JP2009098044A - 形状測定装置 - Google Patents
形状測定装置 Download PDFInfo
- Publication number
- JP2009098044A JP2009098044A JP2007270963A JP2007270963A JP2009098044A JP 2009098044 A JP2009098044 A JP 2009098044A JP 2007270963 A JP2007270963 A JP 2007270963A JP 2007270963 A JP2007270963 A JP 2007270963A JP 2009098044 A JP2009098044 A JP 2009098044A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- test object
- irradiation
- light
- slit light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Optical Radar Systems And Details Thereof (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
【解決手段】
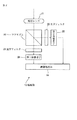
この3次元形状測定装置10は、第1投光部11、第2投光部12、撮像部13、および画像処理部14を備える。第1投光部11と第2投光部12とは、異なる照射角で被検物1を照射するので、一方からのスリット光が正反射したとしても、それと同時に他方からのスリット光が正反射することはない。よって、正反射が生じていない方の投光部の照射光の反射光を撮像した画像を採用し、被検物1の3次元形状を解析する。本発明は、スリット光を用いた三角測量により被検物の3次元形状を測定する測定装置に採用することができる。
【選択図】図1
Description
10 3次元形状測定装置
11 第1投光部
12 第2投光部
13 撮像部
14 画像処理部
15 制御部
16 ステージ
17 ステージ移動部
18 反射部材
21 撮影レンズ
22 ハーフプリズム
23 光学フィルタ
24 第1撮像素子
25 光学フィルタ
26 第2撮像素子
30 3次元形状測定装置
31 第1照射角調整部
32 第2照射角調整部
33 制御部
34 画像処理部
40 3次元形状測定装置
41 第1投光部移動部
42 第2投光部移動部
43 制御部
Claims (7)
- スリット光を用いた三角測量により被検物の形状を測定する形状測定装置において、
前記被検物に対してそれぞれ異なる方向に配置され、固定された照射角でスリット光を照射する複数の照射手段と、
前記被検物に対する前記複数の照射手段のいずれの方向とも異なる方向に配置され、各照射手段によってスリット光が照射された前記被検物を、それぞれの照射手段に対応する複数の画像として撮像する撮像手段と、
前記照射手段の固定された照射角と、前記撮像手段と前記照射手段との間の固定された基線長とに基づき、前記撮像手段によって撮像された前記複数の画像を解析し、前記撮像手段から前記被検物までの距離を演算する演算手段と
を備えることを特徴とする形状測定装置。 - スリット光を用いた三角測量により被検物の形状を測定する形状測定装置において、
前記被検物に対してそれぞれ異なる方向に配置され、スリット光を照射する複数の照射手段と、
前記被検物に対する前記複数の照射手段のいずれの方向とも異なる方向に配置され、各照射手段によってスリット光が照射された前記被検物を、それぞれの照射手段に対応する複数の画像として撮像する撮像手段と、
前記照射手段の照射角を調整する調整手段と、
前記調整手段によって調整された前記照射手段の前記照射角と、前記撮像手段と前記照射手段との間の固定された基線長とに基づき、前記撮像手段によって撮像された前記複数の画像を解析し、前記撮像手段から前記被検物までの距離を演算する演算手段と
を備えることを特徴とする形状測定装置。 - スリット光を用いた三角測量により被検物の形状を測定する形状測定装置において、
前記被検物に対してそれぞれ異なる方向に配置され、スリット光を照射する複数の照射手段と、
前記被検物に対する前記複数の照射手段のいずれの方向とも異なる方向に配置され、各照射手段によってスリット光が照射された前記被検物を、それぞれの照射手段に対応する複数の画像として撮像する撮像手段と、
前記照射手段を移動させることにより、前記撮像手段と前記照射手段との間の基線長を変更する変更手段と、
前記照射手段の固定された照射角と、前記変更手段によって変更された前記撮像手段と前記照射手段との間の前記基線長とに基づき、前記撮像手段によって撮像された前記複数の画像を解析し、前記撮像手段から前記被検物までの距離を演算する演算手段と
を備えることを特徴とする形状測定装置。 - 前記複数の照射手段は、照射するスリット光のパターン、波長、または強度のうち、少なくとも1つがそれぞれ異なる
ことを特徴とする請求項1乃至3に記載の形状測定装置。 - 前記複数の照射手段によるスリット光の照射タイミングを制御する制御手段を
さらに備えることを特徴とする請求項1乃至4に記載の形状測定装置。 - 前記被検物が載置されるステージを移動させる移動手段を
さらに備えることを特徴とする請求項1に記載の形状測定装置。 - 前記ステージには、完全拡散面を有する反射部材も載置される
ことを特徴とする請求項2または3に記載の形状測定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270963A JP2009098044A (ja) | 2007-10-18 | 2007-10-18 | 形状測定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270963A JP2009098044A (ja) | 2007-10-18 | 2007-10-18 | 形状測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009098044A true JP2009098044A (ja) | 2009-05-07 |
| JP2009098044A5 JP2009098044A5 (ja) | 2010-12-09 |
Family
ID=40701186
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007270963A Pending JP2009098044A (ja) | 2007-10-18 | 2007-10-18 | 形状測定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009098044A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014006149A (ja) * | 2012-06-25 | 2014-01-16 | Nikon Corp | 形状測定装置、構造物製造システム、形状測定方法、構造物製造方法、および形状測定プログラム |
| JP2017026584A (ja) * | 2015-07-28 | 2017-02-02 | ブラザー工業株式会社 | 三次元形状測定装置 |
| WO2025203396A1 (ja) * | 2024-03-27 | 2025-10-02 | 株式会社ニコン | 形状測定システム、構造物の製造方法、構造物製造システム、及び形状測定方法 |
| WO2025203395A1 (ja) * | 2024-03-27 | 2025-10-02 | 株式会社ニコン | 形状測定システム、構造物の製造方法、構造物製造システム、及び形状測定方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001324313A (ja) * | 2000-05-16 | 2001-11-22 | Koichi Nakano | 三次元形状計測装置 |
| JP2003185420A (ja) * | 2001-10-10 | 2003-07-03 | Murata Mfg Co Ltd | 三次元形状測定方法、三次元形状測定装置 |
| JP2004037251A (ja) * | 2002-07-03 | 2004-02-05 | Fotonikusu:Kk | 表面形状測定装置および表面形状測定方法 |
| JP2004309240A (ja) * | 2003-04-04 | 2004-11-04 | Olympus Corp | 3次元形状測定装置 |
-
2007
- 2007-10-18 JP JP2007270963A patent/JP2009098044A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001324313A (ja) * | 2000-05-16 | 2001-11-22 | Koichi Nakano | 三次元形状計測装置 |
| JP2003185420A (ja) * | 2001-10-10 | 2003-07-03 | Murata Mfg Co Ltd | 三次元形状測定方法、三次元形状測定装置 |
| JP2004037251A (ja) * | 2002-07-03 | 2004-02-05 | Fotonikusu:Kk | 表面形状測定装置および表面形状測定方法 |
| JP2004309240A (ja) * | 2003-04-04 | 2004-11-04 | Olympus Corp | 3次元形状測定装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014006149A (ja) * | 2012-06-25 | 2014-01-16 | Nikon Corp | 形状測定装置、構造物製造システム、形状測定方法、構造物製造方法、および形状測定プログラム |
| JP2017026584A (ja) * | 2015-07-28 | 2017-02-02 | ブラザー工業株式会社 | 三次元形状測定装置 |
| WO2025203396A1 (ja) * | 2024-03-27 | 2025-10-02 | 株式会社ニコン | 形状測定システム、構造物の製造方法、構造物製造システム、及び形状測定方法 |
| WO2025203395A1 (ja) * | 2024-03-27 | 2025-10-02 | 株式会社ニコン | 形状測定システム、構造物の製造方法、構造物製造システム、及び形状測定方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10788318B2 (en) | Three-dimensional shape measurement apparatus | |
| JP5341351B2 (ja) | 共焦点顕微鏡システムの基本原理に基づく測定装置及び方法 | |
| CN101652626B (zh) | 形状测定装置及形状测定方法 | |
| KR101659302B1 (ko) | 3차원 형상 측정장치 | |
| JP2006515676A (ja) | 2−dおよび表面凹凸形状の同時検査のための方法および装置 | |
| JP6417645B2 (ja) | 表面形状測定装置のアライメント方法 | |
| US10803623B2 (en) | Image processing apparatus | |
| TWI448681B (zh) | 物件之二維與三維光學檢視方法及設備與物件之光學檢視資料的取得方法及設備 | |
| CN107121084B (zh) | 测量方法和测量程序 | |
| JP4090860B2 (ja) | 3次元形状測定装置 | |
| JP6945415B2 (ja) | 画像測定装置の調整方法 | |
| JP2010528314A (ja) | 立体形状測定装置 | |
| JP7664524B2 (ja) | 亀裂検出装置及び亀裂検出装置の制御方法 | |
| JP2009098044A (ja) | 形状測定装置 | |
| JP2013228264A (ja) | 突出部高さ測定装置 | |
| JP2000111490A (ja) | 塗装面の検出装置 | |
| KR101875467B1 (ko) | 3차원 형상 측정 장치 및 측정 방법 | |
| KR100870922B1 (ko) | 다중 간섭계를 이용한 3차원형상 측정시스템 | |
| KR101527764B1 (ko) | 레이저 간섭계를 이용한 3차원 형상 검사장치 | |
| JP2018146497A (ja) | 表面形状測定方法および表面形状測定装置 | |
| KR100887184B1 (ko) | 부분 경면 물체의 형상측정 장치 및 그 방법 | |
| JP6273109B2 (ja) | 光干渉測定装置 | |
| JP2009511932A (ja) | 映像測定装置及びその方法 | |
| KR20080088946A (ko) | 입체 형상 검사 장치 및 그를 이용한 입체 형상 검사 방법 | |
| KR102883558B1 (ko) | 다수의 영상 정보를 획득하는 입체형상 측정장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101014 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101015 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120508 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120709 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120814 |