JP2008237724A - 光画像計測装置 - Google Patents
光画像計測装置 Download PDFInfo
- Publication number
- JP2008237724A JP2008237724A JP2007085237A JP2007085237A JP2008237724A JP 2008237724 A JP2008237724 A JP 2008237724A JP 2007085237 A JP2007085237 A JP 2007085237A JP 2007085237 A JP2007085237 A JP 2007085237A JP 2008237724 A JP2008237724 A JP 2008237724A
- Authority
- JP
- Japan
- Prior art keywords
- light
- scanning
- eye
- signal light
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02041—Interferometers characterised by particular imaging or detection techniques
- G01B9/02044—Imaging in the frequency domain, e.g. by using a spectrometer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/102—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for optical coherence tomography [OCT]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02015—Interferometers characterised by the beam path configuration
- G01B9/02029—Combination with non-interferometric systems, i.e. for measuring the object
- G01B9/0203—With imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/02055—Reduction or prevention of errors; Testing; Calibration
- G01B9/02075—Reduction or prevention of errors; Testing; Calibration of particular errors
- G01B9/02076—Caused by motion
- G01B9/02077—Caused by motion of the object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
- G01B9/02—Interferometers
- G01B9/0209—Low-coherence interferometers
- G01B9/02091—Tomographic interferometers, e.g. based on optical coherence
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2290/00—Aspects of interferometers not specifically covered by any group under G01B9/02
- G01B2290/65—Spatial scanning object beam
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/47—Scattering, i.e. diffuse reflection
- G01N21/4795—Scattering, i.e. diffuse reflection spatially resolved investigating of object in scattering medium
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Ophthalmology & Optometry (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Eye Examination Apparatus (AREA)
Abstract
【解決手段】眼底観察装置1は、低コヒーレンス光L0を信号光LSと参照光LRに分け、被検眼Eを経由した信号光LSと参照ミラー174を経由した参照光LRを重畳させて干渉光LCを生成して検出し、この検出結果を基にOCT画像を形成する。制御部210は、走査ユニット141を制御して信号光LSを螺旋状の軌跡(走査線S)に沿って走査させることで、被検眼Eを螺旋の中心SEの方向に固視させる。また、制御部210は、信号光LSの走査の軌跡以外の可視情報を呈示して被検眼Eを固視させることもできる。
【選択図】図5
Description
ことを特徴とする。
まず、この発明に係る光画像計測装置の実施形態の構成について図1〜図5を参照しながら説明する。ここで、図1は、この発明に係る光画像計測装置としての機能を有する眼底観察装置1の全体構成の一例を表している。図2は、眼底カメラユニット1A内の走査ユニット141の構成の一例を表している。図3は、OCTユニット150の構成の一例を表している。図4は、演算制御装置200のハードウェア構成の一例を表している。図5は、眼底観察装置1の制御系の構成の一例を表している。
眼底観察装置1は、図1に示すように、眼底カメラユニット1A、OCTユニット150及び演算制御装置200を含んで構成される。眼底カメラユニット1Aは、眼底表面の2次元画像を撮影する従来の眼底カメラとほぼ同様の光学系を有している。OCTユニット150は、光画像計測装置として機能する光学系を格納している。演算制御装置200は、各種の演算処理や制御処理等を実行するコンピュータを具備している。
眼底カメラユニット1Aは、光学的に取得されるデータ(撮像装置10、12により検出されるデータ)に基づいて被検眼の眼底の表面の2次元画像を形成するために用いられる。ここで、眼底の表面の2次元画像とは、眼底の表面を撮影したカラー画像やモノクロ画像、更には蛍光画像(フルオレセイン蛍光画像、インドシアニングリーン蛍光画像等)などを表す。眼底カメラユニット1Aは、従来の眼底カメラと同様に、眼底Efを照明する照明光学系100と、この照明光の眼底反射光を撮像装置10に導く撮影光学系120とを備えている。
次に、OCTユニット150の構成について図3を参照しつつ説明する。OCTユニット150は、光学的に取得されるデータ(後述のCCD184により検出されるデータ)に基づいて眼底の断層画像を形成するための装置である。
次に、演算制御装置200の構成について説明する。演算制御装置200は、OCTユニット150のCCD184から入力される検出信号を解析して、眼底Efの断層画像を形成する。このときの解析手法は、従来のフーリエドメインOCTの手法と同様である。
次に、眼底観察装置1の制御系の構成について図5を参照しつつ説明する。
眼底観察装置1の制御系は、演算制御装置200の制御部210を中心に構成される。制御部210は、マイクロプロセッサ201、RAM202、ROM203、ハードディスクドライブ204(制御プログラム204a)、通信インターフェイス209等を含んで構成される。
画像形成部220は、撮像装置10、12からの映像信号に基づいて眼底画像Ef′の画像データを形成する。また、画像形成部220は、OCTユニット150のCCD184からの検出信号に基づいて眼底Efの断層画像の画像データを形成する。
画像処理部230は、画像形成部220により形成された画像の画像データに対して各種の画像処理や解析処理を施す。たとえば、画像処理部230は、画像の輝度補正や分散補正等の各種補正処理などを実行する。
ユーザインターフェイス(User Interface;UI)240には、表示部240Aと操作部240Bが設けられている。表示部240Aは、ディスプレイ207等の表示デバイスにより構成される。また、操作部240Bは、キーボード205やマウス206などの入力デバイスや操作デバイスにより構成される。
信号光LSの走査は、前述のように、走査ユニット141のガルバノミラー141A、141Bの反射面の向きを変更することで行う。制御部210は、ミラー駆動機構241、242をそれぞれ制御することで、ガルバノミラー141A、141Bの反射面の向きをそれぞれ変更し、それにより信号光LSを眼底Ef上において走査する。
眼底観察装置1の使用形態について説明する。以下、眼底観察装置1の2つの使用形態を説明する。第1の使用形態では、螺旋状の軌跡に沿って信号光LSを走査する場合の使用形態を説明する。第2の使用形態では、主走査方向及び副走査方向に信号光LSを走査する場合の使用形態を説明する。第2の使用形態では、前述の可視情報が呈示される。
図9のフローチャートは、螺旋状の軌跡に沿って信号光LSを走査する場合の使用形態の例を表している。
図10のフローチャートは、主走査方向及び副走査方向に信号光LSを走査しつつ可視情報を呈示する場合の使用形態の例を表している。なお、可視情報を呈示する場合、信号光LSの走査態様は任意である。
以上のような眼底観察装置1の作用及び効果について説明する。
以上に説明した構成は、この発明に係る光画像計測装置を好適に実施するための一例に過ぎない。よって、この発明の要旨の範囲内における任意の変形を適宜に施すことが可能である。
1A 眼底カメラユニット
140 LCD
141 走査ユニット
141A、141B ガルバノミラー
150 OCTユニット
160 低コヒーレンス光源
162 光カプラ
174 参照ミラー
180 スペクトロメータ
184 CCD
200 演算制御装置
204a 制御プログラム
210 制御部
220 画像形成部
230 画像処理部
240 ユーザインターフェイス
240A 表示部
240B 操作部
241、242 ミラー駆動機構
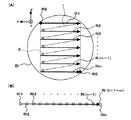
Ri(i=1〜m)、S 走査線
E 被検眼
Ef 眼底
Claims (10)
- 低コヒーレンス光を信号光と参照光とに分割し、被検眼を経由した前記信号光と参照物体を経由した前記参照光とを重畳させて干渉光を生成する干渉光生成手段と、
前記生成された干渉光を検出する検出手段と、
前記被検眼に対する前記信号光の照射位置を走査する走査手段と、
を有し、前記検出手段による検出結果に基づいて前記被検眼の画像を形成する光画像計測装置であって、
前記走査手段により前記信号光が走査されるときに前記被検眼を固視させるための固視情報を前記被検眼の眼底に投影する投影手段を備えることを特徴とする光画像計測装置。 - 前記投影手段は、前記走査手段を制御し、前記被検眼の視線を所定方向に誘導するように前記信号光を走査させる制御手段を含む、
ことを特徴とする請求項1に記載の光画像計測装置。 - 前記制御手段は、渦巻き状の軌跡に沿って前記信号光を走査させる、
ことを特徴とする請求項1に記載の光画像計測装置。 - 前記投影手段は、前記信号光の走査の軌跡以外の可視情報を前記固視情報として投影する、
ことを特徴とする請求項1に記載の光画像計測装置。 - 前記投影手段は、前記眼底に対する前記可視情報の投影位置を移動させる、
ことを特徴とする請求項4に記載の光画像計測装置。 - 前記投影手段は、前記被検眼の視線を所定方向に誘導するように前記可視情報の投影位置を移動させる、
ことを特徴とする請求項5に記載の光画像計測装置。 - 前記投影手段は、少なくとも前記被検眼の視野中心に向かう方向に前記可視情報を移動させる、
ことを特徴とする請求項5に記載の光画像計測装置。 - 前記投影手段は、前記可視情報を表示する表示手段と、前記表示された可視情報を前記眼底に投影させる投影光学系とを含む、
ことを特徴とする請求項4〜請求項7のいずれか一項に記載の光画像計測装置。 - 前記投影手段は、光源と、前記光源から出力された光を前記可視情報として前記眼底に投影する投影光学系とを含む、
ことを特徴とする請求項4〜請求項7のいずれか一項に記載の光画像計測装置。 - 前記走査手段により前記信号光が走査される前に前記被検眼に固視標を投影する固視標投影手段を更に備え、
前記投影手段は、前記所定方向として前記固視標の投影位置と同じ方向に、前記被検眼を誘導するように前記固視情報を投影する、
ことを特徴とする請求項2又は請求項6に記載の光画像計測装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007085237A JP4994911B2 (ja) | 2007-03-28 | 2007-03-28 | 光画像計測装置 |
| CN200810084550.0A CN101273881A (zh) | 2007-03-28 | 2008-03-25 | 光图像计测装置 |
| US12/055,693 US20080239240A1 (en) | 2007-03-28 | 2008-03-26 | Optical image measurement device |
| EP08005868A EP1975550A1 (en) | 2007-03-28 | 2008-03-27 | Optical image measurement device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007085237A JP4994911B2 (ja) | 2007-03-28 | 2007-03-28 | 光画像計測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008237724A true JP2008237724A (ja) | 2008-10-09 |
| JP4994911B2 JP4994911B2 (ja) | 2012-08-08 |
Family
ID=39539614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007085237A Active JP4994911B2 (ja) | 2007-03-28 | 2007-03-28 | 光画像計測装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20080239240A1 (ja) |
| EP (1) | EP1975550A1 (ja) |
| JP (1) | JP4994911B2 (ja) |
| CN (1) | CN101273881A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010113476A1 (ja) * | 2009-04-03 | 2010-10-07 | 株式会社トプコン | 光画像計測装置 |
| JP2016097251A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社トプコン | 眼科装置 |
| JP2017104217A (ja) * | 2015-12-08 | 2017-06-15 | 株式会社トプコン | 眼科撮影装置 |
| JP2024010107A (ja) * | 2021-11-12 | 2024-01-23 | 株式会社トプコン | 眼をイメージングするための装置、及び方法 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102599887B (zh) * | 2011-12-22 | 2013-10-30 | 中国科学院自动化研究所 | 一种基于螺旋扫描轨道的光学投影断层成像方法 |
| EP2865323B1 (en) * | 2013-10-23 | 2022-02-16 | Canon Kabushiki Kaisha | Retinal movement tracking in optical coherence tomography |
| EP3021071B1 (de) | 2014-11-12 | 2020-09-23 | Haag-Streit Ag | Vermessungsverfahren in der Ophthalmologie |
| JP2018061622A (ja) * | 2016-10-11 | 2018-04-19 | オプトス ピーエルシー | 眼底観察装置 |
| JP2019154996A (ja) * | 2018-03-16 | 2019-09-19 | 株式会社トプコン | 眼科装置、及び眼科情報処理装置 |
| CN114903425B (zh) * | 2022-05-06 | 2024-03-12 | 山东探微医疗技术有限公司 | 一种降低对焦时人眼注视疲劳的可见光oct装置及方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1033484A (ja) * | 1996-07-21 | 1998-02-10 | Topcon Corp | 眼科装置 |
| JPH11325849A (ja) * | 1998-03-30 | 1999-11-26 | Carl Zeiss Jena Gmbh | スペクトル干渉に基づく光学・トモグラフィ―および光学表面プロファイル測定装置 |
| JP2000296108A (ja) * | 1999-04-15 | 2000-10-24 | Canon Inc | 眼科検査装置 |
| JP2002139421A (ja) * | 2000-11-01 | 2002-05-17 | Fuji Photo Film Co Ltd | 光断層画像取得装置 |
| JP2003000543A (ja) * | 2001-06-11 | 2003-01-07 | Carl Zeiss Jena Gmbh | 眼のコヒーレンス・トポグラフィック・レイトレーシング測定のための装置 |
| WO2005040718A1 (en) * | 2003-10-14 | 2005-05-06 | University Of Kent | Spectral interferometry method and apparatus |
| WO2005080912A1 (fr) * | 2004-01-22 | 2005-09-01 | Centre National De La Recherche Scientifique (Cnrs) | Dispositif et procede pour mesurer le contraste des franges dans un interferometre de michelson, et systeme d'examen de l'oeil incluant un tel dispositif |
| JP2006187482A (ja) * | 2005-01-07 | 2006-07-20 | Nidek Co Ltd | 眼屈折力測定装置 |
| JP2006212153A (ja) * | 2005-02-02 | 2006-08-17 | Nidek Co Ltd | 眼科撮影装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPQ139899A0 (en) * | 1999-07-02 | 1999-07-29 | University Of Western Australia, The | Closed loop optical coherence topography |
| CA2515109A1 (en) * | 2003-02-05 | 2004-08-26 | James L. Lambert | Non-invasive in vivo measurement of macular carotenoids |
| GB2411066B (en) * | 2004-02-14 | 2009-04-29 | Oti Ophthalmic Technologies | Compact high resolution imaging apparatus |
| US7452080B2 (en) * | 2004-06-10 | 2008-11-18 | Optimedica Corporation | Scanning ophthalmic fixation method and apparatus |
| WO2006078802A1 (en) * | 2005-01-21 | 2006-07-27 | Massachusetts Institute Of Technology | Methods and apparatus for optical coherence tomography scanning |
| JP4855150B2 (ja) * | 2006-06-09 | 2012-01-18 | 株式会社トプコン | 眼底観察装置、眼科画像処理装置及び眼科画像処理プログラム |
-
2007
- 2007-03-28 JP JP2007085237A patent/JP4994911B2/ja active Active
-
2008
- 2008-03-25 CN CN200810084550.0A patent/CN101273881A/zh active Pending
- 2008-03-26 US US12/055,693 patent/US20080239240A1/en not_active Abandoned
- 2008-03-27 EP EP08005868A patent/EP1975550A1/en not_active Withdrawn
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1033484A (ja) * | 1996-07-21 | 1998-02-10 | Topcon Corp | 眼科装置 |
| JPH11325849A (ja) * | 1998-03-30 | 1999-11-26 | Carl Zeiss Jena Gmbh | スペクトル干渉に基づく光学・トモグラフィ―および光学表面プロファイル測定装置 |
| JP2000296108A (ja) * | 1999-04-15 | 2000-10-24 | Canon Inc | 眼科検査装置 |
| JP2002139421A (ja) * | 2000-11-01 | 2002-05-17 | Fuji Photo Film Co Ltd | 光断層画像取得装置 |
| JP2003000543A (ja) * | 2001-06-11 | 2003-01-07 | Carl Zeiss Jena Gmbh | 眼のコヒーレンス・トポグラフィック・レイトレーシング測定のための装置 |
| WO2005040718A1 (en) * | 2003-10-14 | 2005-05-06 | University Of Kent | Spectral interferometry method and apparatus |
| WO2005080912A1 (fr) * | 2004-01-22 | 2005-09-01 | Centre National De La Recherche Scientifique (Cnrs) | Dispositif et procede pour mesurer le contraste des franges dans un interferometre de michelson, et systeme d'examen de l'oeil incluant un tel dispositif |
| JP2006187482A (ja) * | 2005-01-07 | 2006-07-20 | Nidek Co Ltd | 眼屈折力測定装置 |
| JP2006212153A (ja) * | 2005-02-02 | 2006-08-17 | Nidek Co Ltd | 眼科撮影装置 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010113476A1 (ja) * | 2009-04-03 | 2010-10-07 | 株式会社トプコン | 光画像計測装置 |
| JP2010243280A (ja) * | 2009-04-03 | 2010-10-28 | Topcon Corp | 光画像計測装置 |
| US8879069B2 (en) | 2009-04-03 | 2014-11-04 | Kabushiki Kaisha Topcon | Optical image measurement device |
| JP2016097251A (ja) * | 2014-11-26 | 2016-05-30 | 株式会社トプコン | 眼科装置 |
| JP2017104217A (ja) * | 2015-12-08 | 2017-06-15 | 株式会社トプコン | 眼科撮影装置 |
| JP2024010107A (ja) * | 2021-11-12 | 2024-01-23 | 株式会社トプコン | 眼をイメージングするための装置、及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4994911B2 (ja) | 2012-08-08 |
| CN101273881A (zh) | 2008-10-01 |
| EP1975550A1 (en) | 2008-10-01 |
| US20080239240A1 (en) | 2008-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5138977B2 (ja) | 光画像計測装置 | |
| JP4971864B2 (ja) | 光画像計測装置及びそれを制御するプログラム | |
| JP4896794B2 (ja) | 光画像計測装置、それを制御するプログラム及び光画像計測方法 | |
| JP4971863B2 (ja) | 光画像計測装置 | |
| JP4921201B2 (ja) | 光画像計測装置及び光画像計測装置を制御するプログラム | |
| JP5523658B2 (ja) | 光画像計測装置 | |
| JP4869756B2 (ja) | 眼底観察装置 | |
| JP4996918B2 (ja) | 光画像計測装置及び光画像計測装置を制御するプログラム | |
| JP4996917B2 (ja) | 光画像計測装置及び光画像計測装置を制御するプログラム | |
| JP4971872B2 (ja) | 眼底観察装置及びそれを制御するプログラム | |
| JP5117787B2 (ja) | 光画像計測装置 | |
| JP4864515B2 (ja) | 眼底観察装置 | |
| JP4994911B2 (ja) | 光画像計測装置 | |
| JP5367047B2 (ja) | 眼底観察装置 | |
| JP2007181631A (ja) | 眼底観察装置 | |
| JP2007181632A (ja) | 眼底観察装置 | |
| JP5209143B2 (ja) | 眼底観察装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20081217 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120412 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120508 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120509 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150518 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4994911 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |