JP2009183235A - 管理機 - Google Patents
管理機 Download PDFInfo
- Publication number
- JP2009183235A JP2009183235A JP2008028179A JP2008028179A JP2009183235A JP 2009183235 A JP2009183235 A JP 2009183235A JP 2008028179 A JP2008028179 A JP 2008028179A JP 2008028179 A JP2008028179 A JP 2008028179A JP 2009183235 A JP2009183235 A JP 2009183235A
- Authority
- JP
- Japan
- Prior art keywords
- soil
- cultivator
- use position
- management machine
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000002689 soil Substances 0.000 claims description 54
- 229910052571 earthenware Inorganic materials 0.000 claims description 22
- 238000012258 culturing Methods 0.000 claims description 21
- 210000000078 claw Anatomy 0.000 claims description 9
- 230000015572 biosynthetic process Effects 0.000 claims description 8
- 230000002093 peripheral effect Effects 0.000 claims description 7
- 238000003971 tillage Methods 0.000 claims description 5
- 230000005540 biological transmission Effects 0.000 description 14
- 238000003780 insertion Methods 0.000 description 7
- 230000037431 insertion Effects 0.000 description 7
- 230000000149 penetrating effect Effects 0.000 description 6
- 238000003860 storage Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 4
- 238000005096 rolling process Methods 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 239000002828 fuel tank Substances 0.000 description 2
- 239000004570 mortar (masonry) Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000002040 relaxant effect Effects 0.000 description 1
Images




Landscapes
- Soil Working Implements (AREA)
Abstract
【解決手段】
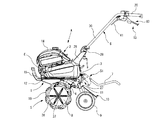
機体フレームに支持体を介して移動輪を転動自在に取り付け、同支持体に培土器を取り付けると共に、培土器は、培土機能を果たす培土使用位置と、培土機能を果たさない培土不使用位置とに位置変更自在となしている。このようにして、培土器を、培土機能を果たす培土使用位置と、培土機能を果たさない培土不使用位置とに位置変更自在となしているために、同培土器の取り付け・取り外し作業の手間をなくすことができる。
【選択図】図1
Description
1 機体フレーム
7 抵抗棒
9 移動輪
10 培土器形成体
11 支持体
17 耕耘軸
18,19 耕耘爪
21 基部片
22 支持片
35 干渉回避用間隙
Claims (4)
- 左右方向に伸延して周面に複数の耕耘爪を取り付けた耕耘軸の後方に、左右一対の移動輪を配設した歩行型の管理機において、
機体フレームに支持体を介して移動輪を転動自在に取り付け、同支持体に培土器を取り付けると共に、
培土器は、培土機能を果たす培土使用位置と、培土機能を果たさない培土不使用位置とに位置変更自在となしたことを特徴とする管理機。 - 培土器は、前記支持体に左右一対の培土器形成体を取り付けて形成すると共に、
各培土器形成体は、移動輪の前方と外側方を遮蔽して培土機能を果たす培土使用位置と、移動輪の上方と内側方を遮蔽してフェンダー機能を果たす培土不使用位置とに位置変更自在となしたことを特徴とする請求項1記載の管理機。 - 前記支持体は、機体フレームに取り付ける基部片と、同基部片から垂設した左右一対の支持片と、各支持片にその軸線廻りに摺動回転させて位置変更自在に取り付けた取付片とを具備し、
各取付片に各移動輪を転動自在に取り付けると共に、各取付片に各培土器形成体を取り付けて、各取付片を介して各培土器形成体を培土使用位置と培土不使用位置とに位置変更可能となしたことを特徴とする請求項2記載の管理機。 - 機体フレームに、耕耘作業時に使用する抵抗棒と、移動時及び培土時に使用する移動輪との相互の使用位置を振り替え自在に取り付けると共に、
培土使用位置において、左右に近接して対向する培土器形成体の端部同士の間に干渉回避用間隙を設け、同干渉回避用間隙を介して抵抗棒と各培土器形成体との干渉を回避するようにしたことを特徴とする請求項2又は3記載の管理機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008028179A JP5149027B2 (ja) | 2008-02-07 | 2008-02-07 | 管理機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008028179A JP5149027B2 (ja) | 2008-02-07 | 2008-02-07 | 管理機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009183235A true JP2009183235A (ja) | 2009-08-20 |
| JP5149027B2 JP5149027B2 (ja) | 2013-02-20 |
Family
ID=41067203
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008028179A Expired - Fee Related JP5149027B2 (ja) | 2008-02-07 | 2008-02-07 | 管理機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5149027B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012070659A (ja) * | 2010-09-28 | 2012-04-12 | Iseki & Co Ltd | 管理作業機 |
| JP2013099356A (ja) * | 2013-01-31 | 2013-05-23 | Iseki & Co Ltd | 歩行型耕耘機 |
| JP2014143978A (ja) * | 2013-01-30 | 2014-08-14 | Iseki & Co Ltd | 管理機 |
| JP2014212708A (ja) * | 2013-04-23 | 2014-11-17 | 三菱農機株式会社 | 歩行型管理機 |
| JP2015163085A (ja) * | 2015-06-15 | 2015-09-10 | 井関農機株式会社 | 歩行型耕耘機 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6351641B2 (ja) * | 1981-03-27 | 1988-10-14 | Katsu Kawasaki | |
| JPH084801Y2 (ja) * | 1990-01-31 | 1996-02-14 | ヤンマー農機株式会社 | 畝整形機の整形装置 |
| JP2001269012A (ja) * | 2000-03-27 | 2001-10-02 | Mitsubishi Agricult Mach Co Ltd | 移動農機の作業機等取付装置 |
| JP2003111502A (ja) * | 2001-10-04 | 2003-04-15 | Nikkari Co Ltd | 管理機 |
| JP2007097443A (ja) * | 2005-09-30 | 2007-04-19 | Iseki & Co Ltd | 歩行型耕耘装置 |
-
2008
- 2008-02-07 JP JP2008028179A patent/JP5149027B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6351641B2 (ja) * | 1981-03-27 | 1988-10-14 | Katsu Kawasaki | |
| JPH084801Y2 (ja) * | 1990-01-31 | 1996-02-14 | ヤンマー農機株式会社 | 畝整形機の整形装置 |
| JP2001269012A (ja) * | 2000-03-27 | 2001-10-02 | Mitsubishi Agricult Mach Co Ltd | 移動農機の作業機等取付装置 |
| JP2003111502A (ja) * | 2001-10-04 | 2003-04-15 | Nikkari Co Ltd | 管理機 |
| JP2007097443A (ja) * | 2005-09-30 | 2007-04-19 | Iseki & Co Ltd | 歩行型耕耘装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012070659A (ja) * | 2010-09-28 | 2012-04-12 | Iseki & Co Ltd | 管理作業機 |
| JP2014143978A (ja) * | 2013-01-30 | 2014-08-14 | Iseki & Co Ltd | 管理機 |
| JP2013099356A (ja) * | 2013-01-31 | 2013-05-23 | Iseki & Co Ltd | 歩行型耕耘機 |
| JP2014212708A (ja) * | 2013-04-23 | 2014-11-17 | 三菱農機株式会社 | 歩行型管理機 |
| JP2015163085A (ja) * | 2015-06-15 | 2015-09-10 | 井関農機株式会社 | 歩行型耕耘機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5149027B2 (ja) | 2013-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5149027B2 (ja) | 管理機 | |
| JP5242466B2 (ja) | 歩行型管理機 | |
| JP2020028309A (ja) | 農作業機 | |
| JP2012016284A (ja) | 歩行型管理機 | |
| JP6134423B2 (ja) | 耕耘作業機 | |
| JP4965476B2 (ja) | 管理機 | |
| JP2008278757A (ja) | ロータリ作業機のエプロン跳ね上げ補助装置 | |
| JP5679877B2 (ja) | 耕耘作業機 | |
| JP6000815B2 (ja) | エプロン跳ね上げ補助機構及びこれを備える耕耘作業機 | |
| JP2011139639A (ja) | 管理機 | |
| JP4907495B2 (ja) | 畦塗り機 | |
| JP5870360B2 (ja) | ロータリ耕耘装置 | |
| JP2013039089A (ja) | 耕耘作業機 | |
| JP2011109962A (ja) | 歩行型農作業機 | |
| JP2008148574A (ja) | 農作業機及びこの移動方法 | |
| JP4347600B2 (ja) | 小型移動農機 | |
| JP5281662B2 (ja) | 歩行型管理機 | |
| JP5863169B2 (ja) | 農作業機 | |
| JP2008136443A (ja) | 農作業機 | |
| JP5618906B2 (ja) | 農作業機 | |
| JP4611188B2 (ja) | 歩行型の管理機 | |
| JP5921075B2 (ja) | 耕耘作業機 | |
| JP5355212B2 (ja) | 農作業機 | |
| JP2008253193A (ja) | ロータリ作業機のエプロン跳ね上げロック装置 | |
| JP5058223B2 (ja) | 駆動型対地作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120426 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121129 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5149027 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |