JP2012122567A - 無段変速機 - Google Patents
無段変速機 Download PDFInfo
- Publication number
- JP2012122567A JP2012122567A JP2010274985A JP2010274985A JP2012122567A JP 2012122567 A JP2012122567 A JP 2012122567A JP 2010274985 A JP2010274985 A JP 2010274985A JP 2010274985 A JP2010274985 A JP 2010274985A JP 2012122567 A JP2012122567 A JP 2012122567A
- Authority
- JP
- Japan
- Prior art keywords
- axial force
- torque
- continuously variable
- force
- variable transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


















Landscapes
- Friction Gearing (AREA)
Abstract
【課題】トルク伝達効率を向上させること。
【解決手段】シャフト60上に配置した第1回転部材10、第2回転部材20及びサンローラ30及びキャリア40と、第1及び第2の回転部材10,20に挟持される放射状に配置した複数の遊星ボール50と、この遊星ボール50と同じ第2回転中心軸を有し、この遊星ボール50から両端を突出させた支持軸51と、入力トルクを軸力に変換して第1回転部材10に伝え、その軸力で第1回転部材10を各遊星ボール50に押し付ける第1トルク軸力変換機構と、キャリア40とシャフト60との間に配設され、変速比が増速側のときにはキャリア40の回転トルクを前記軸力とは逆向きの軸力に変換して当該キャリア40に発生させ、変速比が減速側のときにはキャリア40の回転トルクを第1トルク軸力変換機構の軸力と同じ向きの軸力に変換して当該キャリア40に発生させる第2トルク軸力変換機構と、を備えること。
【選択図】図1
【解決手段】シャフト60上に配置した第1回転部材10、第2回転部材20及びサンローラ30及びキャリア40と、第1及び第2の回転部材10,20に挟持される放射状に配置した複数の遊星ボール50と、この遊星ボール50と同じ第2回転中心軸を有し、この遊星ボール50から両端を突出させた支持軸51と、入力トルクを軸力に変換して第1回転部材10に伝え、その軸力で第1回転部材10を各遊星ボール50に押し付ける第1トルク軸力変換機構と、キャリア40とシャフト60との間に配設され、変速比が増速側のときにはキャリア40の回転トルクを前記軸力とは逆向きの軸力に変換して当該キャリア40に発生させ、変速比が減速側のときにはキャリア40の回転トルクを第1トルク軸力変換機構の軸力と同じ向きの軸力に変換して当該キャリア40に発生させる第2トルク軸力変換機構と、を備えること。
【選択図】図1
Description
本発明は、共通の回転軸を有する入力側の回転要素及び出力側の回転要素と、その回転軸に対して放射状に複数配置した転動部材と、を備え、その各回転要素に挟持された転動部材を傾転させることによって入出力間の変速比を無段階に変化させる無段変速機に関する。
従来、この種の無段変速機、つまり、回転軸としてのシャフトと、このシャフトの中心軸を第1回転中心軸とする相対回転可能な複数の回転要素と、その第1回転中心軸と平行な別の第2回転中心軸を有し、第1回転中心軸を中心にして放射状に複数配置した転動部材と、を備え、対向させて配置した入力側の第1回転要素と出力側の第2回転要素とで各転動部材を挟持すると共に、各転動部材を第3回転要素の外周面上に配置し、その転動部材を傾転させることで変速比を無段階に変化させる所謂トラクション遊星ギヤ機構の無段変速機が知られている。この無段変速機においては、各転動部材を夫々の回転軸を介して保持する第4回転要素も備えており、転動部材の傾転時に自身の回転軸の夫々の端部が第4回転要素における入力側のガイド溝と出力側のガイド溝に沿って案内される。例えば、下記の特許文献1−3には、この種の無段変速機について開示されている。特許文献1の無段変速機においては、入力側にトルクカムを設け、回転トルクが変換された軸力によって第1回転要素と第2回転要素を夫々の転動部材に押し付けている。また、特許文献2の無段変速機においては、出力側にもトルクカムが設けられており、2つのトルクカムで発生させた軸力によって第1回転要素と第2回転要素を夫々の転動部材に押し付けている。尚、特許文献3には、出力ディスクとして機能するハブシェルを固定支持スリーブに対して相対回転させる為に、そのハブシェルの径方向内側と固定支持スリーブの外周面との間に固定支持ベアリングを介在させた無段変速機が記載されている。
この種の無段変速機は、トルクカムの軸力により第1回転要素と各転動部材との間(入力側)や第2回転要素と各転動部材との間(出力側)に法線力を発生させ、その間に発生した摩擦力(トラクション力)によってトルクを伝達する。その法線力は、入力側と出力側とで同じ大きさになる。また、そのトルクの伝達に必要な必要法線力は、変速比が1のときに入力側と出力側とで同じ大きさになる。ここで、入力側のみにトルクカムが設けられた無段変速機においては、変速比に拘わらず、一定の大きさの法線力が入力側と出力側とで発生する。しかしながら、この無段変速機においては、変速比に拘わらず入力側の必要法線力が一定の大きさである一方、変速比の値が大きいほど出力側の必要法線力が大きくなる(図2)。従って、この無段変速機では、最減速時における出力側の必要法線力の最大値に合わせて入力側と出力側の法線力を発生させなければならず、最減速時以外の変速比において、入力側と出力側の法線力が必要法線力に対して過剰になり、トルク伝達効率を悪化させてしまう可能性がある。また、入力側と出力側の双方にトルクカムが設けられた無段変速機においては、変速比が増速側のときに一定の大きさの法線力を発生させ、減速側のときに変速比の値が大きいほど大きな法線力を発生させる(図17)。従って、この無段変速機では、増速時の入力側の法線力を必要法線力に一致させたとしても、そのときの出力側の法線力が必要法線力に対して過剰になる。更に、減速時においては、出力側の法線力を必要法線力に一致させたとしても、入力側の法線力が必要法線力に対して過剰になる。故に、この無段変速機においても、トルク伝達効率を悪化させてしまう可能性がある。
そこで、本発明は、かかる従来例の有する不都合を改善し、トルク伝達効率を向上させることのできる無段変速機を提供することを、その目的とする。
上記目的を達成する為、本発明は、回転中心となる変速機軸と、前記変速機軸上で対向させて配置した共通の第1回転中心軸を有する相対回転可能な第1及び第2の回転要素と、前記第1回転中心軸と平行な第2回転中心軸を有し、該第1回転中心軸を中心にして放射状に複数配置して前記第1及び第2の回転要素に挟持させた転動部材と、前記第1回転要素と前記各転動部材との夫々の接触点及び前記第2回転要素と前記各転動部材との夫々の接触点を当該各転動部材の傾転動作によって変えることで、変速比となる当該各回転要素の間の回転比を変化させる変速装置と、前記各転動部材を外周面上に配置し、前記変速機軸並びに前記第1及び第2の回転要素に対する相対回転が可能な第3回転要素と、前記第2回転中心軸を有し、前記転動部材から両端を突出させた当該転動部材の支持軸と、前記変速機軸上に配置され、前記各支持軸の夫々の端部を前記各転動部材の傾転動作が可能な状態で保持する第4回転要素と、を備えた無段変速機において、入力トルクを軸力に変換して前記第1回転要素に伝え、該軸力で前記第1回転要素を前記各転動部材に押し付ける第1トルク軸力変換機構と、前記第4回転要素と前記変速機軸との間に配設され、変速比が増速側のときには前記第4回転要素の回転トルクを前記第1トルク軸力変換機構の軸力とは逆向きの軸力に変換して当該第4回転要素に発生させ、変速比が減速側のときには前記第4回転要素の回転トルクを前記第1トルク軸力変換機構の軸力と同じ向きの軸力に変換して当該第4回転要素に発生させる第2トルク軸力変換機構と、を設けたことを特徴としている。
ここで、回転トルクを軸力に変換して前記第2回転要素に伝え、該軸力で前記第2回転要素を前記各転動部材に押し付けるトルク軸力変換機構を新たに設けてもよい。
本発明に係る無段変速機に依れば、転動部材における入力側(第1回転要素側)の接触部においては、第1トルク軸力変換機構の軸力が作用する。これに対して、出力側(第2回転要素側)の接触部においては、変速比が1よりも小さい増速時であれば、第1トルク軸力変換機構の軸力を第2トルク軸力変換機構の軸力分だけ減少させた力が作用し、減速時であれば、第1トルク軸力変換機構の軸力に第2トルク軸力変換機構の軸力分だけ増加させた力が作用する。従って、この無段変速機は、第1トルク軸力変換機構だけで軸力を発生させる場合と比べて、増速時における出力側の法線力の減少が可能になるので、必要法線力に対する過剰分を減少させることができる。また、これにより、入力側の法線力を出力側の必要法線力の最大値に合わせる必要が無くなるので、入力側の法線力の必要法線力に対する過剰分についても減少させることができる。特に、その入力側の法線力の必要法線力に近づけることで、減速時における出力側の法線力についても減少させることができ、必要法線力に対する過剰分の減少が可能になる。故に、この無段変速機は、法線力の減少に伴いトルク伝達効率を向上させることができる。更に、この無段変速機は、出力側にも新たにトルク軸力変換機構を設けることで、転動部材における入力側の接触部において、増速時に第1トルク軸力変換機構と新たなトルク軸力変換機構による軸力が作用し、減速時にその軸力を第2トルク軸力変換機構の軸力分だけ減少させた力が作用する。また、出力側の接触部においては、増速時に第1トルク軸力変換機構と新たなトルク軸力変換機構による軸力を第2トルク軸力変換機構の軸力分だけ減少させた力が作用し、減速時に第1トルク軸力変換機構と新たなトルク軸力変換機構による軸力が作用する。従って、この無段変速機は、第1トルク軸力変換機構と新たなトルク軸力変換機構だけで軸力を発生させる場合と比べて、増速時における出力側の法線力と減速時における入力側の法線力の減少が可能になるので、これらの必要法線力に対する過剰分が減少し、トルク伝達効率を向上させることができる。
以下に、本発明に係る無段変速機の実施例を図面に基づいて詳細に説明する。尚、この実施例によりこの発明が限定されるものではない。
[実施例1]
本発明に係る無段変速機の実施例1を図1から図15に基づいて説明する。
本発明に係る無段変速機の実施例1を図1から図15に基づいて説明する。
最初に、本実施例の無段変速機の一例について図1を用いて説明する。図1の符号1は、本実施例の無段変速機を示す。
この無段変速機1の主要部を成す無段変速機構は、共通の第1回転中心軸R1を有する相互間での相対回転が可能な第1から第4の回転要素10,20,30,40と、その第1回転中心軸R1と後述する基準位置において平行な別の第2回転中心軸R2を各々有する複数の転動部材50と、第1から第4の回転要素10,20,30,40の回転中心に配置した変速機回転軸としてのシャフト60と、を備えた所謂トラクション遊星ギヤ機構と云われるものである。この無段変速機1は、第2回転中心軸R2を第1回転中心軸R1に対して傾斜させ、転動部材50を傾転させることによって、入出力間の変速比を変えるものである。以下においては、特に言及しない限り、その第1回転中心軸R1や第2回転中心軸R2に沿う方向を軸線方向と云い、その第1回転中心軸R1周りの方向を周方向と云う。また、その第1回転中心軸R1に直交する方向を径方向と云い、その中でも、内方に向けた側を径方向内側と、外方に向けた側を径方向外側と云う。この無段変速機1においては、第1から第4の回転要素10,20,30,40の内の何れか1つを周方向へと回転させぬよう固定し、その内の残りが周方向に回転できるようになっている。この例示では、第4回転要素40が固定対象になっている。
この無段変速機1においては、第1回転要素10と第2回転要素20と第3回転要素30と第4回転要素40との間で各転動部材50を介したトルクの伝達が行われる。例えば、この無段変速機1においては、第1から第4の回転要素10,20,30,40の内の1つがトルク(動力)の入力部となり、残りの回転要素の内の少なくとも1つがトルクの出力部となる。これが為、この無段変速機1においては、入力部となる何れかの回転要素と出力部となる何れかの回転要素との間の回転速度(回転数)の比が変速比となる。例えば、この無段変速機1は、車両の動力伝達経路上に配設される。その際には、その入力部がエンジンやモータ等の動力源側に連結され、その出力部が駆動輪側に連結される。この無段変速機1においては、入力部としての回転要素にトルクが入力された場合の各回転要素の回転動作を正駆動と云い、出力部としての回転要素に正駆動時とは逆方向のトルクが入力された場合の各回転要素の回転動作を逆駆動と云う。例えば、この無段変速機1は、先の車両の例示に従えば、加速等の様に動力源側からトルクが入力部たる回転要素に入力されて当該回転要素を回転させているときが正駆動となり、減速等の様に駆動輪側から出力部たる回転中の回転要素に正駆動時とは逆方向のトルクが入力されているときが逆駆動となる。
この無段変速機1においては、変速機軸としてのシャフト60の中心軸(第1回転中心軸R1)を中心にして放射状に複数個の転動部材50を配置する。その夫々の転動部材50は、対向させて配置した第1回転要素10と第2回転要素20とで挟持させると共に、第3回転要素30の外周面上に配設する。また、夫々の転動部材50は、自身の回転中心軸(第2回転中心軸R2)を中心にした自転を行う。更に、転動部材50は、第4回転要素40が第1回転中心軸R1を中心にして回転する場合、その第4回転要素40と一緒に回転して、第1回転中心軸R1を中心にした公転を行う。この無段変速機1は、第1及び第2の回転要素10,20の内の少なくとも一方を転動部材50に押し付けることによって、第1から第4の回転要素10,20,30,40と転動部材50との間に適切な摩擦力(トラクション力)を発生させ、その間におけるトルクの伝達を可能にする。また、この無段変速機1は、夫々の転動部材50を自身の第2回転中心軸R2と第1回転中心軸R1とを含む傾転平面上で傾転させ、第1回転要素10と第2回転要素20との間の回転速度(回転数)の比を変化させることによって、入出力間の回転速度(回転数)の比を変える。
ここで、この無段変速機1においては、第1及び第2の回転要素10,20が遊星ギヤ機構で云うところのリングギヤの機能を為すものとなる。また、第3回転要素30はトラクション遊星ギヤ機構のサンローラとして機能し、第4回転要素40はキャリアとして機能する。また、転動部材50は、トラクション遊星ギヤ機構におけるボール型ピニオンとして機能する。以下、第1及び第2の回転要素10,20については、各々「第1及び第2の回転部材10,20」と云う。また、第3回転要素30については「サンローラ30」と云い、第4回転要素40については「キャリア40」と云う。また、転動部材50については、「遊星ボール50」と云う。
第1及び第2の回転部材10,20は、中心軸を第1回転中心軸R1に一致させた円盤部材(ディスク)や円環部材(リング)であり、軸線方向で対向させて各遊星ボール50を挟み込むように配設する。この例示においては、双方とも円環部材とする。
この第1及び第2の回転部材10,20は、後で詳述する各遊星ボール50の径方向外側の外周曲面と接触する接触面を有している。その夫々の接触面は、例えば、遊星ボール50の外周曲面の曲率と同等の曲率の凹円弧面、その外周曲面の曲率とは異なる曲率の凹円弧面、凸円弧面又は平面等の形状を成している。ここでは、後述する基準位置の状態で第1回転中心軸R1から各遊星ボール50との接触部分までの距離が同じ長さになるように夫々の接触面を形成して、第1及び第2の回転部材10,20の各遊星ボール50に対する夫々の接触角θが同じ角度になるようにしている。その接触角θとは、基準から各遊星ボール50との接触部分までの角度のことである。ここでは、径方向を基準にしている。その夫々の接触面は、遊星ボール50の外周曲面に対して点接触又は面接触している。また、夫々の接触面は、第1及び第2の回転部材10,20から遊星ボール50に向けて軸線方向の力が加わった際に、その遊星ボール50に対して径方向内側で且つ斜め方向の力(法線力Fn)が加わるように形成されている。
この例示においては、第1回転部材10を無段変速機1の正駆動時におけるトルク入力部として作用させ、第2回転部材20を無段変速機1の正駆動時におけるトルク出力部として作用させる。従って、その第1回転部材10には入力軸11が連結され、第2回転部材20には出力軸21が連結される。
その入力軸11は、中心軸を第1回転中心軸R1に一致させた円盤部11aと円筒部11bとを備えている。第1回転部材10は、その円盤部11aの外周側で後述するトルクカム12を介して連結される。一方、その円盤部11aの内周側には、円筒部11bが設けられている。その円筒部11bの内周面は、ラジアル軸受RB1,RB2を介してシャフト60の外周面に取り付けられている。従って、入力軸11は、そのシャフト60に対する周方向の相対回転を行うことができる。
また、出力軸21は、中心軸を第1回転中心軸R1に一致させた環状部21aと第1円筒部21bと円盤部21cと第2円筒部21dとを備えている。第2回転部材20は、その環状部21aに固定され、出力軸11と共に一体になって回転する。その環状部21aの外周側には、第1円筒部21bが第1及び第2の回転部材10,20や入力軸11等を覆うように延設されている。第2円筒部21dは、入力軸11の円筒部11bを覆うように設けられている。円盤部21cは、その外周側が第1円筒部21bの延設端に配設され、その内周側が第2円筒部21dの端部に配設される。その第2円筒部21dの内周面は、ラジアル軸受RB3,RB4を介して入力軸11の円筒部11bの外周面に取り付けられている。更に、円盤部21cの外周側の平面と入力軸11における円盤部11aの外周側の平面との間には、スラスト軸受TB1が配設されている。従って、出力軸21は、入力軸11に対する周方向の相対回転を行うことができる。
この無段変速機1は、ケース71の内部に収められている。ケース71は、中心軸を第1回転中心軸R1に一致させた円筒部71aと円盤部71bと環状部71cとを備えている。その円筒部71aは、一端が閉塞されており、その閉塞部分でシャフト60に固定されている。円盤部71bは、その円筒部71aの開口を塞ぐものである。環状部71cは、円筒部71aの内周面から径方向内側に向けて延設されている。その円盤部71bの内周側は、ラジアル軸受RB5を介して出力軸21の第2円筒部21dの外周面に取り付けられている。また、この円盤部71bの外周側の平面と出力軸21における円盤部21cの外周側の平面との間には、スラスト軸受TB2が配設されている。更に、環状部71cの平面と出力軸21における環状部21aの平面及び第1円筒部21bの端面との間には、スラスト軸受TB3が配設されている。従って、出力軸21は、ケース71に対する周方向の相対回転を行うことができる。
尚、ここで例示するシャフト60は、そのケース71や図示しない車体等における無段変速機1の固定部に固定したものであり、その固定部に対して相対回転させぬよう構成した円柱状の固定軸とする。
サンローラ30は、中心軸を第1回転中心軸R1に一致させた円筒状のものであり、軸受(図示略)によってシャフト60に対する周方向への相対回転を行える。このサンローラ30の外周面には、複数個の遊星ボール50が放射状に略等間隔で配置される。従って、このサンローラ30においては、その外周面が遊星ボール50の自転の際の転動面となる。このサンローラ30は、自らの回転動作によって夫々の遊星ボール50を転動(自転)させることもできれば、夫々の遊星ボール50の転動動作(自転動作)に伴って回転することもできる。また、このサンローラ30は、シャフト60に対する軸線方向への相対移動ができないように、その軸線方向の両端を挟み込む例えばスナップリング等の固定部材(図示略)がシャフト60に取り付けられている。
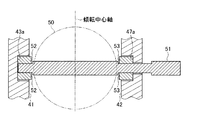
キャリア40は、夫々の遊星ボール50の傾転動作を妨げないように後述する支持軸51の夫々の端部を保持する。このキャリア40は、例えば、中心軸を第1回転中心軸R1に一致させた第1及び第2の円盤部41,42を対向させて配置し、その第1及び第2の円盤部41,42を複数本の連結軸(図示略)で連結して、全体として籠状となるようにしている。これにより、このキャリア40は、外周面に開放部分を有することになる。各遊星ボール50は、第1及び第2の円盤部41,42の間に配置し、その開放部分を介してキャリア40の外周面から径方向外側に一部分を突出させている。
遊星ボール50は、サンローラ30の外周面上を転がる転動部材である。この遊星ボール50は、完全な球状体であることが好ましいが、少なくとも転動方向にて球形を成すもの、例えばラグビーボールの様な断面が楕円形状のものであってもよい。この遊星ボール50は、その中心を通って貫通させた支持軸51によって回転自在に支持する。例えば、遊星ボール50は、支持軸51の外周面との間に配設した軸受(図示略)によって、第2回転中心軸R2を回転軸とした支持軸51に対する相対回転(つまり自転)ができるようにしている。従って、この遊星ボール50は、支持軸51を中心にしてサンローラ30の外周面上を転動することができる。その支持軸51の両端は、遊星ボール50から突出させておく。
その支持軸51の基準となる位置は、図1に示すように、第2回転中心軸R2が第1回転中心軸R1と平行になる位置である。この支持軸51は、その基準位置で形成される自身の回転中心軸(第2回転中心軸R2)と第1回転中心軸R1とを含む傾転平面内において、基準位置とそこから傾斜させた位置との間を遊星ボール50と共に揺動(傾転)することができる。その傾転は、その傾転平面内で遊星ボール50の中心を支点にして行われる。
この無段変速機1においては、夫々の遊星ボール50の傾転角が基準位置、即ち0度のときに、第1回転部材10と第2回転部材20とが同一回転速度(同一回転数)で回転する。つまり、このときには、第1回転部材10と第2回転部材20の回転比(回転速度又は回転数の比)が1となり、変速比γが1になっている。一方、夫々の遊星ボール50を基準位置から傾転させた際には、支持軸51の中心軸から第1回転部材10との接触部分までの距離が変化すると共に、支持軸51の中心軸から第2回転部材20との接触部分までの距離が変化する。これが為、第1回転部材10又は第2回転部材20の内の何れか一方が基準位置のときよりも高速で回転し、他方が低速で回転するようになる。例えば第2回転部材20は、遊星ボール50を一方へと傾転させたときに第1回転部材10よりも低回転になり(減速)、他方へと傾転させたときに第1回転部材10よりも高回転になる(増速)。従って、この無段変速機1においては、その傾転角を変えることによって、第1回転部材10と第2回転部材20との間の回転比(変速比γ)を無段階に変化させることができる。尚、ここでの増速時(γ<1)には、図1における上側の遊星ボール50を紙面時計回り方向に傾転させ且つ下側の遊星ボール50を紙面反時計回り方向に傾転させる。また、減速時(γ>1)には、図1における上側の遊星ボール50を紙面反時計回り方向に傾転させ且つ下側の遊星ボール50を紙面時計回り方向に傾転させる。
この無段変速機1には、その変速比γを変える変速装置81が設けられている。変速比γは遊星ボール50の傾転角φの変化に伴い変わるので、その変速装置81としては、夫々の遊星ボール50を傾転させる傾転装置を用いる。この変速装置81には、この技術分野において周知のものを利用する。例えば、変速装置81としては、延設された支持軸51の一方の端部に取り付けられた長手方向が径方向の支持部材と、この支持部材に径方向の力を加えるアクチュエータと、で構成されたものが考えられる。この変速装置81は、その支持部材を径方向へと動かすことにより、支持軸51を介して遊星ボール50を傾転させる。
この無段変速機1には、その変速装置81による夫々の遊星ボール50の傾転時に支持軸51を傾転方向へと案内する為のガイド部が設けられている。この例示では、そのガイド部をキャリア40に設ける。ガイド部は、遊星ボール50から突出させた支持軸51を傾転方向に向けて案内する径方向のガイド溝43,44であり、第1及び第2の円盤部41,42の夫々の対向する部分に遊星ボール50毎に形成する。つまり、全てのガイド溝43と全てのガイド溝44は、軸線方向から観ると夫々に放射状を成している。ガイド溝43は、第1円盤部41の周方向を溝幅としたものであり、傾転時の支持軸51の端面の軌跡に沿った溝底43aを有している。尚、ここでは、傾転時の摩擦損失を抑える為に、その支持軸51の端面と溝底43aとの間に隙間を設けている。また、この無段変速機1においては、変速装置81を第2円盤部42とケース71との間に配設しているので、支持軸51が第2円盤部42を貫通する必要がある。これが為、ガイド溝44は、第2円盤部42の周方向を溝幅、径方向を溝深さとする。
この無段変速機1においては、第1回転部材10の回転に伴い第1回転部材10と夫々の遊星ボール50との間に摩擦力(トラクション力)が発生し、夫々の遊星ボール50が自転を始める。そして、この無段変速機1においては、その夫々の遊星ボール50の回転によって、各遊星ボール50と第2回転部材20との間、各遊星ボール50とサンローラ30との間にも摩擦力が発生し、その第2回転部材20とサンローラ30も回転を始める。
また、この無段変速機1においては、第2回転部材20の回転に伴い第2回転部材20と夫々の遊星ボール50との間に摩擦力が発生し、夫々の遊星ボール50が自転を始める。そして、この無段変速機1においては、その夫々の遊星ボール50の回転によって、各遊星ボール50と第1回転部材10との間、各遊星ボール50とサンローラ30との間にも摩擦力が発生し、その第1回転部材10とサンローラ30も回転を始める。
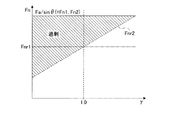
この無段変速機1においては、その夫々の摩擦力の大きさの適正化を図ることによって効率の良い回転トルクの伝達が可能になる。そして、その効率の良いトルク伝達が可能な摩擦力とは、各遊星ボール50における第1回転部材10、第2回転部材20及びサンローラ30からの法線力Fn1,Fn2,Fn3で決まる。この無段変速機1は、その法線力Fn1,Fn2,Fn3が過大であった場合、トルク伝達効率が悪化する。一方、トルクが不足していた場合、摩擦力不足によりトルク伝達が行えなくなる可能性がある。これが為、この無段変速機1では、そのような摩擦力を発生させる法線力Fn1,Fn2,Fn3が必要法線力Fnr1,Fnr2,Fnr3として定められている。この無段変速機1においては、入力側となる第1回転部材10からの必要法線力Fnr1が変速比γに拘わらず一定になる(図2)。一方、出力側となる第2回転部材20からの必要法線力Fnr2は、変速比γ=1を境にして、増速側で変速比γの数値が小さくなるほど必要法線力Fnr1よりも小さく、減速側で変速比γの数値が大きくなるほど必要法線力Fnr1よりも大きくなる(図2)。
この無段変速機1には、法線力Fn1,Fn2,Fn3の元となる力、つまり軸線方向の力(軸力)を発生させる軸力発生装置が設けられている。その軸力発生装置としては、第1回転部材10を夫々の遊星ボール50に対して押し付ける為の軸力Faを発生させるトルクカム機構(トルクカム12)が設けられている。そのトルクカム12は、回転トルクを軸力Faに変換するトルク軸力変換機構であり、第1回転部材10と入力軸11における円盤部11aの外周側の平面との間に配設する。このトルクカム12は、入力軸11の回転トルクを第1回転部材10に伝えると共に、夫々の軸線方向に向けた軸力Faを発生させる。また、このトルクカム12は、第1回転部材10の回転トルクを入力軸11に伝えると共に、夫々の軸線方向に向けた軸力Faを発生させるものでもある。スラスト軸受TB1は、入力軸11を挟んで径方向にてトルクカム12と同等の位置に配置されており、その内の一方の軸力Faを受け持つ。従って、他方の軸力Faは、軸線方向に向けた推力となり、第1回転部材10を介して夫々の遊星ボール50に加わる。以下、この他方の軸力Faのことを推力Faとも云う。
また、その推力Faは、夫々の遊星ボール50を介して第2回転部材20と出力軸21に伝わる。スラスト軸受TB3は、ケース71に取り付けられており、その推力Faを受け持つ。従って、夫々の遊星ボール50には、その第2回転部材20を介して推力Faと同様の反力Faが加わる。
このトルクカム12による法線力Fn1,Fn2は、軸力Faと接触角θにより決まり、「Fa/sinθ」となる。入力側(第1回転部材10と各遊星ボール50との間)においては、その法線力Fn1(=Fa/sinθ)が必要法線力Fnr1となるように軸力Fa、つまりトルクカム12の諸元を設定すれば、効率の良いトルク伝達が可能な摩擦力を発生させることができる。しかしながら、この入力側に合わせた設定では、出力側(第2回転部材20と各遊星ボール50との間)において、減速時に法線力Fn2(=Fa/sinθ)が必要法線力Fnr2に対して不足することになり、摩擦力不足によりトルク伝達が行えなくなる可能性がある。故に、この軸力発生装置のままでは、図2に示すように、必要法線力Fnr2の最大値に合わせてトルクカム12の諸元を設定しなければならず、最減速時以外の変速比γで過剰な法線力Fn1,Fn2が発生し、過剰な摩擦力によるトルク伝達効率の低下を招く虞がある。
そこで、この無段変速機1では、そのトルクカム12の他にも軸力発生装置を設ける。このもう1つの軸力発生装置は、増速時(γ<1)にトルクカム12による推力Faとは逆向きの軸力Ffを発生させると共に、減速時(γ>1)に推力Faと同じ向きの軸力Ffを発生させ、上記の基準位置(γ=1)で軸力Ffを発生させないように構成したものである。また、この軸力発生装置は、増速時には変速比γの値が小さいほど大きな軸力Ffを発生させ、減速時には変速比γの値が大きいほど大きな軸力Ffを発生させるように構成する。その軸力Ffは、全ての遊星ボール50に作用させる。
この無段変速機1においては、新たに設けた軸力発生装置についてもトルク軸力変換機構を備えるものとする。以下、先に例示したトルクカム12を第1トルク軸力変換機構とも云い、新たなトルク軸力変換機構を第2トルク軸力変換機構と云う。その第2トルク軸力変換機構は、キャリア40の第1円盤部41の内周面に形成した雌ネジ部45と、この雌ネジ部45に螺合させたシャフト60の外周面上の雄ネジ部61と、キャリア40の第2円盤部42の内周面に形成した雌ネジ部46と、この雌ネジ部46に螺合させたシャフト60の外周面上の雄ネジ部62と、を備える。
ここで、遊星ボール50においては、入力トルクが大きいほど第1回転部材10との接触部(以下、「入力側接触部」という。)における摩擦力(以下、「入力側摩擦力」という。)が大きくなる。その入力側摩擦力は、入力トルクが一定であれば、変速比γが変わろうとも同じ大きさになる。その入力トルクを一定にした場合、変速比γが1のときには、遊星ボール50における入力側摩擦力と第2回転部材20との接触部(以下、「出力側接触部」という。)の摩擦力(以下、「出力側摩擦力」という。)とが同じ大きさになる。これに対して、増速時(γ<1)の遊星ボール50においては、図3に示すように、入力側摩擦力に対して出力側摩擦力が小さくなり、変速比γの値が小さくなるほどその差が拡がる。一方、減速時(γ>1)の遊星ボール50においては、図4に示すように、入力側摩擦力に対して出力側摩擦力が大きくなり、変速比γの値が大きくなるほどその差が拡がる。
キャリア40には、その入力側摩擦力と出力側摩擦力との差分に応じた周方向のトルクが支持軸51を介して遊星ボール50毎に入力される。例えば、入力軸11側から軸線方向に観て、入力トルクにより第1回転部材10が反時計回りに回転する場合を例に挙げる。この場合、キャリア40には、増速時であれば反時計回りのトルクが作用し(図5)、減速時であれば時計回りのトルクが作用する(図6)。入力側摩擦力と出力側摩擦力との差は入力トルクと変速比γによって変わるので、増速時又は減速時にキャリア40に対して入力されるトルクは、その入力トルクと変速比γに応じて変化する。このトルクは、増速時には変速比γの値が小さいほど大きくなり、減速時には変速比γの値が大きいほど大きくなる。
キャリア40とシャフト60の間には第2トルク軸力変換機構が設けられているので、キャリア40は、入力されたトルクによって、シャフト60に対する相対回転と共に軸線方向へと移動することができる。この新たな軸力発生装置においては、その軸線方向への移動量が多いほど(つまり入力されたトルクが大きいほど)キャリア40には大きな軸力Ffが発生することになるので、その軸線に沿ったキャリア40の移動の方向と軸力Ffの方向とを一致させる。従って、雌ネジ部45,46と雄ネジ部61,62は、増速時にトルクカム12による推力Faとは逆向きへとキャリア40をシャフト60に対して相対移動させ、減速時にその推力Faと同じ向きへとキャリア40をシャフト60に対して相対移動させるよう螺刻形状を設定する。この軸力発生装置は、増速時であれば変速比γの値が小さいほど、減速時であれば変速比γの値が大きいほど、大きな軸力Ffを発生させる。
このキャリア40の回転量や軸線方向への移動量は、軸力Ffを遊星ボール50に伝達できるだけの量でよい。この無段変速機1においては、キャリア40が固定対象になっているので、このキャリア40の回転量を少量に抑えることが好ましい。従って、雌ネジ部45,46と雄ネジ部61,62は、可能な限り少しのキャリア40の回転量で軸力Ffを発生させることができるようにネジピッチ等の螺刻形状を設定することが好ましい。
この新たな軸力発生装置には、更に、キャリア40に発生した軸力Ffを遊星ボール50に伝える軸力伝達部52,53を設ける。ここでは、支持軸51に設けた円柱体又は円筒体を軸力伝達部52,53として用いる。その軸力伝達部52,53は、支持軸51における遊星ボール50から突出させた夫々の外周面上であり、且つ、その中心軸(第2回転中心軸R2)と遊星ボール50の傾転中心軸との交点から同じ距離だけ離した位置に各々配設する(図1,7)。ここで例示する軸力伝達部52,53は、支持軸51を挟んで1つずつ配設する。
第1円盤部41側の軸力伝達部52は、支持軸51の傾転動作と共にガイド溝43の円弧状の溝底43aに沿って外周面を接触させながら移動させる。これが為、この軸力伝達部52は、その外周面を溝底43aに当接させた状態で配置する。ここで、そのガイド溝43の溝幅は、2つの軸力伝達部52の厚さ分を考慮して設定する。そのガイド溝43の側壁と軸力伝達部52の円形又は環状の側面との間には、傾転時の摩擦損失を抑えるべく、隙間を設けることが好ましい。また、そのような摩擦損失を抑える為に、軸力伝達部52は、自身の中心軸を中心にして自転できるように円柱体又は円筒体のローラとして配設し、その外周面が溝底43aに沿って転動しながら傾転できるように構成することが好ましい。
一方、第2円盤部42には、その夫々のガイド溝43と対向する部分に当該ガイド溝43と同型状のガイド溝47を設ける。そのガイド溝47は、ガイド溝44と連通しており、そのガイド溝44により切り取られた部分を除き、ガイド溝43の溝底43aと同心円で且つ同一半径の円弧状の溝底47aを有する。軸力伝達部53は、支持軸51の傾転動作と共にその溝底47aに沿って外周面を接触させながら移動させる。これが為、この軸力伝達部53は、その外周面を溝底47aに当接させた状態で配置する。この軸力伝達部53についても、傾転時の摩擦損失を抑える為に、軸力伝達部52と同様の自転可能なローラにすることが好ましい。
図8に示す増速時には、キャリア40がシャフト60に対する回転と共に第1トルク軸力変換機構(トルクカム12)の軸力Faとは逆向きの軸線方向へと移動するので、溝底47aを介して軸力伝達部53が変速比γに応じた軸力Ffで押圧され、その軸力Ffが支持軸51を介して各遊星ボール50に伝わる。図9には、そのときの入力側接触部と出力側接触部の軸力Fs1,Fs2と、この軸力Fs1,Fs2により入力側接触部と出力側接触部とに発生する法線力Fn1,Fn2と、を示している。
入力側接触部における増速時の軸力Fs1は、トルクカム12による軸力Faそのものである(Fs1=Fa)。一方、出力側接触部における増速時の軸力Fs2は、その軸力Faから第2トルク軸力変換機構による軸力Ffを差し引いたものである(Fs2=Fa−Ff)。この無段変速機1においては、その入出力間の軸力差Ffがスラスト軸受TB1上に出てしまうが、その軸力差Ffに相当する反力をスラスト軸受TB2が受け持っている。
接触角が「θ」なので、図9に示すように、増速時には、入力側接触部の法線力Fn1と出力側接触部の法線力Fn2が下記のようになる。尚、その図9には、サンローラ30との接触部における法線力Fn3についても示している。
Fn1=Fa/sinθ
Fn2=(Fa−Ff)/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ−tanφ)/tanθtanφ}
Fn2=(Fa−Ff)/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ−tanφ)/tanθtanφ}
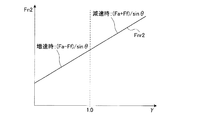
ここで、変速比γに拘わらず軸力Faは一定なので、法線力Fn1は、「Fa/sinθ」のまま一定である(図10)。これに対して、増速時の軸力Ffは変速比γの値が小さくなるほど大きくなるので、法線力Fn2は、変速比γの値が小さくなるにつれて軸力Ffの分だけ小さくなっていく(図11)。その図10,11は、法線力Fn1,Fn2の一例を示したものである。その図11では、法線力Fn2の傾斜角が必要法線力Fnr2の傾斜角と同じになるように(つまり法線力Fn2を必要法線力Fnr2に一致させるように)、変速比γに対する軸力Ffの大きさ、つまり雌ネジ部45,46と雄ネジ部61,62におけるネジピッチ等の螺刻形状を設定している。
また、図12に示す減速時には、キャリア40がシャフト60に対する増速時とは逆方向の回転と共に第1トルク軸力変換機構(トルクカム12)の軸力Faと同じ向きの軸線方向へと移動するので、溝底43aを介して軸力伝達部52が変速比γに応じた軸力Ffで押圧され、その軸力Ffが支持軸51を介して各遊星ボール50に伝わる。図13には、そのときの入力側接触部と出力側接触部の軸力Fs1,Fs2と、この軸力Fs1,Fs2により入力側接触部と出力側接触部とに発生する法線力Fn1,Fn2と、を示している。
入力側接触部における減速時の軸力Fs1は、トルクカム12による軸力Faそのものである(Fs1=Fa)。一方、出力側接触部における減速時の軸力Fs2は、その軸力Faに第2トルク軸力変換機構による軸力Ffを加えたものである(Fs2=Fa+Ff)。この無段変速機1においては、その入出力間の軸力差Ffがスラスト軸受TB1上に出てしまうが、その軸力差Ffに相当する反力をスラスト軸受TB3が受け持っている。
この減速時には、図13に示すように、入力側接触部の法線力Fn1と出力側接触部の法線力Fn2が下記のようになる。尚、その図13には、サンローラ30との接触部における法線力Fn3についても示している。
Fn1=Fa/sinθ
Fn2=(Fa+Ff)/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ+tanφ)/tanθtanφ}
Fn2=(Fa+Ff)/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ+tanφ)/tanθtanφ}
その法線力Fn1は、増速時と同様に「Fa/sinθ」のまま一定である(図10)。これに対して、軸力Ffは変速比γの値が大きくなるほど大きくなるので、法線力Fn2は、変速比γの値が大きくなるにつれて軸力Ffの分だけ大きくなっていく(図11)。
尚、変速比γが1のときには、入力側摩擦力と出力側摩擦力とに差が生じないので、キャリア40にトルクが入力されず、このキャリア40がシャフト60に対する相対回転を行わない。これが為、このときの法線力Fn1,Fn2は、「Fa/sinθ」となる。
ここでは、トルクカム12だけを軸力発生装置として有する場合との比較を容易にするべく、入力側接触部の法線力Fn1を図2に示す法線力Fn1と同じ大きさにしている(Fn1=Fa/sinθ)。その図2からも明らかなように、出力側接触部の法線力Fn2は、変速比γの値が小さくなればなるほど必要法線力Fnr2に対して過剰になっている。これに対して、第2トルク軸力変換機構を備えた軸力発生装置も設けることで、この無段変速機1は、図11に示すように、出力側接触部における増速時の法線力Fn2を入力側接触部の法線力Fn1(トルクカム12のみの場合の法線力Fn2)よりも減らすことができ、必要法線力Fnr2に対する過剰分も減らすことができる。従って、この無段変速機1は、増速時のトルク伝達効率を向上させることができる。尚、減速時においては、出力側接触部の法線力Fn2が入力側接触部の法線力Fn1(トルクカム12のみの場合の法線力Fn2)よりも増加し、必要法線力Fnr2に対する過剰分が増えてしまう。しかしながら、この無段変速機1は、出力側接触部の必要法線力Fnr2に対する法線力Fn2の過剰分を変速比γの全域に渡って同等の大きさにできるので、変速比γに応じたトルク伝達効率の変化(図2の場合には変速比γの値が小さくなるほどトルク伝達効率が悪化する)を抑えることができる。
ここで、この無段変速機1においては、入力側接触部の法線力Fn1(=Fa/sinθ)を必要法線力Fnr1に一致させる軸力Faとなるように、トルクカム12のカム角等の諸元を設定することが好ましい。これにより、法線力Fn1が必要法線力Fnr1と同じ大きさになるので(図14)、入力側接触部においては、最適なトルク伝達効率になる。そして、この無段変速機1においては、このトルクカム12の諸元の設定に加えて、上述した雌ネジ部45,46と雄ネジ部61,62の螺刻形状(法線力Fn2の傾斜角と必要法線力Fnr2の傾斜角とを一致させる螺刻形状)を採用することで、出力側接触部の法線力Fn2も必要法線力Fnr2に一致させることができ(図15)、出力側接触部も最適なトルク伝達効率になる。従って、この無段変速機1は、最も効率良くトルクを伝達することができる。
[実施例2]
次に、本発明に係る無段変速機の実施例2を図16から図22に基づいて説明する。
次に、本発明に係る無段変速機の実施例2を図16から図22に基づいて説明する。
図16の符号2は、本実施例2の無段変速機を示す。この無段変速機2は、実施例1の無段変速機1に対して、出力側(第2回転部材20側)にもトルクカム22を設けたものである。そのトルクカム22は、回転トルクをトルクカム12と同じ大きさの軸力Faに変換するトルク軸力変換機構であり、第2回転部材20と出力軸21における環状部21aの平面との間に配設する。このトルクカム22は、出力軸21の回転トルクを第2回転部材20に伝えると共に、夫々の軸線方向に向けた軸力Faを発生させる。また、このトルクカム22は、第2回転部材20の回転トルクを出力軸21に伝えると共に、夫々の軸線方向に向けた軸力Faを発生させるものでもある。その内の一方の軸力Faは、環状部21aとスラスト軸受TB3を介してケース71の環状部71cに受け止められる。従って、他方の軸力Faは、軸線方向に向けた推力となり、第2回転部材20を介して夫々の遊星ボール50に加わる。
2つのトルクカム12,22は、図17に示すように、変速比γ毎に同じ大きさの法線力Fn1,Fn2を発生させる。この図17では、増速側で入力側接触部の必要法線力Fnr1に法線力Fn1(=Fa/sinθ)を一致させるようにトルクカム12,22の諸元が設定されている。従って、増速側においては、出力側接触部の必要法線力Fnr2に対して法線力Fn2が過剰になる。また、この図17では、減速側で出力側接触部の必要法線力Fnr2に法線力Fn2(=Fa/sinθ)を一致させるようにトルクカム12,22の諸元が設定されている。従って、減速側においては、入力側接触部の必要法線力Fnr1に対して法線力Fn1が過剰になる。
ところが、この無段変速機2には、実施例1の無段変速機1と同様の第2トルク軸力変換機構(雌ネジ部45,46と雄ネジ部61,62)を備えた軸力発生装置が設けられている。従って、入力側接触部と出力側接触部においては、増速時や減速時の軸力Fs1,Fs2、そして法線力Fn1,Fn2,Fn3が次のようになる。
増速時には、実施例1の無段変速機1の増速時と同様の軸力Fs1,Fs2が発生する(Fs1=Fa、Fs2=Fa−Ff)。従って、増速時の法線力Fn1,Fn2,Fn3は、図9に示す実施例1の増速時の法線力Fn1,Fn2,Fn3と同じものになる。
Fn1=Fa/sinθ
Fn2=(Fa−Ff)/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ−tanφ)/tanθtanφ}
Fn2=(Fa−Ff)/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ−tanφ)/tanθtanφ}
この無段変速機2においては、その増速時の入出力間の軸力差Ffがスラスト軸受TB1上に出てしまうが、その軸力差Ffに相当する反力をスラスト軸受TB2が受け持っている。
一方、減速時には、図18に示すように、軸力Fs1,Fs2が増速時に対して入れ替わる。つまり、入力側接触部には、軸力Fs1(=Fa−Ff)が作用し、出力側接触部には、軸力Fs2(=Fa)が作用する。従って、減速時には、法線力Fn1,Fn2についても増速時に対して入れ替わる。尚、法線力Fn3については、増速時と同じである。
Fn1=(Fa−Ff)/sinθ
Fn2=Fa/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ−tanφ)/tanθtanφ}
Fn2=Fa/sinθ
Fn3=2Fa/tanθ+Ff{(tanθ−tanφ)/tanθtanφ}
この無段変速機2においては、その減速時の入出力間の軸力差Ffがスラスト軸受TB1上に出てしまうが、その軸力差Ffに相当する反力をスラスト軸受TB3が受け持っている。
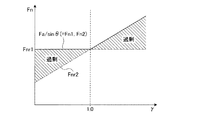
図19,20には、変速比γに対する入力側接触部の法線力Fn1と出力側接触部の法線力Fn2の一例を各々示している。
増速時の法線力Fn1は、2つのトルクカム12,22のみによる法線力Fn1と同じであり、必要法線力Fnr1に一致させている。これが為、増速時の入力側接触部においては、最適なトルク伝達効率になっている。一方、減速時の法線力Fn1は、変速比γの値が大きくなるほど軸力Ffが大きくなるので、変速比γの値が大きくなるにつれて軸力Ffの分だけ小さくなっていく。これにより、この減速時の法線力Fn1は、2つのトルクカム12,22のみによる法線力Fn1よりも小さくなり、必要法線力Fnr1に近づく。これが為、減速時の入力側接触部においては、必要法線力Fnr1に対する過剰分が減るので、トルク伝達効率を向上させることができる。
また、増速時の法線力Fn2は、変速比γの値が小さくなるほど軸力Ffが大きくなるので、変速比γの値が小さくなるにつれて軸力Ffの分だけ小さくなっていく。これにより、この増速時の法線力Fn2は、2つのトルクカム12,22のみによる法線力Fn2よりも小さくなり、必要法線力Fnr2に近づく。これが為、増速時の出力側接触部においては、必要法線力Fnr2に対する過剰分が減るので、トルク伝達効率を向上させることができる。一方、減速時の法線力Fn2は、2つのトルクカム12,22のみによる法線力Fn2と同じであり、必要法線力Fnr2に一致させている。これが為、減速時の出力側接触部においては、最適なトルク伝達効率になっている。
このように、この無段変速機2は、2つのトルクカム12,22だけを軸力発生装置として有する場合に比べて、トルク伝達効率を向上させることができる。
ここで、この無段変速機2においては、増速時の法線力Fn2を必要法線力Fnr2に一致させるように、そして減速時の法線力Fn1を必要法線力Fnr1に一致させるように、雌ネジ部45,46と雄ネジ部61,62におけるネジピッチ等の螺刻形状を設定することが好ましい。これにより、この無段変速機2は、全ての変速比γにおいて法線力Fn1,Fn2が必要法線力Fnr1,Fnr2に一致するので、入力側接触部と出力側接触部のトルク伝達効率が変速比γに拘わらず最適になり、最も効率良くトルクを伝達することができる。
ところで、上述した各実施例1,2の無段変速機1,2においては、増速時の入出力間の軸力差Ffに相当する反力がスラスト軸受TB2に入力される。そのスラスト軸受TB2は、第1回転部材10等と同等の外径を有しており、無段変速機1,2における径方向外側で反力Ffを受け持っている。従って、このスラスト軸受TB2においては、出力軸21側の係合部材とケース71側の係合部材との間における周方向の相対回転速度が高く、その間の摩擦損失が大きくなる虞がある。
そこで、図21に示す無段変速機3においては、そのスラスト軸受TB2に替えて、出力軸21とケース71の間にスラスト軸受TB4を配設する。この無段変速機3は、実施例2の無段変速機2において、スラスト軸受TB2をスラスト軸受TB4に置き換えたものである。そのスラスト軸受TB4は、言うなれば、スラスト軸受TB2の外径を小さくして、配置を径方向内側のシャフト60へと近づけたものである。スラスト軸受とは、外径が小さいほど、単位時間当りの移動距離が短くなるので(つまり係合部材間の相対回転速度が低くなるので)、摩擦損失が小さくなる。故に、この無段変速機3のスラスト軸受TB4は、実施例1,2のスラスト軸受TB2よりも摩擦損失が低減されている。従って、この無段変速機3は、実施例1,2の無段変速機1,2に対して、増速時のトルク伝達効率を向上させることができる。
ここで、この無段変速機3において入力軸11と出力軸21を夫々出力軸と入力軸として使用した場合、スラスト軸受TB4は、減速時の反力Ffを受け持つことになる。従って、この場合には、減速時のトルク伝達効率を向上させることができる。
ここでは2つのトルクカム12,22を有する無段変速機3を例に挙げたが、実施例1の無段変速機1においてスラスト軸受TB2をスラスト軸受TB4に置き換えたものであっても、その無段変速機3の場合と同様にトルク伝達効率を向上させることができる。
また、上述した各実施例1,2の無段変速機1,2、更に無段変速機3においては、キャリア40の第1円盤部41と第2円盤部42の双方に第2トルク軸力変換機構(雌ネジ部45,46と雄ネジ部61,62)を設けている。ここで、キャリア40は、第2トルク軸力変換機構を第1円盤部41と第2円盤部42の内の何れか一方に設けていれば、軸力伝達部52,53と支持軸51を介して増速時及び減速時に軸力Ffを遊星ボール50に作用させることができる。そこで、第2トルク軸力変換機構は、無段変速機1−3において、第1円盤部41と第2円盤部42の内の何れか一方に設けていればよい。
図22には、第1円盤部41にのみ第2トルク軸力変換機構(雌ネジ部45と雄ネジ部61)を設けた無段変速機4を例示している。その無段変速機4は、上記の無段変速機3において、第2円盤部42側の第2トルク軸力変換機構(雌ネジ部46と雄ネジ部62)を省いたものである。尚、その第2円盤部42は、シャフト60に対して相対回転できる。この無段変速機4の減速時には、前述した無段変速機1−3と同様に、第1円盤部41側の第2トルク軸力変換機構により軸力伝達部52を押圧可能な軸力Ffが発生する。一方、増速時には、その第1円盤部41側の第2トルク軸力変換機構が減速時とは逆方向の軸力Ffを発生させ、その軸力Ffが連結軸(図示略)を介して第2円盤部42に伝わる。これが為、この無段変速機4の増速時には、その第2円盤部42を介して軸力伝達部53に伝わり、その際の軸力Ffを各遊星ボール50に作用させることができる。
このように、第2トルク軸力変換機構が第1円盤部41と第2円盤部42の内の何れか一方だけに設けられていたとしても、その無段変速機は、ベースとする無段変速機1−3と同様に動作して、これらと同等の効果を得ることができる。更に、この無段変速機は、第2トルク軸力変換機構を1つ減らすことで、その無段変速機1−3に対して、ネジ加工費用を低減させることができ、且つ、組み付け作業性を向上させることができる。
以上のように、本発明に係る無段変速機は、トルク伝達効率を向上させる技術に有用である。
1,2,3,4 無段変速機
10 第1回転部材(第1回転要素)
12,22 トルクカム
20 第2回転部材(第2回転要素)
30 サンローラ(第3回転要素)
40 キャリア(第4回転要素)
41 第1円盤部
42 第2円盤部
43,44,47 ガイド溝
43a,47a 溝底
45,46 雌ネジ部
50 遊星ボール(転動部材)
51 支持軸
52,53 軸力伝達部
60 シャフト
61,62 雄ネジ部
71 ケース
81 変速装置
R1 第1回転中心軸
R2 第2回転中心軸
RB1,RB2,RB3,RB4,RB5 ラジアル軸受
TB1,TB2,TB3,TB4 スラスト軸受
10 第1回転部材(第1回転要素)
12,22 トルクカム
20 第2回転部材(第2回転要素)
30 サンローラ(第3回転要素)
40 キャリア(第4回転要素)
41 第1円盤部
42 第2円盤部
43,44,47 ガイド溝
43a,47a 溝底
45,46 雌ネジ部
50 遊星ボール(転動部材)
51 支持軸
52,53 軸力伝達部
60 シャフト
61,62 雄ネジ部
71 ケース
81 変速装置
R1 第1回転中心軸
R2 第2回転中心軸
RB1,RB2,RB3,RB4,RB5 ラジアル軸受
TB1,TB2,TB3,TB4 スラスト軸受
Claims (2)
- 回転中心となる変速機軸と、
前記変速機軸上で対向させて配置した共通の第1回転中心軸を有する相対回転可能な第1及び第2の回転要素と、
前記第1回転中心軸と平行な第2回転中心軸を有し、該第1回転中心軸を中心にして放射状に複数配置して前記第1及び第2の回転要素に挟持させた転動部材と、
前記第1回転要素と前記各転動部材との夫々の接触点及び前記第2回転要素と前記各転動部材との夫々の接触点を当該各転動部材の傾転動作によって変えることで、変速比となる当該各回転要素の間の回転比を変化させる変速装置と、
前記各転動部材を外周面上に配置し、前記変速機軸並びに前記第1及び第2の回転要素に対する相対回転が可能な第3回転要素と、
前記第2回転中心軸を有し、前記転動部材から両端を突出させた当該転動部材の支持軸と、
前記変速機軸上に配置され、前記各支持軸の夫々の端部を前記各転動部材の傾転動作が可能な状態で保持する第4回転要素と、
を備えた無段変速機において、
入力トルクを軸力に変換して前記第1回転要素に伝え、該軸力で前記第1回転要素を前記各転動部材に押し付ける第1トルク軸力変換機構と、
前記第4回転要素と前記変速機軸との間に配設され、変速比が増速側のときには前記第4回転要素の回転トルクを前記第1トルク軸力変換機構の軸力とは逆向きの軸力に変換して当該第4回転要素に発生させ、変速比が減速側のときには前記第4回転要素の回転トルクを前記第1トルク軸力変換機構の軸力と同じ向きの軸力に変換して当該第4回転要素に発生させる第2トルク軸力変換機構と、
を設けたことを特徴とする無段変速機。 - 回転トルクを軸力に変換して前記第2回転要素に伝え、該軸力で前記第2回転要素を前記各転動部材に押し付けるトルク軸力変換機構を新たに設けたことを特徴とする請求項1記載の無段変速機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010274985A JP2012122567A (ja) | 2010-12-09 | 2010-12-09 | 無段変速機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010274985A JP2012122567A (ja) | 2010-12-09 | 2010-12-09 | 無段変速機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012122567A true JP2012122567A (ja) | 2012-06-28 |
Family
ID=46504214
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010274985A Withdrawn JP2012122567A (ja) | 2010-12-09 | 2010-12-09 | 無段変速機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012122567A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016052044A1 (ja) * | 2014-09-30 | 2016-04-07 | 日本電産シンポ株式会社 | 摩擦式無段変速機 |
-
2010
- 2010-12-09 JP JP2010274985A patent/JP2012122567A/ja not_active Withdrawn
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016052044A1 (ja) * | 2014-09-30 | 2016-04-07 | 日本電産シンポ株式会社 | 摩擦式無段変速機 |
| JP2016070393A (ja) * | 2014-09-30 | 2016-05-09 | 日本電産シンポ株式会社 | 摩擦式無段変速機 |
| EP3203114A4 (en) * | 2014-09-30 | 2018-06-27 | Nidec Shimpo Corporation | Friction-type stepless transmission |
| US10145455B2 (en) | 2014-09-30 | 2018-12-04 | Nidec Shimpo Corporation | Friction-type continuously variable transmission |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5131353B2 (ja) | 無段変速機 | |
| US8382636B2 (en) | Continuously variable transmission | |
| JP5783260B2 (ja) | 無段変速機 | |
| JP5500118B2 (ja) | 無段変速機 | |
| AU2012370697B2 (en) | Continuously variable transmission | |
| US20140011629A1 (en) | Continuously variable transmission | |
| JP2012122568A (ja) | 無段変速機 | |
| JP2012107725A (ja) | 無段変速機 | |
| JP5903834B2 (ja) | 摩擦ローラ式減速機及び電気自動車用駆動装置 | |
| JP5803878B2 (ja) | 無段変速機 | |
| JP2012122567A (ja) | 無段変速機 | |
| JP2011190882A (ja) | 無段変速機 | |
| JP6773297B2 (ja) | 無段変速機および自転車 | |
| JP5488492B2 (ja) | 無段変速機 | |
| JP2014214838A (ja) | 無段変速機 | |
| JP7422939B2 (ja) | 変速機 | |
| JP2012127457A (ja) | 無段変速機 | |
| JP5761445B2 (ja) | 無段変速機 | |
| JP2011202701A (ja) | 無段変速機 | |
| JP2011202699A (ja) | 無段変速機 | |
| JP2005214373A (ja) | トロイダル型無段変速機 | |
| JP2013190019A (ja) | 無段変速機 | |
| JP2013167333A (ja) | 無段変速機 | |
| JP2014077467A (ja) | 無段変速機 | |
| JP2011190881A (ja) | 無段変速機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140304 |