JP2017227231A - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- JP2017227231A JP2017227231A JP2016122112A JP2016122112A JP2017227231A JP 2017227231 A JP2017227231 A JP 2017227231A JP 2016122112 A JP2016122112 A JP 2016122112A JP 2016122112 A JP2016122112 A JP 2016122112A JP 2017227231 A JP2017227231 A JP 2017227231A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- capacity
- traveling
- motor capacity
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/4192—Detecting malfunction or potential malfunction, e.g. fail safe
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/42—Control of exclusively fluid gearing hydrostatic involving adjustment of a pump or motor with adjustable output or capacity
- F16H61/423—Motor capacity control by fluid pressure control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/4069—Valves related to the control of neutral, e.g. shut off valves
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Control Of Fluid Gearings (AREA)
- Operation Control Of Excavators (AREA)
- Fluid-Pressure Circuits (AREA)
Abstract
【課題】走行操作具が操作されない場合には、つまり、走行操作具が中立位置にあって機体が走行停止状態の場合には、油圧の洩れにより機体が傾斜地に沿って下降したとしても、下降量を抑制することができる建設機械を提供する。【解決手段】走行操作具の操作に応じ吐出容量が変更される可変容量型の走行用油圧ポンプPL,PRと、走行用油圧ポンプに流体接続され、複数段のモータ容量に切換可能な可変容量型の走行用油圧モータML,MRと、走行用油圧モータの複数段のモータ容量を選択するモータ容量選択部66と、モータ容量選択部を操作するモータ容量選択操作部と、走行操作具の操作を検出する操作検出部と、操作検出部及びモータ容量選択操作部を入力側に接続し、出力側にモータ容量選択部を接続した制御部と、を具備し、操作検出部が走行操作具の操作を検出しない場合、モータ容量選択部の選択結果に優先し走行用油圧モータを大容量の段に設定される。【選択図】図6
Description
本発明は、建設機械、詳しくは、走行停止状態では、強制的に走行用油圧モータのモータ容量が大容量の段(低速段)に設定されるようにした建設機械に関する。
従来、建設機械の一形態として、走行操作具の操作に対応して吐出容量が変更される可変容量型の走行用油圧ポンプと、走行用油圧ポンプに流体接続されて、複数段のモータ容量に切換選択可能とした可変容量型の走行用油圧モータと、を装備したものがある。ところが、このような形態の建設機械では、傾斜地(特に、上り坂)で走行停止した際に、走行用油圧ポンプや走行用油圧モータの油圧の洩れにより、機体が傾斜地に沿って下降するという問題がある。この際、走行用油圧モータのモータ容量が小容量の段(高速段)に設定されたまま走行停止すると、その停止時間の間に高速段で下降するため、その分下降量が大きくなって、思いがけない事態となる虞がある。その点、特許文献1には、機体の傾斜量を検知して、傾斜が大きいときに走行用油圧モータを低速段に切り替えることで、発進時における逆走を防止する技術が開示されている。
ところが、特許文献1では、低速段への切り替えを、機体の傾斜量を検知することで判定しているため、機体の傾斜量が頻繁に変化する不整地を走行する場合、オペレータの予期しない変速制御がなされて、オペレータに恐怖感を与える可能性がある。
そこで、本発明は、走行操作具が操作されない場合には、つまり、走行操作具が中立位置にあって機体が走行停止状態の場合には、走行用油圧モータのモータ容量が大容量の段(低速段)に設定されるようにすることで、油圧の洩れにより機体が傾斜地に沿って下降したとしても、下降量を抑制することができる建設機械を提供することを目的とする。
請求項1記載の発明は、
走行操作具の操作に対応して吐出容量が変更される可変容量型の走行用油圧ポンプと、走行用油圧ポンプに流体接続されて、複数段のモータ容量に切換選択可能とした可変容量型の走行用油圧モータと、走行用油圧モータの複数段のモータ容量の内の一つを選択するモータ容量選択部と、前記モータ容量選択部を操作するモータ容量選択操作部と、走行操作具の操作を検出する操作検出部と、前記操作検出部及び前記モータ容量選択操作部を入力側に接続する一方、出力側に前記モータ容量選択部を接続した制御部と、を具備し、
前記操作検出部が走行操作具の操作を検出しない場合には、前記モータ容量選択部の選択結果に優先して走行用油圧モータのモータ容量が大容量の段に設定されることを特徴とする。
走行操作具の操作に対応して吐出容量が変更される可変容量型の走行用油圧ポンプと、走行用油圧ポンプに流体接続されて、複数段のモータ容量に切換選択可能とした可変容量型の走行用油圧モータと、走行用油圧モータの複数段のモータ容量の内の一つを選択するモータ容量選択部と、前記モータ容量選択部を操作するモータ容量選択操作部と、走行操作具の操作を検出する操作検出部と、前記操作検出部及び前記モータ容量選択操作部を入力側に接続する一方、出力側に前記モータ容量選択部を接続した制御部と、を具備し、
前記操作検出部が走行操作具の操作を検出しない場合には、前記モータ容量選択部の選択結果に優先して走行用油圧モータのモータ容量が大容量の段に設定されることを特徴とする。
請求項2記載の発明は、請求項1 記載の発明であって、
前記モータ容量選択操作部を介して前記モータ容量選択部により小容量の段が選択されている際に、前記操作検出部が走行操作具の操作を検出している状態から検出しない状態となった場合には、モータ容量が小容量の段から大容量の段に漸次シフトダウンされながら走行停止されることを特徴とする。
前記モータ容量選択操作部を介して前記モータ容量選択部により小容量の段が選択されている際に、前記操作検出部が走行操作具の操作を検出している状態から検出しない状態となった場合には、モータ容量が小容量の段から大容量の段に漸次シフトダウンされながら走行停止されることを特徴とする。
請求項3記載の発明は、請求項1 記載の発明であって、
前記モータ容量選択操作部を介して前記モータ容量選択部により小容量の段が選択されている際に、操作検出部が走行操作具の操作を検出しない状態から検出している状態となった場合には、モータ容量が大容量の段から小容量の段に漸次シフトアップされながら増速されることを特徴とする。
前記モータ容量選択操作部を介して前記モータ容量選択部により小容量の段が選択されている際に、操作検出部が走行操作具の操作を検出しない状態から検出している状態となった場合には、モータ容量が大容量の段から小容量の段に漸次シフトアップされながら増速されることを特徴とする。
請求項4記載の発明は、請求項1〜3のいずれか1項記載の発明であって、
前記モータ容量選択操作部は、走行操作具に設けて、前記走行操作具を把持した手の指先で選択操作可能としていることを特徴とする。
前記モータ容量選択操作部は、走行操作具に設けて、前記走行操作具を把持した手の指先で選択操作可能としていることを特徴とする。
本発明によれば、走行操作具が操作されない場合には、つまり、走行操作具が中立位置にあって機体が走行停止状態の場合には、走行用油圧モータのモータ容量が大容量の段(低速段)に設定されるようにすることで、油圧の洩れにより機体が傾斜地に沿って下降したとしても、下降量を抑制することができる。したがって、機体が低速段で下降している間に、オペレータが機体の下降を認識して、パーキングブレーキを制動させる操作具を速やかに操作することで、不測の事態が発生するのを回避することができる。
以下に、本発明に係る実施形態について図面を参照しながら説明する。図1〜図3に示すAは、本実施形態に係る油圧駆動式の建設機械である。建設機械Aは、図1〜図3に示すように、左右一対のクローラ式の走行部10,10間に基台11を架設している。基台11の上には、上方が開口された四角形箱型に形成した荷台13を載設するとともに、基台11と荷台13との間にダンプシリンダ14を介設して、ダンプシリンダ14により傾動支点12を中心にして荷台13を後方へ傾動させて、積載物を後方へ放出(ダンプ)可能としている。基台11には、前方へ向けて張出機体フレーム15を張り出し状に設けている。張出機体フレーム15上には、左側に床部16を張設して、床部16上に運転部17を設ける一方、右側に原動機部18を配設している。運転部17の直上方には、天蓋支持体34を介して天蓋19を配設している。
左側の走行部10は、図5にも示すように、前後方向に延伸する走行フレーム20の前端部に左側走行用油圧モータMLを設け、左側走行用油圧モータMLの駆動軸21に駆動輪22を取り付けている。走行フレーム20の後端部には、従動輪支軸23を介して従動輪24を取り付けている。駆動輪22と従動輪24との間には、履帯25を巻回している。走行フレーム20の中途部には、転動輪26を取り付けて、転動輪26により履帯25の中途部を支持させている。右側の走行部10は、左側の走行部10と同様に構成しており、走行フレーム20の前端部には、右側走行用油圧モータMRを設けている。
運転部17は、図3及び図4に示すように、床部16の中央部に支持ケース30を設け、支持ケース30の上に反転ケース31を水平面上にて反転可能に載設している。反転ケース31の上には、運転席41を載設している。そして、運転席41は、反転ケース31を反転させることで、前方と後方のいずれか一方に向けて配置可能として、オペレータが進行方向に向いて運転席41に着座できるようにしている。床部16の右側前部と左側後部には、それぞれ第1・第2アクセルペダル90,91を配設している。そして、運転席41に着座したオペレータが右足で第1・第2アクセルペダル90,91のいずれかを踏み込み操作することで、エンジンEの回転数を調整、つまり、機体の速度調整をするための操作具である。
反転ケース31の左側部には、左側操作ケース45を設け、左側操作ケース45の上端部から前上方へ向けて走行操作具としての走行用レバー47を突出させている。走行用レバー47は、前後左右方向に傾動操作可能として、傾動方向に機体を走行操作可能としている。ここで、走行用レバー47の傾動操作は、前記した第1・第2アクセルペダル90,91のいずれかを踏み込み操作に優先させている。つまり、第1・第2アクセルペダル90,91のいずれかを踏み込み操作しても、走行用レバー47を傾動操作しなければ、速度調整されないようにしている。走行用レバー47が中立位置では、機体の走行が停止されるようにしている。また、走行用レバー47は、傾倒操作していたオペレータが走行用レバー47から手を放すと、自動的に中立状態に復帰されるようにしている。
走行用レバー47の前側上端部には、モータ容量選択操作部としてのモータ容量選択スイッチSwを設けている。モータ容量選択スイッチSwは、走行用レバー47を把持した左手の指先で選択操作可能としている。本実施形態では、指先でモータ容量選択スイッチSwを繰り返し押すことにより、速度調整域である1速域(例えば、0〜5.6m/s)の段と2速域(例えば、5.7〜12m/s)の段とに変更可能としている。モータ容量選択スイッチSwは、後述する制御部C及びモータ容量選択部としてのモータ容量選択切換弁66を介して、順次、左・右側走行用油圧モータML,MRのモータ容量が1速域の段(低速段)と2速域の段(高速段)とに繰り返し切り替わるようにしており、1速域の段と2速域の段のいずれかのモータ容量を選択可能としている。
そして、走行用レバー47を傾倒操作することで、第1・第2アクセルペダル90,91、又は、後述するアクセルスイッチ37による速度調整(エンジン回転の調整)に応じた1速域の段と2速域の段のいずれかの速度調整域でモータ容量を増減させることができて、所望の速度で機体を走行させることができる。この際、1・2速域の段の各速度調整域における速度調整は、走行用レバー47の傾倒操作角度に正比例させている。
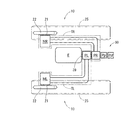
左側操作ケース45内の上部には、走行用パイロットバルブ46(図6参照)を配設している。走行用パイロットバルブ46は、図6に示すように、後述するパイロットポンプPpに走行用の一次側パイロット圧路50を介して流体的に接続する一方、後述する左・右斜板シリンダ81,83に走行用の二次側パイロット圧路51を流体的に接続している。一次側パイロット圧路50の中途部には、二位置切換式の電磁弁である走行用カットオフバルブ58を設けている。52a,52b,52cは、第1〜第3ドレーンブロック、53は、走行用パイロットバルブ46と第1ドレーンブロック52aとを流体的に接続する走行用戻し油路である。二次側パイロット圧路51の中途部には、床部16に設けた走行用切換弁48を介設している。走行用切換弁48は、反転ケース31の反転動作に連動して切換作動して、左右の油路が切換るようにしている。
走行用パイロットバルブ46には、各走行部10,10を走行操作する走行用レバー47の基端部(下端部)を連動連結している。左側操作ケース45の前面下部には、後述する油圧回路K(図6参照)を遮断・解除操作する左側遮断・解除レバー43を前上方へ向けて突出させている。49はレバーブーツである。
左側操作ケース45の上面中途部には、左側アームレスト44を走行用レバー47の後方に位置させて立設している。左側アームレスト44の上には、運転席41に着座したオペレータの前腕の肘側を載置するとともに、走行用レバー47の上端把持部を手で把持することで、走行用レバー47を前後左右側方向に傾倒操作可能としている。そして、走行用レバー47を前後左右方向に傾動操作することで、走行用パイロットバルブ46が切換作動されるようにしている。
具体的に説明すると、走行用レバー47が中立位置(傾動操作していない位置)にある時には、左・右側走行用モータML,MRが駆動停止される。そして、走行用レバー47から手を放すと、走行用レバー47は、中立位置に保持されて、機体は停止される。
走行用レバー47を前(後)方向に傾動操作することで、左・右側走行用油圧モータML,MRを正(逆)転駆動させて、機体を前(後)方向に直進走行(図1では左(右)側方向)させることができる。
走行用レバー47を右(左)側前方向に傾動操作することで、左(右)側走行用油圧モータML(MR)を正転駆動させる一方、右(左)側走行用油圧モータMR(ML)を駆動停止させて、機体を右側方(左側方)へ前進旋回走行(ピボットターン)させることができる。
走行用レバー47を右(左)側後方向に傾動操作することで、右(左)側走行用油圧モータML(MR)を逆転駆動させる一方、左(右)側走行用油圧モータMR(ML)を駆動停止させて、機体を右側方(左側方)へ後進旋回走行(ピボットターン)させることができる。
走行用レバー47を右(左)方向に傾動操作することで、左(右)側走行用油圧モータML(MR)を正転駆動させるとともに、右(左)側走行用油圧モータMR(ML)を逆転駆動させることで、機体をその場で右側方(左側方)へ急旋回走行(スピンターン)させることができる。
反転ケース31の右側部には、右側操作ケース55を設け、右側操作ケース55の上端部から前上方へ向けてダンプ用レバー57を突出させている。右側操作ケース55内の上部には、ダンプ用パイロットバルブ56(図6参照)を配設している。ダンプ用パイロットバルブ56は、図6に示すように、ダンプ用の一次側パイロット圧路72を介してパイロットポンプPpに流体的に接続している。一次側パイロット圧路72の中途部には、二位置切換式の電磁弁である荷台カットオフバルブ75を設けている。また、ダンプ用パイロットバルブ56は、ダンプ用の二次側パイロット圧路73を介してダンプ用切換バルブ71に流体的に接続している。ダンプ用パイロットバルブ56は、ダンプ用圧油戻し油路74を介して第1ドレーンブロック52aに流体的に接続している。
右側操作ケース55の上面中途部には、右側アームレスト54をダンプ用レバー57の後方に位置させて立設している。右側アームレスト54の上には、運転席41に着座したオペレータの前腕の肘側を載置するとともに、ダンプ用レバー57の上端把持部を手で把持することで、ダンプ用レバー57を前後方向に傾倒操作可能としている。そして、ダンプ用レバー57を前後方向に傾動操作することで、ダンプ用パイロットバルブ56を介してダンプ用切換バルブ71が切換作動されるようにしている。
このように構成して、運転席41と左・右側操作ケース45,55は、反転ケース31を介して一体的に仮想水平面上で反転可能に配設している。運転席41に着座したオペレータは、左側操作ケース45に突設した走行用レバー47を左手で把持する一方、右側操作ケース55に突設したダンプ用レバー57を右手で把持して、各レバー47,57を適宜操作することができる。
原動機部18は、張出機体フレーム15上の右側部に、エンジンEとポンプ群60等(図6参照)を配設して、これらをボンネット33により被覆している。ボンネット33の天井部の内側には、操作パネル部35を載設しており、操作パネル部35には、パーキングブレーキスイッチ36やボリューム式のアクセルスイッチ37等を配設している。
ポンプ群60は、図5及び図6に示すように、エンジンEの駆動軸39に、左側走行用ポンプPLと右側走行用ポンプPRとパイロットポンプPpとダンプ用ポンプPdとを、直列的に連動連結している。
左側走行用ポンプPLには、左側走行用油圧路61を介して左側走行用油圧モータMLを流体的に接続して、左側静油圧式無段階変速装置(分離型左側HST:Hydro Static Transmission)TLを構成している。また、右側走行用ポンプPRには、右側走行用油圧路62を介して右側走行用油圧モータMRを流体的に接続して、右側静油圧式無段階変速装置(分離型右側HST)TRを構成している。そして、左・右側静油圧式無段階変速装置TL,TRは、それぞれ左右側の走行部10,10の駆動輪22,22に連動連結して、左・右側静油圧式無段階変速装置TL,TRにより各走行部10,10を無段階に変速可能としている。
ここで、左・右側走行用油圧ポンプPL,PRは、走行用レバー47の操作量(操作角度)に対応して吐出容量が変更される可変容量型としている。左・右側走行用油圧モータML,MRは、複数段(本実施形態では、1速域の段と2速域の段の二段)のモータ容量に切換選択可能とした可変容量型としている。各モータML,MRには、それぞれパイロット作動式の二位置切換式弁である左・右側容量変更バルブ63,64を設けており、左・右側容量変更バルブ63,64は、容量変更用圧路65を介してパイロットポンプPpに流体的に接続している。65L,65Rは、容量変更用圧路65の下流側に形成した左・右側分岐圧路である。容量変更用圧路65の中途部には、二位置切換式の電磁弁であるモータ容量選択切換弁66を設けている。モータ容量選択切換弁66は、後述する制御部Cの出力側に電気的に接続する一方、前記のように制御部Cの入力側にモータ容量選択スイッチSwを電気的に接続している。
ダンプ用ポンプPdは、図6に示すように、ダンプ用油圧路70を介してダンプシリンダ14に流体的に接続している。ダンプ用油圧路70の中途部には、三位置切換式弁であるダンプ用切換バルブ71を設けている。ダンプ用切換バルブ71は、ダンプ用の二次側パイロット圧路73を介してダンプ用パイロットバルブ56に流体的に接続している。ダンプ用パイロットバルブ56は、ダンプ用の一次側パイロット圧路72を介してパイロットポンプPpに流体的に接続している。ダンプ用パイロットバルブ56には、ダンプシリンダ14を伸縮作動操作するダンプ用レバー57の基端部(下端部)を連動連結している。
操作パネル部35に配設したパーキングブレーキスイッチ36は、左・右側走行用油圧モータML,MRを制動する左・右側パーキングブレーキBL,BR(図6参照)を操作するスイッチである。左・右側パーキングブレーキBL,BRは、図6に示すように、パイロットポンプPpにブレーキ圧路68を介して流体的に接続しており、ブレーキ圧路68の中途部には、二位置切換式の電磁弁であるブレーキカットオフバルブ38を設けている。ブレーキカットオフバルブ38は、図7に示すように、制御部Cの出力側に電気的に接続する一方、パーキングブレーキスイッチ36は、制御部Cの入力側に電気的に接続している。
そして、パーキングブレーキスイッチ36をON操作すると、制御部Cを介してブレーキカットオフバルブ38が切断作動され、左・右側パーキングブレーキBL,BR側に設けた摩擦板が左・右側走行用油圧モータML,MR側に設けた摩擦板に圧接されることで、ブレーキ制動されるようにしている。また、パーキングブレーキスイッチ36をOFF操作すると、制御部Cを介してブレーキカットオフバルブ38が接続作動され、左・右側パーキングブレーキBL,BR側に設けた摩擦板が左・右側走行用油圧モータML,MR側に設けた摩擦板から離隔されることで、ブレーキ制動が解除されるようにしている。
操作パネル部35に配設したアクセルスイッチ37は、機体を走行させる前に、あらかじめ手動で回転調整しておくことで、エンジンEの回転数を調整、つまり、機体の速度調整をしておくための調整スイッチである。
図6に示す油圧回路Kは、走行用の一次側パイロット圧路50、左・右側走行用パイロット圧路51L,51Rから成る走行用の二次側パイロット圧路51、走行用圧油戻し油路53、左側走行用油圧路61、右側走行用油圧路62、容量変更用圧路65、左・右側分岐圧路65L,65R、ブレーキ圧路68、ダンプ用の一次側パイロット圧路72、ダンプ用の二次側パイロット圧路73、ダンプ用圧油戻し油路74、及び、油圧タンクT等を具備している。
左側走行用パイロット圧路51Lは、走行用パイロットバルブ46と、可変容量形の左側走行用ポンプPLの左ポンプ斜板80を正転制御する複動形の左斜板シリンダ81と、を接続している。右側走行用パイロット圧路51Lは、走行用パイロットバルブ46と、可変容量形の右側走行用ポンプPRの右ポンプ斜板82を正転制御する複動形の右斜板シリンダ83と、を接続している。左・右側走行用パイロット圧路51L,51Rの中途部には、二位置切換式の電磁弁である走行用切換弁48を設けて、走行用切換弁48により左・右側走行用パイロット圧路51L,51Rの下流側を相互に切り換え可能としている。
走行用パイロットバルブ46と走行用切換弁48との間に位置する走行用の二次側パイロット圧路51の部分には、走行用レバー47の操作を検出する操作検出部としてのパイロット圧力センサSを設けている。パイロット圧力センサSは、走行用パイロットバルブ46の前進側又は後進側から出力されたパイロット圧を走行用の二次側パイロット圧路51から引き出して検出するセンサであり、図7に示す制御部Cの入力側に電気的に接続している。そして、パイロット圧力センサSの検出情報が制御部Cに送信されると、その検出情報に基づいて制御部Cがモータ容量選択切換弁66に制御信号を送信して、モータ容量選択切換弁66を切換制御するようにしている。
具体的に説明すると、パイロット圧力センサSがパイロット圧を検出した場合には、モータ容量選択スイッチSwによるモータ容量選択切換弁66の1速域の段(低速段)ないしは2速域の段(高速段)への切換操作が可能であるが、パイロット圧力センサSがパイロット圧を検出しない場合には、モータ容量選択切換弁66の切換状態(選択結果)に優先して、左・右側走行用油圧モータML,MRのモータ容量が大容量(1速域)の段(低速段)に強制的に設定されるようにしている。つまり、走行用レバー47が中立状態で傾倒操作されていない場合には、モータ容量選択切換弁66が1速域の段(低速段)と2速域の段(高速段)のいずれにあっても、1速域の段(低速段)に強制的に保持(固定)されるようにしている。
モータ容量選択スイッチSwを介してモータ容量選択切換弁66により小容量(2速域)の段(高速段)が選択されている際に、パイロット圧力センサSが走行用レバー47の傾倒操作を検出している状態から検出しない状態となった場合には、モータ容量が小容量(2速域)の段(高速段)から大容量(1速域)の段(低速段)に漸次シフトダウンされながら機体が走行停止されるようにしている。つまり、2速域の段(高速段)のモータ容量に設定された走行用レバー47が傾倒操作されている際に、走行用レバー47が中立位置に操作又は復帰されると、モータ容量が2速域の段(高速段)から1速域の段(低速段)に変更されながら機体が走行停止されるようにしている。
モータ容量選択スイッチSwを介してモータ容量選択切換弁66により小容量(2速域)の段(高速段)が選択されている際に、パイロット圧力センサSが走行用レバー47の傾倒操作を検出していない状態から検出している状態となった場合には、モータ容量が大容量(1速域)の段(低速段)から小容量(2速域)の段(高速段)に漸次シフトアップされながら増速されるようにしている。つまり、2速域の段(高速段)のモータ容量に設定された走行用レバー47が傾倒操作されている際に、一旦、走行用レバー47が中立位置に操作又は復帰されると、モータ容量が1速域の段(低速段)に強制的にシフトダウン(変更)され、その後に走行用レバー47が傾倒操作されると、モータ容量が2速域の段(高速段)に自動的にシフトアップされて復元されるようにしている。
このように構成された建設機械Aは、例えば、上り坂の傾斜地において走行用レバー47が中立状態に操作又は復帰されて機体が走行停止した際には、モータ容量が1速域の段(低速段)に強制的に保持(固定)される。そのため、左・右側走行用油圧ポンプPL,PRや左・右側走行用油圧モータML,MRの油圧の洩れにより、機体が傾斜地に沿って下降したとしても、モータ容量が低速段である1速域の段に保持されて、機体の下降量が抑制される。そのため、不慮の事態が発生するのを回避することができる。
この際、2速域の段(高速段)のモータ容量に設定された走行用レバー47が傾倒操作されている際に、走行用レバー47が中立位置に操作又は復帰されると、モータ容量が2速域の段(高速段)から1速域の段(低速段)に変更されながら機体が走行停止されるため、機体はスムーズに停止される。
また、2速域の段(高速段)のモータ容量に設定された走行用レバー47が傾倒操作されている際に、一旦、走行用レバー47が中立位置に操作又は復帰されると、モータ容量が1速域の段(低速段)に強制的にシフトダウン(変更)され、その後に走行用レバー47が傾倒操作されると、モータ容量が2速域の段(高速段)にシフトアップされて復元されるため、機体を円滑に増速走行させることができて、操作性を向上させることができる。
左・右側走行用モータML,MRは、左・右モータ斜板84,85の傾斜角を低速側のピストンと高速側のピストンとにより変えることで、モータ容量が大容量と小容量とに変化する。モータ容量が大容量の時は、モータ回転数が減少して走行速度が低速になり、また、モータ容量が小容量の時は、モータ回転数が増加して走行速度が高速になる。低速側と高速側のピストンは、容量変更用圧路65を介して供給される圧油により左・右モータ斜板84,85の傾斜角を変えるように伸縮作動する。左・右モータ斜板84,85は、左・右側容量変更バルブ63,64を介して容量変更用圧路65に流体的に接続されている。
そして、容量変更用圧路65の中途部に設けたモータ容量選択切換弁66がモータ容量選択スイッチSwにより選択操作(切換操作)されると、左・右側容量変更バルブ63,64が1速域の段(低速段)と2速域の段(高速段)とのいずれかの段に切り換えられるようにしている。
制御部Cは、パーソナルコンピュータ等を用いて構成されるものである。図7に示すように、制御部Cの入力側には、パイロット圧力センサSと、モータ容量選択スイッチSwと、パーキングブレーキスイッチ36と、アクセルスイッチ37と、を電気的に接続している。制御部Cの出力側には、電磁弁である以下のモータ容量選択切換弁66と、ブレーキカットオフバルブ38と、走行用カットオフバルブ58と、荷台カットオフバルブ75と、走行用切換弁48と、を電気的に接続している。
制御部Cは、制御プログラムを内蔵しており、制御プログラムは、上記センサやスイッチ等からの入力情報に基づいて、上記電磁弁に制御情報を送信することで上記電磁弁を制御するようにプログラムされている。
図8は、制御プログラムのフローチャートである。図8に示すように、パイロット圧力センサSが走行用レバー47の中立状態を検出し(S100YES)、モータ容量が1速域の段に選択されていると(S110YES)、つまり、モータ容量選択スイッチSwによりモータ容量選択切換弁66が1速域の段に切り換えられていると、モータ容量選択切換弁66が制御部Cにより1速域の段に固定される(S120)。
パイロット圧力センサSが走行用レバー47の中立状態を検出することなく(S100NO)、走行用レバー47の傾倒状態を検出し(S130YES)、モータ容量が2速域の段に選択されていると、(S140YES)と、つまり、モータ容量選択スイッチSwによりモータ容量選択切換弁66が2速域の段に切り換えられていると、走行用レバー47が中立状態にあるか傾倒状態にあるかを制御部Cが判断する(S150)。この際、パイロット圧力センサSが走行用レバー47の中立状態を検出した場合には(S150YES)、モータ容量選択切換弁66が制御部Cにより1速域の段に強制的にシフトダウンされる(S160)。その後にパイロット圧力センサSが走行用レバー47の傾倒状態を検出すると(S170YES)、モータ容量選択切換弁66が制御部Cにより2速域の段に強制的にシフトアップされる(S180)。
モータ容量が1速域の段に選択されていない場合には(S110NO)、モータ容量が2速域の段に選択されていないか判断する(S140)。パイロット圧力センサSが走行用レバー47の傾倒状態を検出しない場合には(S170NO)、走行用レバー47が立状態にあるか傾倒状態にあるかを判断する(S150)。
このように、制御部Cは、走行用レバー47が中立状態にある場合には、モータ容量が1速域の段に固定されるように制御する。
A 建設機械
C 制御部
E エンジン
ML 左側走行用モータ
MR 右側走行用モータ
PL 左側走行用油圧ポンプ
PM 右側走行用油圧ポンプ
S パイロット圧力センサ
Sw モータ容量選択スイッチ
66 モータ容量選択切換弁
C 制御部
E エンジン
ML 左側走行用モータ
MR 右側走行用モータ
PL 左側走行用油圧ポンプ
PM 右側走行用油圧ポンプ
S パイロット圧力センサ
Sw モータ容量選択スイッチ
66 モータ容量選択切換弁
Claims (4)
- 走行操作具の操作に対応して吐出容量が変更される可変容量型の走行用油圧ポンプと、走行用油圧ポンプに流体接続されて、複数段のモータ容量に切換選択可能とした可変容量型の走行用油圧モータと、走行用油圧モータの複数段のモータ容量を選択するモータ容量選択部と、前記モータ容量選択部を操作するモータ容量選択操作部と、走行操作具の操作を検出する操作検出部と、前記操作検出部及び前記モータ容量選択操作部を入力側に接続する一方、出力側に前記モータ容量選択部を接続した制御部と、を具備し、
前記操作検出部が走行操作具の操作を検出しない場合には、前記モータ容量選択部の選択結果に優先して走行用油圧モータのモータ容量が大容量の段に設定されることを特徴とする建設機械。 - 前記モータ容量選択操作部を介して前記モータ容量選択部により小容量の段が選択されている際に、前記操作検出部が走行操作具の操作を検出している状態から検出しない状態となった場合には、モータ容量が小容量の段から大容量の段に漸次シフトダウンされながら走行停止されることを特徴とする請求項1記載の建設機械。
- 前記モータ容量選択操作部を介して前記モータ容量選択部により小容量の段が選択されている際に、操作検出部が走行操作具の操作を検出しない状態から検出している状態となった場合には、モータ容量が大容量の段から小容量の段に漸次シフトアップされながら増速されることを特徴とする請求項1記載の建設機械。
- 前記モータ容量選択操作部は、前記走行操作具に設けて、前記走行操作具を把持した手の指先で選択操作可能としていることを特徴とする請求項1〜3のいずれか1項記載の建設機械。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016122112A JP2017227231A (ja) | 2016-06-20 | 2016-06-20 | 建設機械 |
| PCT/JP2017/002524 WO2017221449A1 (ja) | 2016-06-20 | 2017-01-25 | 建設機械 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016122112A JP2017227231A (ja) | 2016-06-20 | 2016-06-20 | 建設機械 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017227231A true JP2017227231A (ja) | 2017-12-28 |
Family
ID=60784642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016122112A Pending JP2017227231A (ja) | 2016-06-20 | 2016-06-20 | 建設機械 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2017227231A (ja) |
| WO (1) | WO2017221449A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06213321A (ja) * | 1993-01-19 | 1994-08-02 | Teijin Seiki Co Ltd | 走行モータの油圧回路 |
| JPH06213320A (ja) * | 1993-01-19 | 1994-08-02 | Teijin Seiki Co Ltd | 走行モータの油圧回路 |
| JPH11315919A (ja) * | 1998-04-30 | 1999-11-16 | Mitsubishi Heavy Ind Ltd | 装軌車両の停止状態保持装置 |
| JP2014013056A (ja) * | 2012-07-04 | 2014-01-23 | Kanzaki Kokyukoki Mfg Co Ltd | 作業車両の走行制御装置 |
-
2016
- 2016-06-20 JP JP2016122112A patent/JP2017227231A/ja active Pending
-
2017
- 2017-01-25 WO PCT/JP2017/002524 patent/WO2017221449A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06213321A (ja) * | 1993-01-19 | 1994-08-02 | Teijin Seiki Co Ltd | 走行モータの油圧回路 |
| JPH06213320A (ja) * | 1993-01-19 | 1994-08-02 | Teijin Seiki Co Ltd | 走行モータの油圧回路 |
| JPH11315919A (ja) * | 1998-04-30 | 1999-11-16 | Mitsubishi Heavy Ind Ltd | 装軌車両の停止状態保持装置 |
| JP2014013056A (ja) * | 2012-07-04 | 2014-01-23 | Kanzaki Kokyukoki Mfg Co Ltd | 作業車両の走行制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017221449A1 (ja) | 2017-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9772018B2 (en) | Working machine | |
| US8479898B2 (en) | Work vehicle control device | |
| JPWO2008123376A1 (ja) | 静油圧式無段変速機を備えた車両の制御装置 | |
| US9140356B2 (en) | Travel control unit of working vehicle | |
| CN101535687B (zh) | 液压式行驶车辆的行驶控制装置 | |
| JP2013036276A (ja) | 作業機 | |
| JP2013036274A (ja) | 作業機 | |
| WO2012124767A1 (ja) | ホイールローダ | |
| CN112654752B (zh) | 轮式作业车辆 | |
| JP4439183B2 (ja) | ブレーキ制御機構 | |
| JP7091286B2 (ja) | 作業車両 | |
| US20220220704A1 (en) | Control device of work vehicle, work vehicle, and control method for work vehicle | |
| JP7155039B2 (ja) | 作業機 | |
| JP2013204783A (ja) | 作業車両 | |
| US20130110363A1 (en) | Hystat drive system having engine speed control | |
| JP2014119108A (ja) | 作業車 | |
| JP2021121765A (ja) | 作業機の油圧システム | |
| JP2009261285A (ja) | 乗用型作業機 | |
| CN101501368B (zh) | 液压驱动车辆的行驶控制装置 | |
| JP2017227231A (ja) | 建設機械 | |
| JP4589649B2 (ja) | ホイールローダのクラッチ制御装置およびホイールローダ | |
| JP7146665B2 (ja) | 作業機 | |
| JP2008163669A (ja) | 油圧式走行車両の走行制御装置 | |
| JP7155037B2 (ja) | 作業機 | |
| JP2001124200A (ja) | 作業車両の静油圧式無段変速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190903 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200303 |