JP2017018004A - 水耕栽培装置 - Google Patents
水耕栽培装置 Download PDFInfo
- Publication number
- JP2017018004A JP2017018004A JP2015135933A JP2015135933A JP2017018004A JP 2017018004 A JP2017018004 A JP 2017018004A JP 2015135933 A JP2015135933 A JP 2015135933A JP 2015135933 A JP2015135933 A JP 2015135933A JP 2017018004 A JP2017018004 A JP 2017018004A
- Authority
- JP
- Japan
- Prior art keywords
- stem
- opening
- peripheral surface
- unit
- tip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





























Landscapes
- Hydroponics (AREA)
- Cultivation Receptacles Or Flower-Pots, Or Pots For Seedlings (AREA)
Abstract
【課題】地上部が形成される前の地下部のみが存在する段階から植物を栽培することができ、かつ、地上部が形成された後の必要な時期に地下部への光の照射を防止することができる水耕栽培装置を提供する。【解決手段】水耕栽培装置10は、仕切り部2の一部を構成し、開口部2aの内周面と茎20bとの間に隙間が存在する状態から開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ変化し得る遮光性の絞り機構102と、絞り機構102の状態を変化させるように絞り機構102を駆動する駆動部3と、塊状栄養蓄積部20aから伸びる茎20bの先端が開口部2aを通過した場合に、駆動部3を制御することによって、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を変化させる制御部4と、を備えている。【選択図】図1
Description
本発明は、土壌を用いることなく、植物を栽培する水耕栽培装置に関する。
一般に、根菜類の土耕栽培においては、塊状栄養蓄積部は、土壌で被覆される。たとえば、根菜類の一例のジャガイモの塊状栄養蓄積部である塊茎、いわゆる種イモは、土壌中に埋設される。その理由は、根菜類は、地下部に光が照射されると、成長不良が生じてしまうためである。たとえば、ジャガイモを栽培する場合、地下部に光が照射されると、その光が照射された地下部は地上部として成長してしまう。
より具体的に言うと、地下茎として地下で成長するはずであった部分は、地上に露出すると、緑化した地上茎として成長してしまう。この緑化した地上茎は、有毒成分を含有するため、食用野菜としての商業的価値を失ってしまう。したがって、根菜類の土耕栽培が行われている圃場においては、光が地下部に照射されることを防止するために、塊茎や塊根等の塊状栄養蓄積部が土壌に被覆されるように土壌を高く盛り上げる作業が必要になる。
一方、水耕栽培においては、次の特許文献1に開示されているように、土耕栽培のような盛り土ではなく、遮光されるべき空間への光の進入を防止するために、遮光壁を形成する技術が検討されている。
上記の特許文献1に開示された遮光壁によれば、茎および葉等の地上部が形成された段階で水耕栽培装置に植物が固定される。したがって、特許文献1に開示された技術によれば、地上部が形成されていない地下部のみの段階から水耕栽培装置内で植物を栽培することはできない。したがって、地上部が形成された後の必要な時期に地下部への光の照射を防止しながらも、地上部が形成される前の地下部のみが存在する段階から水耕栽培装置内で植物を栽培することができる技術が求められている。
本発明は、上述の問題に鑑みてなされたものである。そして、本発明の目的は、地上部が形成される前の地下部のみが存在する段階から植物を栽培することができ、かつ、地上部が形成された後の必要な時期に地下部への光の照射を防止することができる水耕栽培装置を提供することである。
上記の課題を解決するために、本発明の第1の態様の水耕栽培装置は、植物の塊状栄養蓄積部を収容するように構成された遮光性の栽培槽と、前記栽培槽に取り付けられ、前記塊状栄養蓄積部から伸びる茎の先端が通過する位置に開口部を有し、前記植物の地下部が成長する地下空間と前記植物の地上部が成長する地上空間とを仕切る遮光性の仕切り部と、前記仕切り部の一部を構成し、前記開口部の内周面と前記茎との間に隙間が存在する状態から前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ変化し得る遮光性の絞り機構と、前記絞り機構の状態を変化させるように前記絞り機構を駆動する駆動部と、前記塊状栄養蓄積部から伸びる茎の先端が前記開口部を通過した場合に、前記駆動部を制御することによって、前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ前記絞り機構を変化させる制御部と、を備えている。
本発明の第2の態様の水耕栽培装置は、植物の塊状栄養蓄積部を収容するように構成された遮光性の栽培槽と、前記栽培槽に取り付けられ、前記塊状栄養蓄積部から伸びる茎の先端が通過する位置に開口部を有し、前記植物の地下部が成長する地下空間と前記植物の地上部が成長する地上空間とを仕切る遮光性の仕切り部と、前記塊状栄養蓄積部から伸びる茎の先端が前記開口部を通過した場合に、前記茎と前記開口部との間の隙間を塞ぐように、前記仕切り部の上面上で前記茎を取り囲む遮光性の閉塞構造体と、を備え、前記閉塞構造体は、前記茎の外周面に接触しながら前記茎を取り囲んだ状態で、前記茎の形状に応じて弾性変形する弾性部材を含む。
本発明によれば、地上部が形成される前の地下部のみが存在する段階から植物を水耕栽培装置内で栽培することができ、かつ、地上部が形成された後の必要な時期に地下部への光の照射を防止することができる。
以下、図面を参照しながら、実施の形態の水耕栽培装置を説明する。以下の複数の実施の形態においては、同一の参照符号が付された部分同士は、図面上における形状に多少の相違があっても、特段の記載がない限り、互いに同一の機能を発揮するものとする。
以下に説明される各実施の形態の水耕栽培装置は、根菜類を栽培するためのものである。根菜類は、地下部に塊状栄養蓄積部を形成する。塊状栄養蓄積部は、具体的には、塊茎、塊根、ならびにその他の水分および栄養分を蓄えることによって肥大した部分を意味する。塊茎を有する根菜類は、ジャガイモまたはこんにゃく等であり、塊根を有する根菜類は、サツマイモまたはダリア等である。本実施の形態においては、塊状栄養蓄積部は、ジャガイモの塊茎である。
(実施の形態1)
以下、図1〜図6を用いて、実施の形態1の水耕栽培装置10を説明する。まず、図1〜図4を用いて、本実施の形態の水耕栽培装置10の構成を説明する。
以下、図1〜図6を用いて、実施の形態1の水耕栽培装置10を説明する。まず、図1〜図4を用いて、本実施の形態の水耕栽培装置10の構成を説明する。
(水耕栽培装置の全体構成)
図1〜図4に示されるように、本実施の形態の水耕栽培装置10は、根菜類を栽培するための養液100を貯留する栽培槽1と、栽培槽1の上端に取り付けられた上部構造体6とを備えている。
図1〜図4に示されるように、本実施の形態の水耕栽培装置10は、根菜類を栽培するための養液100を貯留する栽培槽1と、栽培槽1の上端に取り付けられた上部構造体6とを備えている。
栽培槽1は、その断面が凹形である、いわゆる水槽のような構造を有している。栽培槽1は、光を透過させない非透光性部材によって構成されている。したがって、栽培槽1は、その上端の開口以外の部分においては、完全に光を遮断する構造を有している。一方、本実施の形態の水耕栽培装置10においては、上部構造体6は、その断面が凹形を上下逆にした形状を有している。上部構造体6は、その内側の空間へ光を透過させない非透光部材によって構成されている。そのため、栽培槽1と上部構造体6とは、1つの密閉された遮光空間を構成している。したがって、上部構造体6の内部空間に照明部7が設置されている。しかしながら、上部構造体6が光を透過させる透光性部材によって構成されている場合には、照明部7は、上部構造体6の外部空間に設置されていてもよく、また、人工光源を設置することなく、太陽光が光源として用いられてもよい。
(他の例の水耕栽培装置の構全体成)
本実施の形態の水耕栽培装置10は、上部構造体6以外の部分が、ある程度の気密性が保持され、かつ、外部からの光の進入が遮断された内部空間を内包する筐体(ハウジング)内に設けられたものであってもよい。筐体は、開閉可能な扉を備えている。植物20の栽培をする栽培者は、扉を開閉することにより、筐体の内部へ入ったり、筐体から外部へ出たりする。したがって、太陽光は、筐体によって遮られているため、植物20には照射されない。この場合、地上空間12は、筐体内の空間である。照明部7は、筐体内に設置されている。
本実施の形態の水耕栽培装置10は、上部構造体6以外の部分が、ある程度の気密性が保持され、かつ、外部からの光の進入が遮断された内部空間を内包する筐体(ハウジング)内に設けられたものであってもよい。筐体は、開閉可能な扉を備えている。植物20の栽培をする栽培者は、扉を開閉することにより、筐体の内部へ入ったり、筐体から外部へ出たりする。したがって、太陽光は、筐体によって遮られているため、植物20には照射されない。この場合、地上空間12は、筐体内の空間である。照明部7は、筐体内に設置されている。
(水耕栽培装置の各部の構成)
図1〜図4に示されるように、遮光性の栽培槽1は、植物20の塊状栄養蓄積部20aを収容するように構成されている。栽培槽1の底面上には、載置台9が置かれている。載置台9上には、本実施の形態の水耕栽培装置10によって栽培される根菜類の塊状栄養蓄積部20aが置かれている。栽培槽1内には、植物20に栄養を与えるための養液100が貯留されている。養液100は、載置台9の上面よりも低い位置まで栽培槽1内に貯留されている。塊状栄養蓄積部20aから伸びる根20cが養液100に浸されている。植物20は、根20cから養液100を吸収する。
図1〜図4に示されるように、遮光性の栽培槽1は、植物20の塊状栄養蓄積部20aを収容するように構成されている。栽培槽1の底面上には、載置台9が置かれている。載置台9上には、本実施の形態の水耕栽培装置10によって栽培される根菜類の塊状栄養蓄積部20aが置かれている。栽培槽1内には、植物20に栄養を与えるための養液100が貯留されている。養液100は、載置台9の上面よりも低い位置まで栽培槽1内に貯留されている。塊状栄養蓄積部20aから伸びる根20cが養液100に浸されている。植物20は、根20cから養液100を吸収する。
水耕栽培装置10は、遮光性の栽培槽1に加えて、遮光性の仕切り部2を備えている。ただし、栽培槽1および仕切り部2のいずれも、遮光性を有する一体構造物の一部であってもよい。仕切り部2は、その上面に遮光性塗料が塗布された平板状の部材である。仕切り部2は、栽培槽1の開口を塞ぐように、栽培槽1の上端部に設置されている。遮光性の仕切り部2は、植物20の地下部21が成長する地下空間11と植物20の地上部22が成長する地上空間12とを仕切り、光が地上空間12から地下空間11へ到達することを抑制する。ただし、仕切り部2は、その一部において、後述される駆動部3の下側部分と一体化されている。いずれにしても、仕切り部2と駆動部3とは、地下空間11への光の進入を妨げるように機能している。
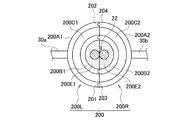
水耕栽培装置10は、絞り機構102、制御部4、センサ5、および駆動部3を備えている。絞り機構102は、仕切り部2の一部を構成し、遮光性を有している。絞り機構102は、カメラのレンズの絞り機構と同様の構造を有している。センサ5は茎20bを検出するためのものである。駆動部3は、制御部4からの信号を受け、絞り機構102の後述されるシャッタの開閉動作をさせるためのモータ等である。駆動部3は、左側の駆動部3aと右側の駆動部3bとに分けて設けられているが、カメラの絞り機構のシャッタの開閉動作と同様の開閉動作を絞り機構102にさせることができるのであれば、いかなる構造を有していてもよい。左側の駆動部3aと右側の駆動部3bとは、それぞれ、制御部4からの指令信号を受けて、後述される複数のシャッタに開閉動作をさせる。制御部4は、センサ5が茎20bを検出した場合に、駆動部3を制御し、それにより、駆動部3によって絞り機構102を開状態から閉状態へ変化させる。
具体的には、絞り機構102は、開口部2aの内周面と茎20bとの間に隙間が存在する状態から開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ変化し得る。制御部4は、塊状栄養蓄積部20aから伸びる茎20bの先端が開口部2aを通過した場合に、駆動部3を制御することによって、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を変化させる。そのため、光が地下部21に到達することを抑制することができる。その結果、光が地下部21に照射されてしまうことに起因して植物20の成長に悪影響が与えられることを抑制することができる。
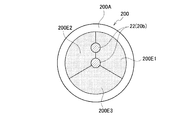
図2に示されるように、絞り機構102は、複数の平板状のシャッタ102a,102b,102c,102d,102e,102f,102g,102hを含んでいる。複数の平板状のシャッタ102a,102b,102c,102d,102e,102f,102g,102hは、それぞれ、複数の柔軟性部材103a,103b,103c,103d,103e,103f,103g,103hを有している。複数の柔軟性部材103a〜103hは、それぞれ、複数の平板状のシャッタ102a〜102hの内側の先端部を構成している。ただし、絞り機構102は、開口部2aを小さくすることにより、開口部2aの内周面と茎20bの外周面との間の隙間を塞ぐことができる構造であれば、いかなる構造を有していてもよい。
絞り機構102は、図2に示される開状態から図4に示される閉状態へ変化する。図4から分かるように、複数の柔軟性部材103a,103b,103c,103d,103e,103f,103g,103hは、植物20の茎20bに接触し、茎20bの形状に応じて弾性変形する。そのため、茎20bが損傷することが防止されている。複数の平板状のシャッタ102a,102b,102c,102d,102e,102f,102g,102hは、図4に示される閉状態で、平面視において互いに重なり合う部分を有している。そのため、光が地下空間11へ進入することが確実に防止されている。
また、図2および図4から分かるように、水耕栽培装置10は、柔軟性部材103a内に、茎20bに接触したことを検出する検出部104を備えている。制御部4は、開口部2aの内周面と茎20bの外周面とが接触したことを検出部104が検出した場合に、絞り機構102の動作を停止させるように、駆動部3を制御する。そのため、茎20bを損傷させるおそれを低減することができる。
ただし、水耕栽培装置10は、開口部2aの内周面と茎20bの外周面とが接触しているときの接触圧を検出する圧力測定部105を備えていてもよい。この場合、制御部4は、圧力測定部105によって検出された接触圧が所定値以下になるように、駆動部3に絞り機構102を駆動させる。これによっても、茎20bを損傷させるおそれを低減することができる。
本実施の形態においては、検出部104および圧力測定部105は、いずれも、ワイヤを流れる電流の変化から読み取られる柔軟性部材103aの変形度合から茎20bにかかっている力を推定するひずみゲージであるものとする。ただし、検出部104および圧力測定部105は、それぞれの目的を達成できるのであれば、いかなるものであってもよい。
本実施の形態においては、センサ5は、地上空間12に設けられ、茎20bの先端が仕切り部2の開口部2aを通過したことを検出する。制御部4は、茎20bの先端が仕切り部2の開口部2aを通過したことをセンサ5が検出した場合に、絞り機構102を開状態(図2)から閉状態(図4)へ変化させるように、駆動部3を制御する。
センサ5は、発光素子5aと受光素子5bとにより、茎20bの先端が仕切り部2の開口部2aを通過したたこと検出する。具体的には、発光素子5aが発する光が茎20bによって遮られることによって、受光素子5bが発光素子5aから光を受け取らなくなった場合に、茎20bが開口部2aを通過したことが検出される。ただし、センサ5は、茎20bの先端が仕切り部2の開口部2aを通過したことを検出することができるものであれば、いかなるセンサであってもよい。
本実施の形態においては、植物20は、茎20bの先端が塊状栄養蓄積部20aから伸びている状態で、栽培槽1内の地下空間11に収容される。この状態では、図1に示されるように、照明部7が発する光は、開口部2aを通じて、地下空間11へ進入する。その後、茎20bの先端が開口部2aを通過し、センサ5によって検出されると、図3に示されるように、絞り機構102が閉じられる。それにより、図4に示されるように、複数の柔軟性部材103a,103b,103c,103d,103e,103f,103g,103hの内側の面は、それぞれ、茎20bの外周面に接触する。
以上のような本実施の形態の水耕栽培装置10によれば、図3および図4に示されるように、茎20bの先端が仕切り部2の開口部2aを通過した場合には、仕切り部2を構成する絞り機構102を閉じることによって、開口部2aを塞ぐことができる。そのため、地下部21まで到達する光の量を極めて少なくすることができる。その結果、光が地下部21に照射されてしまうことに起因して植物20の成長に悪影響が与えられることを防止することができる。
本実施の形態においては、水耕栽培装置10は、上記の構成に加えて、地上空間12において点灯することにより、地上部22に光を照射する照明部7を備えている。したがって、制御部4は、茎20bの先端が仕切り部2を通過するまでの期間においても、照明部7を点灯している。これによれば、一般に茎20bは光へ向かって伸びる性質を有しているため、開口部2aが多少小さくても、茎20bは開口部2aを通過するように伸長する。
実施の形態1の水耕栽培装置10は、上記の構成に加えて、植物20の栽培者が操作し得る操作部8を備えている。制御部4は、操作部8に対して所定の操作がなされたことに基づいて、茎20bの先端が仕切り部2の開口部2aを通過したとみなし、駆動部3に絞り機構102を閉じさせる制御を実行することができる。そのため、栽培者が絞り機構102を閉じるタイミングを決定することができる。たとえば、センサ5の不具合が原因で、茎20bの先端が仕切り部2の開口部2aを通過しているにも関わらず、絞り機構102が閉じられない場合がある。この場合に、栽培者の判断で、絞り機構102を閉じることができる。
次に、図5を参照しながら、実施の形態1の水耕栽培装置10の制御部4において実行される孔閉塞処理1を説明する。
まず、ステップS1において、制御部4は、水耕栽培装置10による栽培が開始されたか否かを判定する。水耕栽培が開始されたか否かは、制御部4が操作部8から水耕栽培を開始することを指示する指令信号を受け取ったか否かによって判定される。具体的には、栽培者が水耕栽培の開始を制御部4に知らせるためのスイッチ等を操作したことにより、操作部8は、水耕栽培を開始することを指示する指令信号を制御部4へ送信する。それにより、制御部4は、その指令信号を受けとったときに、水耕栽培が開始されたことを認識する。したがって、栽培者が水耕栽培の開始のための操作を操作部8に対してしなければ、制御部4は、水耕栽培が開始されたと認識しない。そのため、ステップS1において、水耕栽培装置10による栽培が開始されたと判定されるまで、制御部4は、ステップS1の処理を繰り返す。
一方、ステップS1において、水耕栽培装置10による栽培が開始されたと判定されると、ステップS2において、照明部7を点灯させる。これにより、照明部7が発する光は、地上空間12から開口部2aを通じて地下空間11へ進入する。そのため、植物20の茎20bは、光に向かって、すなわち、開口部2aに向かって伸長する。
次に、ステップS3において、制御部4は、センサ5が茎20bの先端を検出したか否かを判定する。ステップS3において、センサ5が茎20bの先端を検出したと判定されなければ、ステップS4の処理が実行される。
ステップS4において、制御部4は、駆動部3に絞り機構102に閉じさせることを指示するための所定の操作が操作部8に対してなされたか否かを判定する。仕切り部2を駆動することを指示するための所定の操作が仕切り部2に対してなされたか否かは、制御部4が操作部8から駆動部3に絞り機構102を閉じさせることを指示する指令信号を受け取ったか否かによって判定される。ステップS4において、駆動部3に絞り機構102を閉じさせることを指示するための所定の操作が操作部8に対してなされたと判定されなければ、制御部4は、ステップS3およびステップS4の処理を繰り返す。
ステップS3において、センサ5が茎20bの先端を検出したか、または、ステップS4において、駆動部3に絞り機構102に閉じさせることを指示するための所定の操作が操作部8に対してなされたと判定される場合がある。この場合、ステップS5において、制御部4は、駆動部3に絞り機構102を閉じさせる制御を実行する。
ステップS5においては、制御部4は、開口部2aの内周面と茎20bの外周面とが接触したことを検出部104が検出した場合に、絞り機構102の動作を停止させる。また、水耕栽培装置10が開口部2aの内周面と茎20bの外周面とが接触しているときの接触圧を検出する圧力測定部105を備えている場合がある。この場合には、制御部4は、圧力測定部105によって検出された接触圧が所定値以下になるように絞り機構102を制御する。これらの制御によって、茎20bの損傷が防止される。
なお、水耕栽培装置10は、検出部104または圧力測定部105を備えていない場合には、ステップS5において、検出部104または圧力測定部105に関する処理を行わない。
その後、ステップS6において、制御部4は、栽培を終了すべきタイミングであるか否かを判定する。ステップS6において、制御部4は、栽培を終了すべきタイミングであると判定されなければ、その状態を維持する。一方、ステップS6において、栽培を終了すべきタイミングであると判定されると、ステップS7において、制御部4は、照明部7を消灯する。その後、ステップS8において、制御部4は、駆動部3に絞り機構102を開かせる。これにより、水耕栽培装置10は、水耕栽培を終了した状態になる。
(実施の形態2)
以下、図6および図7を用いて、実施の形態2の水耕栽培装置10を説明する。
以下、図6および図7を用いて、実施の形態2の水耕栽培装置10を説明する。
本実施の形態の水耕栽培装置10の構造および制御は、実施の形態1の水耕栽培装置の構造および制御とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態1の水耕栽培装置10と異なっている。
まず、図6を用いて、本実施の形態の水耕栽培装置10の構成を説明する。
図6に示されるように、本実施の形態の水耕栽培装置10は、地上空間12に設けられ、仕切り部2の開口部2aを通過した茎20bの先端の画像データを取得することができるように配置された撮像部15を備えている。制御部4は、撮像部15によって取得された画像データに基づいて茎20bの先端が仕切り部2の開口部2aを通過したか否かを判定する判定部4aを含んでいる。また、制御部4は、茎20bの先端が仕切り部2の開口部2aを通過したと判定部4aが判定した場合に、駆動部3に絞り機構102を閉じさせる制御を実行する。この構成によっても、実施の形態1の水耕栽培装置10と同様に、茎20bの先端が仕切り部2の開口部2aを通過した状態で、絞り機構102を閉じることができる。
茎20bの先端が仕切り部2の開口部2aを通過したか否かは、撮像部15によって取得された画像データにおける茎20bの色または形状等によって判定されてもよい。ただし、茎20bの先端が仕切り部2の開口部2aを通過したことを特定できるのであれば、判定部4aは、いかなる画像データ処理を用いて茎20bの先端が仕切り部2の開口部2aを通過したと判定してもよい。
次に、図7を参照しながら、実施の形態2の水耕栽培装置10の制御部4において実行される孔閉塞処理2を説明する。
本実施の形態の孔閉塞処理2は、ステップS3の代わりにステップS3aが実行される点において、実施の形態1の孔閉塞処理1と異なる。その他の点においては、本実施の形態の孔閉塞処理2と実施の形態1の孔閉塞処理1とは同一である。
ステップS3aにおいては、制御部4は、センサ5によって茎20bの先端が検出されたか否かを判定するのではなく、撮像部15によって取得されている画像データに茎20bの先端と認識されるものがあるのか否かを判定する。これにより、茎20bの先端が仕切り部2の開口部2aを通過したか否かを判定する。
(実施の形態3)
以下、図8および図9を用いて、実施の形態3の水耕栽培装置10を説明する。
以下、図8および図9を用いて、実施の形態3の水耕栽培装置10を説明する。
本実施の形態の水耕栽培装置10の構造および制御は、実施の形態1の水耕栽培装置の構造および制御とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態1の水耕栽培装置10と異なっている。
まず、図8を用いて、本実施の形態の水耕栽培装置10の構成を説明する。
図8に示されるように、制御部4は、時間を計時するタイマ4bを含んでいる。制御部4は、タイマ4bが所定の時間を計時したことに基づいて、茎20bの先端が仕切り部2の開口部2aを通過したとみなし、駆動部3に絞り機構102を閉じさせる制御を実行する。この構成によれば、上記のようなセンサ5または撮像部15等の構成を設けることなく、絞り機構102を閉じることができる。
次に、図9を参照しながら、実施の形態3の水耕栽培装置10の制御部4において実行される孔閉塞処理3を説明する。
図9に示されるように、本実施の形態の孔閉塞処理3は、ステップS3の代わりにステップS3bが実行される点において、実施の形態1の孔閉塞処理と異なる。その他の点においては、本実施の形態の孔閉塞処理3と実施の形態1の孔閉塞処理1とは同一である。
ステップS3bにおいては、センサ5によって茎20bの先端が検出されたか否かを判定するのではなく、タイマ4bによって計時されている時間が所定の時間を計時したか否かを判定する。これにより、茎20bの先端が仕切り部2の開口部2aを通過したか否かを判定する。タイマ4bは、たとえば、水耕栽培を開始することを指示するための操作が操作部8に対してなされた場合に計時を開始するものとする。
タイマ4bの計時の開始はいかなるタイミングであってもよい。また、前述の所定時間もいかなる長さであってもよい。この所定時間は、予め行われた植物20の育成実験によって求められている。
(絞り機構の他の例)
絞り機構102は、図10に示されるように、平面視において三角形の内周面を有する開口部2aを構成する3枚の平板状のシャッタ102a,102b,102cを備えていてもよい。シャッタ102a,102b,102cのうちの隣接するシャッタの一部同士は、カメラのレンズの絞り機構と同様に、互いに平面視において重なっている。この場合、シャッタ102a,102b,102cは、それぞれ、その内側の先端に柔軟性部材103a,103b,103cを有している。この図10に示される絞り機構102が閉じられると、図11に示されるように、柔軟性部材103a,103b,103cと茎20bとの間の隙間が閉塞された状態が形成される。
絞り機構102は、図10に示されるように、平面視において三角形の内周面を有する開口部2aを構成する3枚の平板状のシャッタ102a,102b,102cを備えていてもよい。シャッタ102a,102b,102cのうちの隣接するシャッタの一部同士は、カメラのレンズの絞り機構と同様に、互いに平面視において重なっている。この場合、シャッタ102a,102b,102cは、それぞれ、その内側の先端に柔軟性部材103a,103b,103cを有している。この図10に示される絞り機構102が閉じられると、図11に示されるように、柔軟性部材103a,103b,103cと茎20bとの間の隙間が閉塞された状態が形成される。
絞り機構102は、図12に示されるように、四角形の開口部2aを構成するように、4枚の平板状のシャッタ102a,102b,102c,102dを備えていてもよい。シャッタ102a,102b,102c,102dのうちの隣接するシャッタの一部同士は、カメラのレンズの絞り機構と同様に、互いに平面視において重なっている。この場合、シャッタ102a,102b,102c,102dは、それぞれ、その先端に柔軟性部材103a,103b,103c,103dを有している。この図12に示される絞り機構102が閉じられると、図13に示されるように、柔軟性部材103a,103b,103c,103dと茎20bとの間の隙間が閉塞された状態が形成される。
要するに、絞り機構102は、3以上のシャッタを有していればよい。前述の3以上のシャッタは、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態で、平面視において互いに重なるように配置されている。そのため、カメラの絞り機構と同様の原理で、光が地上空間12から地下空間11へ進入することを確実に抑制することができる。
上記した絞り機構102は、いずれも、茎20bと接触する柔軟性部材を有しているが、複数枚のシャッタと茎20bとの間に許容されない程度の大きさの隙間が形成されないのであれば、柔軟性部材を有していなくてもよい。たとえば、シャッタの枚数が多ければ、複数枚のシャッタと茎20bとの間の隙間は極めて小さいため、シャッタの先端の柔軟性部材を必要としない場合がある。
(実施の形態4)
以下、図14〜図18を用いて、実施の形態4の水耕栽培装置10を説明する。
以下、図14〜図18を用いて、実施の形態4の水耕栽培装置10を説明する。
本実施の形態の水耕栽培装置10の構造および制御は、実施の形態1の水耕栽培装置の構造および制御とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態1の水耕栽培装置10と異なっている。
図14に示されるように、本実施の形態の水耕栽培装置10においては、実施の形態1の絞り機構102の代わりに、閉塞構造体200および移動機構30が用いられる。
閉塞構造体200は、塊状栄養蓄積部20aから伸びる茎20bの先端が開口部2aを通過した場合に、茎20bと開口部2aとの間の隙間を塞ぐように、仕切り部2上で茎20bを取り囲む。閉塞構造体200は、遮光性を有している。実施の形態1〜3においては、開口部2aは、絞り機構102の内周面であるため、移動可動な部分であったが、本実施の形態においては、図14に示されるように、開口部2aは、仕切り部2に形成された貫通孔であるため、その位置が固定された部分である。閉塞構造体200は、茎20bと開口部2aとの間の隙間を塞ぐために用いられる。
移動機構30は、閉塞構造体200が茎20bと開口部2aとの間の隙間を塞ぐように、閉塞構造体200を移動させる。本実施の形態においては、制御部4は、右側の駆動部3aおよび左側の駆動部3bからなる駆動部3を制御する。
図14および図15に示されるように、駆動部3は、左側の駆動部3aと右側の駆動部3bとを含んでいる。移動機構30は、左側の駆動部3aによって駆動される左側のプランジャ30aと右側の駆動部3bによって駆動される右側のプランジャ30bとを含んでいる。閉塞構造体200は、左側のプランジャ30aの先端に固定された左側の閉塞部品200Lと右側のプランジャ30bの先端に固定された右側の閉塞部品200Rとを含んでいる。左側の駆動部3aおよび右側の駆動部3bは、左側の閉塞部品200Lと右側の閉塞部品200Rとが茎20bを挟むように、左側のプランジャ30aおよび右側のプランジャ30bを互いに接近させる。
本実施の形態の水耕栽培装置10によっても、光が地下部21に到達することを抑制することができる。その結果、光が地下部21に照射されてしまうことに起因して植物20の成長に悪影響が与えられることを抑制することができる。
本実施の形態の閉塞構造体200は、茎20bの外周面に接触しながら茎20bを取り囲んだ状態で、茎20bの形状に応じて弾性変形する弾性部材200E1,200E2を含んでいる。そのため、茎20bを損傷させるおそれを低減することができる。弾性部材200E1,200E2は、たとえば、スポンジ(ウレタンフォーム)等である。スポンジであれば、水分を吸収するため、茎20bの表面に水分を与えることにより、茎20bの表面の水分不足の発生を防止することができる。弾性部材200E1,200E2は、茎20bの形状に応じて変形できるのであれば、ゴム等のいかなる弾性部材であってもよい。
閉塞構造体200は、図14および図15から分かるように、弾性部材200E1,200E2を取り囲む筒状部材を含んでいる。そのため、弾性部材200E1と弾性部材200E2との対向面同士の間に隙間が形成され難い。筒状部材は、外側の半割の筒状部材200A1,200A2、内側の半割の筒状部材200B1,200B2、および連結部200C1,200C2を含んでいる。外側の半割の筒状部材200A1,200A2は、開口部2aの外側の仕切り部2上に設置されている。内側の半割の筒状部材200B1,200B2は、外側の半割の筒状部材200A1,200A2の内側に設けられ、弾性部材200E1,200E2を保持している。連結部200C1,200C2は、リングを2等分した円弧形状を有している。連結部200C1,200C2は、内側の半割の筒状部材200B1,200B2と外側の半割の筒状部材200A1,200A2とを連結している。連結部200C1,200C2は、それぞれ、内側の筒状部材200B1,200B2と外側の半割の筒状部材200A1,200A2との間の隙間を完全に閉塞している。
図15に示されるように、前述の閉塞構造体200によれば、茎20bに不要な力を与えることなく、開口部2aと茎20bとの間の隙間を塞ぐことができる。そのため、植物20を栽培しているときに、地下部21まで光が到達してしまうことを防止することができる。その結果、光が地下部21に照射されてしまうことに起因して植物20の成長に悪影響を与えることを抑制することができる。また、閉塞構造体200は、光を通過させないように互いに連結された二重の筒状部材によって構成さているため、その外形を大きくすることができる。したがって、茎20bが地上空間12へ到達し易いように開口部2aのサイズを大きくしても、開口部2aを容易に塞ぐことができる。また、閉塞構造体200の外形が大きくても、弾性部材200E1,200E2の平面視におけるサイズを小さくすることができる。そのため、弾性部材200E1,200E2の対向面が水平方向に伸びる距離を短くすることができる。したがって、弾性部材200E1,200E2同士の間に隙間が形成されてしまうおそれが低減されている。
なお、図15においては、2本の茎20bがそれぞれ凹んだ弾性部材200E1,200E2内に嵌り込んでいる。しかしながら、後述される図23および図24に示されるように、2本の茎20bが弾性部材200E1,200E2の対向面同士の間に沿って並んでいることも考えられる。いずれにしても、2本の茎20bと弾性部材200E1,200E2との間の隙間が、許容されない程度まで大きくならなければよい。
図16に示されるように、図15に示される閉塞構造体200における連結部200C1,200C2の代わりに、弾性体200D1,200D2が設けられていてもよい。弾性体200D1,200D2は、それぞれ、外側の半割の筒状部材200A1,200A2と内側の半割の筒状部材200B1,200B2とを連結する。これによれば、内側の半割の筒状部材200B1,200B2は、茎20bの位置に対応して、外側の半割の筒状部材200A1,200A2に対する相対的な位置を変化させることができる。つまり、内側の半割の筒状部材200B1,200B2は、弾性体200D1,200D2の弾性変形を利用して、茎20bの位置に応じて移動することができる。したがって、茎20bにかかる負担を低減することができる。
図17に示されるように、本実施の形態の水耕栽培装置10は、実施の形態1の水耕栽培装置10と同様に、地上空間12に設けられ、茎20bの先端が開口部2aを通過したことを検出するセンサ5を備えている。そのため、制御部4は、茎20bの先端が開口部2aを通過したことをセンサ5が検出した場合に、駆動部3を制御することにより、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。それにより、左側のプランジャ30aに連結された左側の閉塞部品200Lと右側のプランジャ30bに連結された右側の閉塞部品200Rとが接近する。これによれば、茎20bの先端が開口部2aを通過した場合に、閉塞構造体200に仕切り部2上で茎20bの外周面に接触しながら茎20bを自動的に取り囲ませることができる。
本実施の形態の水耕栽培装置10は、実施の形態1の水耕栽培装置10と同様に、栽培者が操作する操作部8を備えている。そのため、制御部4は、操作部8に対して所定の操作がなされたことに基づいて、茎20bの先端が開口部2aを貫通したとみなす。それにより、制御部4は、駆動部3を制御することにより、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。そのため、植物20の栽培者は閉塞構造体200に茎20bの外周面を取り囲ませるタイミングを決定することができる。
本実施の形態の水耕栽培装置10においては、実施の形態1の水耕栽培装置10と同様に、制御部4は、閉塞構造体200が茎20bの周囲を取り囲むように閉塞構造体200を移動させる前の状態において、照明部7を点灯させる。茎20bは、一般に、光の方向へ向かって伸びる性質を有している。そのため、上記の構成によれば、開口部2aから地下空間11へ漏れる光によって、茎20bの先端が開口部2aに向かって伸びるように誘導される。
次に、図18を参照しながら、実施の形態3の水耕栽培装置10の制御部4において実行される孔閉塞処理4を説明する。
図18に示されるように、本実施の形態の孔閉塞処理4は、ステップS5およびステップS8の代わりにステップS5aおよびステップS8aが実行される点において、実施の形態1の孔閉塞処理と異なる。その他の点においては、本実施の形態の孔閉塞処理2と実施の形態1の孔閉塞処理1とは同一である。
ステップS5aにおいては、制御部4は、駆動部3を駆動する。それにより、駆動部3は、その駆動力によって、茎20bと閉塞構造体200との間に隙間が形成されている状態から閉塞構造体200が茎20bを取り囲む状態へ変化するように、閉塞構造体200を移動機構30に移動させる。具体的には、制御部4は、プランジャ30aとプランジャ30bとを互いに接近させる。それにより、制御部4は、左側の閉塞部品200Lと右側の閉塞部品200Rとに茎20bを挟ませる。
ステップS8aにおいては、制御部4は、閉塞構造体200が茎20bを取り囲む状態から茎20bと閉塞構造体200との間に隙間が形成されるように、駆動部3の駆動力によって閉塞構造体200を移動機構30に移動させる。具体的には、制御部4は、プランジャ30aとプランジャ30bとを互いに引き離す。
(実施の形態5)
以下、図19および図20を用いて、実施の形態5の水耕栽培装置10を説明する。
以下、図19および図20を用いて、実施の形態5の水耕栽培装置10を説明する。
本実施の形態の水耕栽培装置10の構造および制御は、実施の形態4の水耕栽培装置の構造および制御とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態4の水耕栽培装置10と異なっている。
本実施の形態においては、水耕栽培装置10は、撮像部15を備えている。制御部4は、撮像部15によって取得された画像データに基づいて茎20bの先端が開口部2aを貫通したか否かを判定する判定部4aを含んでいる。制御部4は、茎20bの先端が開口部2aを貫通したと判定部4aが判定した場合に、駆動部3を駆動する。それにより、駆動部3は、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。具体的には、制御部4は、茎20bが左側の閉塞部品200Lと右側の閉塞部品200Rとによって挟まれるように、左側の駆動部3aおよび右側の駆動部3bにプランジャ30aおよびプランジャ30bを互いに接近させる。この構成によっても、茎20bの先端が開口部2aを通過した場合に、閉塞構造体200に仕切り部2上で茎20bの外周面に接触しながら茎20bを自動的に取り囲ませることができる。
次に、図20を参照しながら、実施の形態2の水耕栽培装置10の制御部4において実行される孔閉塞処理5を説明する。
本実施の形態の孔閉塞処理5は、ステップS3の代わりにステップS3aが実行される点において、実施の形態4の孔閉塞処理4と異なる。その他の点においては、本実施の形態の孔閉塞処理5と実施の形態4の孔閉塞処理4とは同一である。
ステップS3aにおいては、制御部4は、センサ5によって茎20bの先端が検出されたか否かを判定するのではなく、撮像部15によって取得されている画像データに茎20bの先端と認識されるものがあるのか否かを判定する。これにより、茎20bの先端が仕切り部2の開口部2aを通過したか否かを判定する。
(実施の形態6)
以下、図21および図22を用いて、実施の形態6の水耕栽培装置10を説明する。
以下、図21および図22を用いて、実施の形態6の水耕栽培装置10を説明する。
本実施の形態の水耕栽培装置10の構造および制御は、実施の形態4の水耕栽培装置の構造および制御とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態4の水耕栽培装置10と異なっている。
本実施の形態においては、制御部4は、時間を計時するタイマ4bを含んでいる。制御部4は、タイマ4bが所定の時間を計時したことに基づいて、茎20bの先端が開口部2aを貫通したとみなす。それにより、制御部4は、駆動部3を制御することにより、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。具体的には、制御部4は、左側の駆動部3aおよび右側の駆動部3bを駆動して、左側の閉塞部品200Lと右側の閉塞部品200Rとによって茎20bが挟まれるように、左側のプランジャ30aと右側のプランジャ30bとを互いに接近させる。
次に、図22を参照しながら、実施の形態6の水耕栽培装置10の制御部4において実行される孔閉塞処理6を説明する。
図22に示されるように、本実施の形態の孔閉塞処理6は、ステップS3の代わりにステップS3bが実行される点において、実施の形態1の孔閉塞処理と異なる。その他の点においては、本実施の形態の孔閉塞処理6と実施の形態4の孔閉塞処理4とは同一である。
ステップS3bにおいては、センサ5によって茎20bの先端が検出されたか否かを判定するのではなく、タイマ4bによって計時されている時間が所定の時間を計時したか否かを判定する。これにより、茎20bの先端が仕切り部2の開口部2aを通過したか否かを判定する。タイマ4bは、たとえば、水耕栽培を開始することを指示するための操作が操作部8に対してなされた場合に計時を開始するものとする。
ただし、タイマ4bの計時の開始はいかなるタイミングであってもよい。また、前述の所定時間はいかなる長さであってもよい。この所定時間は、予め行われた実験によって求められる。
(閉塞構造体の他の例)
図23に示されるように、実施の形態4〜6の水耕栽培装置10において使用される閉塞構造体200は、プランジャ30aに固定された弾性部材200E1とプランジャ30bに固定された弾性部材200E2とによって構成されていてもよい。つまり、左側の閉塞部品200Lが弾性部材E1のみによって構成されており、右側の閉塞部品200Rが弾性部材E2のみによって構成されていてもよい。これによれば、極めて簡単な構造で、閉塞構造体200を形成することができる。弾性部材200E1と弾性部材200E2とは、いずれも、円柱部材が回転中心軸を含む平面に沿って切られた形状を有している。しかしながら、弾性部材200E1および弾性部材200E2は、互いに接触するように移動し、地上部22すなわち茎20bを挟むことができる形状であれば、いかなる形状であってもよい。また、弾性部材200E1および弾性部材200E2は、茎20bの形状に応じて弾性変形し、それらと茎20bとの間の隙間が許容できない程度の大きさにならないように構成されていれば、いかなる構造を有していてもよい。
図23に示されるように、実施の形態4〜6の水耕栽培装置10において使用される閉塞構造体200は、プランジャ30aに固定された弾性部材200E1とプランジャ30bに固定された弾性部材200E2とによって構成されていてもよい。つまり、左側の閉塞部品200Lが弾性部材E1のみによって構成されており、右側の閉塞部品200Rが弾性部材E2のみによって構成されていてもよい。これによれば、極めて簡単な構造で、閉塞構造体200を形成することができる。弾性部材200E1と弾性部材200E2とは、いずれも、円柱部材が回転中心軸を含む平面に沿って切られた形状を有している。しかしながら、弾性部材200E1および弾性部材200E2は、互いに接触するように移動し、地上部22すなわち茎20bを挟むことができる形状であれば、いかなる形状であってもよい。また、弾性部材200E1および弾性部材200E2は、茎20bの形状に応じて弾性変形し、それらと茎20bとの間の隙間が許容できない程度の大きさにならないように構成されていれば、いかなる構造を有していてもよい。
閉塞構造体200は、図24に示されるように、左側のプランジャ30aに固定された左側の半割の筒状部材200A1と、右側のプランジャ30bに固定された右側の半割の筒状部材200A2とを備えていてもよい。つまり、左側の閉塞部品200Lが弾性部材E1と半割の筒状部材200A1とによって構成されており、右側の閉塞部品200Rが弾性部材E2と半割の筒状部材200A2とによって構成されていてもよい。この場合、半割の筒状部材200A1の内側に弾性部材200E1が固定され、半割の筒状部材200A2内側に弾性部材200E2が固定されている。これによれば、弾性部材200E1と弾性部材200E2とは、互いに茎20bを押しつけ合う。つまり、弾性部材200E1と弾性部材200E2とは、茎20bを挟む方向に広がろうとする。そのため、弾性部材200E1および弾性部材200E2は、それらと茎20bとの間の隙間をより確実に塞ぐことができる。
なお、図23および図24においては、2本の茎20bが弾性部材200E1,200E2の対向面同士の間に沿って並んでいるが、図15および図16に示されるように、2本の茎20bがそれぞれ凹んだ弾性部材200E1,200E2に嵌り込んでいてもよい。
閉塞構造体200は、複数の弾性部材を有しており、それらの弾性部材が茎20bを挟み、それらの弾性部材と茎20bとの間の隙間を塞ぐことができるのであれば、いかなる構造を有していてもよい。また、弾性部材の数も、特に限定されていない。
(実施の形態7)
以下、図25〜図30を用いて、実施の形態7の水耕栽培装置10を説明する。
以下、図25〜図30を用いて、実施の形態7の水耕栽培装置10を説明する。
本実施の形態の水耕栽培装置10の構造および制御は、実施の形態5の水耕栽培装置の構造および制御とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態5の水耕栽培装置10と異なっている。
図25に示されるように、本実施の形態の水耕栽培装置10においては、移動機構30が、実施の形態5のプランジャ30a,30bの代わりに、2つのマニピュレータ50,150を有している。マニピュレータ150およびマニピュレータ50は、それぞれ、駆動部3aおよび駆動部3bによって駆動される。マニピュレータ50,150は、いずれも、いわゆるロボットアームと呼ばれ、人間の手に類似した作業をし得るものである。移動機構30としての2つのマニピュレータ50,150は、人間の左右の手と同様に、協働作業によって茎20bを弾性部材200E1と弾性部材200E2との間に挿入する。それにより、茎20bが弾性部材200E1,200E2の対向面同士の間を貫通することによって、弾性部材200E1,200E2が茎20bの外周面に接触しながら茎20bを取り囲んだ状態が形成される。
制御部4は、撮像部15が取得している画像データに基づいて駆動部3aおよび3bを制御する。それにより、制御部4は、マニピュレータ50および150によって、閉塞構造体200を図26に示される位置から図25に示される位置へ移動させる。具体的には、一方のマニピュレータ50は、茎20bの先端が開口部2aを通過した後、図26に示されるように、閉塞構造体200を挟持した状態で茎20bの上方へ移動する。他方のマニピュレータ150は、茎20bを所定の位置で保持する。一方のマニピュレータ50が、茎20bが弾性部材200E1と弾性部材200E2との境界面同士の間に挿入されるように、閉塞構造体200を下方へ移動させる。それにより、図25に示されるように、仕切り部2の開口部2aが閉塞構造体200によって塞がれ、かつ、弾性部材200E1,200E2と茎20bとの間の隙間が存在しない状態が形成される。
図27に示されるように、本実施の形態の閉塞構造体200は、弾性部材200E1と弾性部材200E2とが筒状部材200Aに挿入されることによって形成されている。植物20の茎20bは、弾性部材200E1と弾性部材200E2との対向面同士の間に、対向面同士を押し分けながら挿入される。これによれば、極めて簡単な構造で、閉塞構造体200を形成することができる。
図28に示されるように、本実施の形態の閉塞構造体200は、弾性部材200E1、弾性部材200E2、および弾性部材200E3が筒状部材200Aに挿入されることによって形成されたものであってもよい。
前述の弾性部材200E1,200E2または弾性部材200E1,200E2,200E3の形状は、筒状部材200Aの形状によって規定される。本実施の形態においては、円筒状の筒状部材200Aを用いているが、その代わりに角筒状の筒状部材内に複数の弾性部材が挿入された閉塞部材が用いられてもよい。また、弾性部材200E1,200E2または弾性部材200E1,200E2,200E3は、茎20bの形状に応じて弾性変形し、それらと茎20bとの間の隙間を塞ぐことができるように構成されていれば、いかなる形状を有していてもよい。弾性部材の対向面同士の間に茎20bが挿入されるのでれば、筒状部材内に保持される弾性部材の数はいつくであってもよい。
前述の筒状部材200Aは、複数の弾性部材が挿入され、複数の弾性部材を保持できるものであれば、格子または網目状態の材料が筒状に形成されたものであってもよい。
図29に示されるように、本実施の形態の閉塞構造体200は、1つの弾性部材200Eに上下方向に貫通する切れ込み200Xが設けられたものであってもよい。図29に示される構造においては、平面視において、直線上に切れ込み200Xが設けられている。この閉塞構造体200によれば、茎20bが弾性部材200Eの切れ込み200Xの対向面同士の間を貫通することによって、弾性部材200Eが茎20bの外周面に接触しながら茎20bを取り囲んだ状態が形成される。この構造であれば、閉塞構造体200を極めて簡単に形成することができる。
図30に示されるように、本実施の形態の閉塞構造体200は、1つの弾性部材200Eに上下方向に貫通する切れ込み200Xであって、平面視において、円の中心から3方向に伸びる直線状の切れ込み200Xが設けられたものであってもよい。これによっても、弾性部材200Eのみからなる簡単な構造で、閉塞構造体200を形成することができる。
図31に示されるように、本実施の形態の閉塞構造体200は、1つの平板状の弾性部材200Eが、渦巻き状に巻かれたものであってもよい。これによっても、茎20bが渦巻き状の弾性部材200Eの対向面同士の間を貫通することによって、弾性部材200Eが茎20bの外周面に接触しながら茎20bを取り囲んだ状態が形成される。弾性部材200Eは、輪ゴムまたは紐200Fで拘束されている。これによれば、1つの平板状の弾性部材200Eのみからなる簡単な構造で、閉塞構造体200を形成することができる。ただし、渦巻きを構成する各部分同士は茎20bが通過できるように固定されていない。
(実施の形態8)
本実施の形態の水耕栽培装置10の構造は、実施の形態7の水耕栽培装置の構造とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態7の水耕栽培装置10と異なっている。
本実施の形態の水耕栽培装置10の構造は、実施の形態7の水耕栽培装置の構造とほぼ同一であるので、その同一である部分の説明は繰り返さない。本実施の形態の水耕栽培装置10は、以下に説明する事項のみ、実施の形態7の水耕栽培装置10と異なっている。
実施の形態の水耕栽培装置10は、実施の形態7の水耕栽培装置10において、マニピュレータ50,150および撮像部15を有していない。本実施の形態の水耕栽培装置10を使用する場合、植物20の栽培者自身が茎20bの先端が仕切り部2の開口部2aを通過したことを目視によって発見する。
その後、栽培者は、一方の手で茎20bを掴んだ状態で、他方の手で掴まれた図27または図28に示される閉塞構造体200を茎20bに押し付ける。それにより、図25に示されるように、仕切り部2の開口部2aが閉塞構造体200によって塞がれ、かつ、弾性部材200E1,200E2と茎20bとの間の隙間が存在しない状態が形成される。
以下、本実施の形態の水耕栽培装置10の特徴的構成およびそれにより得られる効果を説明する。
(1) 水耕栽培装置10は、遮光性の栽培槽1、遮光性の仕切り部2、および遮光性の絞り機構102を備えている。遮光性の栽培槽1は、植物20の塊状栄養蓄積部20aを収容するように構成されている。遮光性の仕切り部2は、栽培槽1に取り付けられ、塊状栄養蓄積部20aから伸びる茎20bの先端が通過する位置に開口部2aを有し、植物20の地下部21が成長する地下空間11と植物20の地上部22が成長する地上空間12とを仕切る。遮光性の絞り機構102は、仕切り部2の一部を構成し、開口部2aの内周面と茎20bとの間に隙間が存在する状態から開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ変化し得る。駆動部3は、絞り機構102の状態を変化させるように絞り機構102を駆動する。制御部4は、塊状栄養蓄積部20aから伸びる茎20bの先端が開口部2aを通過した場合に、駆動部3を制御することによって、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を変化させる。この構成によれば、地上部22が形成される前の地下部21のみが存在する段階から植物20を水耕栽培装置10内で栽培することができ、かつ、地上部22が形成された後の必要な時期に地下部21への光の照射を防止することができる。その結果、光が地下部21に照射されてしまうことに起因して植物20の成長に悪影響が与えられることを抑制することができる。
(2) 絞り機構102は、3以上の平板状のシャッタ102a,102b,102c,102d,102e,102f,102g,102hを有していてもよい。この場合、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態で、前述の3以上の平板状のシャッタのうちの隣接するシャッタの一部同士が平面視において互いに重なるように配置されていることが好ましい。この構成によれば、カメラの絞り機構と同様の原理で、光が地上空間12から地下空間11へ進入することを抑制することができる。
(3) 絞り機構102は、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態で、茎20bの形状に応じて弾性変形する柔軟性部材103a〜103hを含んでいてもよい。この構成によれば、茎20bを損傷させるおそれを低減することができる。
(4) 水耕栽培装置10が茎20bに接触したことを検出する検出部104をさらに備えていてもよい。この場合、制御部4は、開口部2aの内周面と茎20bの外周面とが接触したことを検出部104が検出した場合に、絞り機構102の動作を停止させる。この構成によれば、茎20bを損傷させるおそれを低減することができる。
(5) 水耕栽培装置10が開口部2aの内周面と茎20bの外周面とが接触しているときの接触圧を検出する圧力測定部105をさらに備えていてもよい。この場合、制御部4は、圧力測定部105によって検出された接触圧が所定値以下になるように絞り機構102を制御する。この構成によっても、茎20bを損傷させるおそれを低減することができる。
(6) 水耕栽培装置10は、地上空間12に設けられ、茎20bの先端が開口部2aを通過したことを検出するセンサ5をさらに備えていてもよい。制御部4は、茎20bの先端が開口部2aを通過したことをセンサ5が検出した場合に、駆動部3を制御することにより、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を変化させてもよい。この構成によれば、茎20bの先端が開口部2aを通過した場合に、絞り機構102に開口部2aと茎20bとの間の隙間を自動的に閉塞させることができる。
(7) 水耕栽培装置10は、地上空間12に設けられ、開口部2aを貫通した茎20bの先端の画像データを取得する撮像部15をさらに備えていてもよい。この場合、制御部4は、撮像部15によって取得された画像データに基づいて茎20bの先端が開口部2aを貫通したか否かを判定する判定部4aを含んでいる。それにより、制御部4は、茎20bの先端が開口部2aを貫通したと判定部4aが判定した場合に、駆動部3を制御することにより、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を変化させる。この構成によっても、茎20bの先端が開口部2aを通過した場合に、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を自動的に変化させることができる。
(8) 制御部4は、時間を計時するタイマ4bを含んでいてもよい。この場合、制御部4は、タイマ4bが所定の時間を計時したことに基づいて、茎20bの先端が開口部2aを貫通したとみなす。それにより、制御部4は、駆動部3を制御することにより、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を変化させる。この構成によれば、センサ5および撮像部15等の構成を設けることなく、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を自動的に変化させることができる。
(9) 水耕栽培装置10は、栽培者が操作する操作部8をさらに備えていてもよい。この場合、制御部4は、操作部8に対して所定の操作がなされたことに基づいて、茎20bの先端が開口部2aを貫通したとみなす。制御部4は、駆動部3を制御することにより、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を変化させる。
上記の構成によれば、植物20の栽培者は開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を自動的に変化させるタイミングを決定することができる。また、センサ5、撮像部15、またはタイマ4bに何らかの不具合が生じている場合がある。この場合に、茎20bの先端が開口部2aを通過しているにも関わらず、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102が自動的に変化しないことがある。上記の構成によれば、前述の場合に、植物20の栽培者の判断で、開口部2aの内周面が茎20bの外周面に接触しながら茎20bを取り囲む状態へ絞り機構102を強制的に変化させることができる。
(10) 水耕栽培装置10は、地上空間12において点灯することにより、地上部22に光を照射する照明部7をさらに備えていてもよい。この場合、制御部4は、開口部2aの内周面と茎20bの外周面との間に隙間が存在する状態において、照明部7を点灯させる。茎20bは、一般に、光の方向へ向かって伸びる性質を有している。そのため、前述の構成によれば、開口部2aから地下空間11へ光が漏れることにより、茎20bを開口部2aまで誘導することができる。
(11) 水耕栽培装置10は、遮光性の栽培槽1、遮光性の仕切り部2、および遮光性の閉塞構造体200を備えている。遮光性の栽培槽1は、植物20の塊状栄養蓄積部20aを収容するように構成されている。遮光性の仕切り部2は、栽培槽1に取り付けられ、塊状栄養蓄積部20aから伸びる茎20bの先端が通過する位置に開口部2aを有し、植物20の地下部21が成長する地下空間11と植物20の地上部22が成長する地上空間12とを仕切る。遮光性の閉塞構造体200は、塊状栄養蓄積部20aから伸びる茎20bの先端が開口部2aを通過した場合に、茎20bと開口部2aとの間の隙間を塞ぐように、仕切り部2の上面上で茎20bを取り囲む。閉塞構造体200は、茎20bの外周面に接触しながら茎20bを取り囲んだ状態で、茎20bの形状に応じて弾性変形する弾性部材200E1,200E2(または200E1,200E2,200E3)を含んでいることが好ましい。この構成によれば、地上部22が形成される前の地下部21のみが存在する段階から植物20を水耕栽培装置10内で栽培することができ、かつ、地上部22が形成された後の必要な時期に地下部21への光の照射を防止することができる。その結果、光が地下部21に照射されてしまうことに起因して植物20の成長に悪影響が与えられることを抑制することができる。さらに、弾性部材200E1,200E2(または200E1,200E2,200E3)が茎20bに接触するのであれば、茎20bを損傷させるおそれを低減することができる。
(12) 閉塞構造体200は、弾性部材200E1,200E2(または弾性部材200E1,200E2,200E3)を取り囲む筒状部材200A(または200A1,200A2)を含んでいることが好ましい。これによれば、弾性部材200E1,200E2(または弾性部材200E1,200E2,200E3)同士の間に隙間が形成され難くなる。
(13) 茎20bが弾性部材200E1,200E2(または200E1,200E2,200E3または200E)の対向面同士の間を貫通することによって、茎20bの外周面に接触しながら茎20bを取り囲んだ状態が形成されてもよい。
(14) 閉塞構造体200は、平面視において茎20bを挟む複数の閉塞部品200L,200Rにより構成されていてもよい。これによれば、閉塞構造体200に茎20bの外周面に接触しながら茎20bを取り囲んだ状態を容易に形成させることができる。
(15) 水耕栽培装置10は、閉塞構造体200を移動させる移動機構30と、移動機構30を駆動する駆動部3と、駆動部3を制御する制御部4と、をさらに備えていることが好ましい。この場合、制御部4は、塊状栄養蓄積部20aから伸びる茎20bの先端が開口部2aを通過した場合に、駆動部3を制御することによって、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。
(16) 水耕栽培装置10は、地上空間12に設けられ、茎20bの先端が開口部2aを通過したことを検出するセンサ5をさらに備えていてもよい。この場合、制御部4は、茎20bの先端が開口部2aを通過したことをセンサ5が検出した場合に、駆動部3を制御することにより、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。この構成によれば、茎20bの先端が開口部2aを通過した場合に、閉塞構造体200に仕切り部2上で茎20bの外周面に接触しながら茎20bを自動的に取り囲ませることができる。
(17) 水耕栽培装置10は、地上空間12に設けられ、開口部2aを貫通した茎20bの先端の画像データを取得することができるように配置された撮像部15をさらに備えていてもよい。この場合、制御部4は、撮像部15によって取得された画像データに基づいて茎20bの先端が開口部2aを貫通したか否かを判定する判定部4aを含んでいる。制御部4は、茎20bの先端が開口部2aを貫通したと判定部4aが判定した場合に、駆動部3を制御することにより、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。この構成によっても、茎20bの先端が開口部2aを通過した場合に、閉塞構造体200に仕切り部2上で茎20bの外周面に接触しながら茎20bを自動的に取り囲ませることができる。
(18) 制御部4は、時間を計時するタイマ4bを含んでいてもよい。この場合、制御部4は、タイマ4bが所定の時間を計時したことに基づいて、茎20bの先端が開口部2aを貫通したとみなす。それにより、制御部4は、駆動部3を制御することにより、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。この構成によれば、センサ5および撮像部15等の構成を設けることなく、閉塞構造体200に仕切り部2上で茎20bの外周面に接触しながら茎20bを自動的に取り囲ませることができる。
(19) 水耕栽培装置10は、栽培者が操作する操作部8をさらに備えていてもよい。この場合、制御部4は、操作部8に対して所定の操作がなされたことに基づいて、茎20bの先端が開口部2aを貫通したとみなす。それにより、制御部4は、駆動部3を制御することにより、閉塞構造体200が茎20bを取り囲むように閉塞構造体200を移動機構30に移動させる。この構成によれば、植物20の栽培者は閉塞構造体200に茎20bの外周面を取り囲ませるタイミングを決定することができる。
(20) 水耕栽培装置10は、地上空間12において点灯することにより、地上部22に光を照射する照明部7をさらに備えていてもよい。この場合、制御部4は、閉塞構造体200が茎20bの周囲を取り囲むように閉塞構造体200を移動させる前の状態において、照明部7を点灯させる。茎20bは、一般に、光の方向へ向かって伸びる性質を有している。そのため、上記の構成によれば、開口部2aから地下空間11へ光が漏れることにより、茎20bを開口部2aまで誘導することができる。
1 栽培槽
2 仕切り部
2a 開口部
3 駆動部
4 制御部
4b タイマ
5 センサ
7 照明部
8 操作部
10 水耕栽培装置
11 地下空間
12 地上空間
20 植物
20a 塊状栄養蓄積部
20b 茎
21 地下部
22 地上部
30 移動機構
102 絞り機構
102a,102b,102c,102d,102e,102f,102g,102h シャッタ
103a,103b,103c,103d,103e,103f,103g,103h 柔軟性部材
104 検出部
105 圧力測定部
200 閉塞構造体
200A 筒状部材
2 仕切り部
2a 開口部
3 駆動部
4 制御部
4b タイマ
5 センサ
7 照明部
8 操作部
10 水耕栽培装置
11 地下空間
12 地上空間
20 植物
20a 塊状栄養蓄積部
20b 茎
21 地下部
22 地上部
30 移動機構
102 絞り機構
102a,102b,102c,102d,102e,102f,102g,102h シャッタ
103a,103b,103c,103d,103e,103f,103g,103h 柔軟性部材
104 検出部
105 圧力測定部
200 閉塞構造体
200A 筒状部材
Claims (20)
- 植物の塊状栄養蓄積部を収容するように構成された遮光性の栽培槽と、
前記栽培槽に取り付けられ、前記塊状栄養蓄積部から伸びる茎の先端が通過する位置に開口部を有し、前記植物の地下部が成長する地下空間と前記植物の地上部が成長する地上空間とを仕切る遮光性の仕切り部と、
前記仕切り部の一部を構成し、前記開口部の内周面と前記茎との間に隙間が存在する状態から前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ変化し得る遮光性の絞り機構と、
前記絞り機構の状態を変化させるように前記絞り機構を駆動する駆動部と、
前記塊状栄養蓄積部から伸びる茎の先端が前記開口部を通過した場合に、前記駆動部を制御することによって、前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ前記絞り機構を変化させる制御部と、を備えた、水耕栽培装置。 - 前記絞り機構は、3以上の平板状のシャッタを有し、
前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態で、前記3以上の平板状のシャッタのうちの隣接するシャッタの一部同士が平面視において互いに重なるように配置されている、請求項1に記載の水耕栽培装置。 - 前記絞り機構は、前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態で、前記茎の形状に応じて弾性変形する柔軟性部材を含む、請求項1または2に記載の水耕栽培装置。
- 前記茎に接触したことを検出する検出部をさらに備え、
前記制御部は、前記開口部の内周面と前記茎の外周面とが接触したことを前記検出部が検出した場合に、前記絞り機構の動作を停止させる、請求項1〜3のいずれかに記載の水耕栽培装置。 - 前記開口部の内周面と前記茎の外周面とが接触しているときの接触圧を検出する圧力測定部をさらに備え、
前記制御部は、前記圧力測定部によって検出された前記接触圧が所定値以下になるように前記絞り機構を制御する、請求項1〜3のいずれかに記載の水耕栽培装置。 - 前記地上空間に設けられ、前記茎の先端が前記開口部を通過したことを検出するセンサをさらに備え、
前記制御部は、前記茎の先端が前記開口部を通過したことを前記センサが検出した場合に、前記駆動部を制御することにより、前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ前記絞り機構を変化させる、請求項1〜5のいずれかに記載の水耕栽培装置。 - 前記地上空間に設けられ、前記開口部を貫通した前記茎の先端の画像データを取得する撮像部をさらに備え、
前記制御部は、
前記撮像部によって取得された画像データに基づいて前記茎の先端が前記開口部を貫通したか否かを判定する判定部を含み、
前記茎の先端が前記開口部を貫通したと前記判定部が判定した場合に、前記駆動部を制御することにより、前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ前記絞り機構を変化させる、請求項1〜5のいずれかに記載の水耕栽培装置。 - 前記制御部は、時間を計時するタイマを含み、前記タイマが所定の時間を計時したことに基づいて、前記茎の先端が前記開口部を貫通したとみなし、前記駆動部を制御することにより、前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ前記絞り機構を変化させる、請求項1〜5のいずれかに記載の水耕栽培装置。
- 栽培者が操作する操作部をさらに備え、
前記制御部は、前記操作部に対して所定の操作がなされたことに基づいて、前記茎の先端が前記開口部を貫通したとみなし、前記駆動部を制御することにより、前記開口部の内周面が前記茎の外周面に接触しながら前記茎を取り囲む状態へ前記絞り機構を変化させる、請求項1〜5のいずれかに記載の水耕栽培装置。 - 前記地上空間において点灯することにより、前記地上部に光を照射する照明部をさらに備え、
前記制御部は、前記開口部の内周面と前記茎の外周面との間に隙間が存在する状態において、前記照明部を点灯させる、請求項1〜9のいずれかに記載の水耕栽培装置。 - 植物の塊状栄養蓄積部を収容するように構成された遮光性の栽培槽と、
前記栽培槽に取り付けられ、前記塊状栄養蓄積部から伸びる茎の先端が通過する位置に開口部を有し、前記植物の地下部が成長する地下空間と前記植物の地上部が成長する地上空間とを仕切る遮光性の仕切り部と、
前記塊状栄養蓄積部から伸びる茎の先端が前記開口部を通過した場合に、前記茎と前記開口部との間の隙間を塞ぐように、前記仕切り部の上面上で前記茎を取り囲む遮光性の閉塞構造体と、を備え、
前記閉塞構造体は、前記茎の外周面に接触しながら前記茎を取り囲んだ状態で、前記茎の形状に応じて弾性変形する弾性部材を含む、水耕栽培装置。 - 前記閉塞構造体は、前記弾性部材を取り囲む筒状部材を含む、請求項11に記載の水耕栽培装置。
- 前記茎が前記弾性部材の対向面同士の間を貫通するによって、前記茎の外周面に接触しながら前記茎を取り囲んだ状態が形成された、請求項11または12に記載の水耕栽培装置。
- 前記閉塞構造体は、平面視において前記茎を挟む複数の閉塞部品により構成されている、請求項11〜13のいずれかに記載の水耕栽培装置。
- 前記閉塞構造体を移動させる移動機構と、
前記移動機構を駆動する駆動部と、
前記駆動部を制御する制御部と、をさらに備え、
前記制御部は、前記塊状栄養蓄積部から伸びる茎の先端が前記開口部を通過した場合に、前記駆動部を制御することによって、前記閉塞構造体が前記茎を取り囲むように前記閉塞構造体を前記移動機構に移動させる、請求項11〜14のいずれかに記載の水耕栽培装置。 - 前記地上空間に設けられ、前記茎の先端が前記開口部を通過したことを検出するセンサをさらに備え、
前記制御部は、前記茎の先端が前記開口部を通過したことを前記センサが検出した場合に、前記駆動部を制御することにより、前記閉塞構造体が前記茎を取り囲むように前記閉塞構造体を前記移動機構に移動させる、請求項15に記載の水耕栽培装置。 - 前記地上空間に設けられ、前記開口部を貫通した前記茎の先端の画像データを取得することができるように配置された撮像部をさらに備え、
前記制御部は、
前記撮像部によって取得された画像データに基づいて前記茎の先端が前記開口部を貫通したか否かを判定する判定部を含み、
前記茎の先端が前記開口部を貫通したと前記判定部が判定した場合に、前記駆動部を制御することにより、前記閉塞構造体が前記茎を取り囲むように前記閉塞構造体を前記移動機構に移動させる、請求項15に記載の水耕栽培装置。 - 前記制御部は、
時間を計時するタイマを含み、
前記タイマが所定の時間を計時したことに基づいて、前記茎の先端が前記開口部を貫通したとみなし、前記駆動部を制御することにより、前記閉塞構造体が前記茎を取り囲むように前記閉塞構造体を前記移動機構に移動させる、請求項15に記載の水耕栽培装置。 - 栽培者が操作する操作部をさらに備え、
前記制御部は、前記操作部に対して所定の操作がなされたことに基づいて、前記茎の先端が前記開口部を貫通したとみなし、前記駆動部を制御することにより、前記閉塞構造体が前記茎を取り囲むように前記閉塞構造体を前記移動機構に移動させる、請求項15に記載の水耕栽培装置。 - 前記地上空間において点灯することにより、前記地上部に光を照射する照明部をさらに備え、
前記制御部は、前記閉塞構造体が前記茎の周囲を取り囲むように前記閉塞構造体を移動させる前の状態において、前記照明部を点灯させる、請求項15〜19のいずれかに記載の水耕栽培装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015135933A JP2017018004A (ja) | 2015-07-07 | 2015-07-07 | 水耕栽培装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015135933A JP2017018004A (ja) | 2015-07-07 | 2015-07-07 | 水耕栽培装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017018004A true JP2017018004A (ja) | 2017-01-26 |
Family
ID=57886992
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015135933A Pending JP2017018004A (ja) | 2015-07-07 | 2015-07-07 | 水耕栽培装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017018004A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7514580B1 (ja) * | 2023-04-28 | 2024-07-11 | 株式会社Gcj | 植物総体の栽培装置および栽培方法 |
| WO2024224663A1 (ja) * | 2023-04-28 | 2024-10-31 | 株式会社Gcj | 植物総体の栽培装置および栽培方法 |
-
2015
- 2015-07-07 JP JP2015135933A patent/JP2017018004A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7514580B1 (ja) * | 2023-04-28 | 2024-07-11 | 株式会社Gcj | 植物総体の栽培装置および栽培方法 |
| WO2024224663A1 (ja) * | 2023-04-28 | 2024-10-31 | 株式会社Gcj | 植物総体の栽培装置および栽培方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017018004A (ja) | 水耕栽培装置 | |
| CN106163264B (zh) | 水耕栽培装置及水耕栽培方法 | |
| JP6276100B2 (ja) | 農作物の成長観察システム | |
| CA2944667A1 (en) | Plant growing apparatus | |
| Rico | Automated pH monitoring and controlling system for hydroponics under greenhouse condition | |
| WO2017165935A8 (pt) | Vaso eletroeletrônico modular com sistema automatizado de controles e monitoramento digital, utilizado para o aero cultivo de plantas em ambientes internos e externos | |
| KR20170096327A (ko) | 식물 생장 관리시스템 | |
| KR20170077947A (ko) | 비닐하우스 환경 조절시스템 | |
| WO2016103613A1 (ja) | 水耕栽培装置 | |
| TWM491329U (zh) | 立體層架式自動化生物培養進料與收穫作業系統 | |
| JP6886656B2 (ja) | 植物育成システム、植物育成方法および植物育成システム用プログラム | |
| KR20210067782A (ko) | 고정형 식물 영상 획득장치 | |
| CN203884257U (zh) | 马铃薯免耕栽培装置 | |
| JP2017012130A (ja) | 植物育成装置 | |
| KR102400240B1 (ko) | 시설채소 나방류 유인 포획용 다파장 해충 트랩 | |
| JP2016032441A (ja) | 水耕栽培装置 | |
| KR20220065498A (ko) | 식물 뿌리 모니터링 장치 | |
| KR101767588B1 (ko) | 식재 로봇용 토양경도 감지장치 | |
| JP2016149948A (ja) | 水耕栽培装置 | |
| JPWO2017002321A1 (ja) | 植物育成装置 | |
| KR101804056B1 (ko) | 콩나물 재배기 | |
| US20230003856A1 (en) | Time-of-flight sensing for horticulture | |
| KR101191100B1 (ko) | 참외 수확용 엔드 이펙터 | |
| CN106171661B (zh) | 智能小花园种植装置及种植方法 | |
| KR102308389B1 (ko) | 반려식물 재배장치 |