JP2012192473A - 立体視ロボットピッキング装置 - Google Patents
立体視ロボットピッキング装置 Download PDFInfo
- Publication number
- JP2012192473A JP2012192473A JP2011056906A JP2011056906A JP2012192473A JP 2012192473 A JP2012192473 A JP 2012192473A JP 2011056906 A JP2011056906 A JP 2011056906A JP 2011056906 A JP2011056906 A JP 2011056906A JP 2012192473 A JP2012192473 A JP 2012192473A
- Authority
- JP
- Japan
- Prior art keywords
- container
- workpiece
- camera
- cameras
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Manipulator (AREA)
Abstract
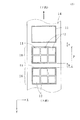
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
【選択図】図1
Description
ロボットピッキング装置はワークの高さ位置に基づいてロボットの吸引部をワークの吸着が可能な高さに配置する。ワークの高さ位置が一定である場合、ワークを吸着するためのロボットの吸引部の高さは固定することができる。
しかしながら、ワークが食品を封入した袋物の場合、袋の膨らみや食品の出来上がりの大きさ等にバラつきがあり、ロボットの吸引部を常に一定の高さにすると、吸引部とワークの袋部分の間に大きな隙間が生じてワークを吸着できなかったり、ロボットのハンド部がワークを押しすぎて食品の変形や袋の割れ等が生じたりする。また、ワークが配列されたコンテナの底面の歪みによっても配列位置でワークの高さ位置にバラつきが生じる。
ワークの高さ位置を検出する方法として、対となるカメラでワークを撮像した画像を基にワークの3次元位置を算出するステレオ方式が知られており、その具体例が特許文献1に記載されている。
特許文献1では、対となるカメラの撮像範囲の重なる領域でワークを撮像し、その撮像された各画像中で予め定義しておいたワークの参照点を検出し、参照点の画像中での2次元位置からワークの3次元位置を算出している。
また、撮像方向が平行な対となるカメラを用いれば、3次元位置の算出を行うためのプログラム等の設計を簡略化することができる。この場合、ワークの大きさ等に応じて、ワークとカメラの間隔を長くして、カメラの撮像範囲の重なる領域を広げ、各カメラが撮像範囲の重なる領域でワークを撮像可能にすることが考えられる。
本発明は、かかる事情に鑑みてなされるもので、カメラとワークの間隔が長くなるのを抑制し、高い分解能を保有した画像を基にパターンマッチングによりワークの検出を行って、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供することを目的とする。
また、ワーク取出し位置よりコンテナの移動ピッチ分上流側にあったコンテナをカメラBによって撮像した画像とワーク取出し位置にあるコンテナをカメラAによって撮像した画像を基に、ワーク取出し位置に配置されたコンテナ内の、下流側半分にあるワークの3次元位置を算出し、ワーク取出し位置にあるコンテナをカメラA、Bで撮像した各画像を基に、ワーク取出し位置に配置されたコンテナ内の、上流側半分にあるワークの3次元位置を算出する場合には、コンテナの上流側半分及び下流側半分に分けて確実にコンテナ内のワークの3次元位置を算出することができる。
図1、図2に示すように、本発明の一実施の形態に係る立体視ロボットピッキング装置10は、ワーク(物品)12の仕分け現場等に設置され、コンテナ11内に収容された複数のワーク12を順次ロボット13によって別位置に移動する装置である。以下、詳細に説明する。
ワーク12は、本実施の形態において、食品(例えばパン)を袋詰めしたものであり、各ワーク12は食品の大きさや袋内の空気量のバラつき等によって、水平配置されたコンテナ11内に収容された状態で高さが不揃いである。
ロボット13には、ワーク12を吸着保持する吸引部17(本実施の形態では、真空パッド)が設けられており、ロボット13は、コンテナ11内に収容されているワーク12を吸引部17で吸着保持して別位置にあるコンテナに収容する。
ロボット13はベルトコンベア14の上方で支持フレーム21に固定されたパラレルリンクロボットであり、予め定められた範囲内で吸引部17を所望の位置に配置することができる。
ベルトコンベア14はコンテナ11を間欠的に移動ピッチP(所定ピッチ)移動させて、ロボット13の吸引部17がコンテナ11内に収容されたワーク12を吸着保持可能なワーク取出し位置18まで各コンテナ11を順次送る。
ベルトコンベア14上の複数のコンテナ11は、図2に示すように、移動ピッチPと同ピッチで配置されており、隣り合うコンテナ11にはそれぞれ長さDの間隔が設けられている。各コンテナ11は、サーボモータ19の駆動と停止の繰り返しによって、順次ワーク取出し位置18で停止し、ロボット13によって必要数のワーク12が取出された後に、ワーク取出し位置18から移動する。
カメラ15、16は実質的に同一高さに設けられ、カメラ15はワーク取出し位置18にあるコンテナ11全体を撮像可能な位置に配置され、カメラ16はワーク取出し位置18にあるコンテナ11を部分的に撮像可能な位置に配置されている。また、カメラ15、16は同仕様のカメラであり、画素数、視野角、焦点距離等が同一である。
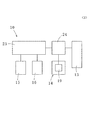
画像処理手段23は、カメラ15、16からカメラ15、16が撮像した各画像をそれぞれ取得して、パターンマッチングによって各画像中に存在しているワーク12を検出し、各画像中でのワーク12の2次元位置を算出(検知)する。画像処理手段23は、各種ワークごとに各ワークに印字されている文字や図柄等をマッチング用のサンプルとして記憶しており、カメラ15、16によって撮像された各画像に対しマッチング用のサンプルを基にしたワークの検出処理を行う。
画像処理手段23は、マイクロコンピュータ、メモリー及びROM等によって構成され、ROMにはワーク12の3次元位置を算出するためのプログラム等が格納されている。
制御手段24は、サーボモータ19に停止用の指令信号を送信してベルトコンベア14を停止させ、画像処理手段23に指令信号を送信してカメラ15、16に停止中のコンテナ11を撮像させる。
制御手段24は、画像処理手段23にカメラ15、16によって撮像された画像に基づいてコンテナ11内のワーク12の3次元位置を算出させ、ロボット13にワーク取出し位置18にあるコンテナ11に収容されているワーク12を順次、収容先のコンテナ内に移動させる。そして、ワーク取出し位置18にあるコンテナ11から必要数のワーク12を取出した後、制御手段24は、作動用の指令信号をサーボモータ19に送信して、ベルトコンベア14上のコンテナ11を移動ピッチPだけ移動させる。
以下、ワーク取出し位置18よりコンテナの移動ピッチP分上流側にあるコンテナ11の位置を取出し手前位置25ともいう。
従って、カメラ16は、1つの画面中に取出し手前位置25にあるコンテナ11の少なくとも下流側半分とワーク取出し位置18にあるコンテナ11の少なくとも上流側半分を撮像することができる。
そして、画像処理手段23は、ワーク取出し位置18にあるコンテナ11をカメラ15、16で撮像した各画像を基にしてワーク取出し位置18に配置されたコンテナ11内の上流側半分にあるワーク12の3次元位置を算出する。
カメラ15、16は、撮像中心方向がZ軸に沿い、かつ、カメラ15、16によって撮像される各画像の左右方向及び上下方向が、それぞれX軸及びY軸に沿う(図4、図5参照)ように向きが調整されている。
なお、ベルトコンベア14上のコンテナ11は、Y軸のマイナス向きに移動する(図1、図2参照)。
従来、ワークのZ座標は、対となるカメラでワークを撮像した画像を基に算出可能であることが知られており、その算出式は式1に示す通りである。
Z=(S×R)/△Y (式1)
本実施の形態では、図6に示すように、対となるカメラ15、16の光学中心間の距離はs1である。
焦点距離は、カメラモデルにおいて光学中心とカメラが撮像する画像間の距離であり、カメラ15、16は焦点距離が等しく共にr1である。
視差は、対となるカメラで同一のワークを撮像した際に、一方のカメラの画像中におけるそのワークの位置と他方のカメラの画像中におけるそのワークの位置の差である。本実施の形態では、カメラ15、16によって平行ステレオカメラが構成されており、カメラ15、16によって撮像された同一のワーク12は、各画像中でのX座標が等しい。従って、カメラ15、16の各画像中でのY座標の差が視差になる。
画像処理手段23は、カメラ15の画像中における各ワーク12の平面位置から、ワーク取出し位置18にあるコンテナ11内の全てのワーク12についてXY座標を算出する。
同じタイミング(即ちベルトコンベア14が停止してから作動するまでの間のタイミング)で撮像されたカメラ15、16の各画像には共に、図4(A)、(B)に示すようにワーク取出し位置18にあるコンテナ11の上流側半分に収容されたワーク12が全て映っている。画像処理手段23は、コンテナ11の上流側半分に収容された全てのワーク12について、カメラ15の画像中の平面位置とカメラ16の画像中の平面位置とを基に視差を求める。そして、画像処理手段23は、この求めた視差とS=s1、R=r1を式1に代入してワーク取出し位置18にあるコンテナ11の上流側半分に収容されたワーク12全てについてZ座標を算出する。
このため画像処理手段23は、カメラ15の最新の画像とカメラ16が1つ前のタイミングで撮像した画像を用いて、各画像中におけるワーク12の平面位置から、コンテナ11の下流側半分にあるワーク12それぞれについて視差を求める。そして、画像処理手段23は、この求めた視差を基に式1によってワーク取出し位置18にあるコンテナ11の下流側半分に収容されたワーク12のZ座標を算出する。
このワーク12の対応付けは、カメラ15、16の各画像中におけるワーク12の平面位置を基にして行われる。例えば、図4(B)に示すカメラ16の画像中で”W1”を付したワーク12は、その画像中での位置から、図4(A)に示すカメラ15の画面中で”W1”を付したワーク12であるという対応付けが可能である。また、1つ前のタイミングでカメラ16によって撮像された図5(B)に示す”W2”を付したワーク12は、その画像中での平面位置から、カメラ15の最新の画面中で図5(A)に示す”W2”を付したワーク12であるという対応付けができる。
そこで、ワーク12の3次元位置を算出するアルゴリズムを変えず、カメラ15、16を同一高さに配置するという前提で、カメラ15、16とベルトコンベア14上のコンテナ11の距離を最も近くする条件について考えると、以下に示す条件となる。
(1)カメラ15の撮像中心をワーク取出し位置18にあるコンテナ11の中心に配置する。
(2)カメラ16の撮像中心をワーク取出し位置18にあるコンテナ11と取出し手前位置25にあるコンテナ11の中間点に配置する。
(3)上記(1)、(2)の条件を満たした上で、カメラ15がワーク取出し位置18にあるコンテナ11全体を撮像可能で、しかもカメラ16がワーク取出し位置18にあるコンテナ11の上流側半分及び取出し手前位置25にあるコンテナ11の下流側半分を撮像可能な高さに、カメラ15、16をそれぞれ配置する。
制御手段24は、画像処理手段23が算出した各ワーク12の3次元位置を基にして、ワーク12ごとにロボット13が吸引部17によってワーク12を吸着保持可能な吸引部17の配置目標位置(以下、「吸引部配置目標位置」ともいう)を決定する。
そして、制御手段24は、ロボット13を動かしてロボット13の吸引部17を一のワーク12に対応する吸引部配置目標位置に配置し、吸引部17に吸引を行わせてそのワーク12を吸着保持させ、収容先のコンテナに移動する。このようにして、コンテナ11内のワーク12は順次収容先のコンテナに移動される。
吸引部配置目標位置はワークの上方位置に限定されず、吸引を行う際のワークに対するロボットの吸着部の位置に応じて決定することができる。例えば、ロボットの吸引部がワークを斜め上から吸引する場合、画像処理手段が算出したワークの3次元位置に対し、斜め上の方向に予め定められた間隔を有する位置が吸引部配置目標位置となる。
なお、制御手段24は、マイクロコンピュータ、メモリー及びROM等によって構成され、ROMには吸引部配置目標位置を決定するためのプログラム等が格納されている。
立体視ロボットピッキング装置10の変形例である立体視ロボットピッキング装置10aは、図7に示すように、3台のカメラ15、16a、16b(即ち、1台のカメラAと2台のカメラB)を備えている。立体視ロボットピッキング装置10aは、主としてカメラ数が多い点及びワーク12のZ座標の算出に用いる画像が異なる点で立体視ロボットピッキング装置10と相違するが、その他の多くの点において立体視ロボットピッキング装置10と同じである。
なお、立体視ロボットピッキング装置10と同一の構成要素については同一の符号を付して詳しい説明を省略する。
カメラ16a、15、16bは、固定部材22aを介して支持フレーム21に実質的に同じ高さ位置で取り付けられ、コンテナ11の移動方向に沿って順に配置されている。カメラ16a、15、16bは同一仕様のカメラである。
カメラ16aは、ワーク取出し位置18にあるコンテナ11の少なくとも上流側半分を撮像可能な位置に配置され、カメラ16bはワーク取出し位置18にあるコンテナ11の少なくとも下流側半分を撮像可能な位置に配置されている。
また、画像処理手段は、ワーク取出し位置18にあるコンテナ11をカメラ15及びカメラ16bで撮像した各画像を基に、ワーク取出し位置18に配置されたコンテナ11内の下流側半分にあるワーク12の3次元位置を算出する。
また、コンテナ11内の下流側半分にあるワーク12のZ座標は、カメラ15、16bの各画像中のワーク12の視差とS=s2’、R=r1を式1に代入することによって算出できる。
カメラ15、16aの光学中心間の距離s1’及びカメラ15、16bの光学中心間の距離s2’を同値(s1’=s2’)にすることによって、式1のSが1つの値になり演算処理の設計等の簡略化を図ることができる。
例えば、ロボットは、パラレルリンクロボットに限定されず、パラレルリンクロボット以外のロボット、例えば多関節ロボット等を用いることが可能である。
また、ワークの3次元位置を検出するために用いられる複数のカメラ(カメラAとカメラB)の配置関係は、ワークの3次元位置を検出できれば、平行ステレオカメラを形成する配置でなくてもよい。
Claims (5)
- コンテナ内に収容されたワークを順次ロボットによって別位置に移動する立体視ロボットピッキング装置において、
前記ワークを吸着保持する吸引部が設けられた前記ロボットと、
前記コンテナを所定ピッチ移動させて、前記吸引部が該コンテナ内に収容された前記ワークを吸着保持可能なワーク取出し位置まで該コンテナを送る移動手段と、
前記ワーク取出し位置にある前記コンテナ全体を撮像する1台のカメラAと、
前記ワーク取出し位置にある前記コンテナを部分的に撮像する1台又は2台のカメラBと、
前記カメラA、Bで撮像した各画像中の前記ワークの2次元位置から該ワークの3次元位置を算出する画像処理手段と、
前記画像処理手段で算出した前記ワークの3次元位置を基に前記吸引部の配置目標位置を決定し、前記ロボットを動かして前記ワークを吸着保持させる制御手段とを有し、
前記カメラA、Bは、前記コンテナの移動方向に沿って配置され、前記画像処理手段は、前記カメラA、Bが撮像した各画像中での前記ワークをパターンマッチングによって検出して、前記カメラA、Bにより撮像された該ワークの各画像中の2次元位置を算出することを特徴とする立体視ロボットピッキング装置。 - 請求項1記載の立体視ロボットピッキング装置において、前記カメラBは、1台であって、前記コンテナの移動方向に沿って前記ワーク取出し位置より前記コンテナの移動ピッチ分上流側にある前記コンテナの、少なくとも下流側半分を撮像可能で、かつ、前記ワーク取出し位置にある前記コンテナの、少なくとも上流側半分を撮像可能な位置に配置され、
前記画像処理手段は、前記コンテナの移動方向に沿って前記ワーク取出し位置より前記コンテナの移動ピッチ上流側にあった前記コンテナを前記カメラBによって撮像した画像と前記ワーク取出し位置にある該コンテナを前記カメラAによって撮像した画像を基に、前記ワーク取出し位置に配置された前記コンテナ内の、下流側半分にある前記ワークの3次元位置を算出し、前記ワーク取出し位置にある該コンテナを前記カメラA、Bで撮像した各画像を基に、前記ワーク取出し位置に配置された前記コンテナ内の、上流側半分にある前記ワークの3次元位置を算出することを特徴とする立体視ロボットピッキング装置。 - 請求項1記載の立体視ロボットピッキング装置において、前記カメラBは2台あって、一方の該カメラBは、前記ワーク取出し位置にある前記コンテナの、少なくとも前記コンテナの移動方向の上流側半分を撮像可能な位置に配置され、他方の前記カメラBは前記ワーク取出し位置にある前記コンテナの、少なくとも下流側半分を撮像可能な位置に配置され、
前記画像処理手段は、前記ワーク取出し位置にある前記コンテナを前記カメラA及び前記一方のカメラBで撮像した各画像を基に、前記ワーク取出し位置に配置された前記コンテナ内の上流側半分にある前記ワークの3次元位置を算出し、前記ワーク取出し位置にある前記コンテナを前記カメラA及び前記他方のカメラBで撮像した各画像を基に、前記ワーク取出し位置に配置された前記コンテナ内の下流側半分にある前記ワークの3次元位置を算出することを特徴とする立体視ロボットピッキング装置。 - 請求項1〜3のいずれか1項に記載の立体視ロボットピッキング装置において、前記制御手段は、前記画像処理手段によって算出された前記ワークの3次元位置まで予め定められた間隔を有する位置を前記吸引部の配置目標位置として決定することを特徴とする立体視ロボットピッキング装置。
- 請求項1〜4のいずれか1項に記載の立体視ロボットピッキング装置において、前記カメラA、Bの各撮像方向は平行であることを特徴とする立体視ロボットピッキング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056906A JP5544320B2 (ja) | 2011-03-15 | 2011-03-15 | 立体視ロボットピッキング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056906A JP5544320B2 (ja) | 2011-03-15 | 2011-03-15 | 立体視ロボットピッキング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012192473A true JP2012192473A (ja) | 2012-10-11 |
| JP5544320B2 JP5544320B2 (ja) | 2014-07-09 |
Family
ID=47084884
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011056906A Active JP5544320B2 (ja) | 2011-03-15 | 2011-03-15 | 立体視ロボットピッキング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5544320B2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015115943A1 (de) | 2014-09-29 | 2016-03-31 | Fanuc Corporation | Erkennungsverfahren und Erkennungsvorrichtung zum Erkennen der dreidimensionalen Position eines Objekts |
| JP2016120566A (ja) * | 2014-12-25 | 2016-07-07 | 株式会社キーエンス | 画像処理装置、画像処理システム、画像処理方法及びコンピュータプログラム |
| JPWO2015129388A1 (ja) * | 2014-02-28 | 2017-03-30 | 株式会社イシダ | 箱詰めシステム |
| DE102017122010A1 (de) | 2016-09-30 | 2018-04-05 | Fanuc Corporation | Erkennungsverfahren und Erkennungseinrichtung zur Erkennung einer dreidimensionalen Position eines Objekts |
| CN109048862A (zh) * | 2018-09-03 | 2018-12-21 | 天津永兴泰科技股份有限公司 | 一种基于机器视觉的零部件分拣机器人 |
| CN109465809A (zh) * | 2018-12-17 | 2019-03-15 | 中北大学 | 一种基于双目立体视觉定位识别的智能垃圾分类机器人 |
| CN109692825A (zh) * | 2019-01-11 | 2019-04-30 | 上海卓畅信息技术有限公司 | 一种零件的分拣方法及分拣设备 |
| CN117337691A (zh) * | 2023-09-21 | 2024-01-05 | 仲恺农业工程学院 | 基于深度神经网络的火龙果采摘方法及采摘机器人 |
| CN118123856A (zh) * | 2024-03-20 | 2024-06-04 | 北京中科原动力科技有限公司 | 一种果蔬采摘机器人控制方法及装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107538466B (zh) * | 2016-06-23 | 2020-06-19 | 沈阳新松机器人自动化股份有限公司 | 并联机器人 |
| CN109482503B (zh) * | 2018-10-24 | 2021-01-08 | 东北大学 | 基于视觉的移动分拣机器人及其分拣方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61152382A (ja) * | 1984-12-27 | 1986-07-11 | 三井造船株式会社 | 溶接ロボツトの制御方法 |
| JPH01109089A (ja) * | 1986-09-19 | 1989-04-26 | Hitachi Metals Ltd | マニプレータの位置決め方法 |
| JPH06219352A (ja) * | 1993-01-27 | 1994-08-09 | Daifuku Co Ltd | ガラス取付設備 |
| JPH07299782A (ja) * | 1994-04-26 | 1995-11-14 | Kawasaki Heavy Ind Ltd | デパレタイズ用画像作成方法および画像作成装置 |
| JP2004090183A (ja) * | 2002-09-02 | 2004-03-25 | Fanuc Ltd | 物品の位置姿勢検出装置及び物品取出し装置 |
| JP2007130711A (ja) * | 2005-11-09 | 2007-05-31 | Ishikawajima Harima Heavy Ind Co Ltd | ピッキング順序決定方法、装置及びそのプログラム、並びにピッキングシステム |
| JP2008087074A (ja) * | 2006-09-29 | 2008-04-17 | Fanuc Ltd | ワーク取り出し装置 |
-
2011
- 2011-03-15 JP JP2011056906A patent/JP5544320B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61152382A (ja) * | 1984-12-27 | 1986-07-11 | 三井造船株式会社 | 溶接ロボツトの制御方法 |
| JPH01109089A (ja) * | 1986-09-19 | 1989-04-26 | Hitachi Metals Ltd | マニプレータの位置決め方法 |
| JPH06219352A (ja) * | 1993-01-27 | 1994-08-09 | Daifuku Co Ltd | ガラス取付設備 |
| JPH07299782A (ja) * | 1994-04-26 | 1995-11-14 | Kawasaki Heavy Ind Ltd | デパレタイズ用画像作成方法および画像作成装置 |
| JP2004090183A (ja) * | 2002-09-02 | 2004-03-25 | Fanuc Ltd | 物品の位置姿勢検出装置及び物品取出し装置 |
| JP2007130711A (ja) * | 2005-11-09 | 2007-05-31 | Ishikawajima Harima Heavy Ind Co Ltd | ピッキング順序決定方法、装置及びそのプログラム、並びにピッキングシステム |
| JP2008087074A (ja) * | 2006-09-29 | 2008-04-17 | Fanuc Ltd | ワーク取り出し装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2015129388A1 (ja) * | 2014-02-28 | 2017-03-30 | 株式会社イシダ | 箱詰めシステム |
| DE102015115943A1 (de) | 2014-09-29 | 2016-03-31 | Fanuc Corporation | Erkennungsverfahren und Erkennungsvorrichtung zum Erkennen der dreidimensionalen Position eines Objekts |
| JP2016120566A (ja) * | 2014-12-25 | 2016-07-07 | 株式会社キーエンス | 画像処理装置、画像処理システム、画像処理方法及びコンピュータプログラム |
| DE102017122010A1 (de) | 2016-09-30 | 2018-04-05 | Fanuc Corporation | Erkennungsverfahren und Erkennungseinrichtung zur Erkennung einer dreidimensionalen Position eines Objekts |
| CN109048862A (zh) * | 2018-09-03 | 2018-12-21 | 天津永兴泰科技股份有限公司 | 一种基于机器视觉的零部件分拣机器人 |
| CN109465809A (zh) * | 2018-12-17 | 2019-03-15 | 中北大学 | 一种基于双目立体视觉定位识别的智能垃圾分类机器人 |
| CN109692825A (zh) * | 2019-01-11 | 2019-04-30 | 上海卓畅信息技术有限公司 | 一种零件的分拣方法及分拣设备 |
| CN117337691A (zh) * | 2023-09-21 | 2024-01-05 | 仲恺农业工程学院 | 基于深度神经网络的火龙果采摘方法及采摘机器人 |
| CN117337691B (zh) * | 2023-09-21 | 2024-04-05 | 仲恺农业工程学院 | 基于深度神经网络的火龙果采摘方法及采摘机器人 |
| CN118123856A (zh) * | 2024-03-20 | 2024-06-04 | 北京中科原动力科技有限公司 | 一种果蔬采摘机器人控制方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5544320B2 (ja) | 2014-07-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5544320B2 (ja) | 立体視ロボットピッキング装置 | |
| CN110322457B (zh) | 一种2d与3d视觉结合的拆垛方法 | |
| CN103029129B (zh) | 机器人系统和被加工物的制造方法 | |
| JP5282717B2 (ja) | ロボットシステム | |
| US9920470B2 (en) | Method for capturing an item of laundry | |
| CA2887261C (en) | Vision-assisted system and method for picking of rubber bales in a bin | |
| US10882701B2 (en) | Method and apparatus for detecting faults during object transport | |
| JP6014315B2 (ja) | 電子部品装着装置の測定方法 | |
| JPWO2020009148A1 (ja) | ワーク搬送システムおよびワーク搬送方法 | |
| JP2017100214A (ja) | マニピュレータシステム、撮像システム、対象物の受け渡し方法、及び、マニピュレータ制御プログラム | |
| JP2014087913A (ja) | 物品取出装置及び物品取出方法 | |
| JP6279581B2 (ja) | 実装装置及び部品検出方法 | |
| JP2019025634A (ja) | 物品搬送装置 | |
| US10932401B2 (en) | Component mounting machine | |
| CN113727817B (zh) | 控制器 | |
| JP2020040193A (ja) | 情報処理装置及びピッキングシステム | |
| CN106465580A (zh) | 元件数据生成装置、表面安装机及元件数据生成方法 | |
| JP7682188B2 (ja) | ピースグッズを分離するためのデバイスおよび方法 | |
| JP5868257B2 (ja) | ワークの位置検出方法及びそれを用いたワークの搬送方法 | |
| JP5238730B2 (ja) | 部品実装機、部品検出装置、及び部品実装方法 | |
| CN106990571A (zh) | 取纸系统 | |
| JP7095089B2 (ja) | 実装機および実装システム | |
| CN104541596A (zh) | 部件安装装置以及位置修正方法 | |
| CN121693759A (zh) | 控制装置、机器人系统以及控制方法 | |
| JP2010125583A (ja) | ロボットアーム装置、ロボットアーム装置の制御方法および制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130522 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140331 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140512 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5544320 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |