JP2009295709A - マーク認識システム、マーク認識方法および表面実装機 - Google Patents
マーク認識システム、マーク認識方法および表面実装機 Download PDFInfo
- Publication number
- JP2009295709A JP2009295709A JP2008146509A JP2008146509A JP2009295709A JP 2009295709 A JP2009295709 A JP 2009295709A JP 2008146509 A JP2008146509 A JP 2008146509A JP 2008146509 A JP2008146509 A JP 2008146509A JP 2009295709 A JP2009295709 A JP 2009295709A
- Authority
- JP
- Japan
- Prior art keywords
- mark
- camera
- substrate
- drive
- thermal deformation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Supply And Installment Of Electrical Components (AREA)
Abstract
【解決手段】ユニット6に設けられた複数のカメラのうちの一のカメラ91を、各較正用マークBM1〜BM3の認識可能位置に移動させて、複数の較正用マークBM1〜BM3を認識する。この較正用マーク認識結果を用いて駆動機構7の熱変形に関する熱変形情報を求める。熱変形情報に基づきユニット6の駆動を較正することによって基台11上の基板3に付された基板上マークFM1、FM2を認識可能な位置に一のカメラ91を移動させて基板上マークFM1、FM2を認識する。複数のカメラの相対位置情報と熱変形情報とに基づき駆動機構7の駆動を較正することによって基板上マークFM1、FM2を認識可能な位置に一のカメラ以外のカメラ92を移動させて基板上マークFM1、FM2を認識する。
【選択図】図6
Description
11…基台
3…基板
31…基板搬送経路
4…実装制御ユニット(制御手段)
42…メモリ(記憶手段)
6…ヘッドユニット(ユニット)
7…ヘッド駆動機構(駆動機構)
751…ボールねじ軸
761…ボールねじ軸
762…ボールナット
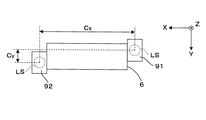
91…メインカメラ
92…サブカメラ
BM1、BM2、BM3…ベースマーク
FM1、FM2…フィデューシャルマーク
Z…鉛直方向
Cx…X軸方向カメラ間距離(カメラの相対位置情報)
Cy…Y軸方向カメラ間距離(カメラの相対位置情報)
Claims (8)
- 複数の較正用マークを有する基台と、
前記基台の鉛直方向上側で複数のカメラを保持するユニットと、
前記鉛直方向に直交する方向に前記ユニットを駆動する駆動機構と、
前記駆動機構による前記ユニットの駆動を制御して前記複数のカメラの相対位置関係を保持したまま前記カメラを移動させる制御手段と、
前記複数のカメラの相対位置関係に関する相対位置情報を記憶する記憶手段と
を備え、
前記制御手段は、前記複数のカメラのうちの一のカメラを前記各較正用マークの認識可能位置に移動させることで得られる前記複数の較正用マークの認識結果を用いて前記駆動機構の熱変形に関する熱変形情報を求め、
前記熱変形情報に基づき前記ユニットの駆動を較正することによって前記基台上の基板に付された基板上マークを認識可能な位置に前記一のカメラを移動させて前記基板上マークを認識し、
前記相対位置情報と前記熱変形情報とに基づき前記ユニットの駆動を較正することによって前記基板上マークを認識可能な位置に前記一のカメラ以外のカメラを移動させて前記基板上マークを認識することを特徴とするマーク認識システム。 - 前記駆動機構は、前記鉛直方向に直交する第1軸方向に前記ユニットを駆動する第1軸駆動部と、前記鉛直方向および前記第1軸方向に直交する第2軸方向に前記第1軸駆動部を駆動する第2軸駆動部とで構成された請求項1記載のマーク認識システム。
- 前記第1軸駆動部は、前記第1軸方向に延びる第1ねじ軸と、前記第1ねじ軸に螺合するとともに前記ユニットに取り付けられたナットとを有し、前記第2軸駆動部は、前記第2軸方向に伸びる第2ねじ軸と、前記第2ねじ軸に螺合するとともに前記第1軸駆動部に取り付けられたナットとを有する請求項2記載のマーク認識システム。
- 前記複数の較正用マークのうち少なくとも2つの較正用マークそれぞれの位置は、前記第1軸方向と前記第2軸方向のいずれにおいても互いに異なる請求項2または3に記載のマーク認識システム。
- 3個以上の前記較正用マークが設けられている請求項2ないし4のいずれか一項に記載のマーク認識システム。
- 前記基板上マークはフィデューシャルマークである請求項1ないし5のいずれか一項に記載のマーク認識システム。
- 請求項1ないし6のいずれか一項に記載のマーク認識システムを備えた表面実装機であって、前記基台上に搬送された前記基板に対して部品を実装することを特徴とする表面実装機。
- 基台の鉛直方向上側で複数のカメラを保持するユニットを駆動機構により前記鉛直方向に直交する方向に駆動することで、前記基板に付された基板上マークを認識可能な位置に前記複数のカメラの相対位置関係を保持したまま前記カメラを移動させて、前記基板上マークを前記カメラにより認識するマーク認識方法であって、
前記複数のカメラのうちの一のカメラを、前記基台に設けられた複数の較正用マークそれぞれの認識可能位置に移動させることで得られる前記複数の較正用マークの認識結果を用いて前記駆動機構の熱変形に関する熱変形情報を求め、
前記熱変形情報に基づき前記ユニットの駆動を較正することによって前記基台上の基板に付された基板上マークを認識可能な位置に前記一のカメラを移動させて前記基板上マークを認識し、
前記複数のカメラの相対位置関係に関する相対位置情報と前記熱変形情報とに基づき前記ユニットの駆動を較正することによって前記基板上マークを認識可能な位置に前記一のカメラ以外のカメラを移動させて前記基板上マークを認識することを特徴とするマーク認識方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008146509A JP4648964B2 (ja) | 2008-06-04 | 2008-06-04 | マーク認識システム、マーク認識方法および表面実装機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008146509A JP4648964B2 (ja) | 2008-06-04 | 2008-06-04 | マーク認識システム、マーク認識方法および表面実装機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009295709A true JP2009295709A (ja) | 2009-12-17 |
| JP4648964B2 JP4648964B2 (ja) | 2011-03-09 |
Family
ID=41543652
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008146509A Active JP4648964B2 (ja) | 2008-06-04 | 2008-06-04 | マーク認識システム、マーク認識方法および表面実装機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4648964B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236374A (ja) * | 2011-05-13 | 2012-12-06 | Yamaha Motor Co Ltd | 印刷装置 |
| JP2013239517A (ja) * | 2012-05-14 | 2013-11-28 | Yamaha Motor Co Ltd | 部品または基板の作業装置および部品実装装置 |
| WO2017130267A1 (ja) * | 2016-01-25 | 2017-08-03 | 富士機械製造株式会社 | 部品実装装置 |
| JP2017168619A (ja) * | 2016-03-16 | 2017-09-21 | ヤマハ発動機株式会社 | 部品搭載方法および部品実装装置 |
| JP2018032681A (ja) * | 2016-08-23 | 2018-03-01 | ヤマハ発動機株式会社 | 部品実装機、基準マーク撮像方法 |
| JP2024043211A (ja) * | 2022-09-16 | 2024-03-29 | 株式会社Fuji | 補正装置及び補正方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105309064B (zh) * | 2014-05-28 | 2018-01-12 | 雅马哈发动机株式会社 | 元件安装装置和元件安装方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006041260A (ja) * | 2004-07-28 | 2006-02-09 | Juki Corp | 電子部品搭載装置のノズル位置補正方法 |
| JP2007235019A (ja) * | 2006-03-03 | 2007-09-13 | Matsushita Electric Ind Co Ltd | 電子部品の位置認識方法および電子部品実装装置 |
-
2008
- 2008-06-04 JP JP2008146509A patent/JP4648964B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006041260A (ja) * | 2004-07-28 | 2006-02-09 | Juki Corp | 電子部品搭載装置のノズル位置補正方法 |
| JP2007235019A (ja) * | 2006-03-03 | 2007-09-13 | Matsushita Electric Ind Co Ltd | 電子部品の位置認識方法および電子部品実装装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236374A (ja) * | 2011-05-13 | 2012-12-06 | Yamaha Motor Co Ltd | 印刷装置 |
| JP2013239517A (ja) * | 2012-05-14 | 2013-11-28 | Yamaha Motor Co Ltd | 部品または基板の作業装置および部品実装装置 |
| WO2017130267A1 (ja) * | 2016-01-25 | 2017-08-03 | 富士機械製造株式会社 | 部品実装装置 |
| JPWO2017130267A1 (ja) * | 2016-01-25 | 2018-11-15 | 株式会社Fuji | 部品実装装置 |
| US11083121B2 (en) | 2016-01-25 | 2021-08-03 | Fuji Corporation | Component mounting apparatus |
| JP2017168619A (ja) * | 2016-03-16 | 2017-09-21 | ヤマハ発動機株式会社 | 部品搭載方法および部品実装装置 |
| JP2018032681A (ja) * | 2016-08-23 | 2018-03-01 | ヤマハ発動機株式会社 | 部品実装機、基準マーク撮像方法 |
| JP2024043211A (ja) * | 2022-09-16 | 2024-03-29 | 株式会社Fuji | 補正装置及び補正方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4648964B2 (ja) | 2011-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4648964B2 (ja) | マーク認識システム、マーク認識方法および表面実装機 | |
| KR100338909B1 (ko) | 전자부품의 실장 방법 | |
| KR101051106B1 (ko) | 전자부품 실장장치 및 전자부품 실장방법 | |
| JP3744251B2 (ja) | 電子部品実装方法 | |
| JP4416899B2 (ja) | 部品の実装位置補正方法および表面実装機 | |
| JP4828298B2 (ja) | 部品実装方法および部品実装装置 | |
| WO2014174598A1 (ja) | 部品実装装置、実装ヘッド、および制御装置 | |
| WO2015029209A1 (ja) | 部品実装装置、その制御方法および部品実装装置用プログラム | |
| EP2059112B1 (en) | Electronic component taking out apparatus, surface mounting apparatus and method for taking out electronic component | |
| JP2009170465A (ja) | 電子部品の実装方法、及び表面実装機 | |
| JP5999544B2 (ja) | 実装装置、実装位置の補正方法、プログラム及び基板の製造方法 | |
| JP4307036B2 (ja) | 電子部品実装装置における吸着ノズルの位置補正方法 | |
| JP2009212251A (ja) | 部品移載装置 | |
| JP6446282B2 (ja) | 部品実装装置、及び部品実装方法 | |
| JP4927776B2 (ja) | 部品実装方法 | |
| JP4657834B2 (ja) | 部品実装方法および表面実装機 | |
| JP2017092273A (ja) | 部品実装装置および部品実装方法 | |
| JP5254875B2 (ja) | 実装機 | |
| JP4810586B2 (ja) | 実装機 | |
| JP5047772B2 (ja) | 実装基板製造方法 | |
| JP4781945B2 (ja) | 基板処理方法および部品実装システム | |
| CN108432361B (zh) | 安装头的移动误差检测装置及元件安装装置 | |
| JP3142720B2 (ja) | 実装機の位置補正方法及びその装置 | |
| JP3564191B2 (ja) | 実装機の位置補正方法及びその装置 | |
| JP4091950B2 (ja) | 部品の実装位置補正方法および表面実装機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101026 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20101026 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20101201 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101210 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131217 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4648964 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |