JP2017202550A - ロボット教示装置 - Google Patents
ロボット教示装置 Download PDFInfo
- Publication number
- JP2017202550A JP2017202550A JP2016095663A JP2016095663A JP2017202550A JP 2017202550 A JP2017202550 A JP 2017202550A JP 2016095663 A JP2016095663 A JP 2016095663A JP 2016095663 A JP2016095663 A JP 2016095663A JP 2017202550 A JP2017202550 A JP 2017202550A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- teaching
- operation unit
- unit
- terminal device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/42—Recording and playback systems, i.e. in which the program is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/163—Program controls characterised by the control loop learning, adaptive, model based, rule based expert control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/006—Controls for manipulators by means of a wireless system for controlling one or several manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/06—Control stands, e.g. consoles, switchboards
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/42—Recording and playback systems, i.e. in which the program is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine
- G05B19/425—Teaching successive positions by numerical control, i.e. commands being entered to control the positioning servo of the tool head or end effector
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/222—Remote-control arrangements operated by humans
- G05D1/223—Command input arrangements on the remote controller, e.g. joysticks or touch screens
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/222—Remote-control arrangements operated by humans
- G05D1/224—Output arrangements on the remote controller, e.g. displays, haptics or speakers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39439—Joystick, handle, lever controls manipulator directly, manually by operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40195—Tele-operation, computer assisted manual operation
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Telephone Set Structure (AREA)
Abstract
Description
本発明に係るロボットの教示装置の第一の実施形態について、以下、図面を参照しつつ説明する。
本発明に係るロボットの教示装置の第二の実施形態について、以下、図面を参照しつつ説明する。なお、以下においては、第一の実施形態と相違する事項を中心に説明を行うものとし、特に説明しない事項については、矛盾等がない限り、第一の実施形態と同様である。
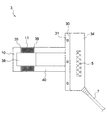
2 タブレット端末
3 ロボット操作ユニット
4 非常停止ボタン(安全確保手段)
5 トリガスイッチ(安全確保手段)
6 タブレット端末用ケーブル
7 操作ユニット用ケーブル
8 操作ボタン
9 タッチパネル
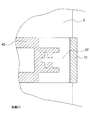
10 押え具
11 バネ
12 USBコネクタ
13 タブレット用コネクタ
18 CPU回路
19 通信回路
20 非常停止スイッチ
21 操作スイッチ
22 無線通信I/F回路
23 有線通信I/F回路
24 電源回路
25 安全回路
26 CPUボード
27 制御装置電源回路
28 ロボット制御装置
30 アタッチメント(連結部)
31 ボルト
33 ボルト通し孔
34 操作ユニット本体
35 押え具側固定部
36 本体側固定部
37 前面ガイドプレート
38 後面ガイドプレート
39 フランジ
40 アタッチメント本体
51 枠部
52 固定部
53 固定帯
54 面ファスナー部
55 フック部
56 ロック機構
57 ロック解除ピン
58 固定部材
59 スライド溝
60 バネ
61 張り出しプレート
62 上部ガイド部
63 下部ガイド部
64 案内孔
65 ロック溝
Claims (7)
- ロボットを制御するためのロボット制御装置との間で通信可能に接続され、前記ロボットに動作を教示するための教示装置であって、
前記ロボットの制御内容を表示するための表示手段と、前記ロボットの制御内容を入力するための入力手段と、外部と通信するための通信手段と、を有する携帯端末機器と、
前記ロボットを操作するための操作手段と、前記ロボットの安全動作を確保するための安全確保手段と、前記携帯端末機器と通信するための通信手段と、を有するロボット操作部と、を備え、
前記携帯端末機器が、前記ロボット操作部に着脱自在に連結されている、教示装置。 - 前記安全確保手段が、前記ロボットの動作を非常停止する非常停止手段を備えている、請求項1に記載の教示装置。
- 前記安全確保手段が、前記ロボットの起動を許可する起動許可手段を備えている、請求項1または2に記載の教示装置。
- 前記起動許可手段が、押しボタン式スイッチであり、押しボタンを押している間のみ、前記ロボットの教示操作が可能となるように構成されている、請求項3に記載の教示装置。
- 前記ロボット操作部が、前記操作手段を有する操作部本体と、前記携帯端末機器に応じて構成され、前記携帯端末機器に着脱自在に連結される連結部と、を備え、
前記連結部が、前記操作部本体に着脱可能に連結されている、請求項1ないし4のいずれか一項に記載の教示装置。 - 前記携帯端末機器の前記通信手段と前記ロボット操作部の前記通信手段との間の通信が無線により行われるように構成されている、請求項1ないし5のいずれか一項に記載の教示装置。
- 前記携帯端末機器における前記表示手段および前記入力手段がタッチパネルを含む、請求項1ないし6のいずれか一項に記載の教示装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095663A JP6511011B2 (ja) | 2016-05-11 | 2016-05-11 | ロボット教示装置 |
| US16/301,378 US20190299404A1 (en) | 2016-05-11 | 2017-05-09 | Robot teaching apparatus |
| PCT/JP2017/017579 WO2017195788A1 (ja) | 2016-05-11 | 2017-05-09 | ロボット教示装置 |
| KR1020187035786A KR20190058385A (ko) | 2016-05-11 | 2017-05-09 | 로봇 교시 장치 |
| CN201780028878.8A CN109153126A (zh) | 2016-05-11 | 2017-05-09 | 机器人教导装置 |
| EP17796149.7A EP3456489A4 (en) | 2016-05-11 | 2017-05-09 | DEVICE FOR ROBOT INSTRUCTION |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016095663A JP6511011B2 (ja) | 2016-05-11 | 2016-05-11 | ロボット教示装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017202550A true JP2017202550A (ja) | 2017-11-16 |
| JP6511011B2 JP6511011B2 (ja) | 2019-05-08 |
Family
ID=60267274
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016095663A Active JP6511011B2 (ja) | 2016-05-11 | 2016-05-11 | ロボット教示装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20190299404A1 (ja) |
| EP (1) | EP3456489A4 (ja) |
| JP (1) | JP6511011B2 (ja) |
| KR (1) | KR20190058385A (ja) |
| CN (1) | CN109153126A (ja) |
| WO (1) | WO2017195788A1 (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020019103A (ja) * | 2018-08-01 | 2020-02-06 | ファナック株式会社 | 携帯端末を用いたロボット教示装置 |
| JP2020044625A (ja) * | 2018-09-20 | 2020-03-26 | 株式会社デンソーウェーブ | 非常停止スイッチ、及びロボットシステム |
| JP2020044636A (ja) * | 2018-09-21 | 2020-03-26 | 株式会社デンソーウェーブ | 非常停止スイッチ、及びロボットシステム |
| JP2020049643A (ja) * | 2018-09-28 | 2020-04-02 | ファナック株式会社 | 携帯端末に取付ける安全スイッチユニット |
| KR20200098955A (ko) * | 2019-02-13 | 2020-08-21 | 한국로봇융합연구원 | 모듈 분리형 로봇 티칭 펜던트 및 그 제어방법 |
| JP2020160893A (ja) * | 2019-03-27 | 2020-10-01 | Idec株式会社 | 機械操作用ユニット及び機械操作用システム |
| JP2020179452A (ja) * | 2019-04-25 | 2020-11-05 | セイコーエプソン株式会社 | 教示装置およびロボットシステム |
| WO2021220945A1 (ja) * | 2020-04-28 | 2021-11-04 | ファナック株式会社 | 安全スイッチ装置 |
| WO2021220386A1 (ja) * | 2020-04-28 | 2021-11-04 | ファナック株式会社 | 安全スイッチ装置 |
| JP2023506050A (ja) * | 2019-12-17 | 2023-02-14 | ワンデルボッツ ゲーエムベーハー | 機械の少なくとも1つの動き及び少なくとも1つの活動をトレーニングするための手持ち式装置、システム、及び方法 |
| US11667038B2 (en) | 2019-07-09 | 2023-06-06 | Fanuc Corporation | Safety switch device attached to mobile terminal for operating machine and machine operation device including safety switch device |
| US11691288B2 (en) | 2019-03-25 | 2023-07-04 | Fanuc Corporation | Robot control system |
| JP7359992B1 (ja) * | 2022-06-30 | 2023-10-11 | ファナック株式会社 | 認証処理を実行する機械操作システム、制御装置及びコンピュータプログラム |
| WO2024057545A1 (ja) * | 2022-09-16 | 2024-03-21 | ファナック株式会社 | 端末支持装置、教示操作装置、及びロボット制御システム |
| US12220807B2 (en) | 2019-11-19 | 2025-02-11 | Idec Corporation | Handheld device and holder |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112296986B (zh) * | 2020-09-14 | 2022-04-22 | 珠海格力电器股份有限公司 | 一种组合式的机器人示教器及机器人 |
| KR102376645B1 (ko) * | 2021-11-03 | 2022-03-21 | 주식회사 나우로보틱스 | 로봇용 교시 조작기 |
| CN116494220A (zh) * | 2022-01-18 | 2023-07-28 | 广东美的电气有限公司 | 机器人控制装置、机器人系统和机器人组件 |
| JP7227434B1 (ja) | 2022-05-31 | 2023-02-21 | ファナック株式会社 | 有線通信及び無線通信を用いた機械操作システム、その方法、制御装置、及びコンピュータプログラム |
| CN116673934A (zh) * | 2023-06-29 | 2023-09-01 | 节卡机器人股份有限公司 | 示教装置及机器人 |
| WO2026055853A1 (en) * | 2024-09-11 | 2026-03-19 | Abb Schweiz Ag | Teach pendant unit, teaching assembly, robotic system and method of teaching robot |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5903645A (en) * | 1996-10-23 | 1999-05-11 | Tsay; Wen-Feng | Clamping device for mobile phones |
| JP2004355195A (ja) * | 2003-05-28 | 2004-12-16 | Yaskawa Electric Corp | ロボット用教示操作装置 |
| US20050141681A1 (en) * | 2002-04-12 | 2005-06-30 | Dieter Graiger | Mobile arithmetic unit and extension device for industrial machine control |
| US20140042285A1 (en) * | 2012-08-13 | 2014-02-13 | Jeffrey D. Carnevali | Modular electronics platform |
| JP2014220474A (ja) * | 2013-05-10 | 2014-11-20 | パイオニア株式会社 | 携帯端末装着装置 |
| US20150051736A1 (en) * | 2013-08-13 | 2015-02-19 | Hong Fu Jin Precision Industry (Shenzhen) Co., Ltd. | Bracket and robot demonstrator using the same |
| WO2015137135A1 (ja) * | 2014-03-14 | 2015-09-17 | オムロン株式会社 | 無線制御端末、制御対象物の無線制御装置、非常停止制御プログラム |
| JP2015232804A (ja) * | 2014-06-10 | 2015-12-24 | 村田機械株式会社 | 操作部材及び産業機械システム |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4716268B2 (ja) * | 2005-01-26 | 2011-07-06 | 株式会社安川電機 | ロボットシステム |
| EP1716982B1 (en) * | 2005-04-19 | 2008-05-07 | COMAU S.p.A. | Process for controlling industrial robots, and related robots, robot systems and computer programs |
| DE102010025781B4 (de) * | 2010-07-01 | 2022-09-22 | Kuka Roboter Gmbh | Tragbare Sicherheitseingabeeinrichtung für eine Robotersteuerung |
| JP5459255B2 (ja) | 2011-04-08 | 2014-04-02 | 株式会社安川電機 | ロボットシステム |
| JP2016013590A (ja) | 2014-07-01 | 2016-01-28 | セイコーエプソン株式会社 | 教示装置、及びロボットシステム |
| CN105373119B (zh) * | 2014-09-01 | 2018-10-12 | 上银科技股份有限公司 | 机器人的教导装置 |
| JP6565151B2 (ja) * | 2014-09-19 | 2019-08-28 | 株式会社デンソーウェーブ | 産業用ロボット操作装置 |
| JP6497021B2 (ja) * | 2014-10-01 | 2019-04-10 | 株式会社デンソーウェーブ | ロボット操作装置、ロボットシステム、及びロボット操作プログラム |
| US9597807B2 (en) * | 2014-10-24 | 2017-03-21 | Hiwin Technologies Corp. | Robot teaching device |
-
2016
- 2016-05-11 JP JP2016095663A patent/JP6511011B2/ja active Active
-
2017
- 2017-05-09 US US16/301,378 patent/US20190299404A1/en not_active Abandoned
- 2017-05-09 CN CN201780028878.8A patent/CN109153126A/zh active Pending
- 2017-05-09 KR KR1020187035786A patent/KR20190058385A/ko not_active Ceased
- 2017-05-09 WO PCT/JP2017/017579 patent/WO2017195788A1/ja not_active Ceased
- 2017-05-09 EP EP17796149.7A patent/EP3456489A4/en not_active Withdrawn
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5903645A (en) * | 1996-10-23 | 1999-05-11 | Tsay; Wen-Feng | Clamping device for mobile phones |
| US20050141681A1 (en) * | 2002-04-12 | 2005-06-30 | Dieter Graiger | Mobile arithmetic unit and extension device for industrial machine control |
| JP2004355195A (ja) * | 2003-05-28 | 2004-12-16 | Yaskawa Electric Corp | ロボット用教示操作装置 |
| US20140042285A1 (en) * | 2012-08-13 | 2014-02-13 | Jeffrey D. Carnevali | Modular electronics platform |
| JP2014220474A (ja) * | 2013-05-10 | 2014-11-20 | パイオニア株式会社 | 携帯端末装着装置 |
| US20150051736A1 (en) * | 2013-08-13 | 2015-02-19 | Hong Fu Jin Precision Industry (Shenzhen) Co., Ltd. | Bracket and robot demonstrator using the same |
| WO2015137135A1 (ja) * | 2014-03-14 | 2015-09-17 | オムロン株式会社 | 無線制御端末、制御対象物の無線制御装置、非常停止制御プログラム |
| JP2015232804A (ja) * | 2014-06-10 | 2015-12-24 | 村田機械株式会社 | 操作部材及び産業機械システム |
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11105463B2 (en) | 2018-08-01 | 2021-08-31 | Fanuc Corporation | Robot teaching apparatus using mobile terminal |
| CN110788837A (zh) * | 2018-08-01 | 2020-02-14 | 发那科株式会社 | 机器人示教装置 |
| DE102019005179B4 (de) | 2018-08-01 | 2022-11-03 | Fanuc Corporation | Roboterprogrammiervorrichtung, die ein mobiles Endgerät verwendet |
| JP2020019103A (ja) * | 2018-08-01 | 2020-02-06 | ファナック株式会社 | 携帯端末を用いたロボット教示装置 |
| JP2020044625A (ja) * | 2018-09-20 | 2020-03-26 | 株式会社デンソーウェーブ | 非常停止スイッチ、及びロボットシステム |
| JP7006550B2 (ja) | 2018-09-20 | 2022-01-24 | 株式会社デンソーウェーブ | 非常停止スイッチ、及びロボットシステム |
| JP2020044636A (ja) * | 2018-09-21 | 2020-03-26 | 株式会社デンソーウェーブ | 非常停止スイッチ、及びロボットシステム |
| JP2020049643A (ja) * | 2018-09-28 | 2020-04-02 | ファナック株式会社 | 携帯端末に取付ける安全スイッチユニット |
| KR102212478B1 (ko) * | 2019-02-13 | 2021-02-05 | 한국로봇융합연구원 | 모듈 분리형 로봇 티칭 펜던트 및 그 제어방법 |
| KR20200098955A (ko) * | 2019-02-13 | 2020-08-21 | 한국로봇융합연구원 | 모듈 분리형 로봇 티칭 펜던트 및 그 제어방법 |
| US11691288B2 (en) | 2019-03-25 | 2023-07-04 | Fanuc Corporation | Robot control system |
| JP2020160893A (ja) * | 2019-03-27 | 2020-10-01 | Idec株式会社 | 機械操作用ユニット及び機械操作用システム |
| JP2020179452A (ja) * | 2019-04-25 | 2020-11-05 | セイコーエプソン株式会社 | 教示装置およびロボットシステム |
| JP7379860B2 (ja) | 2019-04-25 | 2023-11-15 | セイコーエプソン株式会社 | 教示装置およびロボットシステム |
| US11639003B2 (en) | 2019-04-25 | 2023-05-02 | Seiko Epson Corporation | Teaching device and robot system |
| US11999050B2 (en) | 2019-07-09 | 2024-06-04 | Fanuc Corporation | Safety switch device attached to mobile terminal for operating machine and machine operation device including safety switch device |
| JP2023099576A (ja) * | 2019-07-09 | 2023-07-13 | ファナック株式会社 | 機械を操作する携帯端末に取り付けられる安全スイッチ装置および安全スイッチ装置を備える機械の操作装置 |
| DE102020117469B4 (de) | 2019-07-09 | 2025-02-06 | Fanuc Corporation | Sicherheitsschaltervorrichtung, die an einem tragbaren endgerät zum bedienen einer maschine angebracht wird, und bedienvorrichtung einer maschine, die mit einer sicherheitsschaltervorrichtung versehen ist |
| US11667038B2 (en) | 2019-07-09 | 2023-06-06 | Fanuc Corporation | Safety switch device attached to mobile terminal for operating machine and machine operation device including safety switch device |
| JP7583102B2 (ja) | 2019-07-09 | 2024-11-13 | ファナック株式会社 | 機械を操作する携帯端末に取り付けられる安全スイッチ装置および安全スイッチ装置を備える機械の操作装置 |
| US12220807B2 (en) | 2019-11-19 | 2025-02-11 | Idec Corporation | Handheld device and holder |
| JP2023506050A (ja) * | 2019-12-17 | 2023-02-14 | ワンデルボッツ ゲーエムベーハー | 機械の少なくとも1つの動き及び少なくとも1つの活動をトレーニングするための手持ち式装置、システム、及び方法 |
| JPWO2021220945A1 (ja) * | 2020-04-28 | 2021-11-04 | ||
| DE112021001056T5 (de) | 2020-04-28 | 2023-02-02 | Fanuc Corporation | Sicherheitsschaltvorrichtung |
| WO2021220386A1 (ja) * | 2020-04-28 | 2021-11-04 | ファナック株式会社 | 安全スイッチ装置 |
| JP7453358B2 (ja) | 2020-04-28 | 2024-03-19 | ファナック株式会社 | 安全スイッチ装置 |
| DE112021001056B4 (de) | 2020-04-28 | 2026-04-30 | Fanuc Corporation | Sicherheitsschaltvorrichtung |
| WO2021220945A1 (ja) * | 2020-04-28 | 2021-11-04 | ファナック株式会社 | 安全スイッチ装置 |
| JP7538219B2 (ja) | 2020-04-28 | 2024-08-21 | ファナック株式会社 | 安全スイッチ装置 |
| CN115516394A (zh) * | 2020-04-28 | 2022-12-23 | 发那科株式会社 | 安全开关装置 |
| US12186889B2 (en) | 2020-04-28 | 2025-01-07 | Fanuc Corporation | Safety switch device |
| JPWO2021220386A1 (ja) * | 2020-04-28 | 2021-11-04 | ||
| CN115516394B (zh) * | 2020-04-28 | 2025-08-22 | 发那科株式会社 | 安全开关装置 |
| US12311559B2 (en) | 2020-04-28 | 2025-05-27 | Fanuc Corporation | Safety switch device |
| JP7359992B1 (ja) * | 2022-06-30 | 2023-10-11 | ファナック株式会社 | 認証処理を実行する機械操作システム、制御装置及びコンピュータプログラム |
| WO2024057545A1 (ja) * | 2022-09-16 | 2024-03-21 | ファナック株式会社 | 端末支持装置、教示操作装置、及びロボット制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3456489A1 (en) | 2019-03-20 |
| WO2017195788A1 (ja) | 2017-11-16 |
| KR20190058385A (ko) | 2019-05-29 |
| JP6511011B2 (ja) | 2019-05-08 |
| EP3456489A4 (en) | 2020-01-08 |
| US20190299404A1 (en) | 2019-10-03 |
| CN109153126A (zh) | 2019-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6511011B2 (ja) | ロボット教示装置 | |
| JP2016060018A (ja) | ロボット操作装置 | |
| US9823702B2 (en) | Electronic device having a detachable tablet | |
| KR101850191B1 (ko) | 산업용 로봇의 조작에 이용되는 교시 장치 | |
| JP5143276B1 (ja) | 携帯情報端末機保持具及び携帯情報端末機用コントローラ | |
| CN107580690B (zh) | 用于特别是机器人的工业机器的便携式安全控制装置 | |
| US8625263B2 (en) | Portable computer having detachable wireless keyboard | |
| JP7277294B2 (ja) | 機械を操作する携帯端末に取り付けられる安全スイッチ装置および安全スイッチ装置を備える機械の操作装置 | |
| JP2021164993A (ja) | 産業用ロボット操作装置 | |
| JP6773087B2 (ja) | ロボット操作装置 | |
| KR101861530B1 (ko) | 패치형 컨트롤러 | |
| JP6127240B1 (ja) | 充電端子保護ホルダー | |
| EP4448233B1 (de) | Modulares roboterbedienhandgerät | |
| JP5168331B2 (ja) | 携帯用電子機器 | |
| CN109935070B (zh) | 一种无人机遥控基站 | |
| JPWO2024057545A5 (ja) | ||
| JP2020160893A (ja) | 機械操作用ユニット及び機械操作用システム | |
| WO2021220386A1 (ja) | 安全スイッチ装置 | |
| CN115461200A (zh) | 安全开关装置 | |
| JP2017116989A (ja) | 電子機器及び電子機器のカバー部材 | |
| JPH04354424A (ja) | 無線装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180525 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180724 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190306 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190405 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6511011 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |