JP2017503100A - 採掘坑車両及び採掘坑作業タスクの開始方法 - Google Patents
採掘坑車両及び採掘坑作業タスクの開始方法 Download PDFInfo
- Publication number
- JP2017503100A JP2017503100A JP2016563261A JP2016563261A JP2017503100A JP 2017503100 A JP2017503100 A JP 2017503100A JP 2016563261 A JP2016563261 A JP 2016563261A JP 2016563261 A JP2016563261 A JP 2016563261A JP 2017503100 A JP2017503100 A JP 2017503100A
- Authority
- JP
- Japan
- Prior art keywords
- mine
- point cloud
- control unit
- vehicle
- cloud data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B3/00—Rotary drilling
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/02—Drilling rigs characterised by means for land transport with their own drive, e.g. skid mounting or wheel mounting
- E21B7/025—Rock drills, i.e. jumbo drills
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21C—MINING OR QUARRYING
- E21C35/00—Details of, or accessories for, machines for slitting or completely freeing the mineral from the seam, not provided for in groups E21C25/00 - E21C33/00, E21C37/00 or E21C39/00
- E21C35/24—Remote control specially adapted for machines for slitting or completely freeing the mineral
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21C—MINING OR QUARRYING
- E21C41/00—Methods of underground or surface mining; Layouts therefor
- E21C41/16—Methods of underground mining; Layouts therefor
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21D—SHAFTS; TUNNELS; GALLERIES; LARGE UNDERGROUND CHAMBERS
- E21D9/00—Tunnels or galleries, with or without linings; Methods or apparatus for making thereof; Layout of tunnels or galleries
- E21D9/003—Arrangement of measuring or indicating devices for use during driving of tunnels, e.g. for guiding machines
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21D—SHAFTS; TUNNELS; GALLERIES; LARGE UNDERGROUND CHAMBERS
- E21D9/00—Tunnels or galleries, with or without linings; Methods or apparatus for making thereof; Layout of tunnels or galleries
- E21D9/003—Arrangement of measuring or indicating devices for use during driving of tunnels, e.g. for guiding machines
- E21D9/004—Arrangement of measuring or indicating devices for use during driving of tunnels, e.g. for guiding machines using light beams for direction or position control
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C7/00—Tracing profiles
- G01C7/06—Tracing profiles of cavities, e.g. tunnels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4808—Evaluating distance, position or velocity data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
- G05D1/0251—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means extracting 3D information from a plurality of images taken from different locations, e.g. stereo vision
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
- G05D1/2435—Extracting 3D information
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/246—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM]
- G05D1/2465—Arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM] using a 3D model of the environment
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mining & Mineral Resources (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Geology (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Environmental & Geological Engineering (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Optics & Photonics (AREA)
- General Engineering & Computer Science (AREA)
- Geometry (AREA)
- Evolutionary Computation (AREA)
- Computer Hardware Design (AREA)
- Earth Drilling (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Operation Control Of Excavators (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Architecture (AREA)
- Software Systems (AREA)
- Traffic Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
Description
Claims (12)
- 移動式キャリアと、
採掘坑内で採掘坑作業タスクを実行するための少なくとも1つの採掘坑作業デバイスと、
前記採掘坑車両の周囲をスキャンし、前記周囲の3Dスキャニングデータを生成するための少なくとも1つのスキャニングデバイスと
を備える採掘坑車両であって、
前記採掘坑車両は、データを受信して前記データを少なくとも1つのプロセッサで処理するように構成された少なくとも1つの制御ユニットと操作のための通信を行っており、
前記制御ユニットには、前記プロセッサで実行することが可能な少なくとも1つのポイントクラウド照合プログラムが提供されており、
初期の第1ポイントクラウドデータは前記制御ユニットに入力され、前記第1ポイントクラウドデータは採掘坑座標系での前記採掘坑の保存された基準モデルを備えており、
前記採掘坑車両の前記スキャニングデバイスによって生成された少なくとも1つの第2ポイントクラウドデータが前記制御ユニットに入力され、前記第2ポイントクラウドデータは前坑採掘坑車両の現在位置での操作のためのスキャニングデータを備えており、
前記制御ユニットは、前記操作のための第2ポイントクラウドデータを前記基準の第1ポイントクラウドデータと照合するため、前記ポイントクラウド照合プログラムを実行するように構成されており、
前記制御ユニットは、前記操作のためのポイントクラウドデータと前記基準クラウドデータとの間の前記決定された照合に基づいて、前記採掘坑座標系における前記採掘坑車両の位置と方向を決定するように構成されており、
前記制御ユニットには、前記採掘坑座標系における採掘坑作業現場の位置及び前記採掘坑作業現場で実行される採掘坑作業タスクを定義する少なくとも1つの採掘坑作業計画が提供されており、更に
前記制御ユニットは、前記採掘坑作業現場で前記採掘坑作業タスクを開始するため、前記採掘坑車両の前記決定された位置と前記採掘坑作業計画の位置とを関連付けるように構成されている、採掘坑車両。 - 前記制御ユニットは、前記採掘坑車両が動作している前記採掘坑の領域又は区域を決定するように構成されており、前記位置データに基づいて、前記制御ユニットは前記スキャンされた第2ポイントクラウドデータを前記採掘坑の一部のポイントクラウドデータと比較するように構成されており、その際、専用の限定されたポイントクラウドデータが前記比較における前記基準データとしての役割を果たす、請求項1に記載の採掘坑車両。
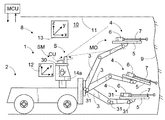
- 前記採掘坑車両は、掘削ユニットが搭載された少なくとも1つの掘削ブームを備える削岩リグであり、
前記制御ユニットには、前記採掘坑作業計画としての役割を果たし、前記採掘坑内の前記所定の掘削位置で掘削されるラウンドに対して、幾つかの掘削孔の位置と方向を前記採掘坑座標系で定義する、少なくとも1つの掘削パターンが提供され、
前記制御ユニットは、前記掘削位置で前記掘削を開始するため、前記削岩リグの前記決定された位置と前記掘削パターンの前記位置とを関連付けるように構成されている、請求項1又は2に記載の採掘坑車両。 - 前記採掘坑車両は、坑道ラインと前記坑道ラインの深さ方向の実際の切羽面とを備える掘削された岩盤空間内で操作可能であり、
前記採掘坑車両には、前記切羽面を検出するための手段及び深さ方向で前記坑道ラインに対する前記切羽面の位置を決定するための手段が提供され、
前記制御ユニットは、前記実際の切羽面の前記決定された深さ位置に基づいて、前記採掘坑作業計画の前記位置を定義するように構成されている、請求項1から3のいずれか一項に記載の採掘坑車両。 - 前記採掘坑車両は、前記坑道ラインの前記深さ方向で前記坑道切羽面の最大深度を決定するための測定手段を備え、
前記制御ユニットは、前記切羽面の前記位置を定義するため前記検出された最大深度を決定するように構成されている、請求項4に記載の採掘坑車両。 - 前記スキャニングデバイスは、前記実際の切羽面に向かってスキャンするように配置されており、座標を伴うポイントクラウドデータは、これまでに掘削された少なくとも1つのラウンドの実際の表面から生成され、
前記制御ユニットは、前記生成されたポイントクラウドデータに基づいて、実際の表面の特性を決定するように構成されている、請求項1から5のいずれか一項に記載の採掘坑車両。 - 前記採掘坑車両は少なくとも1つのブームを備え、前記採掘坑作業デバイスは前記ブームの遠位部分に配置されており、更に
前記ブームは搭載されており、前記キャリアに対する前記切羽面の位置は、前記切羽面に接する採掘坑作業デバイスを配置すること、及び測定デバイスを含む搭載されたブームによって前記切羽面の位置を決定することによって決定される、請求項5又は6に記載の採掘坑車両。 - 前記採掘坑作業デバイスの位置と方向は前記採掘坑車両の前記周囲をスキャンすることによって決定され、これによって、前記採掘坑作業デバイスのポイントクラウドデータは作成され、
前記少なくとも1つの制御ユニットには、前記採掘坑作業デバイスの基準ポイントクラウドデータが提供され、更に
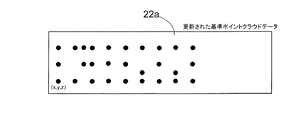
少なくとも1つのポイントクラウド処理プログラムは、前記スキャンされたポイントクラウドデータ内で前記採掘坑作業デバイスを探して検出し、前記採掘坑作業デバイスの位置と方向を決定するため、前記スキャンされたポイントと前記基準ポイントクラウドデータとを比較するための少なくとも1つの制御ユニット内で実行される、請求項1から6のいずれか一項に記載の採掘坑車両。 - 前記制御ユニットには、前記採掘坑の3Dモデルを含む採掘坑計画が提供され、
前記採掘坑の前記3Dモデルは、採掘坑座標系によるポイントクラウドデータを含み、
前記制御ユニットは、前記検出された位置との関係で、前記採掘坑の前記3Dモデルを有するスキャニングデバイスにより、前記生成されたポイントクラウドデータを比較するように構成されており、また、新しく作られた又は変化した壁が検出され記録されることを可能にする、前記スキャンされた位置での新しい又は変化した周囲のポイントクラウドデータを前記スキャニングデータ中で検出するように構成されており、
前記制御ユニットは、前記新しいポイントクラウドデータを前記採掘坑の前記3Dモデルの前記ポイントクラウドデータに組み込むように構成されており、これにより、前記採掘坑制御ユニットは、前記スキャニングデータに基づいて前記採掘坑の3Dモデルを更新するように構成されている、請求項1から8のいずれか一項に記載の採掘坑車両。 - 前記制御ユニットは、前記周囲の表面のポイントクラウドデータを抽出し、前記他のすべての対象物のポイントクラウドデータを取り除くことによって、前記受信したスキャニングデータを処理するように構成されており、これによって、前記周囲の表面の単純化されたポイントクラウドデータが作成される、請求項9に記載の採掘坑車両。
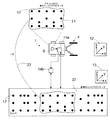
- 少なくとも1つのスキャニングデバイスを備える採掘坑車両の位置と方向を決定するための制御ユニットであって、前記制御ユニットは、
少なくとも1つのスキャニングデバイスを備える前記採掘坑車両と操作のための通信を行うための接続手段と、
前記採掘坑車両の前記現在位置での操作のためのスキャニングデータであって、前記少なくとも1つのスキャニングデバイスによって生成される操作のための第2ポイントクラウドデータを含むスキャニングデータを前記採掘坑車両から受信するための受信手段と、
前記受信した操作のためのスキャニングデータを処理するための処理手段とを含み、
前記制御ユニットには、前記プロセッサで実行されることが可能な少なくとも1つのポイントクラウド照合プログラムが提供され、
前記制御ユニットには、採掘坑座標系での前記採掘坑の保存された基準モデルを含む初期の第1ポイントクラウドデータが提供され、
前記制御ユニットは、前記受信した操作のための第2ポイントクラウドデータを前記基準の第1ポイントクラウドデータと照合するため、前記ポイントクラウド照合プログラムを実行するように構成されており、
前記制御ユニットは、前記操作のためのポイントクラウドデータと前記基準クラウドデータとの間の前記決定された照合に基づいて、前記採掘坑座標系による前記採掘坑車両の位置と方向を決定するように構成されており、
前記制御ユニットには、前記採掘坑座標系による採掘坑作業現場の位置及び前記採掘坑作業現場で実行される採掘坑作業タスクを定義する少なくとも1つの採掘坑作業計画が提供され、更に
前記制御ユニットは、前記採掘坑作業現場で前記採掘坑作業タスクを開始するため、前記採掘坑車両の前記決定された位置と前記採掘坑作業計画の前記位置とを関連付けるように構成されている、制御ユニット。 - 採掘坑作業現場で採掘坑作業タスクを開始する方法であって、前記方法は、
採掘坑内で採掘坑車両を位置決めすることと、
前記採掘坑車両の少なくとも1つの搭載スキャニングデバイスによって、前記採掘坑車両の前記周囲の少なくとも1つの操作のためのスキャニングを実行することと、
ポイントクラウド照合プログラムを備える少なくとも1つの制御ユニットに、前記周囲の操作可能なスキャニングで生成された少なくとも1つの操作のためのポイントクラウドデータを入力することと、
3D採掘坑モデルのポイントクラウドデータを前記制御ユニットに入力して、これを前記採掘坑の基準ポイントクラウドデータとして使用することであって、前記基準データは採掘坑座標系による前記基準ポイントクラウドデータの座標を含む使用することと、
前記操作のためのポイントクラウドデータと前記規準ポイントクラウドデータとの間の照合ポイントを探すため、前記制御ユニットのプロセッサ内でポイントクラウド照合プログラムを実行することと、
前記採掘坑座標系で前記採掘坑車両の位置と方向を決定するための前記照合プロセスの結果を利用することと、
前記制御ユニットに、前記採掘坑座標系による採掘坑作業現場の位置及び前記採掘坑作業現場で実行される採掘坑作業タスクを定義する少なくとも1つの採掘坑作業計画も提供することと、
前記採掘坑作業現場で前記採掘坑作業タスクを開始するため、前記採掘坑車両の前記決定された位置と前記採掘坑作業計画の前記位置とを関連付けることと
を含む方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2014/050598 WO2015106799A1 (en) | 2014-01-14 | 2014-01-14 | Mine vehicle, mine control system and mapping method |
| EPPCT/EP2014/050598 | 2014-01-14 | ||
| PCT/EP2015/050565 WO2015107068A1 (en) | 2014-01-14 | 2015-01-14 | Mine vehicle and method of initiating mine work task |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017503100A true JP2017503100A (ja) | 2017-01-26 |
| JP6273041B2 JP6273041B2 (ja) | 2018-01-31 |
Family
ID=49958476
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016563261A Active JP6273041B2 (ja) | 2014-01-14 | 2015-01-14 | 採掘坑車両及び採掘坑作業タスクの開始方法 |
Country Status (12)
| Country | Link |
|---|---|
| US (3) | US10174614B2 (ja) |
| EP (1) | EP3094805A1 (ja) |
| JP (1) | JP6273041B2 (ja) |
| KR (1) | KR101917937B1 (ja) |
| CN (1) | CN105917067B (ja) |
| AU (3) | AU2015206035B2 (ja) |
| BR (1) | BR112016016301B1 (ja) |
| CA (3) | CA2936683C (ja) |
| CL (3) | CL2016001754A1 (ja) |
| EA (1) | EA034130B1 (ja) |
| PE (1) | PE20160975A1 (ja) |
| WO (4) | WO2015106799A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018155590A1 (ja) * | 2017-02-24 | 2018-08-30 | 国立研究開発法人理化学研究所 | 写真画像に映ったトンネル内の壁面の位置を同定する同定装置、同定方法、ならびに、プログラム |
| JP2019169018A (ja) * | 2018-03-26 | 2019-10-03 | 前田建設工業株式会社 | 建設現場における資機材搬送システム |
| KR102225146B1 (ko) * | 2019-12-13 | 2021-03-10 | 주식회사 이에스피 | 광산 안전관리를 위한 갱내 차량 v2x 시스템 및 광산 안전 관리 방법 |
| KR102246499B1 (ko) * | 2019-12-13 | 2021-05-04 | 주식회사 이에스피 | 광산 안전 통합관리 시스템 및 방법 |
Families Citing this family (109)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2015241937B2 (en) * | 2014-03-31 | 2018-02-08 | Komatsu Ltd. | Mine management system |
| US9850109B2 (en) * | 2014-12-23 | 2017-12-26 | Manitowoc Crane Companies, Llc | Crane 3D workspace spatial techniques for crane operation in proximity of obstacles |
| US10822208B2 (en) | 2014-12-23 | 2020-11-03 | Manitowoc Crane Companies, Llc | Crane 3D workspace spatial techniques for crane operation in proximity of obstacles |
| US10162353B2 (en) | 2015-03-03 | 2018-12-25 | PreNav, Inc. | Scanning environments and tracking unmanned aerial vehicles |
| WO2016159839A1 (en) * | 2015-03-30 | 2016-10-06 | Volvo Construction Equipment Ab | System and method for determining the material loading condition of a bucket of a material moving machine |
| KR20170113604A (ko) * | 2015-09-30 | 2017-10-12 | 가부시키가이샤 고마쓰 세이사쿠쇼 | 화상 데이터 생성 방법 |
| US10248299B2 (en) * | 2015-11-10 | 2019-04-02 | Dassault Systemes Canada Inc. | Ensuring tunnel designs stay within specified design parameters and tolerances |
| US10349035B2 (en) * | 2015-11-16 | 2019-07-09 | Abb Schweiz Ag | Automatically scanning and representing an environment having a plurality of features |
| US10341639B2 (en) * | 2015-11-16 | 2019-07-02 | Abb Schweiz Ag | Automatically scanning and representing an environment with collision avoidance |
| ITUB20159252A1 (it) * | 2015-12-28 | 2017-06-28 | Termigas S P A | Apparato e metodo per eseguire fori per il montaggio di elementi di attrezzature su pareti di galleria |
| JP6754594B2 (ja) * | 2016-03-23 | 2020-09-16 | 株式会社小松製作所 | モータグレーダ |
| US9945668B2 (en) * | 2016-03-29 | 2018-04-17 | Queen's University At Kingston | Tunnel convergence detection apparatus and method |
| US10564270B2 (en) | 2016-04-13 | 2020-02-18 | Caterpillar Inc. | Methods and systems for calibrating sensors |
| US10570736B2 (en) | 2016-06-09 | 2020-02-25 | Abb Schweiz Ag | Robot automated mining |
| CN105856258B (zh) * | 2016-06-15 | 2018-04-24 | 徐华英 | 一种反地雷机器人 |
| GB2551711B (en) * | 2016-06-24 | 2019-12-11 | Jaguar Land Rover Ltd | Path identification for off-road cruise control |
| US11772647B2 (en) | 2016-06-24 | 2023-10-03 | Jaguar Land Rover Limited | Control system for a vehicle |
| GB2552940B (en) * | 2016-08-08 | 2020-01-22 | Jaguar Land Rover Ltd | Path identification for off-road cruise control |
| WO2018009980A1 (en) | 2016-07-15 | 2018-01-18 | Fastbrick Ip Pty Ltd | Boom for material transport |
| AU2017294796B2 (en) | 2016-07-15 | 2019-05-30 | Fastbrick Ip Pty Ltd | Brick/block laying machine incorporated in a vehicle |
| JP6727971B2 (ja) * | 2016-07-19 | 2020-07-22 | 株式会社クボタ | 作業車 |
| US10094216B2 (en) * | 2016-07-22 | 2018-10-09 | Caterpillar Global Mining Europe Gmbh | Milling depth compensation system and method |
| US10106951B2 (en) * | 2016-09-21 | 2018-10-23 | Deere & Company | System and method for automatic dump control |
| AU2017367754B2 (en) * | 2016-12-02 | 2023-09-21 | 1854081 Ontario Ltd. | Apparatus and method for preparing a blast hole in a rock face during a mining operation |
| CA3051425A1 (en) | 2017-02-02 | 2018-08-09 | PreNav, Inc. | Tracking image collection for digital capture of environments, and associated systems and methods |
| SE540915C2 (en) * | 2017-02-27 | 2018-12-18 | Epiroc Rock Drills Ab | Method and system for generating a drilling pattern, a computer program, a computer-readable medium and a rock drilling rig |
| GB2576840B (en) * | 2017-04-13 | 2022-10-12 | Joy Global Underground Mining Llc | System and method for measuring and aligning roof bolts |
| EP3415390B1 (en) * | 2017-06-12 | 2024-03-27 | Hexagon Geosystems Services AG | Driving assistance system for reversing a mining haulage vehicle |
| EP3649616B1 (en) | 2017-07-05 | 2025-01-08 | Fastbrick IP Pty Ltd | Real time position and orientation tracker |
| AU2018317936B2 (en) | 2017-08-17 | 2024-09-12 | Fastbrick Ip Pty Ltd | Interaction system configuration |
| CN111226090B (zh) | 2017-08-17 | 2023-05-23 | 快砖知识产权私人有限公司 | 具有改进的横滚角测量的激光跟踪器 |
| CN111212799B (zh) | 2017-10-11 | 2023-04-14 | 快砖知识产权私人有限公司 | 用于传送物体的机器以及与其一起使用的多隔间转盘 |
| FR3073557B1 (fr) * | 2017-11-13 | 2023-12-29 | Dodin Campenon Bernard | Procede de controle et/ou de guidage de la realisation d'une excavation |
| US11383679B2 (en) | 2017-12-01 | 2022-07-12 | Volvo Truck Corporation | Method for maintenance of a vehicle |
| GB2571528A (en) | 2018-02-28 | 2019-09-04 | Rolls Royce Plc | Controlling a robot in an environment |
| WO2019182811A1 (en) | 2018-03-20 | 2019-09-26 | Pcms Holdings, Inc. | System and method for dynamically adjusting level of details of point clouds |
| KR102857298B1 (ko) | 2018-03-20 | 2025-09-08 | 피씨엠에스 홀딩스, 인크. | 우선 변환에 기반한 동적 포인트 클라우드를 최적화하는 시스템 및 방법 |
| CN110389350B (zh) * | 2018-04-16 | 2023-08-22 | 诺瓦特伦有限公司 | 运土机、测距仪布置和3d扫描方法 |
| US10982541B2 (en) | 2018-06-01 | 2021-04-20 | Joy Global Underground Mining Llc | Methods and systems for controlling the heading of a mining machine |
| CN108843331B (zh) * | 2018-07-06 | 2019-10-11 | 山东科技大学 | 一种等效钻孔面积下小直径钻孔联合卸压布置方法 |
| CN112689552A (zh) | 2018-07-16 | 2021-04-20 | 快砖知识产权私人有限公司 | 主动阻尼系统 |
| WO2020014737A1 (en) | 2018-07-16 | 2020-01-23 | Fastbrick Ip Pty Ltd | Backup tracking for an interaction system |
| CN109100744B (zh) * | 2018-07-27 | 2021-03-30 | 深圳蓝胖子机器人有限公司 | 用于agv的目标定位方法及系统 |
| US11002075B1 (en) | 2018-07-31 | 2021-05-11 | J.H. Fletcher & Co. | Mine drilling system and related method |
| JP7118803B2 (ja) * | 2018-08-15 | 2022-08-16 | 鹿島建設株式会社 | トンネル施工システム及びトンネルの施工方法 |
| CN109268015B (zh) * | 2018-08-30 | 2020-03-17 | 上海隧道工程有限公司 | 基于非连续通视下顶管法联络通道施工的导向系统及方法 |
| RS64904B1 (sr) | 2018-11-30 | 2023-12-29 | Sandvik Mining & Construction Oy | Generisanje modela za planiranje trase ili pozicioniranje mobilnog objekta u podzemnom gradilištu |
| EP3660453B1 (en) | 2018-11-30 | 2023-11-29 | Sandvik Mining and Construction Oy | Positioning of mobile object in underground worksite |
| KR20210098534A (ko) * | 2018-12-13 | 2021-08-10 | 콘티넨탈 오토모티브 게엠베하 | 포지셔닝을 위한 환경 모델을 생성하기 위한 방법 및 시스템 |
| EP3895431A1 (en) | 2018-12-14 | 2021-10-20 | PCMS Holdings, Inc. | System and method for procedurally colorizing spatial data |
| SE1851620A1 (en) * | 2018-12-20 | 2020-06-21 | Epiroc Rock Drills Ab | Method and device for determining the position of a mining and/or construction machine |
| CN109403946B (zh) * | 2018-12-27 | 2022-07-29 | 北京三一智造科技有限公司 | 旋挖钻机回转动画显示的方法、装置及旋挖钻机 |
| US11048254B2 (en) * | 2019-04-10 | 2021-06-29 | Waymo Llc | Generating simplified object models to reduce computational resource requirements for autonomous vehicles |
| CN110118550B (zh) * | 2019-05-14 | 2021-02-05 | 中国矿业大学 | 一种综采工作面高精度三维导航地图的生成系统及方法 |
| EP3739419B1 (en) * | 2019-05-14 | 2021-11-10 | Sandvik Mining and Construction Oy | Autonomous mine vehicle operation |
| US11607804B2 (en) * | 2019-05-28 | 2023-03-21 | X Development Llc | Robot configuration with three-dimensional lidar |
| CN110295917B (zh) * | 2019-05-29 | 2021-06-04 | 中国铁建重工集团股份有限公司 | 凿岩台车翼展装置 |
| EP3754157A1 (en) | 2019-06-17 | 2020-12-23 | Sandvik Mining and Construction Oy | Underground worksite passage and model generation for path planning |
| EP3754450B1 (en) | 2019-06-17 | 2022-04-27 | Sandvik Mining and Construction Oy | Autonomous vehicle monitoring |
| AU2020202698B2 (en) * | 2019-07-18 | 2025-02-27 | Commonwealth Scientific And Industrial Research Organisation | Machine Guidance Integration |
| CN110428419A (zh) * | 2019-09-02 | 2019-11-08 | 中国矿业大学(北京) | 基于移动图像识别的矿井定位系统 |
| FI3789579T3 (fi) * | 2019-09-05 | 2023-03-02 | Sandvik Mining & Construction Oy | Laite, menetelmä ja ohjelmistotuote porauksen sarjan suunnittelemiseksi |
| EP3796264A1 (en) | 2019-09-20 | 2021-03-24 | Sandvik Mining and Construction Oy | Modelling of underground worksite |
| EP3798408B1 (en) * | 2019-09-27 | 2024-01-10 | Sandvik Mining and Construction Oy | Method, apparatus, rock drilling rig and computer program product for mining navigation |
| JP7300955B2 (ja) * | 2019-10-01 | 2023-06-30 | 株式会社トプコン | 土木工事データ処理装置、土木工事データ処理方法および土木工事データ処理用プログラム |
| CN110700839B (zh) * | 2019-10-21 | 2021-08-13 | 北京易联创安科技发展有限公司 | 一种基于激光扫描仪的掘进机位姿测量装置及其测量方法 |
| EP3839203A1 (en) * | 2019-12-16 | 2021-06-23 | Sandvik Mining and Construction Oy | Mine vehicle safety control |
| EP3839197B1 (en) * | 2019-12-19 | 2023-10-11 | Sandvik Mining and Construction Oy | Positioning apparatus, rock drilling rig and method for positioning |
| CN111273270A (zh) * | 2020-03-17 | 2020-06-12 | 北京宸控科技有限公司 | 一种掘进机定位定向方法 |
| MX2022013105A (es) | 2020-04-22 | 2023-01-19 | Fastbrick Ip Pty Ltd | Aparato de transferencia de bloques y ensamble de sujecion mejorado para su uso con el mismo. |
| CN111622295A (zh) * | 2020-04-22 | 2020-09-04 | 浙江大学 | 一种挖掘机行驶安全系统和方法 |
| CN111520146B (zh) * | 2020-04-29 | 2021-08-31 | 重庆市能源投资集团有限公司 | 基于水力压裂技术的煤矿岩石巷道掘进方法 |
| CN111578894B (zh) * | 2020-06-02 | 2021-10-15 | 北京经纬恒润科技股份有限公司 | 一种确定障碍物航向角的方法及装置 |
| AU2021290659A1 (en) * | 2020-06-18 | 2023-01-05 | Commonwealth Scientific And Industrial Research Organisation | Navigation of an underground mining machine |
| CN111897321B (zh) * | 2020-06-19 | 2023-08-11 | 中国煤炭科工集团太原研究院有限公司 | 一种井下特种车辆的无人驾驶系统 |
| CN111622667A (zh) * | 2020-07-02 | 2020-09-04 | 辽宁工程技术大学 | 一种综采工作面过断层智能钻孔系统及方法 |
| WO2022006635A1 (en) | 2020-07-08 | 2022-01-13 | Fastbrick Ip Pty Ltd | Adhesive application system |
| CN114063090B (zh) * | 2020-07-29 | 2025-05-09 | 北京图森未来科技有限公司 | 一种可移动设备的定位方法、装置及可移动设备 |
| EP3961267B1 (en) | 2020-09-01 | 2025-05-07 | Sandvik Mining and Construction Oy | Underground worksite vehicle positioning control |
| PL3961340T3 (pl) | 2020-09-01 | 2023-10-16 | Sandvik Mining And Construction Oy | Sterowanie ustawieniem pojazdu w podziemnym miejscu pracy wyrobiskowej |
| AU2020468174A1 (en) * | 2020-09-15 | 2023-03-02 | Sandvik Mining And Construction Oy | Mining machine with a support structure for measurement sensors |
| CA3191523A1 (en) * | 2020-09-15 | 2022-03-24 | Jussi Puura | Visual driving assistance system for a mining machine |
| MX2023003558A (es) * | 2020-09-28 | 2023-06-08 | J H Fletcher & Co | Empernadora de techo autónoma con sensor y métodos relacionados. |
| CN112327842B (zh) * | 2020-10-29 | 2022-06-03 | 深圳市普渡科技有限公司 | 机器人定位充电桩的方法及系统 |
| WO2022099356A1 (en) | 2020-11-10 | 2022-05-19 | Dyno Nobel Asia Pacific Pty Limited | Systems and methods for determining water depth and explosive depth in blastholes |
| CA3201436A1 (en) * | 2020-11-13 | 2022-05-19 | Enaex Servicios S.A. | System and process for the robotic loading of explosives in underground mining |
| CN116783456A (zh) | 2021-01-12 | 2023-09-19 | 山特维克矿山工程机械有限公司 | 地下工地模型生成 |
| US12163428B2 (en) | 2021-02-22 | 2024-12-10 | Off-World, Inc. | Microwave energy applicator |
| AU2022221587B2 (en) * | 2021-02-22 | 2025-06-05 | Universal Field Robots Pty Ltd | Apparatus and method for positioning equipment relative to a drill |
| CN113267140B (zh) * | 2021-05-10 | 2022-09-23 | 贵州大学 | 一种隧道超挖欠挖检测的装置和检测方法 |
| CN113639688B (zh) * | 2021-07-19 | 2024-03-15 | 江苏徐工工程机械研究院有限公司 | 一种凿岩臂架、凿岩台车及凿岩臂架传感器校准方法 |
| CN114506212B (zh) * | 2022-02-15 | 2023-09-22 | 国能神东煤炭集团有限责任公司 | 梭车的空间定位辅助驾驶系统和方法 |
| WO2023191672A1 (en) * | 2022-03-30 | 2023-10-05 | Epiroc Rock Drills Aktiebolag | A cover system, an electronics equipment operating system and a mining machine |
| EP4261646B1 (en) * | 2022-04-14 | 2025-09-10 | Sandvik Mining and Construction Oy | Scanner emulation for mining vehicle |
| CN115126494B (zh) * | 2022-06-13 | 2025-06-17 | 中煤科工机器人科技有限公司 | 一种巷道修复机 |
| EP4322119A1 (en) * | 2022-08-12 | 2024-02-14 | Sandvik Mining and Construction Oy | Data processing |
| CN116291486A (zh) * | 2023-03-20 | 2023-06-23 | 中国铁建重工集团股份有限公司 | 凿岩台车施工方法、装置、凿岩台车及存储介质 |
| CN116858098B (zh) * | 2023-08-15 | 2024-02-09 | 中国铁路经济规划研究院有限公司 | 一种建设期隧道多元信息自动化采集方法和系统 |
| CN119531947B (zh) * | 2023-08-30 | 2025-10-03 | 中国石油天然气集团有限公司 | 一种井控应急抢险设备的远程操控方法及装置 |
| EP4534797A1 (en) * | 2023-10-06 | 2025-04-09 | Sandvik Mining and Construction Oy | Determining position for a bolt of a bolt fan |
| EP4571040B1 (en) * | 2023-12-11 | 2026-03-25 | Sandvik Mining and Construction Oy | Controlling of a mining machine |
| CN117627528B (zh) * | 2024-01-25 | 2024-05-03 | 中建五局第三建设有限公司 | 一种深基坑用锚杆钻机的施工装置及其施工方法 |
| CN117706563B (zh) * | 2024-02-05 | 2024-05-07 | 中南大学 | 矿井垂直断面钻孔定位方法、系统、设备及存储介质 |
| KR20250145827A (ko) * | 2024-03-29 | 2025-10-13 | 주식회사 한화 | 발파공의 자동설계가 가능한 천공장치 및 이를 이용한 발파공의 천공방법 |
| EP4671487A1 (en) * | 2024-06-25 | 2025-12-31 | Sandvik Mining and Construction Oy | ORDER FOR A PROTECTIVE COVER ON A DRILLING EQUIPMENT'S SWEEPING DEVICE |
| WO2026010536A1 (en) * | 2024-07-04 | 2026-01-08 | Epiroc Rock Drills Aktiebolag | Method and system for updating a representation of a mining environment |
| CN119142332B (zh) * | 2024-11-20 | 2025-01-28 | 山西承信新能源科技装备有限公司 | 井下无轨胶轮车驾驶车辆的自适应速度控制方法及系统 |
| CN119288626B (zh) * | 2024-11-26 | 2025-11-25 | 中煤科工集团重庆研究院有限公司 | 用于井下施工现场的监测预警处理系统及方法 |
| CN120251317B (zh) * | 2025-04-14 | 2025-09-26 | 山东黄金矿业股份有限公司新城金矿 | 金属矿山井下随行供电装置及掘进设备 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996022547A2 (en) * | 1995-01-20 | 1996-07-25 | Tamrock Oy | A method for determining the position of a tool of a rock drill |
| EP1176393A2 (en) * | 2000-07-17 | 2002-01-30 | Inco Limited | Self-contained mapping and positioning system utilizing point cloud data |
| WO2007000488A1 (en) * | 2005-06-27 | 2007-01-04 | Sandvik Mining And Construction Oy | Arrangement for positioning drilling unit |
| JP2008025163A (ja) * | 2006-07-20 | 2008-02-07 | Enzan Kobo:Kk | 削岩機搭載台車における穿孔位置決め制御方法及び建設機械におけるブーム位置決め制御方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NO149117C (no) * | 1981-04-29 | 1984-02-29 | Furuholmen As | Fremgangsmaate og anordning for innstilling av en fjellboreriggs foeringsskinne i gitt avstand fra borestedet |
| US4514796A (en) * | 1982-09-08 | 1985-04-30 | Joy Manufacturing Company | Method and apparatus for controlling the position of a hydraulic boom |
| FI110806B (fi) * | 2000-03-17 | 2003-03-31 | Sandvik Tamrock Oy | Järjestely miehittämättömien kaivosajoneuvojen paikan määrittämiseksi |
| FI115678B (fi) * | 2003-03-25 | 2005-06-15 | Sandvik Tamrock Oy | Järjestely kaivosajoneuvon törmäyksenestoon |
| EP1600564A1 (de) * | 2004-05-24 | 2005-11-30 | Leica Geosystems AG | Verfahren zur Steuerung einer oberflächenverändernden Maschine |
| US20050283294A1 (en) * | 2004-06-16 | 2005-12-22 | Lehman Allen A Jr | Method and apparatus for machine guidance at a work site |
| WO2006084385A1 (en) * | 2005-02-11 | 2006-08-17 | Macdonald Dettwiler & Associates Inc. | 3d imaging system |
| FI117570B (fi) * | 2005-06-29 | 2006-11-30 | Sandvik Tamrock Oy | Menetelmä kallionporauslaitteen paikoittamiseksi porauspaikkaan ja kallionporauslaite |
| SE530874C2 (sv) | 2007-02-14 | 2008-09-30 | Atlas Copco Rock Drills Ab | Anordning och metod för positionsbestämning av en gruv- eller anläggningsmaskin |
| FI123638B (fi) * | 2007-04-20 | 2013-08-30 | Sandvik Mining & Constr Oy | Menetelmä porauskaavion suuntaamiseksi kaarevissa tunneleissa, kallionporauslaite sekä ohjelmistotuote |
| FI20075661A7 (fi) * | 2007-09-21 | 2009-03-22 | Sandvik Mining & Construction Oy | Menetelmä ja ohjelmistotuote porauskaavion laatimiseksi kalliotilan louhintaa varten |
| US8351684B2 (en) | 2008-02-13 | 2013-01-08 | Caterpillar Inc. | Terrain map updating system |
| JP2010086031A (ja) * | 2008-09-29 | 2010-04-15 | Kajima Corp | 誘導システム及び誘導方法 |
| FI20095715L (fi) * | 2009-06-24 | 2010-12-25 | Sandvik Mining & Constr Oy | Liikkuvan kaivoskoneen automaattista ohjaamista varten käytettävän mallin opettaminen |
| FI20095712A7 (fi) * | 2009-06-24 | 2010-12-25 | Sandvik Mining & Construction Oy | Ohjaustietojen määrittäminen liikkuvan kaivoskoneen automaattista ohjaamista varten |
| FI122157B (fi) * | 2010-05-10 | 2011-09-15 | Sandvik Mining & Constr Oy | Menetelmä ja laitteisto kaivosajoneuvon turvajärjestelyitä varten |
| FI125085B (fi) | 2010-11-29 | 2015-05-29 | Sandvik Mining & Constr Oy | Menetelmä kallionporauslaitteen porausyksikön ohjaamiseksi ja kallionporauslaite |
| US9129211B2 (en) * | 2012-03-15 | 2015-09-08 | GM Global Technology Operations LLC | Bayesian network to track objects using scan points using multiple LiDAR sensors |
| WO2013170348A1 (en) | 2012-05-15 | 2013-11-21 | Tesman Inc. | Mapping of mining excavations |
| CN102798412B (zh) | 2012-07-31 | 2014-12-10 | 同济大学 | 一种基于三维激光扫描评定隧道钻爆施工质量的方法 |
-
2014
- 2014-01-14 WO PCT/EP2014/050598 patent/WO2015106799A1/en not_active Ceased
-
2015
- 2015-01-14 EA EA201691137A patent/EA034130B1/ru not_active IP Right Cessation
- 2015-01-14 US US15/111,297 patent/US10174614B2/en active Active
- 2015-01-14 KR KR1020167022173A patent/KR101917937B1/ko active Active
- 2015-01-14 CN CN201580004593.1A patent/CN105917067B/zh active Active
- 2015-01-14 WO PCT/EP2015/050566 patent/WO2015107069A1/en not_active Ceased
- 2015-01-14 CA CA2936683A patent/CA2936683C/en active Active
- 2015-01-14 CA CA2936491A patent/CA2936491C/en not_active Expired - Fee Related
- 2015-01-14 BR BR112016016301-0A patent/BR112016016301B1/pt active IP Right Grant
- 2015-01-14 US US15/111,301 patent/US20160341041A1/en not_active Abandoned
- 2015-01-14 PE PE2016001115A patent/PE20160975A1/es not_active Application Discontinuation
- 2015-01-14 WO PCT/EP2015/050565 patent/WO2015107068A1/en not_active Ceased
- 2015-01-14 EP EP15700254.4A patent/EP3094805A1/en not_active Withdrawn
- 2015-01-14 WO PCT/EP2015/050567 patent/WO2015107070A1/en not_active Ceased
- 2015-01-14 AU AU2015206035A patent/AU2015206035B2/en active Active
- 2015-01-14 JP JP2016563261A patent/JP6273041B2/ja active Active
- 2015-01-14 AU AU2015206033A patent/AU2015206033B2/en active Active
- 2015-01-14 US US15/111,290 patent/US10260343B2/en active Active
- 2015-01-14 CA CA2936686A patent/CA2936686C/en active Active
- 2015-01-14 AU AU2015206034A patent/AU2015206034A1/en not_active Abandoned
-
2016
- 2016-07-08 CL CL2016001754A patent/CL2016001754A1/es unknown
- 2016-07-12 CL CL2016001780A patent/CL2016001780A1/es unknown
- 2016-07-12 CL CL2016001781A patent/CL2016001781A1/es unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1996022547A2 (en) * | 1995-01-20 | 1996-07-25 | Tamrock Oy | A method for determining the position of a tool of a rock drill |
| EP1176393A2 (en) * | 2000-07-17 | 2002-01-30 | Inco Limited | Self-contained mapping and positioning system utilizing point cloud data |
| WO2007000488A1 (en) * | 2005-06-27 | 2007-01-04 | Sandvik Mining And Construction Oy | Arrangement for positioning drilling unit |
| JP2008025163A (ja) * | 2006-07-20 | 2008-02-07 | Enzan Kobo:Kk | 削岩機搭載台車における穿孔位置決め制御方法及び建設機械におけるブーム位置決め制御方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018155590A1 (ja) * | 2017-02-24 | 2018-08-30 | 国立研究開発法人理化学研究所 | 写真画像に映ったトンネル内の壁面の位置を同定する同定装置、同定方法、ならびに、プログラム |
| JPWO2018155590A1 (ja) * | 2017-02-24 | 2019-12-12 | 国立研究開発法人理化学研究所 | 写真画像に映ったトンネル内の壁面の位置を同定する同定装置、同定方法、ならびに、プログラム |
| JP7045721B2 (ja) | 2017-02-24 | 2022-04-01 | 国立研究開発法人理化学研究所 | 写真画像に映ったトンネル内の壁面の位置を同定する同定装置、同定方法、ならびに、プログラム |
| JP2019169018A (ja) * | 2018-03-26 | 2019-10-03 | 前田建設工業株式会社 | 建設現場における資機材搬送システム |
| KR102225146B1 (ko) * | 2019-12-13 | 2021-03-10 | 주식회사 이에스피 | 광산 안전관리를 위한 갱내 차량 v2x 시스템 및 광산 안전 관리 방법 |
| KR102246499B1 (ko) * | 2019-12-13 | 2021-05-04 | 주식회사 이에스피 | 광산 안전 통합관리 시스템 및 방법 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6273041B2 (ja) | 採掘坑車両及び採掘坑作業タスクの開始方法 | |
| EP3094806B1 (en) | Mine vehicle and method of initiating mine work task | |
| US12146407B2 (en) | Mine vehicle boom positioning control | |
| EP3094807B1 (en) | Mine control system | |
| EP3303772B1 (en) | Adaptation of mining operations satellite coverage | |
| US11532162B2 (en) | Information presenting device and information presenting method | |
| EP3660266B1 (en) | Model generation for route planning or positioning of mobile object in underground worksite | |
| CN117940650A (zh) | 用于控制采矿钻机的方法和控制节点 | |
| EP4459098A1 (en) | Meshing plan update based on actual surface model of a rock surface | |
| EP4459099A1 (en) | Controlling mesh installation based on a mesh deformation parameter | |
| CN120380240A (zh) | 控制网片安装 | |
| CN120380239A (zh) | 控制网片安装 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161020 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170609 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170620 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170915 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6273041 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |