JP2012166637A - 車両 - Google Patents
車両 Download PDFInfo
- Publication number
- JP2012166637A JP2012166637A JP2011028115A JP2011028115A JP2012166637A JP 2012166637 A JP2012166637 A JP 2012166637A JP 2011028115 A JP2011028115 A JP 2011028115A JP 2011028115 A JP2011028115 A JP 2011028115A JP 2012166637 A JP2012166637 A JP 2012166637A
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- vehicle body
- steering
- turn
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images














Landscapes
- Automatic Cycles, And Cycles In General (AREA)
- Steering Devices For Bicycles And Motorcycles (AREA)
Abstract
【課題】 安定して旋回すると共に、急操舵に対しても安定性が向上し、快適な乗り心地の車両を提供する。
【解決手段】 車体2と、車体2に回転可能に取り付けられた車輪4,5であって、車体2を操舵する操舵輪4と、操舵輪4を操舵するハンドル6と、車体2に回転可能に取り付けられた車輪であって、車体2を駆動する駆動輪5と、車体2に連結される支持部材22,23,24,25と、支持部材23,24,25に対して回転可能に連結されると共に、車体2を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動するアクチュエータ31と、ハンドル6に回生抵抗を与えるステアリングモータ71と、車体2の旋回時に旋回内側となる車輪5の接地点を中心として、車体2の旋回時に旋回外側となる車輪5の接地点にかかるアクチュエータ31の回転による鉛直方向の角加速度が、車体2の旋回時に旋回外側となる車輪5の接地点にかかる自重による鉛直方向の加速度を超えないように、ステアリングモータ71のモータトルクを制御する制御部100と、を有する。
【選択図】図14
【解決手段】 車体2と、車体2に回転可能に取り付けられた車輪4,5であって、車体2を操舵する操舵輪4と、操舵輪4を操舵するハンドル6と、車体2に回転可能に取り付けられた車輪であって、車体2を駆動する駆動輪5と、車体2に連結される支持部材22,23,24,25と、支持部材23,24,25に対して回転可能に連結されると共に、車体2を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動するアクチュエータ31と、ハンドル6に回生抵抗を与えるステアリングモータ71と、車体2の旋回時に旋回内側となる車輪5の接地点を中心として、車体2の旋回時に旋回外側となる車輪5の接地点にかかるアクチュエータ31の回転による鉛直方向の角加速度が、車体2の旋回時に旋回外側となる車輪5の接地点にかかる自重による鉛直方向の加速度を超えないように、ステアリングモータ71のモータトルクを制御する制御部100と、を有する。
【選択図】図14
Description
本発明は、少なくとも車体を傾斜させることで旋回を行う車両に関する。
従来、後二輪の三輪を有する車両において、車両の旋回時に車体を旋回方向の内側に傾斜させ、旋回性能を向上し、安定して旋回するものがあった。(特許文献1参照)。
しかしながら、特許文献1に記載された発明の構造では、ダブルウィッシュボーン式サスペンションを用いており、車輪の接地点が路面に追従して作用しているので、例えば急操舵に対して安定性が損なわれるおそれがあった。
本発明は、上記課題を解決するものであって、安定して旋回すると共に、急操舵に対しても安定性が向上し、快適な乗り心地の車両を提供することを目的とする。
そのために本発明は、車体と、前記車体に回転可能に取り付けられた車輪であって、車体を操舵する操舵輪と、前記操舵輪を操舵するハンドルと、前記車体に回転可能に取り付けられた車輪であって、車体を駆動する駆動輪と、前記車体に連結される支持部材と、前記支持部材に対して回転可能に連結されると共に、車体を旋回方向に傾斜させるリンク機構と、前記リンク機構を作動するアクチュエータと、前記ハンドルに回生抵抗を与えるステアリングモータと、前記車体の旋回時に旋回内側となる前記車輪の接地点を中心として、前記車体の旋回時に旋回外側となる前記車輪の接地点にかかる前記アクチュエータの回転による鉛直方向の角加速度が、前記車体の旋回時に旋回外側となる前記車輪の接地点にかかる自重による鉛直方向の加速度を超えないように、前記ステアリングモータのモータトルクを制御する制御部と、を有することを特徴とする。
また、前記制御部は、車体の旋回時に、旋回外側となる車輪の速度、旋回内側となる車輪の速度及び操舵角を検知して前記アクチュエータの角速度に対応したリンク角加速度予測値を演算するリンク角加速度予測値演算部を有することを特徴とする。
また、前記制御部は、前記リンク角加速度予測値演算部から送出されたリンク角加速度予測値に対応した前記ステアリングモータのモータトルクを算出し、モータトルク指令値を算出する操舵トルク演算部を有することを特徴とする。
請求項1記載の発明によれば、車体と、前記車体に回転可能に取り付けられた車輪であって、車体を操舵する操舵輪と、前記操舵輪を操舵するハンドルと、前記車体に回転可能に取り付けられた車輪であって、車体を駆動する駆動輪と、前記車体に連結される支持部材と、前記支持部材に対して回転可能に連結されると共に、車体を旋回方向に傾斜させるリンク機構と、前記リンク機構を作動するアクチュエータと、前記ハンドルに回生抵抗を与えるステアリングモータと、前記車体の旋回時に旋回内側となる前記車輪の接地点を中心として、前記車体の旋回時に旋回外側となる前記車輪の接地点にかかる前記アクチュエータの回転による鉛直方向の角加速度が、前記車体の旋回時に旋回外側となる前記車輪の接地点にかかる自重による鉛直方向の加速度を超えないように、前記ステアリングモータのモータトルクを制御する制御部と、を有するので、安定して旋回すると共に、急操舵に対しても安定性が向上し、快適な乗り心地の車両を提供することが可能となる。
また、請求項2記載の発明によれば、前記制御部は、車体の旋回時に、旋回外側となる車輪の速度、旋回内側となる車輪の速度及び操舵角を検知して前記アクチュエータの角速度に対応したリンク角加速度予測値を演算するリンク角加速度予測値演算部を有するので、より精密な制御ができ、さらに安定性を向上させることが可能となる。
また、請求項3記載の発明によれば、前記制御部は、前記リンク角加速度予測値演算部から送出されたリンク角加速度予測値に対応した前記ステアリングモータのモータトルクを算出し、モータトルク指令値を算出する操舵トルク演算部を有するので、的確な制御ができ、さらに安定性を向上させることが可能となる。
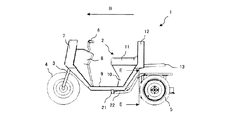
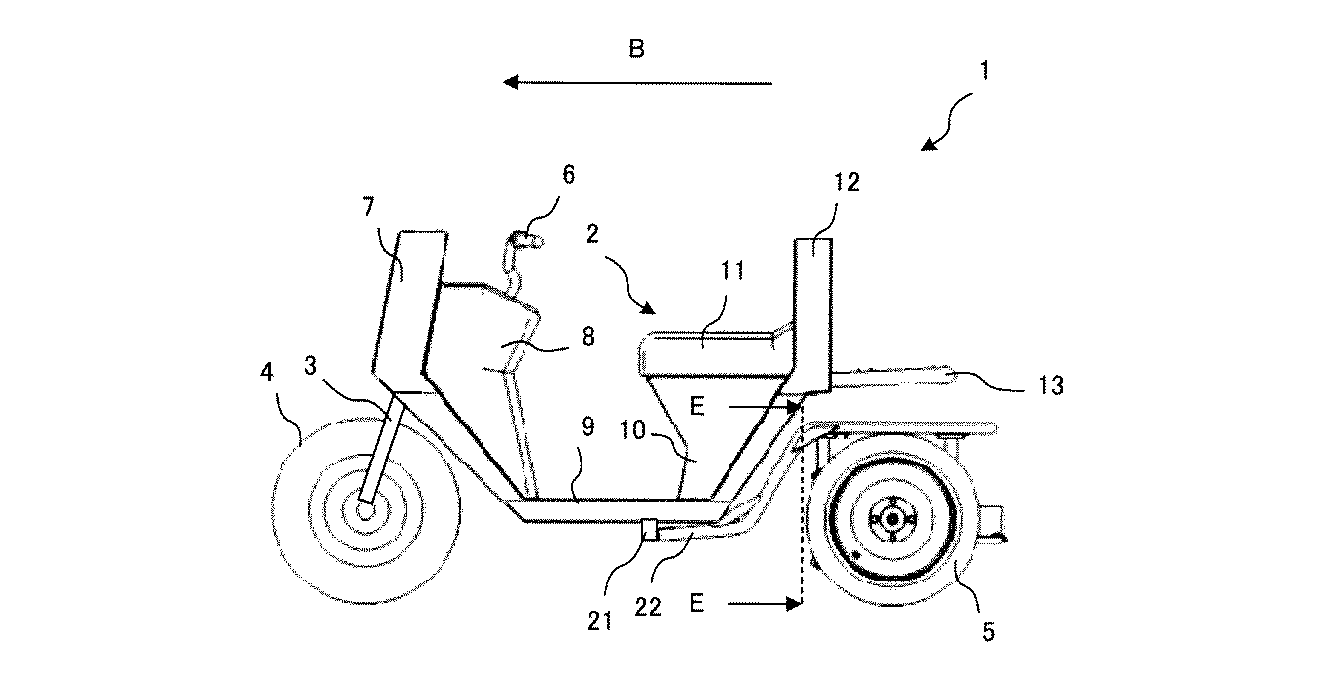
以下、本発明の一例としての実施形態を図面に基づいて説明する。図1及び図2は本実施形態の車両を示す図であり、図1は車両の正面図、図2は車両の側面図である。なお、図1の矢印Aの方向を幅方向、図2の矢印Bの方向を前方、その反対を後方とする。
車両1は、車体2の前方にフロントフォーク3を介して操舵輪としての前輪4を有し、後方の車体2の幅方向中心線Cを挟んで両側に二つの駆動輪としての後輪5L,5Rを有している。なお、前記車両1は、前輪が左右二輪であって後輪が一輪の三輪車両であってもよいし、前輪及び後輪が左右二輪の四輪車両であってもよいが、本実施の形態においては、図1に示されるように、前輪が一輪であって後輪が左右二輪の三輪車両である場合について説明する。
車体2の前方には、前輪4を操作するハンドル6を有し、ハンドル6と前輪4を連結する図示しないハンドルポストの前方にはフロントカウル7を設け、後方にはハンドルポストカバー8を設けている。ハンドルポストカバー8の後方には、低床式フロアー9が設けられ、低床式フロアー9の後方にシートカウル10が立ち上がる。シートカウル10には、シート11が置かれる。また、シート11には、背もたれ12が設けられ、背もたれ12から後方に向けて荷台13が延びている。
また、車体2の低床式フロアー9の下方からは、連結部材21を介して支持部材としての後方フレーム22が前後方向の軸に対して回転可能に設けられている。後方フレーム22は、低床式フロアー9の下方から荷台13の下方に延び、後述するリンク機構Lを介して後輪5を支持している。なお、後方フレーム22は、1本でもよいし、平行に2本設けてもよい。
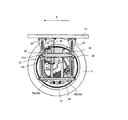
次に、後輪5付近の構成について説明する。図3は図1のD−D断面を矢印D方向から見た図、図4は後輪を後方から見た図、図5は後輪が傾斜した状態を示す図である。
図3に示すように、支持部材は、後方フレーム22と、後方フレーム22の図2に示した荷台13の前方側から下方に延びる第1支持部材としての第1支持フレーム23と、後方フレーム22の下方で第1支持フレーム23と連結され前後方向に伸びる第2支持部材としての第2支持フレーム24と、後方フレーム22の荷台13の後方側及び第1支持フレーム23の後方から下方に延び第2支持フレーム24と連結される第3支持部材としての第3支持フレーム25と、を有する。なお、第2支持フレーム24及び第3支持フレーム25は一体に形成されてもよい。
後方フレーム22には、アクチュエータ連結部材としての後輪傾斜用のモータ連結部材30によりアクチュエータとしての後輪傾斜用の後輪傾斜モータ31のケース等の固定部31aが連結固定されている。後輪傾斜モータ31の回転部31bは、前方で減速機32を介して第1リンク部材としてのシャフト一体リンク部材33に連結される。後輪傾斜モータ31の回転は、減速機32で減速され、シャフト一体リンク部材33に出力される。
車両1は、図4に示すように、シャフト一体リンク部材33と、第2リンク部材28と、第3リンク部材及び第4リンク部材としての左右のホイールモータブラケット42とで形成されるリンク機構Lを有する。
シャフト一体リンク部材33は、前方で第1支持フレーム23に第1ベアリング35を介して回転可能に支持され、後輪傾斜モータ31及び減速機32を貫通し、後方で第3支持フレーム25に第2ベアリング36を介して回転可能に支持されていると共に、後方第1リンク部材26に回転可能に連結されている軸部33aを有する。
また、図4に示すように、シャフト一体リンク部材33は、軸部33aと一体に設けられ車両1が直進状態の時に車体幅方向に延びるリンク部33bと、軸部33aの軸方向に対して直交する方向に突出したフランジ部33cとを有する。
軸部33aとリンク部33bとを一体に設けることにより、部品点数を少なくすることができ、低コスト化が可能となる。また、部品点数を少なくすることで、スペース及び質量を小さくすることが可能となる。さらに、部品同士を連結する部分のガタを低減することが可能となる。
なお、軸部33aは必ずしも後輪傾斜モータ31及び減速機32を貫通する必要はない。この場合、後方第1リンク部材26は、第3支持フレーム25に回転可能に支持されていればよい。
また、シャフト一体リンク部材33と後方第1リンク部材26は、それぞれ車両幅方向の一端で第1モータとしての第1ホイールモータ41Rを支持する第1車輪支持部材としての第1ホイールモータブラケット42Rの上方と第1連結軸27Rを介して回動可能に連結され、他端で第2モータとしての第2ホイールモータ41Lを支持する第2車輪支持部材としての第2ホイールモータブラケット42Lの上方と第2連結軸27Lを介して回動可能に連結されている。
第2リンク部材としての前方第2リンク部材28aは、車両幅方向の中央部分で、第2支持フレーム24の前方側と回動可能に連結されている。また、後方第2リンク部材28bは、第2支持フレーム24の後方側と回動可能に連結されている。
また、前方第2リンク部材28aと後方第2リンク部材28bは、それぞれ車両幅方向の一端側で第1ホイールモータ41Rを支持する第3リンク部材としての第1ホイールモータブラケット42Rの下方と第3連結軸29Rを介して回動可能に連結され、他端側で第2ホイールモータ41Lを支持する第4リンク部材としての第2ホイールモータブラケット42Lの下方と第4連結軸29Lを介して回動可能に連結されている。
図5は、後輪傾斜モータ31の動力により後輪5が傾斜した状態を示す図である。後輪傾斜モータ31の後方から見て反時計方向に回転したとすると、後輪傾斜モータ31の回転は、図3で示した減速機32で減速され、シャフト一体リンク部材33に伝達され、シャフト一体リンク部材33を反時計方向に回転させる。シャフト一体リンク部材33が反時計方向に回転すると、反作用により第1支持フレーム23がシャフト一体リンク部材33と逆方向に時計方向に回転すると共に、リンク機構Lが作動する。
図5に示すように、リンク機構Lは、シャフト一体リンク部材33及び図示しない後方第1リンク部材26と前方第2リンク部材28a及び図示しない後方第2リンク部材28bが前方から見て反時計方向に回転し、第1ホイールモータブラケット42R及び第2ホイールモータブラケット42Lが時計方向に回転する。そして、後輪5は傾斜する。第1ホイールモータブラケット42R及び第2ホイールモータブラケット42Lと共に、時計方向に回転し、後輪5が傾斜する。
したがって、旋回時には、左右の後輪5の路面に対する角度を変化させることで後方フレーム22及び後方フレーム22に連結された車体2を旋回内輪側へ傾斜させることが可能になり、旋回性能の向上と乗員の快適性の確保とを図ることができるようになっている。すなわち、車両1は車体2を横方向(左右方向)にも傾斜させることができる。この例の場合、後方から見て右側の右後輪5Rが旋回内側輪になり、後方から見て左側の左後輪5Lが旋回外側輪となる。
また、後輪傾斜モータ31が後方から見て時計方向に回転したとすると、第1ホイールモータブラケット42R及び第2ホイールモータブラケット42Lは、反時計方向に回転し、後輪5が傾斜する。
次に、操舵トルク制御の概要について説明する。
図6は、後輪の接地点を通る鉛直車幅平面で後輪にかかる角加速度を示す図である。
旋回時、内輪5Rの接地点5Raを中心として、外輪となる左後輪5Lにかかる車両、乗員及び荷物等の自重による鉛直方向の加速度をωa’とすると、図5に示すように、車体2の旋回時に旋回内側となる車輪5の接地点を中心として、後輪傾斜モータ31を作動した場合の左後輪5Lにかかる鉛直方向の加速度ω’は、自重による加速度ωa’以下でなければ左後輪5Lが道路RDから離間してしまい、不安定となる。
図7は、後輪の接地点を通る鉛直車幅平面での加速度の釣り合いを示す図である。
図7に示すように、重心Gにかかる加速度の釣り合いの式は、af=acsinφとなる。ωa’=af/d、d=H/cosφより、ωa’は以下の式(1)のように求められる。
ただし、
acは重力と遠心力の合成加速度、
Hは重心高、
Trはトレッド幅、
dは接地点と重心との距離
φは接地点と重心を結ぶ線と合成加速とのなす角、
afは接地点から見た合成加速度の分力
である。
acは重力と遠心力の合成加速度、
Hは重心高、
Trはトレッド幅、
dは接地点と重心との距離
φは接地点と重心を結ぶ線と合成加速とのなす角、
afは接地点から見た合成加速度の分力
である。
ω’がωa’を超えないようにするために、単純に図4に示した後輪傾斜モータ31による加速度を制限してしまうと、急操舵により遠心力が急変した場合に、後輪傾斜モータ31による傾斜が追従できず、車両1が不安定となるおそれがある。
そこで、本実施形態では、操舵トルク制御をすることで、ω’がω’aを超えないようにする。
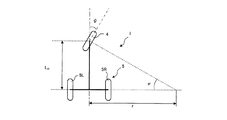
図8は車両の操舵時の水平面での状態を示す図、図9は後輪の傾斜角を示す図である。
図8の状態では、遠心力の加速度をarとすると、v=rw、ar=rw2より、ar=v2/rとなる。また、r=LH/tanψより、arは、以下の式(2)となる。
ただし、
vは車速、
rは旋回半径、
wは旋回角速度、
arは遠心力の加速度、
ψは操舵角、
LHはホイールベース、
である。
vは車速、
rは旋回半径、
wは旋回角速度、
arは遠心力の加速度、
ψは操舵角、
LHはホイールベース、
である。
また、車両1にかかる重力と分力が釣り合っている場合、以下の式(3)となる。
式(2)及び式(3)より、車速と操舵角から車両1が必要とする後輪5の傾斜角、すなわちリンク角予測値θtargetが以下の式(4)によって算出できる。
したがって、式(4)でもとめたリンク角θtargetのリンク角加速度θ''targetがω’以下となるように操舵トルクを制御する。
図10は操舵トルク制御前の状態を示す図、図11は操舵トルク制御の概要を示す図である。
例えば、図10に示すように、車両1のハンドル6を回転させて前輪4を矢印F1の方向に操舵して、旋回する場合で考える。この場合に、操舵トルク制御では、急操舵をしたことで、このままでは後輪5の傾斜が間に合わず、不安定になると判断した時、図示しないステアリングモータを制御して、図11に示すように、旋回時のハンドル6に、旋回方向とは逆方向の矢印F2方向の回生トルクを与える。すると、ハンドル6に負荷がかかり不安定な状態を低減することが可能となる。
図12は、回生抵抗トルク付与部の構造を示す図である。
回生抵抗トルク付与部70は、ステアリングモータ71と、ステアリングモータ71のモータ軸に固着された第1ギヤ71と、第1ギヤ71に噛み合うと共に、ハンドル6のハンドルポスト6aに固着され同軸に回転する第2ギヤ72と、ステアリングモータ71を作動するスイッチ74と、ハンドルポスト6aに固着され同軸に回転するエンコーダ75と、を有する。
ステアリングモータ71は、パルス波のデューティー比を変化させて変調するPWM(Pulse Width Modulation)等でモータトルクを付与する。ステアリングモータ71が作動すると、ハンドル6を回転させる際に、ハンドルポスト6aに固着された第2ギヤ73がステアリングモータ71のモータ軸に固着された第1ギヤ71から回生抵抗となるモータトルクの負荷を受ける。
図13は、リンク角加速度とモータトルクの関係を示す図である。
モータトルク指令値Pは、車速及び操舵角から計算されたリンク角加速度限界値とモータトルク最大値から算出される。例えば、図13に示すように、リンク角加速度θ''targetとモータトルクτを比例関係とした場合、モータトルク指令値は操舵方向に応じたモータトルク最大値τmを用いて、以下の式(5)から得られる。
ただし、
Tmはモータトルク最大値、
ω’aはリンク角加速度限界値、
θ''targetはリンク角加速度、
である。
Tmはモータトルク最大値、
ω’aはリンク角加速度限界値、
θ''targetはリンク角加速度、
である。
次に、操舵トルク制御のシステムを具体的に説明する。
図14は、操舵トルク制御のシステム図である。
ステアリングモータ71は、操舵トルク制御ECU100によって制御される。
操舵トルク制御ECU100へは、左車輪速センサ61L、右車輪速センサ61R、及び操舵角センサ62の各検知部材から入力信号が入力される。
左車輪速センサ61L、右車輪速センサ61R、及び操舵角センサ62から傾斜制御部100に入力された信号は、まずリンク角加速度予測値演算部101に入力される。リンク角加速度予測値演算部101から出力された信号は、操舵トルク演算部102に入力される。操舵トルク演算部102から出力された信号は、トルク指令値として、ステアリングモータ71に入力される。
図15は、操舵トルク制御のフローチャート図である。
操舵トルク制御は、まず、ステップ1で、リンク角加速度予測値演算部101がリンク角加速度予測値演算処理を実行する(ST1)。続いて、ステップ2で、操舵トルク演算部102が操舵トルク演算処理を実行する(ST2)。
次に、各ステップのサブルーチンについて説明する。
まず、リンク角加速度予測値演算部101が実行するリンク角加速度予測値演算処理について説明する。
図16はリンク角加速度予測値演算部での制御処理のフローチャート図である。
まず、ステップ11で、左車輪速センサ61Lから左車輪速VwLを取得し、右車輪速センサ61Rから右車輪速VwRを取得する(ST11)。続いて、ステップ12で、左車輪速VwL及び右車輪速VwRから車速vを算出する(ST12)。
次に、ステップ13で、操舵角センサ62から操舵角ψを取得する(ST13)。続いて、ステップ14で、図示しない記憶部からホイールベースLHを呼び出す(ST14)。
次に、ステップ15で、ステップ12、ステップ13、ステップ14で取得した車速v、操舵角ψ、ホイールベースLH、及び重力加速度gから式(4)で示したリンク角予測値θtargetを算出する(ST15)。
次に、ステップ16で、所定の制御周期Tsを呼び出す(ST16)。
次に、ステップ17で、図示しない記憶部に記憶してある前回求めたリンク角予測値θtargetoldを呼び出す(ST17)。次に、ステップ18で、リンク角予測値θtargetと前回求めたリンク角予測値θtargetoldとの差を制御周期Tsで割り、リンク角速度予測値θ’targetを算出する(ST18)。続いて、ステップ19で、ステップ15において算出したリンク角予測値θtargetを新たな前回求めたリンク角予測値θtargetoldとして図示しない記憶部に記憶する(ST19)。
次に、ステップ20で、図示しない記憶部に記憶してある前回求めたリンク角速度予測値θ’targetoldを呼び出す(ST20)。次に、ステップ21で、リンク角速度予測値θ’targetと前回求めたリンク角速度予測値θ’targetoldとの差を制御周期Tsで割り、リンク角加速度予測値θ''targetを算出する(ST21)。続いて、ステップ22で、ステップ20において算出したリンク角速度予測値θ’targetを新たな前回求めたリンク角速度予測値θ’targetoldとして図示しない記憶部に記憶する(ST22)。
次に、ステップ23で、ホイールモータトルク演算部102へステップ21において算出したリンク角加速度予測値θ''targetを送出する(ST23)。
次に、操舵トルク演算部102が実行する操舵トルク演算処理について説明する。
図17は、操舵トルク演算部での制御処理のフローチャート図である。
まず、ステップ31で、リンク角加速度予測値演算部101が実行するリンク角加速度予測値演算処理のステップ23において送出したリンク角加速度予測値θ''targetを受信する(ST31)。
次に、ステップ32で、式(1)で求めたリンク角加速度の限界値ω’aを呼び出す(ST32)。続いて、ステップ33で、図13に示すように、モータトルク最大値τmを呼び出す(ST33)。
次に、ステップ34で、式(5)から制御指令値Pを演算する(ST34)。続いて、ステップ35で、ステップ34において演算した制御指令値Pをステアリングモータ71に送出する(ST35)。
このように本実施形態によれば、車体2と、車体に回転可能に取り付けられた車輪であって、車体を操舵する操舵輪4と、前輪4を操舵するハンドル6と、車体に回転可能に取り付けられた車輪であって、車体を駆動する駆動輪5と、車体2に連結される支持部材22と、支持部材23,24,25に対して回転可能に連結されると共に、車体を旋回方向に傾斜させるリンク機構Lと、リンク機構Lを作動する後輪傾斜モータ31と、ハンドル6に回生抵抗を与えるステアリングモータ71と、車体2の旋回時に旋回内側となる車輪5の接地点を中心として、車体2の旋回時に旋回外側となる車輪5の接地点にかかる後輪傾斜モータ31の回転による鉛直方向の角加速度が、車体2の旋回時に旋回外側となる車輪5の接地点にかかる自重による鉛直方向の加速度を超えないように、ステアリングモータ71のモータトルクを制御する制御部100と、を有するので、安定して旋回すると共に、急操舵に対しても安定性が向上し、快適な乗り心地の車両1を提供することが可能となる。
また、本実施形態によれば、制御部100は、車体の旋回時に、旋回外側となる車輪の速度、旋回内側となる車輪の速度及び操舵角を検知して後輪傾斜モータ31の角速度に対応したリンク角加速度予測値を演算するリンク角加速度予測値演算部101を有するので、より精密な制御ができ、さらに安定性を向上させることが可能となる。
また、本実施形態によれば、制御部100は、リンク角加速度予測値演算部101から送出されたリンク角加速度予測値に対応したステアリングモータ71のモータトルクを算出し、モータトルク指令値を算出する操舵トルク演算部102を有するので、的確な制御ができ、さらに安定性を向上させることが可能となる。
1…車両、2…車体、4…前輪、5…後輪、6…ハンドル、22…後方フレーム(支持部材)、23…第1支持フレーム(支持部材)、24…第2支持フレーム(支持部材)、25…第3支持フレーム(支持部材)、28a…前方第2リンク部材(第2リンク部材)、31…後輪傾斜モータ(アクチュエータ)、32…減速機、33…シャフト一体リンク部材(第1リンク部材)、41…ホイールモータ、42R…第1ホイールモータブラケット(第3リンク部材)、42L…第2ホイールモータブラケット(第4リンク部材)、L…リンク機構、61…車輪速センサ、62…操舵角センサ、100…操舵トルク制御ECU(制御部)、101…リンク角加速度予測値演算部、102…操舵トルク演算部、
Claims (3)
- 車体と、
前記車体に回転可能に取り付けられた車輪であって、車体を操舵する操舵輪と、
前記操舵輪を操舵するハンドルと、
前記車体に回転可能に取り付けられた車輪であって、車体を駆動する駆動輪と、
前記車体に連結される支持部材と、
前記支持部材に対して回転可能に連結されると共に、車体を旋回方向に傾斜させるリンク機構と、
前記リンク機構を作動するアクチュエータと、
前記ハンドルに回生抵抗を与えるステアリングモータと、
前記車体の旋回時に旋回内側となる前記車輪の接地点を中心として、前記車体の旋回時に旋回外側となる前記車輪の接地点にかかる前記アクチュエータの回転による鉛直方向の角加速度が、前記車体の旋回時に旋回外側となる前記車輪の接地点にかかる自重による鉛直方向の加速度を超えないように、前記ステアリングモータのモータトルクを制御する制御部と、
を有することを特徴とする車両。 - 前記制御部は、
前記車体の旋回時に、旋回外側となる前記車輪の速度、旋回内側となる前記車輪の速度及び操舵角を検知して前記アクチュエータの角速度に対応したリンク角加速度予測値を演算するリンク角加速度予測値演算部を有することを特徴とする請求項1に記載の車両。 - 前記制御部は、
前記リンク角加速度予測値演算部から送出されたリンク角加速度予測値に対応した前記ステアリングモータのモータトルクを算出し、モータトルク指令値を算出する操舵トルク演算部を有することを特徴とする請求項2に記載の車両。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011028115A JP2012166637A (ja) | 2011-02-14 | 2011-02-14 | 車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011028115A JP2012166637A (ja) | 2011-02-14 | 2011-02-14 | 車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012166637A true JP2012166637A (ja) | 2012-09-06 |
Family
ID=46971231
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011028115A Withdrawn JP2012166637A (ja) | 2011-02-14 | 2011-02-14 | 車両 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012166637A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013071691A (ja) * | 2011-09-29 | 2013-04-22 | Equos Research Co Ltd | 車両 |
| WO2017086403A1 (ja) * | 2015-11-20 | 2017-05-26 | ヤマハ発動機株式会社 | 車両 |
| EP3628578A4 (en) * | 2017-05-19 | 2021-03-10 | Equos Research Co., Ltd. | VEHICLE |
-
2011
- 2011-02-14 JP JP2011028115A patent/JP2012166637A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013071691A (ja) * | 2011-09-29 | 2013-04-22 | Equos Research Co Ltd | 車両 |
| WO2017086403A1 (ja) * | 2015-11-20 | 2017-05-26 | ヤマハ発動機株式会社 | 車両 |
| JPWO2017086403A1 (ja) * | 2015-11-20 | 2018-04-26 | ヤマハ発動機株式会社 | 車両 |
| US10625771B2 (en) | 2015-11-20 | 2020-04-21 | Yamaha Hatsudoki Kabushiki Kaisha | Vehicle with lean control |
| EP3628578A4 (en) * | 2017-05-19 | 2021-03-10 | Equos Research Co., Ltd. | VEHICLE |
| US11472474B2 (en) | 2017-05-19 | 2022-10-18 | Aisin Corporation | Vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103328315B (zh) | 车辆 | |
| CN103687782B (zh) | 车辆 | |
| CN103079946B (zh) | 车辆 | |
| JP2013169946A (ja) | 電気自動車 | |
| JP6603953B2 (ja) | 車両 | |
| JP2016165986A (ja) | 車両 | |
| JP6277404B2 (ja) | 自動車 | |
| JP6898428B2 (ja) | 車両 | |
| CN102770334A (zh) | 车辆 | |
| JP2013112238A (ja) | 車両 | |
| JP2013144513A (ja) | 車両 | |
| JP2010000989A (ja) | 二輪自動車 | |
| JP2013199214A (ja) | 車両 | |
| JP2012166637A (ja) | 車両 | |
| JP2017178188A (ja) | 車両 | |
| JP2013071688A (ja) | 車両 | |
| JP2013071691A (ja) | 車両 | |
| JP5516900B2 (ja) | 車両 | |
| WO2018180754A1 (ja) | 車両 | |
| JP2011194953A (ja) | 車両 | |
| WO2011102106A1 (ja) | 車両 | |
| JP2019177794A (ja) | 自動傾斜車両 | |
| JP7747903B2 (ja) | リーン車両 | |
| JP2013112234A (ja) | 車両 | |
| JP5382331B2 (ja) | 三輪車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140513 |