる。また、回転保持部材に設けられた軸受け部により、回転部材を軸支するので、回転角検出センサの中心軸と回転部材の回転軸とを一致させることができ、回転角度の検出精度を著しく向上させることができる。
請求項2に係る発明では、中央開口部を有する円環状の回転保持部材により回転保持部材を固定し、更に、中央開口部に対して同心円状に形成された軸受け部により、回転部材が軸支されるので、回転角検出センサ及びこれに対向する磁石との間の実装ずれをより一層防止することができる。
請求項3に係る発明では、接着材を用いて回転保持部材を基板に固定するので、回転保持部材と基板を堅固に固定することができる。
請求項4に係る発明では、回転保持部材に形成された突起部を基板に形成したスルーホールに貫通させた後、該突起部の先端部を溶着することにより、回転保持部材を基板に固定するので、回転保持部材の固定を堅固にすることができる。
請求項5に記載の発明は、回転保持部材と基板との間に電気接続用の配線を通すので、回転角検出センサが有する電気接続端子と基板の回転部材側の面とを容易に電気的に接続することができ、回路接続の融通性を向上させることができる。
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明の実施形態に係る回転角検出装置の全体構成図である。本実施形態では、回転角を検出する回転体として、車両に搭載されるステアリングを例に挙げて説明する。
図1に示すように、この回転角検出装置は、車両に搭載されるステアリングの回転に対して連動して回転する第一の歯車1と、該第一の歯車1と噛合し第一の歯車1よりも小径の第二の歯車2と、やはり第一の歯車1と噛合し第二の歯車2よりも小径の第三の歯車3を備えている。
第二の歯車2及び第三の歯車3には、それぞれ回転側に磁石5,6が設けられ、固定側にMR方式或いはホールアレイ方式により磁石の磁極の方向を検出する回転角検出センサが設けられているので、各回転角検出センサにより検出された第二の歯車2の回転角度、及び第三の歯車3の回転角度に基づいて、演算処理部4により、第一の歯車1の複数回転に亘る回転角度、ひいてはステアリングの操舵角を求めることができる。
図2は、第二の歯車2或いは第三の歯車3(以下、歯車11として示す)における回転部と固定部との位置関係を示す断面図である。同図に示すように、固定側となるハウジング(固定部材)12には、該ハウジング12と所定間隔を有し略並行に配置された回路基板14が、回路基板固定部13を介して連結されている。
回路基板14のハウジング12側の面(図中下側の面)には、MR方式或いはホールアレイ方式を用いて磁極の方向を検出する回転角検出センサ15が取り付けられており、更に、この回転角検出センサ15を回路基板14に対して堅固に固定するために、該回転角検出センサ15の周囲部には円環形状を有する回転保持部材16が、接着剤により回路基板14に取り付けられている。
即ち、回転保持部材16の中央部に形成された開口部と接するように回転角検出センサ15が取り付けられている。
また、回転保持部材16のハウジング12側(図中下側)の面には、歯車11を軸支する円形状の軸受け部17が設けられており、該軸受け部17にて歯車(回転部材)11が摺動するようになっている。歯車11には、中央部の回転角検出センサ15と対向する位置に磁石19(図1に示す符号5,6に対応)が取り付けられている。そして、歯車11の回転中心と、回転角検出センサ15の中心軸が一致するように配設されている。
更に、回転角検出センサ15に連結される配線18は、回路基板14と回転保持部材16との間の部分を通って、回路基板14の下側となる面に連結されている。
次に、上述のように構成された本実施形態に係る回転角検出装置の作用について説明する。車両のステアリングが操舵されると、図1に示す第一の歯車1がステアリングの回転に伴って回転する。
これにより、第一の歯車1と噛合した第二の歯車2及び第三の歯車3が、それぞれ異なる加速比で回転する。つまり、図2に示す歯車11が回転駆動することになり、歯車11に取り付けられた磁石19の磁極の方向が変化する。
そして、回路基板14に設けられた回転角検出センサ15により、磁石19の磁極の方向が検出されるので、この検出データに基づいて、歯車11の回転角度を検出することができる。
このようにして、本実施形態に係る回転角検出装置では、回転保持部材16を用いて回転角検出センサ15を固定し、歯車11の回転軸と回転角度検出センサ15の中心軸とが一致する配置としているので、回転角検出センサ15の実装ずれを防止することができ、回転角度の検出精度を向上させることができる。
また、接着剤を用いて回転保持部材16を回路基板14に固定するので、回転保持部材16の回路基板14への固定を堅固にすることができ、安定性を向上させることができる。
更に、回転保持部材16に形成された軸受け部17に軸支されて歯車11が回転駆動するので、ハウジング12と回路基板14との間の取り付け誤差が生じた場合や、回路基板に対し回転角検出センサ15の実装ずれが生じた場合でも、これに影響されることなく高精度な回転角度の検出を行うことができる。
また、歯車11が回転保持部材16に形成された軸受け部17と接触して回転するように構成されるので、回路基板14と回転保持部材16との間の部分に配線18を通すことができる。従って、回路基板14のハウジング12側の面(図中下側の面)に配線18を連結することができ、回路基板14への電気的な配線の融通性を向上させることができる。
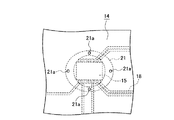
次に、本発明の第2の実施形態について説明する。図3は、第2の実施形態に係る回転角度検出装置の構成を示す断面図、図4は、平面図である。図示のように、固定側となるハウジング(固定部材)12には、前述した第1の実施形態と同様に、ハウジング12と所定間隔を有し略並行に配置された回路基板14が、回路基板固定部13を介して連結されている。
回路基板14のハウジング12側の面(図中下側の面)には、MR方式或いはホールアレイ方式を用いて磁極の方向を検出する回転角検出センサ15が取り付けられており、更に、この回転角検出センサ15を回路基板14に対して堅固に固定するために、該回転角検出センサ15の周囲部には円環形状を有する回転保持部材21が取り付けられている。つまり、回転保持部材21の中央部に形成された開口部と接するように回転角検出センサ15が取り付けられている。
回転保持部材21は、4箇所に溶着性の材料で形成された突起部21aが設けられており、該突起部21aを回路基板14に形成されたスルーホールに挿通させた後、突起部21aの先端部を溶着することにより、回転保持部材21を回路基板14に固定する。
また、回転保持部材21のハウジング12側(図中下側)の面には、歯車11を軸支する円形状の軸受け部22が設けられており、該軸受け部22にて歯車11が摺動するようになっている。歯車11には、中央部の回転角検出センサ15と対向する位置に磁石19が取り付けられている。そして、歯車11の回転中心と、回転角検出センサ15の中心軸が一致するように配設されている。
更に、回転角検出センサ15に連結される配線18は、回路基板14と回転保持部材21との間の部分を通って、回路基板14の下側となる面に連結されている。
次に、上述のように構成された第2の実施形態に係る回転角検出装置の作用について説明する。車両のステアリングが操舵されると、図1に示す第一の歯車1がステアリングの回転に伴って回転する。
これにより、第一の歯車1と噛合した第二の歯車2及び第三の歯車3が、それぞれ異なる加速比で回転する。つまり、図3に示す歯車11が回転駆動することになり、歯車11に取り付けられた磁石19の磁極の方向が変化する。
そして、回路基板14に設けられた回転角検出センサ15により、磁石19の磁極の方向が検出されるので、この検出データに基づいて、歯車11の回転角度を検出することができる。
このようにして、第2の実施形態に係る回転角検出装置では、回転保持部材21を用いて回転角検出センサ15を固定し、歯車11の回転軸と回転角度検出センサ15の中心軸とが一致する配置としているので、回転角検出センサ15の実装ずれを防止することができ、回転角度の検出精度を向上させることができる。
また、回転保持部材21に形成された突起部21aの先端部を溶着することにより、回路基板14に固定するので、回路基板14に対する回転保持部材21の固定を堅固にすることができ、回転保持部材21の安定性を向上させることができる。
更に、回転保持部材21に形成された軸受け部22に軸支されて歯車11が回転駆動するので、ハウジング12と回路基板14との間の取り付け誤差が生じた場合でも、これに影響されることなく高精度な回転角度の検出を行うことができる。
また、歯車11が回転保持部材21に形成された軸受け部22と接触して回転するように構成されるので、回路基板14と回転保持部材21との間の部分に配線18を通すことができる。従って、回路基板14のハウジング12側の面(図中下側の面)に配線18を連結することができ、回路基板14への電気的な配線の融通性を向上させることができる。
以上、本発明の回転角検出装置を図示の実施形態に基づいて説明したが、本発明はこれに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置き換えることができる。
例えば、上述した実施形態では、車両のステアリングの舵角を検出する場合を例に挙げて説明したが、本発明はこれに限定されるものではなく、その他の回転体の回転角度を求める際においても用いることができる。
車両のステアリングの舵角等、磁石を設けその磁極の変化を検出する方式のものにおいて極めて有用である。
1 第一の歯車
2 第二の歯車
3 第三の歯車
4 演算処理部
5,6 磁石
11 歯車(回転部材)
12 ハウジング(固定部材)
13 回路基板固定部
14 回路基板
15 回転角検出センサ
16,21 回転保持部材
17,22 軸受け部
18 配線
19 磁石
21a 突起部
101 ハウジング
102 円形状軸受け
103 磁石
104 歯車
105 回路基板
106 回転角検出センサ
107 配線
108 回路基板固定部
2 第二の歯車
3 第三の歯車
4 演算処理部
5,6 磁石
11 歯車(回転部材)
12 ハウジング(固定部材)
13 回路基板固定部
14 回路基板
15 回転角検出センサ
16,21 回転保持部材
17,22 軸受け部
18 配線
19 磁石
21a 突起部
101 ハウジング
102 円形状軸受け
103 磁石
104 歯車
105 回路基板
106 回転角検出センサ
107 配線
108 回路基板固定部
Claims (5)
- 固定部材と、
該固定部材に連結され固定部材と略並行に所定間隔を持って配置された基板と、
前記固定部材と前記基板との間に配置され、前記固定部材に対し回転可能に取り付けられた回転部材と、
前記回転部材に設けられた磁石と、
前記基板の前記磁石と対向する位置に配置された回転角検出センサと、を備え、前記磁石の磁極の向きを前記回転角検出センサにて検出することにより、前記回転部材の回転角度を求める回転角検出装置において、
前記基板の前記回転部材側に、前記回転角検出センサを固定すると共に、前記回転部材の回転軸と前記回転角検出センサの中心軸とが一致するように、前記回転部材を軸支する軸受け部を有する回転保持部材を設けたことを特徴とする回転角検出装置。 - 前記回転保持部材は、中央開口部を有する円環形状をなし、前記中央開口部に前記回転角検出センサを配置して該回転角検出センサを固定すると共に、前記軸受け部が、前記中央開口部に対して同心円状に形成されていることを特徴とする請求項1に記載の回転角検出装置。
- 前記回転保持部材は、前記基板に対して接着材にて固定することを特徴とする請求項1または請求項2にいずれかに記載の回転角検出装置。
- 前記回転保持部材は溶着性材料で形成された複数の突起部を有し、該突起部を前記基板に形成されたスルーホールに貫通させた後、突起部先端を溶着することにより前記基板に固定することを特徴とする請求項1または請求項2のいずれかに記載の回転角検出装置。
- 前記回転角度検出センサに連結される配線が前記回転保持部材と前記基板との間を通り、前記基板の前記回転部材側の面に連結されることを特徴とする請求項1〜請求項4のいずれか1項に記載の回転角検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004069566A JP2005257471A (ja) | 2004-03-11 | 2004-03-11 | 回転角検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004069566A JP2005257471A (ja) | 2004-03-11 | 2004-03-11 | 回転角検出装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005257471A true JP2005257471A (ja) | 2005-09-22 |
Family
ID=35083331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004069566A Pending JP2005257471A (ja) | 2004-03-11 | 2004-03-11 | 回転角検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005257471A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7322115B2 (en) * | 2002-03-25 | 2008-01-29 | Delphi Technologies, Inc. | Steering column module for a motor vehicle |
| US7604413B2 (en) * | 2004-06-25 | 2009-10-20 | Ntn Corporation | Wheel support bearing assembly with built-in load sensor |
| CN101750100A (zh) * | 2008-12-15 | 2010-06-23 | 东京Cosmos电机株式会社 | 旋转角度传感器 |
| KR101272699B1 (ko) * | 2006-07-25 | 2013-06-10 | 엘지이노텍 주식회사 | 조향각 센싱장치 및 센싱방법 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61161788A (ja) * | 1985-01-10 | 1986-07-22 | オリンパス光学工業株式会社 | 半導体のリ−ドの補強構造 |
| JPH1021783A (ja) * | 1996-06-28 | 1998-01-23 | Hatakeyama Seisakusho:Kk | 薄型金属接点片のプリント基板への固定構造 |
| JP2003209196A (ja) * | 2002-01-11 | 2003-07-25 | Seiko Instruments Inc | 電子デバイスを実装した基板及び、電子デバイスの基板実装方法 |
| JP2003344103A (ja) * | 2002-05-28 | 2003-12-03 | Niles Co Ltd | 回転検出装置 |
| JP2004061428A (ja) * | 2002-07-31 | 2004-02-26 | Koyo Seiko Co Ltd | 回転角検出装置 |
-
2004
- 2004-03-11 JP JP2004069566A patent/JP2005257471A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61161788A (ja) * | 1985-01-10 | 1986-07-22 | オリンパス光学工業株式会社 | 半導体のリ−ドの補強構造 |
| JPH1021783A (ja) * | 1996-06-28 | 1998-01-23 | Hatakeyama Seisakusho:Kk | 薄型金属接点片のプリント基板への固定構造 |
| JP2003209196A (ja) * | 2002-01-11 | 2003-07-25 | Seiko Instruments Inc | 電子デバイスを実装した基板及び、電子デバイスの基板実装方法 |
| JP2003344103A (ja) * | 2002-05-28 | 2003-12-03 | Niles Co Ltd | 回転検出装置 |
| JP2004061428A (ja) * | 2002-07-31 | 2004-02-26 | Koyo Seiko Co Ltd | 回転角検出装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7322115B2 (en) * | 2002-03-25 | 2008-01-29 | Delphi Technologies, Inc. | Steering column module for a motor vehicle |
| US7604413B2 (en) * | 2004-06-25 | 2009-10-20 | Ntn Corporation | Wheel support bearing assembly with built-in load sensor |
| KR101272699B1 (ko) * | 2006-07-25 | 2013-06-10 | 엘지이노텍 주식회사 | 조향각 센싱장치 및 센싱방법 |
| CN101750100A (zh) * | 2008-12-15 | 2010-06-23 | 东京Cosmos电机株式会社 | 旋转角度传感器 |
| JP2010139469A (ja) * | 2008-12-15 | 2010-06-24 | Tokyo Cosmos Electric Co Ltd | 回転角度センサ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107003153B (zh) | 旋转角检测装置和动力转向装置 | |
| US8314607B2 (en) | Rotation angle detector | |
| WO2008075620A1 (ja) | 回転角度検出装置 | |
| JP2019030035A (ja) | 電動アクチュエータ | |
| WO2018190185A1 (ja) | 磁気検出装置、トルクセンサ及び電動パワーステアリング装置 | |
| JP2014149180A (ja) | トルクセンサ | |
| JP2005257471A (ja) | 回転角検出装置 | |
| JP2013120181A (ja) | 回転角度検出装置 | |
| CN115280106B (zh) | 绝对编码器 | |
| JP2008215843A (ja) | 回転センサ | |
| JP7599369B2 (ja) | アブソリュートエンコーダ | |
| JP2008128740A (ja) | 回転センサ | |
| JP6282010B2 (ja) | 位置検出装置 | |
| CN116940806A (zh) | 绝对编码器 | |
| JP5031672B2 (ja) | トルクセンサの組立方法 | |
| JP2016082787A (ja) | モータおよび駆動装置 | |
| JP5479695B2 (ja) | 回転検出装置 | |
| JP2011007734A (ja) | エンコーダ及びエンコーダの取り付け方法 | |
| JP2016099191A (ja) | 回転角検出装置 | |
| JP2019132808A (ja) | 回転角検出装置 | |
| US20210396551A1 (en) | Rotation angle detecting device and electric actuator | |
| JP2010112817A (ja) | 回転トルク検出装置 | |
| JP2009276241A (ja) | 回転角検出装置 | |
| JP2005274198A (ja) | 磁気式エンコーダ | |
| JP2018059740A (ja) | トルクセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060721 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081104 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081111 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090324 |