JP2017506525A - 歯垢検出ストリームプローブの阻害を低減する方法 - Google Patents
歯垢検出ストリームプローブの阻害を低減する方法 Download PDFInfo
- Publication number
- JP2017506525A JP2017506525A JP2016538109A JP2016538109A JP2017506525A JP 2017506525 A JP2017506525 A JP 2017506525A JP 2016538109 A JP2016538109 A JP 2016538109A JP 2016538109 A JP2016538109 A JP 2016538109A JP 2017506525 A JP2017506525 A JP 2017506525A
- Authority
- JP
- Japan
- Prior art keywords
- fluid
- distal
- sensor
- probe
- passage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4538—Evaluating a particular part of the muscoloskeletal system or a particular medical condition
- A61B5/4542—Evaluating the mouth, e.g. the jaw
- A61B5/4547—Evaluating teeth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C1/00—Dental machines for boring or cutting ; General features of dental machines or apparatus, e.g. hand-piece design
- A61C1/0007—Control devices or systems
- A61C1/0015—Electrical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C17/00—Devices for cleaning, polishing, rinsing or drying teeth, teeth cavities or prostheses; Saliva removers; Dental appliances for receiving spittle
- A61C17/02—Rinsing or air-blowing devices, e.g. using fluid jets or comprising liquid medication
- A61C17/0202—Hand-pieces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C17/00—Devices for cleaning, polishing, rinsing or drying teeth, teeth cavities or prostheses; Saliva removers; Dental appliances for receiving spittle
- A61C17/16—Power-driven cleaning or polishing devices
- A61C17/20—Power-driven cleaning or polishing devices using ultrasonic waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C17/00—Devices for cleaning, polishing, rinsing or drying teeth, teeth cavities or prostheses; Saliva removers; Dental appliances for receiving spittle
- A61C17/16—Power-driven cleaning or polishing devices
- A61C17/22—Power-driven cleaning or polishing devices with brushes, cushions, cups, or the like
- A61C17/221—Control arrangements therefor
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Veterinary Medicine (AREA)
- Dentistry (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Epidemiology (AREA)
- Engineering & Computer Science (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Biomedical Technology (AREA)
- Surgery (AREA)
- Rheumatology (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Physical Education & Sports Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Water Supply & Treatment (AREA)
- Dental Tools And Instruments Or Auxiliary Dental Instruments (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
- Measuring Fluid Pressure (AREA)
Abstract
表面上の物質の存在を検出するための検出装置の近位ボディ部210が、互いに流体連結する、ポンプ部124,142と、近位プローブ部111,120と、を含む。コントローラ225は、パラメータセンサP(P1又はP2)によって感知された信号読み取り値を処理するとともに、当該信号読み取り値が、検出装置100,100´,100´´,100´´a,100´´b,100´´c,100´´d,100´´eの遠位プローブ部110の遠位先端112,112´の開口を介する流体の通過を妨害する物質116を示すかどうかを決定する。当該コントローラ225は、信号読み取り値が、遠位先端112,112´の開口を介する流体130の通過を妨害する物質116を示すと決定した場合、遠位先端112,112´における動圧を変化させる信号を送信する。
Description
本開示は、歯面の状態を検出するために用いられる装置に関する。より具体的には、本開示は、歯面の状態を検出するために利用されるストリームプローブに関する。
虫歯又は歯周病は、歯垢内に存在する細菌によって引き起こされる感染症であると考えられている。歯垢の除去は口腔衛生にとって非常に重要である。しかし、歯垢を肉眼で特定することは容易ではない。歯垢及び/又は虫歯の検出を援助するために、様々な歯垢検出装置が製造されてきた。
歯垢検出装置のほとんどは、訓練された専門家用に構成され、歯垢(及び/又は齲蝕)と虫歯でない領域からの可視発光スペクトルが大きく異なることを利用する。一部の歯垢検出装置は、消費者が良好な口腔衛生を達成するのを援助するために、(通常、ほとんどが訓練された歯科専門家ではない)消費者による家庭での使用のために構成される。
例えば、歯垢装置の1つの既知の種類は、照射光を用いて歯材料及び歯肉を照射し、バイオフィルムに感染している領域及び歯垢領域を特定する。この種の歯垢検出装置は、単色励起光を用いて440−470nm(例えば青色光)及び560−640nm(例えば赤色光)の2つの帯域の蛍光を検出するよう構成することができ、強度を差し引くことにより歯垢及び/又は虫歯領域が明らかになる。
上述の歯垢装置はそれらの使用目的には適しているが、1つ以上の短所を呈する。特に、目の各領域は異なる光の波長を吸収することが知られており、目が余りに多くの光を吸収する場合、目が傷つくおそれがある。理解され得るように、起こり得る目の負傷を防ぐためには、歯垢検出装置が適切に口内に配置されるまで、ユーザが歯垢検出装置を起動しないことが必要である。しかし、上記装置は、歯垢検出装置が口内に配置されたときを自動的に検出するよう構成されていない。結果として、適切な取扱い上の注意が守られない場合、例えば消費者による誤用の場合、目にさらされるとき、目を傷つけ又は不快なぎらつきを生じる潜在的に有害な放射がもたらされるおそれがある。更に、この技術は特に古い歯垢を検出するのに適しており、歯の蛍光と若い(1日後)歯垢の蛍光とは区別されない。
本発明の目的は、表面(例えば歯面(dental surface))上の物質(例えば歯垢)の改良された検出を提供することである。
従って、本開示の一態様は、表面上の物質の存在を検出するための装置を含む。装置は、近位ポンプ(例えばシリンジ)部を含む近位ボディ部、及び、第1の流体に浸漬されるよう構成された少なくとも1つの遠位プローブ部を含む。近位ポンプ部及び遠位プローブ部は、互いに流体連結する。遠位プローブ部は、第2の流体(例えば気体又は液体)の通過を可能にする開口を有する遠位先端を定める。装置は、遠位先端を介する第2の流体の通過が、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質と相関する信号の測定に基づく、表面上に存在し得る物質の検出を可能にするよう構成される。
或る態様では、信号は圧力信号でもよく、検出装置は、圧力信号を検出するよう構成、及び、配置された圧力センサを更に含む。近位ポンプ部が、圧力センサを含んでもよい。
或る態様では、装置は、近位ポンプ部と遠位プローブ部との間に配置された圧力センシング部を更に含んでもよく、圧力センサは、圧力信号を検出するよう圧力センシング部と流体連結するよう配置される。近位ポンプ部、圧力センシング部、及び、遠位プローブ部は、合わせて検出装置の総体積となる内部体積をそれぞれ定め、検出装置は、アコースティックローパスフィルタを形成し得る。
他の態様では、近位ポンプ部は、可動プランジャーを含んでもよく、可動プランジャーは、近位ポンプ部の近位端から近位ポンプ部の遠位端に向かって往復移動できるよう構成及び配置されてもよい。これにより、プランジャーの移動は、遠位プローブ部内に体積又は質量フローを引き起こし、あるいは、近位ポンプ部が可動ダイアフラムを含む場合、これによりダイアフラムの移動が、遠位プローブ部内に体積又は質量フロー変化を引き起こす。
装置は、更にコントローラを含んでもよい。コントローラは、圧力センサが感知した圧力値を処理し、圧力値が遠位先端の開口を介する流体の通過を妨害する物質を示すか否かを決定し得る。物質は歯垢でもよい。
装置の他の態様では、信号は、プローブ部の歪みを表す。検出装置は、更に、プローブ部の歪みを表す信号を検出及び測定できるよう構成され、且つ、遠位プローブ部上に配置された歪みゲージを含み得る。
或る態様では、開口を有する遠位先端は、遠位先端が表面に触れるとき、第2の流体が遠位先端を通過することが可能であるようになるような角度で面取りされてもよい。開口の面の角度は、遠位先端が表面に触れ、物質が遠位先端の開口を介する流体の通過を少なくとも部分的に妨害するとき、遠位先端を介する第2の流体の通過が少なくとも部分的に妨害されるようなものでもよい。
本開示の他の態様は、互いに流体連結するポンプ部及び近位プローブ部、並びに、コネクタを含む近位ボディ部を含み、近位プローブ部と遠位プローブ部との間の流体連結を確立するために、近位プローブ部は、コネクタを介して検出装置の遠位プローブ部に接続され得る。検出装置は、第1の流体内に浸漬されるよう構成された遠位プローブ部を含む。遠位プローブ部は、第2の流体の通過を可能にする開口を有する遠位先端を定める。装置は、遠位先端を介する第2の流体の通過が、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質と相関する信号の測定に基づく、表面上に存在し得る物質の検出を可能にするよう構成される。
本開示の他の態様は、表面上の物質の存在を検出するためのシステムを含む。システムは、上記の第1の検出装置と、上記の第1の検出装置と同様に構成された少なくとも第2の検出装置とを含む。
本開示の他の態様は、表面上の物質の存在を検出する方法を含み、方法は、近位端及び流体媒体の通過を可能にする開口を有する遠位プローブ先端を含む内部チャネルを定めるストリームプローブ管状部材又はストリームプローブにより、プローブ先端を表面の近くに且つストリームプローブ管状部材が第1の流体媒体内に浸漬されるよう配置するステップと、第2の流体媒体を内部チャネル及び遠位プローブ先端を通過させるステップと、第1の流体媒体内に生じる相互作用ゾーンにおいて、遠位プローブ先端を表面に触れさせるステップと、内部チャネル若しくは遠位プローブ先端又はこれらの結合を介する第2の流体媒体のフローの少なくとも部分的な妨害の検出により、相互作用ゾーンの特性を調べるステップとを含む。
本開示の他の態様は、表面上の物質の存在を検出する方法を含み、方法は、それぞれが近位端及び流体媒体の通過を可能にする開口を有する遠位プローブ先端を含む内部チャネルを定める少なくとも2つのストリームプローブ管状部材又はストリームプローブにより、2つのプローブ先端を表面の近くに且つ2つのストリームプローブ管状部材又はストリームプローブが第1の流体媒体内に浸漬されるよう配置するステップと、第2の流体媒体を内部チャネル及び遠位プローブ先端を通過させるステップと、第1の流体媒体内に生じる相互作用ゾーンにおいて、遠位プローブ先端を表面に触れさせるステップと、内部チャネル若しくは遠位プローブ先端又はこれらの結合を介する第2の流体媒体のフローの少なくとも部分的な妨害の検出により相互作用ゾーンの特性を調べるステップとを含む。
或る態様では、内部チャネル及び遠位プローブ先端を介する第2の流体媒体のフローの少なくとも部分的な妨害の検出は、2つのストリームプローブ管状部材のうちの一方及び2つのストリームプローブ管状部材のうちの他方で検出された圧力信号間の差の検出を含み得る。
他の態様では、内部チャネル及び遠位プローブ先端を介する第2の流体のフローの少なくとも部分的な妨害の検出は、2つのストリームプローブ管状部材のうちの一方及び2つのストリームプローブ管状部材のうちの他方で検出された歪み信号間の差の検出を含み得る。
他の態様では、遠位先端は、遠位先端が表面に触れ、第2の流体媒体が面取りされた開口を通過することが可能になるとき、第2の流体媒体を内部チャネル及び遠位プローブ先端を通過させるステップが可能になるような角度で面取りされ得る開口を有する。
他の態様では、内部チャネル及び遠位プローブ先端のうちの少なくとも1つを介する第2の流体媒体のフローの少なくとも部分的な妨害を検出するステップは、開口の面の角度が、遠位先端が表面に触れ、物質が遠位先端の開口を介する第2の流体媒体の通過を少なくとも部分的に妨害するとき、遠位先端を介する第2の流体の通過が少なくとも部分的に妨害されるような角度であることにより可能にされる。
或る態様では、相互作用ゾーンの特性の調査は、相互作用ゾーン内の表面に由来する歯垢の特性の測定を含み得る。
他の態様では、第2の流体媒体を内部チャネル及び遠位プローブ先端を通過させるステップは、第2の流体媒体を少なくとも2つのストリームプローブ管状部材の近位端から遠位プローブ先端を介して遠位に流させること、又は、第2の流体媒体を遠位プローブ先端から内部チャネルを介してストリームプローブ管状部材の近位端に向けて近位に流させることによって実行され得る。
本開示は、プローブ先端を介する流体媒体の流出特性を記録することにより歯面を調査する方法について述べる。プローブ先端から流出する流体の特性は、例えば、時間の関数として流体媒体の圧力を記録することによって測定され得る。先端−表面領域からの気泡を含む流体の放出特性は、プローブ先端に存在する歯面又は歯科物質(dental material)の粘弾性特性を特徴付け得る。気泡を含む流体は、歯ブラシの歯垢除去率も高め得る。
本開示の例示的な実施形態の新規の特徴は以下の通りである。
(a)プローブ先端において流体媒体が表面と接触させられ、先端と表面との間に相互作用ゾーンを生成する。
(b)相互作用ゾーン内の媒体の形状及び/又は動態は、表面及び/又は表面に由来する物質の特性に依存する。
(c)相互作用ゾーン内の媒体の圧力、形状、及び/又は動態が検出される。
(a)プローブ先端において流体媒体が表面と接触させられ、先端と表面との間に相互作用ゾーンを生成する。
(b)相互作用ゾーン内の媒体の形状及び/又は動態は、表面及び/又は表面に由来する物質の特性に依存する。
(c)相互作用ゾーン内の媒体の圧力、形状、及び/又は動態が検出される。
コントローラにより、特定の歯の歯面において、歯垢の所定の最大容認可能又は許容可能レベルを上回る歯垢レベルが検出されたか否かが決定される。
陰性の決定がなされた場合、ブラシを隣の歯又は他の歯に進めるよう、組み込みストリームプローブ歯垢検出システムを有する電気歯ブラシのユーザに信号が送られる。
あるいは、陽性の検出がなされた場合、その特定の歯のブラッシングを続けるよう、組み込みストリームプローブ歯垢検出システムを有する電気歯ブラシのユーザに信号が送られる。
したがって、本開示の実施形態は、遠位先端の開口を介する流体の通過が、開口を介する流体の通過を少なくとも部分的に妨害する物質と相関する信号の測定に基づく、表面、例えば歯面上に存在し得る物質の検出を可能にするよう構成された装置に関する。装置は近位ポンプ部と、他の流体内に浸漬されるよう構成された少なくとも1つの遠位プローブ部とを含む。装置は、少なくとも2つの装置を含む対応するシステム内に含まれてもよい。方法は、フローの少なくとも部分的な妨害のための相互作用ゾーンの調査を含む。
例示的な一実施形態では、例えば遠位プローブ部内の圧力が周囲圧力以下のとき、第1の流体も遠位プローブ部の遠位先端の開口を通過し得る。
更に他の例示的な実施形態では、表面上の物質の存在を検出するための検出装置の近位ボディ部が、ポンプ部と、遠位プローブ部とを含む。ポンプ部及び近位プローブ部は、互いに流体連結する。近位プローブ部と遠位プローブ部との間に流体連結を確立するために、近位プローブ部は、コネクタを介して、検出装置の遠位プローブ部に接続されてもよい。検出装置は、第1の流体に浸漬されるよう構成された遠位プローブ部を含む。遠位プローブ部は、第2の流体の通過を可能にする開口を有する遠位先端を定める。検出装置は、遠位先端を介する第2の流体の通過を生じさせ、これにより、遠位プローブ部におけるセンサパラメータにおける変化を誘起するポンプ部が、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質と相関するセンサパラメータを表す信号の測定に基づく、表面上に存在し得る物質の検出を可能にするように構成される。また、近位ボディ部は、センサパラメータを表す信号を検出するように構成及び配置されるパラメータセンサと、コントローラとを含む。コントローラは、パラメータセンサによって感知された信号読み取り値を処理し、信号読み取り値が、遠位先端の開口部を介する流体の通過を妨害する物質を示すかどうかを決定する。コントローラは、ポンプ部及びパラメータセンサと電気的に通信可能である。コントローラは、信号読み取り値が遠位先端の開口部を介する流体の通過を妨害する物質を示すと決定した場合に、遠位先端における動圧を変える信号を送信する。或る例示的な実施形態では、表面上の物質の存在を検出するための検出装置の使用中、コントローラが、信号読み取り値が遠位先端の開口部を介する流体の通過を妨害する物質を示すと決定した場合、動圧における変化を生じさせる近位ボディ部の動作において変化を生じさせ、遠位先端の開口部を介する流体の通過を妨害する物質を除去する信号を生成する。
更に他の例示的な実施形態では、コントローラが、パラメータセンサによって感知された信号読み取り値を処理するともに、信号読み取り値が遠位先端の開口部を介する流体の通過を妨害する物質を示すと決定した場合、コントローラは、吐き出し圧力又は流れ圧力又はその両方を変化させ、遠位先端の開口部を介する流体の通過を妨害する物質を除去すべく、遠位先端への流れを変化させるために、ポンプ部に信号を送信する。
或る例示的な実施形態では、近位ボディ部は、近位プローブ部と流体連結するように配置されたパラメータセンサと、パラメータセンサ周囲にフローのバイパス形成するように近位プローブ部と流体連結する流体導管部材と、流体導管部材に配置された流体フロー妨害装置と、を更に含む。流体フロー妨害装置は、ポンプ部の動作中、閉位置にある。コントローラが、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質と相関するセンサパラメータを表す信号を受信した場合、コントローラは、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質を除去すべく、遠位先端における動圧を変化させ、パラメータセンサをバイパスするよう、少なくとも部分的に開くための信号を流体フロー妨害装置に送信する。
更に他の実施形態では、近位ボディ部は、ポンプ部と近位プローブ部との間を流体連結するように配置された中央パラメータセンサ部を更に含んでいてもよい。中央パラメータセンサ部は、ポンプ部と近位プローブ部との間の流体連結を可能にする。パラメータセンサは、中央パラメータセンサ部と流体連結するように配置される。流体導管部材は、パラメータセンサ周囲にフローのバイパスを形成するように、近位プローブ部と中央パラメータセンサ部とを流体連結する。流体フロー妨害装置が、流体導管部材内に配置されてもよく、ポンプ部の動作中は閉位置にあってもよい。コントローラが、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質と相関するセンサパラメータを表す信号を受信した場合、コントローラは、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質を除去すべく、遠位先端における動圧を変化させ、パラメータセンサをバイパスするよう、少なくとも部分的に開くための信号を流体フロー妨害装置に送信する。
他の例示的な実施形態では、流体導管部材は、流体フロー妨害装置の上流に配置されるとともに、中央パラメータセンサ部と流体連結した流体容器を更に含んでいてもよい。ここで、流体容器は、流体フロー妨害装置が閉位置にある場合、パラメータセンサの下流にある中央パラメータセンサ部内の圧力より大きい圧力で加圧されている。
更に他の例示的な実施形態では、コントローラが、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質と相関するセンサパラメータを表す信号を受信した場合、コントローラは、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質を除去すべく、パラメータセンサをバイパスするよう、流体容器から圧力を解放し、これにより、遠位先端における動圧を増加させるため、少なくとも部分的に開くための信号を流体フロー妨害装置に送信する。
他の例示的な実施形態では、第2の流体フロー妨害装置が、パラメータセンサの上流にある中央パラメータセンサ部の一部と、パラメータセンサの下流にある中央パラメータセンサ部の一部との間に流体連結が供給されるように、流体容器の上流に配置される。ここで、第2の流体フロー妨害装置、流体容器、及び、流体フロー妨害装置は、パラメータセンサ周囲にフローのバイパスを形成する。
更に他の実施形態では、検出装置の使用中、コントローラが、少なくとも部分的に開くための信号を流体フロー妨害装置に送信した後、流体容器内の圧力が低下した場合、コントローラは、パラメータセンサ周囲のフローをバイパスさせるため、閉位置から少なくとも部分的に開いた位置に移行させるべく、第2の流体フロー妨害装置に信号を送信し、これにより、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質を除去すべく、遠位先端における動圧を増加させる。
或る例示的な実施形態では、近位ボディ部は、ポンプ部と近位プローブ部との間を流体連結するように配置された中央パラメータセンサ部を更に含んでいてもよい。中央パラメータセンサ部は、ポンプ部と近位プローブ部との間の流体連結を可能にする。パラメータセンサが、中央パラメータセンサ部と流体連結して配置される。スタンバイポンプ部が、パラメータセンサの下流にある中央パラメータセンサ部における接続を通じて中央パラメータセンサ部と流体連結するポンプ排出流体導管部材を持つ。コントローラが、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質と相関するセンサパラメータを表す信号を受信した場合、コントローラは、遠位先端の開口を介する流体の通過を少なくとも部分的に妨害する物質を除去すべく、動作を初期化するための信号をスタンバイポンプ部に送信し、これにより、遠位先端における動圧を増加させる。
或る例示的な実施形態では、表面上の物質の存在を検出するための検出装置の非使用中は、コントローラが、動圧を変化させる近位ボディ部の動作における変化を生じさせる信号を生成し、遠位先端の開口を介する流体の通過を妨害する物質を除去する。近位ボディ部の動作における変化は、遠位先端の将来的な妨害の発生の可能性を最小化するのに必要な期間、又は、遠位先端の開口を介する流体の通過を妨害する物質を除去するのに必要な期間、遠位プローブ部を介した流体をポンピングするポンプ部によって達成され得る。
更に他の例示的な実施形態では、遠位先端の将来的な妨害の発生の可能性を最小化するのに必要な期間は、表面上の物質の存在を検出するための検出装置の使用前の期間、又は、表面上の物質の存在を検出するための検出装置の使用後の期間である。
他の例示的な実施形態では、遠位先端の開口を介する流体の通過を妨害する物質を除去するのに必要な期間は、表面上の物質の存在を検出するための検出装置の使用前の期間、又は、表面上の物質の存在を検出するための検出装置の使用後の期間である。
更に他の例示的な実施形態では、近位ボディ部は、検出装置の遠位口腔挿入部に配置された突起部を振動させるための振動シャフトを更に含む。振動突起部は、対象又は検出装置のユーザの歯科衛生をもたらす。近位ボディ部は、振動シャフトを動作させるための突起部振動モータと、振動シャフトを動作させるための突起部振動モータを活性化するための活性化装置と、を更に含んでいてもよい。活性化装置は、コントローラと電気的に通信する。コントローラは、活性化装置の活性化前に遠位先端を介する第2の流体の通過を生じさせるため、ポンプ部に信号を送信する。動圧における変化は、活性化装置の活性化前の動圧と比較される。代替的に、又は、追加的に、コントローラは、活性化装置の活性化後に遠位先端を介する第2の流体の通過を生じさせるため、ポンプ部に信号を送信する。ここで、コントローラは、活性化装置の再活性化後に遠位先端を介する第2の流体の通過を生じさせ続けるため、ポンプ部に信号を送信する。動圧における変化は、活性化装置の活性化後の動圧と比較される。
或る例示的な実施形態では、近位ボディ部は、コントローラと電気的に通信する検出装置使用センサを更に含んでいてもよく、活性化装置の活性化前の時間が、検出装置使用センサの活性化によって初期化されるため、コントローラによって感知される。
他の例示的な実施形態では、検出装置使用センサは、動きセンサ、又は、接触センサ、又は、それらの組み合わせである。接触センサは、圧力センサ、又は、温度センサ、又は、それらの組み合わせを含む。
或る実施形態では、検出装置の使用を示す検出装置使用センサからの信号の受信後の所定の期間において活性化装置の活性化がなく、コントローラが、検出装置使用センサの活性化を感知した場合、コントローラは、遠位先端を介する第2の流体の通過の発生を停止するようポンプ部に通知する。
更に他の例示的な実施形態では、ポンプ部は、ポンプ部を介する第2の流体の吸入を可能にするとともに、ポンプ部を介する第3の流体の吸入をを可能にする吸入口を含んでいてもよい。ここで、動圧における変化は、遠位先端の開口を介する流体の通過を妨害する物質を除去するため、ポンプ部が遠位先端に第3の流体の通過を生じさせることを含む。第3の流体は、液体であってもよい。
他の例示的な実施形態では、第3の流体は、液滴であってもよく、ポンプ部は、吸入口を介して、遠位先端への第2の流体及び液滴の通過を生じさせる第2の流体と液滴とを共に吸入する。
ポンプ部は、遠位先端への液滴の通過が、遠位先端における動圧を変化させ、遠位先端の開口部を介する第2の流体の通過を妨害する物質の除去を生じさせるように、液滴に対して十分な運動エネルギーを供給し得る。
近位ボディ部の他の例示的な実施形態では、コントローラは、ポンプ部の少なくとも1つの交互の動作サイクルが、遠位先端において負圧状態及び陽圧状態を生じさせ、これにより、遠位先端を介する流体フローを振動させるように、ポンプ部の動作を制御してもよい。負圧状態から陽圧状態への、又は、陽圧状態から負圧状態への、交互の動作サイクルは、遠位先端における動圧を変化させる。
本開示の上記及び他の側面は、後述される実施形態を参照して説明され、明らかになるであろう。
本開示の側面は、下記の図面を参照してより良く理解され得る。図中の構成要素は必ずしも縮尺通りではなく、開示の原理を明確に説明することに重点が置かれる。更に、図面において、同様の参照符号は異なる図面を通して対応する部品又は部分を示す。
図1は、本開示に係る歯面に作用するストリームプローブの一般的な原理を示す。
図2は、本開示の例示的な一実施形態に係る、歯面に作用するストリームプローブに関する、親水性がより低い表面及び親水性がより高い表面上の表面張力の影響を示す。
図3は、本開示の例示的な一実施形態に係る水中の針からの気泡の左右の図を示し、左では歯垢表面に触れ、右ではエナメル質表面に触れている。
図4Aは、管内圧の測定中にプローブ先端に管を介して連続的な気体流を供給するポンプ部を有するストリームプローブの本開示の例示的な一実施形態を示す。
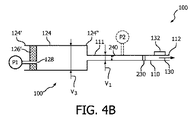
図4Bは、ポンプ内圧の測定中にプローブ先端に管を介して連続的な気体流を供給するポンプ部の例示的な一実施形態を有する図4Aのストリームプローブの他の例示的な実施形態を示す。
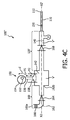
図4Cは、ポンプ内圧の測定中にプローブ先端に管を介して略連続的な気体流を供給するポンプ部の他の例示的な実施形態を有する図4A及び図4Bのストリームプローブの他の例示的な実施形態を示す。
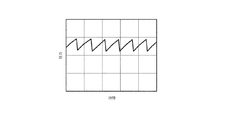
図5は、時間の関数として図4Aのストリームプローブのサンプル圧力測定を示す。
図6は、様々な歯面までの図4Aのプローブ先端の距離の関数としてサンプル圧力信号振幅を示す。
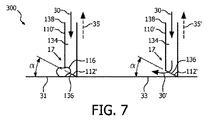
図7は、本開示の例示的な一実施形態に係る表面上の物質の存在を検出するためのシステムを示し、左は、歯垢等の歯面物質による部分的な妨害を有するストリームプローブの一実施形態を示し、一方、右は、妨害されていないストリームプローブの一実施形態を示す。
図8は、左に、図7の妨害されていないストリームプローブのサンプル圧力測定対時間を示し、右に、図7の部分的に妨害されているストリームプローブのサンプル圧力測定対時間を示す。
図9は、本開示の例示的な一実施形態に係るテフロン(登録商標)先端を有するストリームプローブの圧力信号対時間を示す。
図10は、本開示の例示的な一実施形態に係る電気歯ブラシ等の歯科用装置に組み込まれたストリームプローブシステムを示す。
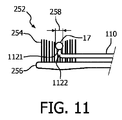
図11は、ブラシの毛の中に配置されたストリームプローブ先端を有する図10の線211−211沿いに取られた歯科用装置のブラシの図を示す。
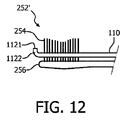
図12は、ストリームプローブ先端がブラシの毛から遠位に延びる、図11のブラシの図の他の例示的な実施形態を示す。
図13は、第1のストリームプローブ先端への入り口における管内圧及び第2のストリームプローブ先端への入り口における内圧を測定する間、2つのプローブ先端に管を介して連続的な気体流を供給するポンプ部を有する図4Aのストリームプローブの他の例示的な実施形態を示す。
図14は、図13に係るストリームプローブの実施形態に係るようなブラシの基部を含むブラシ上に複数のストリームプローブを含む図10のブラシの他の例示的な実施形態を示す。
図15は、図14のブラシの他の図を示す。
図16は、図14のブラシの他の図を示す。
図17は、ブラシの基部を含むブラシ上に複数のストリームプローブを含む図10のブラシの他の例示的な実施形態を示す。
図18は、図17のブラシの他の図を示す。
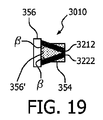
図19は、図17のブラシの他の図を示す。
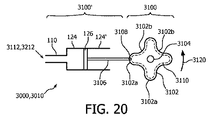
図20は、ストリームプローブ作動装置が第1のストリームプローブを含む、表面上の物質の存在を検出するためのシステム本開示の例示的な一実施形態を示す。
図21は、他のストリームプローブ作動装置が第2のストリームプローブを含む図20のシステムを示す。
図22は、モーターが図20及び図21のストリームプローブ作動装置を作動する共通のシャフトに動作可能に接続された図20及び図21のシステムを示す。
図23は、図4A、図4B、図4C、及び、図10に図示されるような、開口136を有するテフロンチューブである遠位プローブ部の遠位先端の実際の写真表示を示す。
図24は、比較的大きい青い粒子を含む歯磨き粉により幾らか実験された後に妨害された図23の開口を示す。
図25は、パラメータセンサ周囲にフローバイパスを形成する流体導管部材を持つ近位ボディ部を含む本開示に係る表面上の物質の存在を検出するための検出装置の例示的な実施形態を示す。
図26は、パラメータセンサ周囲にフローバイパスを形成する流体導管部材を持つ近位ボディ部を含む本開示に係る表面上の物質の存在を検出するための検出装置の他の例示的な実施形態を示す。
図27は、パラメータセンサをバイパスする流体容器を持つ近位ボディ部を含む、表面上の物質の存在を検出するためのストリームプローブ又は検出装置の他の例示的な実施形態を示す。
図28は、パラメータセンサをバイパスする第1のポンプ部及び第2又はスタンバイポンプ部を含む近位ボディ部を含む、表面上の物質の存在を検出するためのストリームプローブ又は検出装置の他の例示的な実施形態を示す。
図29は、ポンプ部を介する流体の吸入を可能にするとともに、ポンプ部を介する他の流体の吸入を可能にする吸入口を持つ近位ボディ部を含む、表面上の物質の存在を検出するためのストリームプローブ又は検出装置の更に他の例示的な実施形態を示す。
図30は、遠位口腔挿入部が、近位ボディ部から取り外され、検出装置殺菌ユニットに配置される、表面上の物質の存在を検出するためのストリームプローブ又は検出装置の更に他の例示的な実施形態を示す。
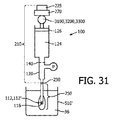
図31は、遠位口腔挿入部が液体容器に浸漬される、遠位先端の開口を介する流体の通過を妨害する物質116を除去するための他の方法の或る例示的な実施形態を示す。
図32は、遠位先端挿入部がユーザの口の中に挿入されるとともに、ユーザの口の中の液体に浸漬される、図31のストリームプローブのユーザを示す。
本開示は、特に、ユーザが実際に歯から歯垢を除去しているのか及び歯垢を完全に除去し終えたかをユーザに知らせ、安心、及び良い習慣への指導の両方を提供することによって、ユーザが歯を清掃するのを援助することに関するシステム、装置、及び方法の様々な実施形態を説明する。例示的な一実施形態では、さもなければ消費者受容が低い可能性が高いため、情報はブラッシング中にリアルタイムで提供される。例えば、磨いている位置がきれいで、次の歯に移ることができるとき、歯ブラシがユーザに合図を与えれば有用である。これは歯磨きの時間を短くするだけでなく、より優れた、より意識的なブラッシングルーチンをもたらし得る。
本開示の例示的な実施形態の1つの特定の使用目標は、歯磨剤の泡によって包囲された振動歯ブラシシステム、例えばPhilips Sonicare(登録商標)歯ブラシ内で歯垢を検出できるようにすることである。検出システムは、より厚い、除去可能な歯垢層を有する表面と、よりきれいなペリクル/歯石/薄い歯垢/歯面との間のコントラストを提供すべきである。
本明細書で定められるように、「に結合される」との用語は、「に結合されるよう構成される」とも解釈され得る。「送信するために」との用語は、「の送信を可能にするために」とも解釈され得る。「受信するために」との用語は、「の受信を可能にするために」とも解釈され得る。
図1は、本開示の例示的な一実施形態に係るストリームプローブ10を使用して、表面上の物質、例えばエナメル質等の表面上の歯垢等の物質の存在を検出する方法を示す。円筒状の管部材として例示的に示されるストリームプローブ10は、近位端16、内部チャネル15、及び遠位プローブ先端12を定める。内部チャネル15は、例えば気体又は液体等の流体媒体14を収容する。プローブ先端12は、表面13、例えば歯面の近傍に配置される。プローブ10は、例えば歯科洗浄液などの水溶液等の流体媒体11内に浸漬される。プローブ流体媒体14はプローブチャネル15中を流れ、相互作用ゾーン17において表面13に触れる。プローブ媒体14のアウトフローを介して、相互作用ゾーン17の特性が調べられる。
図10に関して後により詳細に述べられるように、表面上の物質の存在を検出するための装置又は器具、例えば組み込みストリームプローブ歯垢検出システムを備えた電気歯ブラシを含むデンタルクリーニング器具等は、流体媒体14がプローブ先端12において表面13、例えば歯面と接触し、遠位先端12と表面13との間に相互作用ゾーン17を生成するよう構成される。
図10に関して後により詳細に述べられるように、相互作用ゾーン17内の媒体14の形状及び/又は動態は、表面13の特性及び/又は表面13に由来する物質に依存し、相互作用ゾーン17内の媒体14の圧力、形状、及び/又は動態が検出され、特定の歯面13において歯垢の所定の最大許容可能レベルが検出されるか否かに関して、コントローラが決定を行う。
より具体的には、媒体14が気体30の場合(図2参照)、先端12に気体のメニスカスが現れ、表面13と接触する。先端における気体の形状及び動態は、先端12の特性(例えば、先端材料、表面エネルギー、形状、直径、粗度)、溶液11の特性(例えば材料組成)、媒体14の特性(例えば圧力、流速)、及び表面13の特性(例えば粘弾性特性、表面張力)、並びに/又は表面13に由来する物質(粘弾性特性、表面への付着、テクスチャー等)に依存する。
図2は、表面張力の影響を示す。高い表面エネルギーを有する表面又は強く水和している表面の場合、例えば左の図に示される歯垢の表面等の親水性の表面31の場合、気体30は、相互作用ゾーン17付近の表面31から水系媒体11を容易には置換しない。
低い表面エネルギーを有する表面又はあまり水和していない表面、例えば右の図に示されるエナメル質表面等の親水性がより低い表面33の場合、気体30は表面33から水系媒体11をより容易に置換する。気泡32及び34の特性(形状、圧力、放出レート等)は、歯面31又は33の表面張力に依存する。これは気泡法と呼ばれる。つまり、ストリームプローブ又は遠位プローブ部10は、気体30等の第2の流体の遠位先端12を介する通過が、表面31又は33の近傍において、気体30等の第2の流体によって水系媒体11等の第1の流体内に生成された1つ以上の気泡32又は34と相関する信号の測定に基づく、表面31又は33上に存在し得る物質の検出を可能にするよう構成される。
図3は、例えば水等の水溶液11下のストリームプローブ10からのこのような種類の気泡32及び34の図を示す。左の図中に示されるように、気泡32は濡れた歯垢層31上に付着しないが、右の図中に示されるように、気泡34はエナメル質表面33上に付着し、これは、エナメル質表面33と比較して歯垢層31がより親水性であることを示す。
図4A、図4B、及び図4Cは、本開示の例示的な実施形態に係る表面上の物質の存在を検出するための検出装置又は器具をそれぞれ示し、検出装置は、パラメータセンシング及び測定による歯垢検出の原理を説明するために、パラメータセンサを含むストリームプローブによって例示されている。本明細書で定められるように、パラメータセンサは、ストリームプローブ内の流れの妨害を示し、よって歯垢又はストリームプローブ内の流れを妨げる他の物質を示し得る信号によって表される物理的指標を感知する圧力センサ、歪みセンサ、フローセンサ、又はこれらの組み合わせを含む。周囲温度以上に加熱されたワイヤーから差圧又は熱フローを測定するフローセンサはフローセンサであり、又は圧力、歪み、若しくはフロー、又は化学的若しくは生物学的指標を含む他の指標に関して知られている又は考えられる他の手段は、ストリームプローブ内のフローを妨げる歯垢又は他の物質を示し得るストリームプローブ内のフローの妨害を示す信号によって表される物理的指標を感知するパラメータセンサの定義内に含まれる。単純さのため、説明を目的として、1つ以上のパラメータセンサは1つ以上の圧力センサによって例示される。図中に示されるパラメータセンサの位置は、異なる種類のパラメータに一般的に適用されるよう意図されるが、当業者は、必要であれば、採用される1つ以上のパラメータセンサの具体的な種類に応じて、パラメータセンサの位置が図中に示される1つ以上の位置から調整され得ることを認識するであろう。実施形態はこのコンテキストに限定されない。
より具体的には、図4Aでは、ストリームプローブ100は、図示される管状シリンジ部等の近位ポンプ部124、例示的には図示されるような管状の構成を有する中央パラメータセンシング部120、及び同様に例示的には図示されるような管状の構成を有し、遠位プローブ先端112を定める遠位プローブ部110を含む。遠位管状プローブ部110は、第1の長さL1及び第1の断面積A1を定め、中央パラメータセンシング部120は第2の長さL2及び第2の断面積A2を定め、一方、近位管状シリンジ部124は第3の長さL3及び第3の断面積A3を定める。近位管状シリンジ部124は、例えば図4Aの例示的実施形態では、最初は近位端124'の近傍に配置される往復運動可能なプランジャー126を含む。
プランジャー126が縦方向に長さL3に沿って一定の速度で且つ近位端124'から離れるように移動するとき、プランジャー126により、空気の連続的な流体ストリーム130が中央パラメータセンシング管状部120を介してプローブ先端112に供給される。流体ストリーム130が気体の場合、気体の連続ストリーム130がプランジャー126を介して(例えばプランジャー126内のアパーチャ128を介して(図4Bのプランジャー126'参照))又は中央パラメータセンシング管状部120に接続するブランチ接続122からプローブ先端112に供給される。例示的な一実施形態では、ブランチ接続122の上流の位置において、中央パラメータセンシング管状部120内に制限オリフィス140が配置され得る。
近位管状シリンジ部124の遠位端124"に向かって長さL3に沿ってプランジャー126が移動するのに伴い、ブランチ接続122を介して中央パラメータセンシング部管状部120及び遠位管状プローブ部110と流体連結する圧力計Pを使用して、中央パラメータセンシング部管状部120内の圧力が測定される(制限オリフィス140が存在する場合、制限オリフィス140の下流)。
プランジャー126の移動時、圧力計Pにおける圧力対時間は、プローブ110の先端112における気体メニスカスの表面(図1の表面13、並びに図2及び図3の表面31及び33参照)との相互作用を特徴付ける。制限オリフィス140の下流のストリームプローブ100の体積のみが関係し、ストリームプローブ100が圧力源ではなくフロー源としてより近く又は近似的に振る舞うため、制限オリフィス140の存在は、圧力計Pの応答時間を向上させる。制限オリフィス140の上流の体積は、より無関係になる。
気泡法に関して、差圧は略一定であり、これは、システム内の体積が変化するため、一定のプランジャー速度で気泡サイズが変化し、よって気泡レートが変化することを意味する。略固定の気泡レートを得るために、往復運動可能なプランジャーが使用され得る。上記したように、例示的な一実施形態では、圧力センサPは代替的に又は追加でフローセンサとして、例えば差圧センサとして機能し得る。当業者は、遠位プローブ先端112を介する流体ストリーム又は第2の流体130のフローは、圧力センサP等の圧力センサ以外の手段によって、例えば音響的に又は熱的に検出され得ることを認識するであろう。実施形態はこのコンテキストに限定されない。したがって、プランジャー126の移動は、遠位プローブ先端112を介する圧力、体積又は質量フローの変化を引き起こす。
図5は、図4Aのストリームプローブ100を用いた、時間の関数として(1区画が1秒に対応する)の圧力信号(ニュートン/平方メートル、N/m2で測定)の例を示す。信号の定期的な変化は、プローブ先端112における気泡の定期的な放出に起因する。
構成要素の寸法を注意して選択することにより、圧力読み取りの感度が向上され得る。プローブ110と合わせて、管120及びシリンジ124の両方からの総体積V1(=A1×L1)+体積V2(=A2×L2)+体積V3(=A3×L3)は、アコースティックローパスフィルタを形成する。図4Aの例示的なストリームプローブ100では、断面積A3は断面積A2より大きく、断面積A2は断面積A1よりも大きい。システム内の気体流れ抵抗は、良好なシステム応答時間を有するのに十分小さく設計されるべきである。気泡による差圧が記録される場合、気泡の体積と全システムの体積との間の比は、プローブ先端112における気泡放出に起因する十分な差圧信号が得られるのに十分大きくあるべきである。また、信号の損失をもたらす可能性があるため、管120及びプローブ110の壁と相互作用する圧力波の熱−粘性損失も考慮に入れなければならない。
図4Aに示されるストリームプローブ100では、一例として、3つの体積はそれぞれ異なる。しかし、3つの体積は互いに等しくてもよく、又は、ポンプ体積がプローブ体積より小さくてもよい。
図4Bは、本開示に係るストリームプローブの他の例示的な実施形態を示す。より具体的には、ストリームプローブ100'では、図4Aのストリームプローブ100の中央パラメータセンシング部120が省かれており、ストリームプローブ100'は、近位ポンプ部124及び遠位プローブ部110のみを含む。圧力センサP1は、今度は、プランジャー126'に例示的に配置されており、プランジャー126'内のアパーチャ128を介して近位ポンプ部124内の圧力を感知する。
代わりに、圧力センサP2が遠位プローブ部110内の機械的接続230に配置されてもよい。図4A及び制限オリフィス140に関して上述した態様と同様に、例示的な一実施形態では、機械的接続230の上流に、よって圧力センサP2の上流、遠位プローブ部110内に制限オリフィス240が配置され得る。同様に、制限オリフィス240の下流のストリームプローブ100'の体積のみが関係し、ストリームプローブ100'が圧力源ではなくフロー源としてより近く又は近似的に振る舞うため、制限オリフィス240の存在は、圧力計P2の応答時間を向上させる。制限オリフィス240の上流の体積は、より無関係になる。
しかし、圧力センサP1の場合、制限オリフィス240はオプションであり、遠位プローブ部110内の圧力の適切な感知のために必要ではないことに留意されたい。
例示的な一実施形態では、圧力センサP2は、代替的に又は追加でフローセンサとして、例えば差圧センサとして機能し得る。当業者は、遠位プローブ先端112を介する第2の流体のフローは、圧力センサP2等の圧力センサ以外の手段によって、例えば音響的に又は熱的に検出され得ることを認識するであろう。実施形態はこのコンテキストに限定されない。したがって、プランジャー126の移動は、遠位プローブ先端112を介する圧力、体積又は質量フローの変化を引き起こす。
図4Aのストリームプローブ100に関して説明した態様と同様に、図示されるように、図4Bのストリームプローブ100'において、近位ポンプ部124の体積V3が遠位プローブ部110の体積V1より大きくてもよい。あるいは、2つの体積が互いに等しく、又は体積V3が体積V1より小さくてもよい。
図4Aに示されるストリームプローブ100内に制限オリフィス140が存在する場合、制限オリフィス140の下流の体積V2の部分内の体積及び体積V1と比較して、体積V3及び制限オリフィス140の上流の体積V2の部分は圧力応答についてより無関係になることに留意されたい。
同様に、図4Bに示されるストリームプローブ100'内に制限オリフィス240が存在する場合、制限オリフィス240の下流の体積V1と比較して、体積V3及び制限オリフィス240の上流の体積V1は圧力応答により無関係になる。
更に、当業者は、制限オリフィス140及び240によるフローの制限が、制限オリフィスを取り付ける代わりに、中央パラメータセンシング管状部120又は遠位プローブ部110を波形に(crimping)することにより実現され得ることを認識するであろう。本明細書で定められるように、制限オリフィスは管の波形にされた部分を含む。
あるいは、歪みゲージ132によって表されるパラメータセンサが遠位プローブ110の外面上に配置されてもよい。歪みゲージ132は近位ポンプ部124の外面上に配置されてもよい(図示無し)。遠位端112における気泡の放出を求めるための代替的な方法として、歪みゲージ132によって感知された歪み値は時間の関数として直接読み取られ又は圧力値に変換されて、図5と同様な読み出しを生成してもよい。
図4Cは、ストリームプローブ内のフローの妨害を示し、よって歯垢又はストリームプローブ内のフローを妨げる他の物質を示し得るパラメータを感知しつつ、管を介してプローブ先端に略連続的な気体ストリームを供給するポンプ部の他の例示的な実施形態を有するストリームプローブの、より具体的には図4A及び図4Bの他の例示的な実施形態を示す。より具体的には、ストリームプローブ100"は、動作中は一般的に好ましい略連続的なフローを供給するよう設計された流体ポンプを例示する。ストリームプローブ100"は図4Aのストリームプローブ100と概して同様であり、遠位プローブ部110、遠位プローブ先端112、及び中央パラメータセンシング部120'を含み、中央パラメータセンシング部120'は、圧力センサによって表されるパラメータセンサPを更に含み、更に圧力センサPの上流に制限オリフィス140を含み得る。
ストリームプローブ100"は、近位ポンプ部124の中心線軸X1−X1'沿いに往復運動する往復プランジャー126に代わり、近位ポンプ部124の長軸X2−X2'を横断する方向にダイアフラムポンプ150が往復運動する近位ポンプ部142によって近位ポンプ部124が置き換えられる点で、ストリームプローブ100と異なる。ダイアフラムポンプ150の往復運動の方向は両方向矢印Y1−Y2によって示されている。ダイアフラムポンプ150は、(シャフトによって表されている)モーター152と、フレキシブル又は圧縮可能ダイアフラム158に動作的に接続される接続ロッド又はシャフト156に動作的に接続されるエキセントリック機構154とを含む。
エアインテーク供給経路160は近位ポンプ部142と流体連結し、周囲から近位ポンプ部142に空気を供給する。エアインテーク供給経路160は、大気からの吸引口162aと近位ポンプ部142への下流接続162bとを有するインテーク導管部材162を含み、これにより、吸引口162aを介する近位ポンプ部142と大気との間の流体連結を提供する。吸引フロー遮断デバイス164、例えばチェックバルブがインテーク導管部材162内の吸引口162aと下流接続162bとの間に配置される。吸引フィルタ166、例えば(W.L.Gore&Associates,Inc.,Elkton,Maryland,USAによりGore−Tex(登録商標)の商品名で販売されている)拡張ポリテトラフルオロエチレンePTFE等の多孔質な材料からつくられる薄膜が、エアインテーク供給経路160のインテーク導管部材162内に、吸引フロー遮断デバイス164の上流、且つ定期交換を容易にするために一般的には吸引口162aの近傍に配置されてもよい。
中央パラメータセンシング部120'は、近位ポンプ部142の吐出流路としての役割も果たす。近位ポンプ部吐出流路フロー遮断デバイス168、例えばチェックバルブが中央パラメータセンシング部120'内のパラメータセンサP及び存在する場合は制限オリフィス140の上流に配置される。
したがって、遠位先端112は、遠位プローブ部110、中央パラメータセンシング部120'、及び近位ポンプ部142を介して、エアインテーク供給経路160のエアインテーク導管部材162の吸引口162aと流体連結する。
モーター152の動作中、モーター152は矢印Zによって示される方向に回転し、エキセントリック機構154は、これにより接続ロッド又はシャフト156に往復運動を与える。接続ロッド又はシャフト156がモーター152に向かって矢印Y1の方向に動くとき、フレキシブル又は圧縮可能ダイアフラム158もモーター152に向かって矢印Y1の方向に動き、これにより近位ポンプ部142の内部体積V'内の圧力を低下させる。圧力低下によりポンプ部吐出流路フロー遮断デバイス168は閉じて吸引フロー遮断デバイス164が開き、これにより吸引口162aを通じて空気が引き込まれる。
接続ロッド又はシャフト156がモーター152から離れ且つフレキシブル又は圧縮可能ダイアフラム158に向かって矢印Y2の方向に動き、フレキシブル又は圧縮可能ダイアフラム158が同様に内部体積V'に向かって矢印Y2の方向に動き、これにより近位ポンプ部142の内部体積V'内の圧力上昇を引き起こすまで、エキセントリック機構154は矢印Zの方向に回転し続ける。圧力上昇により吸引フロー遮断デバイス164が閉じてポンプ部吐出流路フロー遮断デバイス168が開き、これにより、空気が中央パラメータセンシング部120'及び遠位プローブ部110中を流れ、遠位先端112を通過する。
制限オリフィス140が配備され、上記したように近位ポンプ部142の吐出流路としての役割も果たす中央パラメータセンシング部120'内に配置される場合、ポンプ部吐出流路フロー遮断デバイス168と制限オリフィス140との間の体積V"によって、ローパスフィルタ機能が果たされる。したがって、制限オリフィス140が配備される場合、ポンプ部吐出流路フロー遮断デバイス168は制限オリフィス140の上流でなければならない。結果として、遠位先端112への空気流から高周波数パルセーションが除去される。
図4A及び図4Bのポンプ部124のピストン又はプランジャー126、126'及び図4Cの液体ダイアフラムポンプ150は、遠位先端112又は遠位プローブ部110における所望の圧力変化を生じさせるために使用され得る容積型ポンプ又はコンプレッサの例である。遠位先端112における所望の圧力又はフロー変化を生じさせるために、他の種類の容積型ポンプ若しくはコンプレッサ、又は遠心ポンプ若しくは当該技術分野で知られる他の種類のポンプを使用してもよい。
図6は、異なる表面に関して測定された圧力振幅データを、プローブ先端112と図1の表面13又は図2の表面31及び33との間の距離d1又はd2の関数として示す。内径0.42mmのプラスチック針が使用された。0.6mmまでの距離で明確な違いが見られ、最も疎水性の表面(テフロン(登録商標))が最大の圧力信号を与える一方、最も親水性の表面(歯垢)が最も低い信号を与える。
図5及び図6に示されるデータは、制限オリフィスを含まずに取得されたことに留意されたい。
図1乃至図6は、例えばプローブ先端112における歯垢の検出方法として、(圧力、圧力変動、気泡サイズ、及び/又は気泡放出レートによる)先端からの気泡放出の測定を含む、表面上の物質の存在を検出する第1の方法を表した。図1、図2、及び図6に関して上記したように、プローブ先端112は、図1の表面13又は図2の表面31及び33等の表面から距離d1又はd2離れて配置される。
気泡生成及び検出方法を空気等の気体である第2の流体に関して説明してきたが、方法は、第2の流体が液体であり、気泡の代わりに水滴が生成される場合にも有効であり得ることに留意されたい。
更に、方法は定圧及び変化する流体アウトフローの測定によって作用されてもよい。装置は、第2の流体の変化する圧力及び/又は変化するフローを記録し得る。例示的な一実施形態では圧力が記録されて第2の流体のフローが制御され、例えばフローは一定に保たれる。他の例示的な実施形態ではフローが記録されて第2の流体の圧力が制御され、例えば圧力は一定に保たれる。
本開示の例示的な実施形態に係る表面上の物質の存在を検出する第2の方法において、図7は、図4A、図4B、又は図4Cのプローブ110のプローブ先端112の閉塞の影響を示す。図7に示されるプローブ、ストリームプローブ管状部材、又はストリームプローブ110'は、近位端138及び内部チャネル134を含む。ストリームプローブ又はストリームプローブ管状部材110'は、ストリームプローブ110'が、遠位先端112'から出たために第2の流体30'と示される、遠位先端112を介する第2の流体媒体の通過が遠位先端112'が表面31又は33に触れると可能になり、また、第2の流体媒体30'も面取りされた開口136を通過可能になるような角度αで水平面31又は33に対して面取りされた開口136を有する面取りされた又は斜めに切られた遠位先端112'を含む点で、図4A、図4B、又は図4Cのストリームプローブ110と異なる。開口136の面の角度αは、遠位先端112'が表面31又は33に触れ、粘弾性の物質116等の物質116が遠位先端112'の開口136を介する流体の通過を少なくとも部分的に妨害する場合に、遠位先端112'を介する第2の流体媒体30'の通過が少なくとも部分的に妨害されるような角度である。流体の通過の妨害を検出するためには単一のプローブ110'しか要求されないが、例示的な一実施形態では、流体の通過の妨害を検出するために、システム3000として少なくとも2つのプローブ110'が配備されることが望ましい場合がある(図13乃至図17及び図19乃至図21に関する後の説明を参照されたい)。
代替的に、図1、図2、図4A、又は図4Bのプローブ先端112は、面取りされた又は斜めに切られた端部を有さず、表面31又は33に対してある角度(例えば角度α)で保持される。例示的な一実施形態では、物質は水とゼロでは無い接触角を有する。例示的な一実施形態では、水とゼロでは無い接触角を有する物質はエナメル質である。
図7の左側に示されるように、プローブ先端112'が歯面31からの粘弾性の物質116によって塞がれると、図7の右側に示されるように、プローブ先端112'が塞がれておらず(第2の流体媒体30')、先端112'又は歯面33に歯科物質を有さない場合と比較すると、気体30等の流体は先端112'から流れ出にくくなる。
図8は、左側に示される、歯垢が存在しないエナメル質上、及び、右側に示される、歯垢層が存在するサンプル上を移動するベベルを有する金属針等のプローブ先端の圧力信号を示す。歯垢が存在するか否かを検出するために、歯垢による針開口の閉塞に起因する、右側で見られる圧力上昇を感知することができる。
図9は、水領域1、PMMA(ポリメチルメチルアクリレート)領域2、歯垢が存在するPMMA領域3、及び水領域4の上を移動するテフロン(登録商標)先端からのエアフローの圧力信号を示す。先端は(左から右に)水領域1、PMMA領域2、歯垢が存在するPMMA領域3、及び再び水領域4の上を移動する。テフロン(登録商標)先端は図示されていない。
本明細書で差圧に言及するとき、次の考察を考慮すべきである。図8において、流体ストリーム30は、左のパネル上で圧力が上昇する場合、妨害される。したがって、関心パラメータは平均圧力、又は平均若しくは瞬間ピーク圧力である。
対照的に、図9はより小さいプローブ先端に関する同じ信号を示し、この場合、はるかに滑らかな信号が得られる。
図8及び図9に示されるデータは、制限オリフィスを含まずに取得された。
図2に係る予備実験では、以下が認められた。
図3に示されるように、(濡れた状態の)歯垢はきれいなエナメル質よりも親水性である。
図3に示されるように、(濡れた状態の)歯垢はきれいなエナメル質よりも親水性である。
先端からの気泡の放出は、圧力変化によって測定することができる。一定の変位速度を有するシリンジは、時間の関数として圧力の鋸歯状信号を与える。これは、図5のオシロスコープ図に示されている。
先端と表面とが近接する場合、鋸歯状信号の振幅は、探査される表面の親水性が低い場合よりも表面の親水性が高い場合の方が小さい。したがって、親水性が高い表面上ではより小さい気泡が放出される。これは、異なる表面に関して先端から表面までの距離d1又はd2(図1及び図2参照)の関数として圧力信号振幅が与えられる図6の測定結果によっても示される。
図7に係る予備実験では、以下が認められた。
シリンジが一定の変位速度で使用される場合、塞がれていない先端は、気泡の定期的な放出及び圧力対時間の鋸歯状パターンを与える。図8の左側のパネルを参照されたい。
シリンジが一定の変位速度で使用される場合、塞がれていない先端は、気泡の定期的な放出及び圧力対時間の鋸歯状パターンを与える。図8の左側のパネルを参照されたい。
歯垢材料を通過する金属先端による実験では、歯垢材料による先端の閉塞及び空気による先端の開放のため、圧力上昇及び圧力対時間の不規則な鋸歯状パターンが認められた。図8の右側のパネルを参照されたい。
テフロン(登録商標)先端による実験において、先端開口における異なる材料(左から右に、先端が水中、先端がPMMAの上、歯垢が存在するPMMAの上、そして再び先端が水中)に関して、明確な信号の違いが見られた。
これらの予備実験は、(圧力、圧力変化、気泡サイズ、及び/又は気泡放出レートによる)先端からの気泡放出の測定が、先端における歯垢を検出する適切な方法となり得ることを示す。したがって、上記に照らして、少なくとも、本開示の例示的な実施形態の新規な特徴は以下の通りである。
(a)流体媒体14がプローブ先端12において表面13と接触させられ、先端12と表面13との間に相互作用ゾーン17を生成し(図1参照);(b)相互作用ゾーン17内の媒体14の形状及び/又は動態が表面13の特性及び/又は表面13に由来する材料に依存し;(c)相互作用ゾーン17内の媒体14の圧力、形状、及び/又は動態が検出されるという点で特徴付けられる。
(a)流体媒体14がプローブ先端12において表面13と接触させられ、先端12と表面13との間に相互作用ゾーン17を生成し(図1参照);(b)相互作用ゾーン17内の媒体14の形状及び/又は動態が表面13の特性及び/又は表面13に由来する材料に依存し;(c)相互作用ゾーン17内の媒体14の圧力、形状、及び/又は動態が検出されるという点で特徴付けられる。
表面上の物質の存在を検出する2つの異なる方法の先の記載に関して、図4A及び図4Bの近位ポンプ部124は実効的にはシリンジとして機能する。プランジャー126又は126'の遠位への押し込み中、図4A及び図4Bの先端112又は図7の先端112'における気体若しくはエアフロー又は液体フローは、先端から外側に押し出され得る(プランジャーが押されるとき)。
プランジャー126又は126'の後退又は後進中、気体若しくはエアフロー又は液体フローが先端112又は112'において内側に且つプローブ管110又は110'の方向に吸引され得る。例示的な一実施形態では、プランジャー126又は126'は、電動歯ブラシの毛の振動と共に自動的に作動され、又は、毛が振動していない状態で作動される(例えば、デンタルフロスデバイスと同じ原理を使用して)。
したがって、シリンジ又はポンプ124は、気体又は空気のフローが先端112から遠く且つエナメル質の方向に注入されて気泡32又は34を生成するストリーム方法のために使用することができる。気泡及び位置は光学的に検出され、表面が歯垢のように親水性が高いか又はエナメル質のように親水性が低いかに基づき、気泡の位置は歯垢が存在するか否かを決定する。すなわち、表面は、検出対象の物質の親水性とは異なる親水性を有し、例えばエナメル質は歯垢より低い親水性を有する。歯垢が存在するか否かに関わらず、先端はエナメル質から特定の距離d2(図2参照)離れた位置に配置される。
あるいは、気泡法のために圧力センシングを使用することもできる。同様に図2及び図4Aを参照して、シリンジとして機能する同じポンプ部124は、次のように圧力センシング方法のために使用することができる。エナメル質表面31又は33に向けて流体が注入される。プローブ先端112は、例えば図2のd2のように、始めはエナメル質表面から特定の距離離れて配置される。図5及び図6に示され及び上記に記載されるように、圧力信号が観測される。気泡放出測定は、上記したように圧力及び/又は圧力変化によって実行される。
本開示の例示的な実施形態に係る表面上の物質の存在を検出する第2の方法では、図7に示されるように、遠位先端112を介する気体30等の第2の流体の通過は、遠位先端112'の開口からの流体の通過を少なくとも部分的に妨害する物質と相関する信号の測定に基づく、表面31上に存在し得る物質116の検出を可能にする。上記したように、信号は圧力上昇若しくは減少、又は他の変数における変化を含み得る。
例示的な一実施形態では少なくとも2つのプローブ110'が使用されるため、図7は、表面上の物質の存在を検出するためのシステム300を示す。例示的な一実施形態では、上記のように、プローブ110'は表面31又は33と接触する。表面33に歯垢が存在しない場合、すなわちフローが妨害されない場合、圧力信号は図8の左側のパネルに示されるようである。表面に歯垢、例えば粘弾性の材料116が存在する場合、圧力信号は図8の右側のパネルに示されるようである。
実践的なアプリケーションに関して、1つ以上のプローブ110'は非常に小さい、例えば0.5mm未満の直径を有し、プローブ先端112'がばね機能により歯面33と接触すると考えられる。したがって、歯垢に到達すると、管はこの歯垢層内に押し込まれる。図8に示される圧力信号は、単一のプローブが接触した状態で得られた。
再び図7を参照して、表面上の物質の存在を検出する第2の方法の代替的な例示的実施形態では、図4A及び図4Bの近位ポンプ部の近位端124'に向かう近位方向のプランジャー126又は126'の後進によってエナメル質表面から離れるように流体が吸引される。流体又は気体インフロー30は、今度は(単純さのために内部チャネル134の外部に示される)点線の矢印によって示される流体又は気体アウトフロー35になる。歯垢116が存在する場合、歯垢はプローブ先端における開口を塞ぐ程度に十分大きいか、又はプローブチャネル内に吸引される程度に十分小さい。圧力信号は図8の反転バージョンになる。低い方の圧力は、歯垢が存在する場合に得られる。
本明細書で定められるように、プローブ先端を介する第2の流体の流れの方向に関わらず、閉塞又は妨害は、先端自体を、完全に塞ぐ場合を含み、少なくとも部分的に塞ぐ物質による直接の妨害を意味し、又は、閉塞又は妨害は、プローブ先端の近傍における物質の存在による第2の流体の流れ場の乱れによる間接的な妨害を意味し得る。
プランジャーの定速を保つことによる第1及び第2の方法の実行に加えて、方法は、近位ポンプ部内の圧力を一定に保ち、プローブ先端からの第2の流体の変化するアウトフローを測定することにより実行することができる。読み出し及び制御は、様々な態様で構成することができる。例えば、装置は第2の流体の変化する圧力及び/又は変化するフローを記録してもよい。例示的な一実施形態では、圧力が記録され、第2の流体のフローが制御され、例えば、フローが一定に保たれる。他の例示的な実施形態では、フローが記録されて第2の流体の圧力が制御され、例えば、圧力が一定に保たれる。
更に、システム300のために2つ以上のプローブ110'が配備される場合、プローブ110'のうちの1つは、遠位プローブ先端112'を介する第2の流体のフローの圧力センシングを含み、一方、別のプローブ110'は歪みセンシング又はフローセンシングを含み得る。
更に、第1の気泡検出の方法又は第2の妨害の方法の両方に関して、第2の流体のフローは一般的に層流であるが、第2の流体の乱流も本開示の範囲に含まれる。
図10は、本開示の例示的な一実施形態に係る表面上の物質の存在を検出するための検出装置又は器具を示し、検出装置は、ストリームプローブを歯ブラシ等の歯科用器具に組み込むことにより、表面上の物質の存在を検出するための検出装置を形成することによって例示される。
慣習的に、例えば上述したPhilips Sonicare(登録商標)歯ブラシ等の電気歯ブラシシステムは、ボディ要素とブラシ要素とを含む。通常、電子部品(モーター、ユーザインターフェイスUI、ディスプレイ、バッテリー等)はボディ内に収容され、一方、ブラシ要素は電子部品を含まない。このため、ブラシ要素は手頃なコストで容易に交換及び取替可能である。
例示的な一実施形態では、検出装置又は器具200、例えば電気歯ブラシ等のデンタルクリーニング器具は、近位ボディ部210及び遠位口腔挿入部250によって構成される。近位ボディ部210は、近位端212及び遠位端214を定める。遠位口腔挿入部250は、近位端260及び遠位端262を定める。遠位端262は、ブラシ基部256及び毛254を含む振動ブラシ252と、図4Aに関して上記した空気ストリームプローブ100又は図4Bに関する100'等の空気ストリームプローブ又は液体ストリームプローブの遠位部分とを含む。図4A、図4B、及び図4Cと併せて、検出装置200は、能動部品、例えば機械、電気、又は電子部品が近位ボディ部210内に組み込まれ又はその外面上に配置される一方、遠位プローブ部110等の受動部品が、限定はされないが遠位口腔挿入部250によって例示される遠位部分内に組み込まれ又はその上に配置されるよう構成される。より具体的には、プローブ110のプローブ先端112は、毛254と混ざり合うように毛254の近くに又は毛254内に組み込まれ、一方、中央パラメータセンシング管状部120及び近位管状シリンジ部124は、近位ボディ部210内に組み込まれ又はその外面上に配置される。したがって、遠位プローブ部110は少なくとも部分的に遠位口腔挿入部250と接触する。遠位プローブ先端110の一部111は近位ボディ部210上に配置され、よって近位プローブ部である。
例示的な一実施形態では、ブラシ基部256及び毛254を含むブラシ252を含む遠位口腔挿入部250は、交換可能又は取替可能である。すなわち、近位ボディ部210は遠位口腔挿入部250に取り外し可能に取り付け可能である。
能動部品を備える近位ボディ部210への遠位口腔挿入部250の接触は、近位ボディ部210上の機械的接続230によって提供され、機械的接続230は、近位ボディ部210の遠位端214と遠位口腔挿入部250の近位端260とを接続し、よって、空気流が生成され、例えば図4BのパラメータセンサP2又は図4A若しくは図4CのパラメータセンサPの位置で圧力が感知されるよう、遠位プローブ先端110の一部111を遠位口腔挿入部250上に配置された遠位プローブ先端110に接続するよう配置される。圧力センサ信号に基づき、プローブ先端112の領域に歯垢が存在するか否かが判断される。したがって、近位ボディ部210は、機械的接続230を介して、図10では遠位口腔挿入部250として示される遠位プローブ部に取り外し可能に取り付け可能である。図10では、検出装置又は器具200は、遠位口腔挿入部250と近位ボディ部210とが互いに取り外し可能に取り付け可能であり、よってどちらも取替可能なように示されているが、検出装置又は器具200は、遠位口腔挿入部250及び近位ボディ部210が互いから容易に分離することができない単一の統合複合装置又は器具として構成又は形成されても良いことを当業者は認識するであろう。
更に、図4A、図4B、及び図4Cに示されるように、ブラシ252、ブラシ基部256、又は毛254を有さずに独立してストリームプローブ100、100'、又は100"を使用してもよい。検出装置又は器具200は、表面上の物質の存在を検出するために、ブラシ252、ブラシ基部256、又は毛254を有して又は有さずに、歯科及び非歯科用途のいずれにも適用することができる。
検出装置又は器具200がデンタルクリーニング器具として設計される場合、プローブ110は、ユーザへの一切の潜在的な不快感を低減するために、毛254の回転剛性と略等しい回転剛性をもたらし、動作中、プローブ110が毛の動作のスイープ領域及びタイミングと略等しい領域をスイープするよう、寸法設定され及び材料が選択され得る。剛性の設計に寄与する変数は、選択される材料の寸法、質量、及び弾性係数を含む。
例示的な一実施形態では、能動部品は上記したような圧力センサPを含む。図1に関して、センサPは相互作用ゾーン17内の媒体14の形状及び/又は動態を感知するために使用される。このようなセンサは使用上ロバスト且つ単純であるという利点を有する。センサPは、それらと電気通信するコントローラ225を含む検出電子機器220と電気通信する。
他の例示的な一実施形態では、能動部品は、相互作用ゾーン17内の媒体14の形状及び/又は動態を感知するために、光学的、電気的、又はアコースティックセンサ、例えばマイクロフォン等を含み得る。
コントローラ225はプロセッサ、マイクロコントローラ、SOC(system on chip)、FPGA(field programmable gate array)等であり得る。本明細書に記載される様々な機能及び動作を実行するためのプロセッサ、マイクロコントローラ、SOC、及び/又はFPGAを含み得る1つ以上の要素は、まとめて、例えば特許請求の範囲に記載されるようなコントローラの一部である。コントローラ225は、単一のプリント基板(PCB)上に取り付けられ得る単一の集積回路(IC)チップとして提供されてもよい。あるいは、例えばプロセッサ、マイクロコントローラ等を含むコントローラの様々な回路部品は、1つ以上の集積回路チップとして提供される。すなわち、様々な回路部品は1つ以上の集積回路チップ上に配置される。
更に、能動部品は、空気又は液体ストリームを生成する方法を可能にする。空気及び液体の複合ストリームも可能である。方法は電気的又は機械的ポンピング方法を含み、機械的方法は機械的に作動されるばね部品を含み、例えば、図4のプランジャー126が機械的に作動される。例示的な一実施形態では、空気流の生成方法は電気的ポンピング原理であり、これは上記の圧力センシング要素と良好に結びつく。他の例示的な実施形態では、空気が他のガス、例えば窒素又は二酸化炭素等の他の気体によって置き換かえられ得る。このような例示的な実施形態では、近位ボディ部210は流体の一定圧力又は一定フローを生成するために、近位ポンプ部124及びプランジャー126又は他の種類のポンプを含み得るが、近位ボディ部210は、近位ボディ部210内に取り付けられ得るようサイズ設計され、弁制御システム(図示無し)によって一定圧力又は一定フローを提供可能な圧縮ガスの容器(図示無し)を含んでもよい。
他の例示的な実施形態では、受動部品は、例えばプローブ110及び遠位先端112等(図10参照)、端部に開口を有する管のみを含む。
他の例示的な実施形態では、能動部品と受動部品との接続は、圧力センサの出力への管の機械的カップリング230によって実現される。このようなカップリングは、理想的には実質的に圧密である。圧力値は比較的低い(<<1bar)。
動作中、センシングは歯磨きプロセス中に繰り返し実行される。好ましい例示的な実施形態では、センシングは>1Hz、より好ましくは>5Hz、一層好ましくは>10Hzの周波数で実行される。このような高周波数実施形態は、個別の歯の上で複数回の測定が行われ得るため(所与の歯の上での滞在時間は、通常1〜2秒程度)、歯ブラシが次々に歯を移動するのに伴う、歯垢除去の動的且つリアルタイム測定を容易化する。
図1に関して、上記したように、相互作用ゾーン17内の媒体14の形状及び/又は動態は、表面13の特性及び/又は表面13に由来する物質に依存し、相互作用ゾーン17内の媒体14の圧力、形状、及び/又は動態が検出され、コントローラ225により、特定の歯面13において、歯垢の所定の最大許容可能レベルを上回る歯垢のレベルが検出されるか否かに関して決定がされる。
陽性の検出がされた場合、その特定の歯面13における継続されたクリーニングにより当該歯面13において所定の最大許容可能歯垢レベルが達成されるまで、電気歯ブラシのユーザに進行又は前進信号は送られない。
歯垢のレベルが最大許容可能歯垢レベル以下に下がると、すなわち、陰性の検出がされると、ユーザに進行信号又は前進信号が送られ、歯科用装置の振動ブラシ及びプローブ先端を移動させることにより隣の歯又は他の歯に進むことの許可がユーザに通知される。
あるいは、陽性の検出がされた場合、組み込みストリームプローブ歯垢検出システムを備える電気歯ブラシのユーザに、その特定の歯を磨き続けるよう信号が送られる。
更に、ブラシ内の受動部品の複数の好ましい動作モードが存在する。
第1のモード動作では、管の先端が(Philips Sonicare(登録商標)歯ブラシでは約265Hzで振動する)ブラシの振動から音響的に分離されるよう、管が構成される。これは、管をブラシヘッドに弱くのみ結合することによって達成され得る。
更なる動作モードでは、管は、管の先端が静的であるよう構成される。これは、駆動周波数でプローブの先端が静的な振動ノードにあるよう、管の機械的特性(剛性、質量、長さ)を選択することにより達成され得る。このような状況は、開口に近い管の端部に追加の重りを付加することにより援助され得る。
図10の遠位口腔挿入部250の部分断面図である図11に示されるように、他の例示的な一実施形態では、センシング機能に対する歯ブラシの毛の動きの影響は、管の周囲に毛が除去された空間258を組み込むことにより低減される。より具体的には、図11のプローブ110は、基部256及び基部256から略垂直に突出する毛254を含むブラシヘッド252を示す。空間258は、プローブ先端1121の周囲の除去された毛ワイヤーによって位置決めされる。プローブ先端1121は、表面31又は33に向けて流体がプローブ110を通過することを可能にするために、プローブ先端1121が直角エルボ1122を含む点で、プローブ先端112及び112'と異なる。
例示的な一実施形態では、空間258は、毛254の振動の振幅と同程度であるべきである。実践では、毛は約1〜2mmの振幅で振動する。これはセンシングをよりロバストにする。
更なる例示的な実施形態では、図12に示されるように、プローブ先端1121は毛254によって覆われる領域を遠方に越えて配置される。これは、ブラシの現在位置の向こうに存在する歯垢、例えば、不完全なブラッシング動作によって取りそこなった歯垢を検出することを可能にする。
更なる詳細として、理想的には、ブラッシング中のブラシ252の歯面31又は33に対する角度は45°である。理想的には、プローブ先端1121の歯面31又は33に対する角度は約0°である。歯面31又は33に対して45°の先端1121を有する少なくとも2つのプローブ110、並びに対応する少なくとも2つの圧力センサ及び2つのポンプがあり、常に1つのプローブが表面31又は33に最適に面する直線運動である。
他の例示的な実施形態では、ブラシ内に複数のプローブが組み込まれる。これらのプローブは代替的に、少なくとも以下のように配置又は使用され得る。
(a)(取りそこなった)歯垢をより効果的に感知するために、ブラシのあちこちの複数の位置に配置される、又は
(b)歯垢除去の程度及び有効性を決定するための差測定のために使用される。
(a)(取りそこなった)歯垢をより効果的に感知するために、ブラシのあちこちの複数の位置に配置される、又は
(b)歯垢除去の程度及び有効性を決定するための差測定のために使用される。
例示的な一実施形態では、単一の能動的センシング要素及び複数の受動要素によって、例えば単一の圧力センサに取り付けられた管等によって複数のプローブが実現され得る。あるいは、複数の能動及び受動センシング要素が使用されてもよい。
上記したように、管の端部は多様な寸法を有し得る。代替的な例示的実施形態では、管の先端は、機械的なスペーサを使用して歯面から離される。一部の例示的な実施形態では、開口は管に対して角度をつけられてもよい。
図13乃至図22は、複数のストリームプローブにより表面上の物質の存在を検出するための上記原理を採用する、表面上の物質の存在を検出するための検出システム3000の例を示す。より具体的には、本開示の例示的な一実施形態では、システム3000は、図4A及び図10に関して上記したような近位ポンプ部124及びプランジャー126を有する空気ストリームプローブのような、表面上の物質の存在を検出するための検出装置1100を含む。しかし、近位ポンプ部124及びプランジャー126の代わりに、図4Cに関して上記した近位ポンプ部142及びダイアフラムポンプ150を配備して、近位ポンプ部124及びプランジャー126に関して後述される態様と同様にして表面上の物質の存在を検出するための略連続的なフロー1100を供給してもよいことに留意されたい。
近位ポンプ部124は、第1の脚1011及び第2の脚1022を定める遠位T字接続101によって構成される中央パラメータセンシング管状部120'を含む。遠位プローブ先端3112を有する第1のストリームプローブ301は第1の脚1011と流体連結し、遠位プローブ先端3122を有する第2のストリームプローブ302は第2の脚1012と流体連結する。
第1のストリームプローブ301の近傍のブランチ接続312を介して、圧力センサP3が第1の脚1011に接続され、第2のストリームプローブ302の近傍の分岐接続322を介して、圧力センサP4が第2の脚1012に接続される。図4Aに関して上記したストリームプローブ100、図4Bに関して上記したストリームプローブ100'、及び図4Cに関して上記したストリームプローブ100"についてと同様に、ストリームプローブ1100は、第1の脚1011内、中央パラメータセンシング管状部120'と第1の脚1011との間のジャンクション314の下流且つ第1のストリームプローブ301及び圧力センサP3の上流に配置される制限オリフィス3114を含んでもよい。同様に、第2の脚1012内、中央パラメータセンシング部管状部120'と第2の脚1012との間のジャンクション324の下流且つ第2のストリームプローブ302及び圧力センサP4の上流に、制限オリフィス3124が配置されてもよい。制限オリフィス3114及び3124の下流のストリームプローブ1100の体積しか関係しないため、ここでも、制限オリフィス3114及び3124の存在は圧力計P3及びP4の応答時間を向上させる。圧力降下は主に制限オリフィス3114及び3124にかけて起こり、ストリームプローブ1100は圧力源ではなくフロー源としてより近く又は近似的に振る舞うため、各圧力センサP3及びP4へのエアフローは略独立になる。制限オリフィス240の上流の体積はより無関係になる。単一のプランジャー126によって駆動される一方、圧力センサP3及びP4は圧力上昇をそれぞれ概して別々に感知することができる。
更に、当業者は、オリフィス3114及び3124によるフローの制限が、制限オリフィスを設ける代わりに、ジャンクション314及び324の近傍で遠位T字接続101を波形にすることにより実現され得ることを認識するであろう。上記と同様に、本明細書で定められるように、制限オリフィスは管の波形にされた部分を含む。
図10に示される検出装置200に関して上記したのと同様に、センサP3及びP4は、それらと電気通信するコントローラ225を含む検出電子機器220等の検出電子機器及びコントローラと電気通信する(図10参照)。
検出電子機器220による歯垢の検出時、コントローラ225は信号又はアクションステップを生成する。図10を参照して、例示的な一実施形態では、コントローラ225は、その特定の位置で自身の歯又は対象の歯を磨き続けるようユーザに伝えるための、ブザー等の一定の又は間欠的な音、及び/又は、一定の又は間欠的な光等に基づく聴覚又は視覚アラーム226と電気通信する。
例示的な一実施形態では、検出電子機器220によって検出された信号に基づき、コントローラ225は、歯の上に存在する歯垢の量の推定を生成するために、データを記録してもよい。データは、検出電子機器220及びコントローラ225と電気通信する画面125上に表示される数量の形式であってもよい。画面125は、図10に示されるように、近位ボディ部210上に配置され、又は近位ボディ部210から延びてもよい。当業者は、ユーザが画面上に表示されたデータをモニタするのに適した他の位置に画面125が配置され得ることを認識するであろう。
ユーザへの伝達は、ベースステーション228と無線信号228'を送受信するための送受信機として更に構成されたコントローラ225を含み、ベースステーション上には、聴覚又は視覚アラーム226をトリガーするための、又は、画面125上に数量若しくはアニメーション等の他の表示メッセージを記録するための信号を生成する様々なインジケータが備えられる。
あるいは、コントローラ225は、歯垢が認識されたことを知らせ、その位置でブラッシングを続けるようユーザに命令するアニメーションを画面231上に生成するアプリケーションソフトウェアを実行するスマートフォン229と無線信号229'を送受信するための送受信機として更に構成されてもよい。あるいは、アプリケーションソフトウェアは、検出された歯垢の量に関する量的データを示してもよい。
図14乃至図16は、毛354がブラシ基部356上に取り付けられたブラシ352を含む他の遠位口腔挿入部分350を示し、ブラシ基部356及び毛354の上端に向かって見ると、図14に示されるようである。図15及び図16で最も良く示されるように、図2及び図7の表面31及び33のような関心表面に向けて複数の流体のフローが方向変換されることを可能にする、遠位プローブ先端3112及び3122がブラシ基部356の水平な上面356'から略垂直に延びている。遠位プローブ先端3112及び3122の代替的な又は追加の位置が、図14のブラシ基部356の近位端の近傍の点線によって示されている。
同様に、図17乃至図19は、毛354がブラシ基部356上に取り付けられたブラシ352を含む別の遠位口腔挿入部360を含むという点でシステム3000と異なる、表面上の物質の存在を検出するためのシステム3010を示し、ブラシ基部356及び毛354の上端に向かって見ると、図17に示されるようである。図19に最も良く示されるように、ブラシ基部356の水平な上面356'に対して角度βで遠位プローブ先端3212及び3222がそれぞれ延び、これらは、複数の流体のフローが、図2及び図7の表面31及び33のような関心表面に向けて角度βで方向づけられることを可能にする。同様に、遠位プローブ先端3212及び3222のための代替的な又は追加の位置が、図17のブラシ基部356の近位端の近傍に点線によって示されている。
図14乃至図16及び図17乃至図19に示される遠位口腔挿入部350及び360は、(a)(圧力、圧力変動、気泡サイズ、及び/又は気泡放出レートによる)先端からの気泡放出の測定を含む、表面上の物質の存在を検出する第1の方法のために、又は(b)遠位先端を介する気体又は液体等の第2の流体の通過を含む、遠位先端の開口を介する流体の通過を妨害する物質と相関する信号の測定に基づき表面上の物質の存在を検出する第2の方法のためのいずれにも使用され得る。
図20乃至図22は、複数のストリームプローブと、共通の回転シャフト及びモーターによって作動され得る対応する近位ポンプ部とを含むシステム3000又はシステム3010の例示的な実施形態を示す。より具体的には、図20は、第1のストリームプローブ3100'を含む第1のストリームプローブ作動装置3100を示す。第1のストリームプローブ3100'は、図4Bに関して上記したストリームプローブ100'と同一であり、近位ポンプ部124及びプランジャー126、並びに遠位プローブ先端3112(図14乃至図16参照)又は遠位プローブ先端3212(図17乃至図19参照)を含み得る。図示されるようなカム機構であり得る回転−直動作動部材3102は、往復シャフト3106及びシャフト3106の近位端に配置されたローラー機構3108を介してプランジャー126と動作可能に連絡する。
ローラー機構3108は、カム機構3102の周縁上の経路を定めるチャネル3110と噛み合う。チャネル3110は経路沿いに延び、カムピーク3102a及びカムトラフ3102bを含む。カム機構3102はカムシャフト3104上に取り付けられ、カムシャフト3104により、例えば矢印3120が示すような反時計方向に回転させられる。カム機構3102の回転に伴い、ローラー機構3108が間欠的にピーク3102aによって押され又はトラフ3102bに引き込まれるため、シャフト3106に往復直線運動が付与される。これにより、プランジャー126に往復直線運動が付与され、ストリームプローブ3100'内に圧力が生成され、流体が遠位先端3112又は3212を通過する。当業者は、チャネル3110によって定められる経路がプランジャー126に略一定の速度を付与するよう設計され得ることを理解するであろう。あるいは、チャネル3110によって定められる経路は、近位ポンプ部124内に略一定の圧力を与えるよう設計され得る。ローラー機構3108がピーク3102aにあるため、プランジャー126は近位プランジャー部124の近位端124'から離れた位置にある。
図21は、第2のストリームプローブ3200'を含む第2のストリームプローブ作動装置3200を示す。第2のストリームプローブ3200'も、図4Bに関して上記したストリームプローブ100'と同一であり、近位ポンプ部124及びプランジャー126、並びに遠位プローブ先端3122(図14乃至図16参照)又は遠位プローブ先端3222(図17乃至図19参照)を含み得る。上記と同様に、図示されるようにカム機構であり得る回転−直動作動部材3202が、往復シャフト3206、及びシャフト3206の近位端に配置されたローラー機構3208を介してプランジャー126と動作可能に連絡する。
同様に、ローラー機構3208は、カム機構3202の周縁の経路を定めるチャネル3210と噛み合う。チャネル3210は経路沿いに延び、カムピーク3202a及びカムトラフ3202bを含む。カム機構3202は共通のシャフト3204に取り付けられ、シャフト3204によって、例えば矢印3220が示す反時計方向に回転させられる。カム機構3202の回転に伴い、回転機構3208が間欠的にピーク3202aによって押し出され又はトラフ3202bに引き込まれるため、シャフト3206に往復直線運動が付与される。これにより、プランジャー126にも往復直線運動が付与され、ストリームプローブ3200'内に圧力が生成され、遠位先端3122又は3222を介して流体フローが通過する。上記と同様に、当業者は、チャネル3210によって定められる経路が、略一定の速度をプランジャー126に付与するよう設計され得ることを理解するであろう。上記と同様に、代替的に、チャネル3110によって定められる経路は、近位ポンプ部124内に略一定の圧力を与えるよう設計され得る。第1のストリームプローブ作動装置3100とは異なり、ローラー機構3208が今度はトラフ3202bにあるため、プランジャー126は近位プランジャー部124の近位端124'の位置にある。
図22は、ストリームプローブ作動装置3100の第1の回転−直動作動部材3102がモーター3300に対して共通のシャフト3104の近位に設置され、一方、ストリームプローブ作動装置3200の第2の回転−直動作動部材3202がモーター3300に対して共通の3104の遠位に設置されるよう、共通のシャフト3104に動作可能に接続されたモーター3300を示す。当業者は、モーター3300による共通のシャフト3104の回転が、図20及び図21に関して上記したような複数のストリームプローブの動作を引き起こすことを認識するであろう。バッテリー又はウルトラキャパシタ等の近位ボディ部210(図10参照)上に設けられた電源270、あるいは外部電源への接続、又は他の適切な手段(図示無し)により、モーター3300に電力が供給される。
当業者は、ストリームプローブ作動装置3100又はストリームプローブ作動装置3200のいずれもが、図13に関して上記した複数の遠位プローブ先端3112及び3122、又は図17乃至図19に関して上記した複数の遠位プローブ先端3212及び3222を備える単一の空気ストリームプローブ1100を作動し得ることを認識するであろう。
当業者は、図20乃至図22に関して述べたストリーム作動装置3100及び3200が、所望の動作を実現するために採用され得る装置の例に過ぎないことを認識するであろう。例えば、当業者は、ストリームプローブ100"及び関連付けられたコンポーネントが、プランジャー126及び回転−直動作動部材3102若しくは回転−直動作動部材3202又は両方を置換し、モーター3300が、図4Cに関して上記したようなフレキシブル又は圧縮可能ダイアフラム158を含むダイアフラムポンプ150によって置換され得ることを認識するであろう。
モーター3300は、検出器電子機器220によって受け取られる信号に基づきモーター動作を制御するコントローラ225と電気通信する。図10に関して上記したアラーム226、画面125、ベースステーション228、及びスマートフォン229に加えて、図10に関連して、歯垢が検出されたことのユーザへの伝達は、歯垢が検出された場合にブラッシング強度を周波数、振幅、又は両方において上昇させるようモーター3300の動作を変化させることにより歯ブラシ駆動モードを変化させるようプログラミングされたコントローラ225を含み得る。振幅及び/又は周波数の上昇は、いずれも、その領域内でブラッシングを続けることをユーザに知らせ、よって歯垢除去の有効性を向上させる。あるいは、コントローラ225は、例えば歯垢が確認されたことを知らせるためにドライブトレーンを変更することにより、ユーザが通常のブラッシングから区別することができる異なる感覚を口内に生成するようプログラミングされてもよい。
歯ブラシへの気泡の供給は、ブラッシングの歯垢除去率も向上させ得る。
1つの可能な機構は、(i)気泡がきれいなエナメル質の箇所に付着し、(ii)ブラッシングが気泡を動かし、よって気泡の空気/水界面を動かし、(iii)歯垢材料は非常に親水性であり、よって水溶液中に留まることを好むため、気泡の端部が歯垢材料に接触すると、端部が歯垢材料をエナメル質からはがす傾向にあることである。別の可能な機構は、気泡の存在が流体内の局所的な混合及びせん断力を高め、よって歯垢除去率を高め得ることである。本明細書に記載される表面上の物質を検出する方法の他の例示的な実施形態は、信号の一次導関数のモニタリング、AC(交流)変調、及び歯肉検出のためのセンサの使用を含み得る。
粒子、特に、歯磨き粉に含まれる粒子が、200ミクロン(μm)と同程度の断面積を有し得る、ストリームプローブの小さな開口を妨害するという他の問題が考えられる。また、歯垢、及び、唾液、又は、食物粒子も、プローブの開口を妨害し得る。図23は、図4A、図4B、及び、図10に図示されるような開口136を具備するテフロンチューブである、遠位プローブ部110の遠位先端112の実際の写真を示している。図24では、開口136が、比較的大きい青い粒子を含む歯磨き粉により幾らか実験された後に妨害されている。最初に、部分的な妨害が生じ、圧力センサP、P1、又は、P2によって検出される圧力における増加につながる。この圧力増加は、実際には、その位置における表面が清潔であるとしても、処理コントローラ225によって、歯磨きされる位置上に存在する歯垢として解釈される。従って、間違った陽性信号が生成される(即ち、ユーザは、本当はそうではないのに、歯垢が存在すると考える)。上記妨害が解消されない場合、圧力増加は続き、間違った読み取りも生じ続ける可能性がある。最終的に、図24に示されるように完全に妨害された場合、フローが生じないため、遠位プローブ部110、ひいては、検出装置200全体が、使用できなくなる。
本開示の例示的な実施形態では、遠位先端110を通じて陽圧を供給するか、又は、遠位先端110内に負圧を誘起する、図10の近位ボディ部210内に組み込まれた、図4Aのストリームプローブ100又は図4Bのストリームプローブ100´、あるいは、一般的に遠位プローブ部110を通じて陽圧を供給するが、負圧を誘起するように構成された場合には、遠位プローブ部110を通じて負圧を誘起することができる、ポンプ部150を含む図4Cのストリームプローブ100´´は、歯磨き粉の粒子、歯垢粒子、又は、唾液による妨害を克服するために、ストリームプローブ100、100´、又は、100´´において動圧が供給又は誘起されるように構成される。ここで規定されるように、動圧は、ストリームプローブの遠位先端110における流体のよどみ点圧力における経時的変化、又は、ストリームプローブの遠位先端110における流体の静圧における経時的変化を表す。ここで、遠位先端における流体は、空気を含む気体、又は、液体である。また、よどみ点圧力における経時的変化、又は、静圧における経時的変化は、陽圧及び負圧の交互サイクルを含む。このため、動圧における変化は、よどみ点圧力における変化、あるいは、静圧における、独立した、又は、関連する変化、又は、それらの組み合わせを含む。あるいは、動圧は、妨害を生じさせる1又は複数の物質を除去するまで流体の圧力を略一定に維持することを含む(これにより、流体の圧力における減少が一般的に期待される)。
妨害の克服は、ストリームプローブ100、100´、又は、100´´に、追加的な動作モードを導入することによって達成される。これは、おそらく歯垢の検出のためではなく、妨害の除去、又は、ストリームプローブの非妨害の促進のためである。
これらの動作モードは、少なくとも以下の動作的特徴を含む。
前回の空気圧パルスよりも大きい空気圧パルスを周期的に発すること。
突起部の動きをスイッチオフ後、所定の期間、空気圧を維持すること。
ユーザが歯ブラシを使用しようとしていることを示す歯ブラシの動作を感知後、空気フローを活性化すること。つまり、空気は、空気がオフにされた後、ユーザが最初に歯ブラシを動かした場合に活性化される。
歯ブラシが、使用中、あるいは、ストレージ又はドッキングステーションにある場合に、ストリームプローブを通じて水フローを活性化すること。
使用中でない場合に、ストリームプローブを通じて、洗口殺菌液のフローを通すこと。
ストリームプローブチューブ内の殺菌液を引き出す(清掃する)ため、圧力を意図的に付与すること。
前回の空気圧パルスよりも大きい空気圧パルスを周期的に発すること。
突起部の動きをスイッチオフ後、所定の期間、空気圧を維持すること。
ユーザが歯ブラシを使用しようとしていることを示す歯ブラシの動作を感知後、空気フローを活性化すること。つまり、空気は、空気がオフにされた後、ユーザが最初に歯ブラシを動かした場合に活性化される。
歯ブラシが、使用中、あるいは、ストレージ又はドッキングステーションにある場合に、ストリームプローブを通じて水フローを活性化すること。
使用中でない場合に、ストリームプローブを通じて、洗口殺菌液のフローを通すこと。
ストリームプローブチューブ内の殺菌液を引き出す(清掃する)ため、圧力を意図的に付与すること。
前述の1又は複数の動作モードを実装するために、図4Cのストリームプローブ100´´は、妨害の発生を減少させるための、又は、ストリームプローブの既存の妨害を除去するための専用の動作モードを供給するように構成されてもよい。これにより、遠位プローブ部における空気圧は、歯垢検出モードにおいて使用される空気圧を超える。当該モードは、歯磨き前、歯磨き中、又は、歯磨き後のいずれかの期間で、間欠的に活性化されてもよい。
およそ100mL/m(ミリリットル/分)の比較的低い空気フロー、及び、関連する低い圧力(約10kPa(キロパスカル))が、歯垢を容易に検出するために十分である。この低いフローは、ユーザが、空気フローをほとんど感知できないという点で好適である。あるいは、高価でない圧力センサが、低い圧力を検出するために利用可能である。しかしながら、高価でない空気ポンプでさえ、例えば、一桁高いなどの、十分に高い圧力及びフローレートを生成可能である。この実施形態では、歯ブラシは、以下によって、この動作モードに入ることができる。
駆動信号の動作周波数及び/又は振幅を増加させることにより、フローを増大させるため、既存のポンプの動作を増大させる(これにより、圧力も増す)。
例えば、より広いチューブを使用したり、圧力センサの通過を回避したり、ポンプにおける圧力チャンバとプローブ/圧力センサ部との間の装置に用いられ得る制限を回避したりするなど、より低いフロー抵抗路を通じてフローをルーティングすることにより、プローブのフロー抵抗を減少させる。このようにして、フローを増大させることが可能である(また、これにより、圧力も増す)。
より高い圧力又はより高いフローの動作モードを有する別個のポンプに切り替える。あるいは、
(例えば、スプリング式バルブを開くことにより)圧力を突然開放する、及び、高い圧力流体のバーストを作成する前に、保持チャンバにおいて圧力が高まることを許容する。
駆動信号の動作周波数及び/又は振幅を増加させることにより、フローを増大させるため、既存のポンプの動作を増大させる(これにより、圧力も増す)。
例えば、より広いチューブを使用したり、圧力センサの通過を回避したり、ポンプにおける圧力チャンバとプローブ/圧力センサ部との間の装置に用いられ得る制限を回避したりするなど、より低いフロー抵抗路を通じてフローをルーティングすることにより、プローブのフロー抵抗を減少させる。このようにして、フローを増大させることが可能である(また、これにより、圧力も増す)。
より高い圧力又はより高いフローの動作モードを有する別個のポンプに切り替える。あるいは、
(例えば、スプリング式バルブを開くことにより)圧力を突然開放する、及び、高い圧力流体のバーストを作成する前に、保持チャンバにおいて圧力が高まることを許容する。
上記の動作モードは、個別に実装されてもよいし、2以上のモード又は全てのモードが、同時に実装されてもよい。
妨害を克服する、又は、遠位プローブ部110を妨害する可能性を減少させるべく、上記の追加的な動作モードを例示的に実装するために、図4C及び図10によれば、或る例示的な実施形態において、表面、又は、ストリームプローブ100´´上の物質の存在を検出するための検出装置は、ポンプ部142と、近位プローブ部111と、を含む近位ボディ部210を含む。ポンプ部142及び近位プローブ部111は、ポンプ部142と近位プローブ部111との間を流体連結するように配置された中央パラメータセンサ部120´を介して、互いに流体連結している。これにより、中央パラメータセンサ部120´は、ポンプ部142と近位プローブ部111との間の流体連結を可能にする。図10に示されるように、近位プローブ部111、中央パラメータセンサ部120´、及び、遠位プローブ部110間に流体連結を確立するため、近位プローブ部111は、コネクタ230を介して検出装置の遠位プローブ部110に接続されてもよい。
図7を参照して上述したように、検出装置100´´は、第1の流体11に浸漬されるように構成された遠位プローブ部110を含む。また、遠位プローブ部110は、遠位先端112を介する第2の流体30の通過を可能とするために、開口136を持つ遠位先端112を規定する。
検出装置100´´は、遠位先端112の開口136を介する流体30の通過を少なくとも部分的に妨害している物質116と相関する、圧力、フローレート、又は、歪みなどのセンサパラメータを表す信号の測定に基づいて、表面31,33上に存在し得る物質116を検出可能とすべく、遠位プローブ部110のセンサパラメータにおける変化を誘起するため、ポンプ部142が、遠位先端112を介する第2の流体30の通過を生じさせるように構成される。図4Cに既に示されているように、パラメータセンサPは、センサパラメータを表す信号を検出するため、中央パラメータセンサ部120´に配置される。
前述のように、コントローラ225は、パラメータセンサPによって感知された信号読み取り値を処理し、当該信号読み取り値が、遠位先端112の開口を介する流体130の通過を妨害する物質116を示すかどうかを決定する。コントローラ225は、ポンプ部142及びパラメータセンサPと電気的に連絡している。
検出装置100´´の使用中、コントローラ225が、信号読み取り値が、遠位先端112の開口136を介する流体130の通過を妨害する物質116を示すと決定した場合、コントローラ225は、遠位先端112,112´における動圧を変化させる信号を送信する。
より具体的には、或る例示的な実施形態において、コントローラ225は、動圧を変化させるとともに、遠位先端112の開口136を介する流体30の通過を妨害する物質116の除去を生じさせる近位ボディ部210の動作において変化を生じさせる信号を生成する。遠位先端112,112´の開口を介する流体30の通過を少なくとも部分的に妨害する物質116を除去するために、コントローラ225によってポンプ部142に送信された信号は、排出圧力、又は、フロー圧力、又は、その両方を変化させる。
或る例示的な実施形態では、遠位先端112,112´の開口を介する流体30の通過を妨害する物質116の除去のための動作ステップは、表面31,33上の物質116の存在を検出するための検出装置100´´の非使用中、コントローラ225が、遠位先端112,112´の開口を介する流体30の通過を少なくとも部分的に妨害する物質116の除去を生じさせる近位ボディ部210の動作における変化を生じさせる信号を生成するステップを含む。近位ボディ部210の動作における変化は、ポンプ部142が、遠位先端112,112´の将来的な妨害の発生の可能性を最小化するために必要な期間、又は、物質116の除去のために必要な期間、遠位プローブ部110を通じて流体をポンピングすることによって達成され得る。
ここで規定されるように、遠位先端112,112´の開口を介する流体30の通過を妨害し得る物質116の除去は、遠位先端112,112´の将来的な妨害の発生の可能性を最小化することを含む。遠位先端112の将来的な妨害の発生の可能性を最小化するために必要な期間は、表面31,33上の物質116の存在を検出するための検出装置100´´の使用前の期間、又は、表面31,33上の物質116の存在を検出するための検出装置100´´の使用後の期間である。
同様に、遠位先端112,112´の開口を介する流体30の通過を妨害する物質116を除去するために必要な期間は、表面31,33上の物質116の存在を検出するための検出装置100´´の使用前の期間、又は、表面31,33上の物質116の存在を検出するための検出装置100´´の使用後の期間であってもよい。
物質116の除去のための上記の動作ステップを実装するため、図10を参照して、近位ボディ部201は、遠位口腔挿入部250上に配置された突起部262を振動させるための振動シャフト114を含んでいてもよい。当該技術分野においてよく知られているように、振動突起部262は、対象又は検出装置100´´のユーザの口腔衛生をもたらす。また、近位ボディ部210は、振動シャフト114を動作させるための突起部振動モータ118と、振動シャフト114を動作させるための突起部振動モータ118を活性化するための活性化装置144と、を含んでいてもよい。活性化装置144は、コントローラ225と電気的に連絡している。
或る例示的な実施形態では、コントローラ225は、活性化装置144の活性化前に、遠位先端112,112´を介する第2の流体30の通過を生じさせるため、ポンプ部142に信号を送信する。ここで、動圧における変化は、活性化装置144の活性化前の動圧と比較される。他の例示的な実施形態では、コントローラ225は、活性化装置144の活性化後に、遠位先端112,112´を介する第2の流体30の通過を生じさせるため、ポンプ部142に信号を送信し、コントローラ225は、活性化装置144の非活性化後に、遠位先端112,112´を介する第2の流体30の通過を生じさせ続けるため、ポンプ部142に信号を送信する。ここで、動圧における変化は、活性化装置144の非活性化後の動圧と比較される。
或る例示的な実施形態では、近位ボディ部210は、コントローラ225と電気的に連絡している検出装置使用センサ280を更に含み、活性化装置144の活性化前の時間が、検出装置使用センサ280の活性化によって初期化されるため、コントローラ225によって感知される。例示的な実施形態では、検出装置使用センサ280は、動きセンサ282、又は、接触センサ284、又は、それらの組み合わせである。接触センサ284は、圧力センサ284a、又は、温度センサ284b、又は、それらの組み合わせを含んでいてもよい。
或る例示的な実施形態では、コントローラ225が、検出装置使用センサ280からの信号の受信後の所定の期間において、活性化装置144の活性化がなく、検出装置使用センサ280の活性化を感知した場合、コントローラ225は、遠位先端112,112´を介する第2の流体30の通過を生じさせることの停止をポンプ部142にを通知する。
図25に戻ると、ポンプ部142と近位プローブ部111との間を流体連結するように配置された中央パラメータセンサ部120´aを有する近位ボディ部210aを含む、表面上の物質の存在を検出するためのストリームプローブ又は検出装置他の例示的な実施形態が図示されている。図4C及び図10に図示されたストリームプローブ100´´に対し、中央パラメータセンサ部120´aも、ポンプ部142と近位プローブ部111との間の流体連結を可能にしている。また、パラメータセンサPも、中央パラメータセンサ部120´aと流体連結するように配置されている。
しかしながら、ストリームプローブ又は検出装置100´´aは、流体導管部材402が、中央パラメータセンサ部120´aを具備する近位又は上流ジャンクション402aから近位プローブ部111を具備する遠位又は下流ジャンクション402bまで延在しているパラメータセンサP周囲にフローバイパスを形成するように、近位プローブ部111及び中央パラメータセンサ部120´aと流体連結する流体導管部材402を含む。フロー制御バルブなどの流体フロー妨害装置404が、流体導管部材402に配置され、ポンプ部142の動作中、閉位置となるように維持されている。
コントローラ225が、遠位先端112,112´の開口136を介する流体30の通過を少なくとも部分的に妨害する物質116に相関しているセンサパラメータを表す信号を受信した場合、コントローラ225は、遠位先端112,112´の開口136を介する流体30の通過を少なくとも部分的に妨害する物質116を除去するため、遠位先端112,112´における動圧を増加させるべく、パラメータセンサPをバイパスするよう、少なくとも部分的に開くための信号を流体フロー妨害装置404に送信する。コントローラ225が、中央パラメータセンサ部120´aにおける圧力が遠位先端112,112´が妨害されていない状態であることを示す値に戻ったことを示すパラメータセンサPからの信号を受信した場合、コントローラ225は、少なくとも部分的に閉じるための信号を流体フロー妨害装置404に送信してもよい。
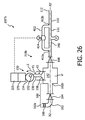
図26は、図4Bを参照して上述されたストリームプローブ100´と同様の方法で、中央パラメータセンサ部を除外し、代わりに、近位プローブ部111と直接的に流体連結しているポンプ部142を有する近位ボディ部210bを含む、表面100´´b上の物質の存在を検出するためのストリームプローブ又は検出装置の他の例示的な実施形態を図示している。
近位ボディ部210bは、近位プローブ部111と流体連結するように配置されたパラメータセンサPを含む。図25を参照して上述されたストリームプローブ100´´aと同様の方法で、流体導管部材412が、流体導管部材412が、近位プローブ部111を具備する近位又は上流ジャンクション412aから近位プローブ部111を具備する遠位又は下流ジャンクション412bまで延在しているパラメータセンサP周囲にフローバイパスを形成するように、近位プローブ部111と流体連結しており、流体フロー妨害装置414が、流体導管部材412に配置されている。流体フロー妨害装置414は、ポンプ部142の使用中、閉位置にある。
コントローラ225が、遠位先端112,112´の開口136を介する流体30の通過を少なくとも部分的に妨害する物質116に相関しているセンサパラメータを表す信号を受信した場合、コントローラ225は、遠位先端112,112´の開口136を介する流体30の通過を少なくとも部分的に妨害する物質116を除去するため、遠位先端112,112´における動圧を変化させるべく、パラメータセンサPをバイパスするよう、少なくとも部分的に開くための信号を流体フロー妨害装置414に送信する。同様に、コントローラ225が、近位プローブ部111における圧力が遠位先端112,112´が妨害されていない状態であることを示す値に戻ったことを示すパラメータセンサPからの信号を受信した場合、コントローラ225は、少なくとも部分的に閉じるための信号を流体フロー妨害装置414に送信してもよい。
図27は、図25のストリームプローブ又は検出装置100´´aと同様の方法で、ポンプ部142と近位プローブ部111との間の流体連結を可能にする中央パラメータセンサ部120´bを有する近位ボディ部210cを含む、表面上の物質の存在を検出するためのストリームプローブ又は検出装置100´´cの他の例示的な実施形態を図示している。また、パラメータセンサPは、中央パラメータセンサ部120´bと流体連結するように配置されている。
近位ボディ部210cは、中央パラメータセンサ部120´bを具備する近位又は上流ジャンクション430aから延在している上流流体導管部材420と、中央パラメータセンサ部120´bを具備する遠位又は下流ジャンクション430bから延在している下流流体導管部材424と、を含む。流体容器422が、中央パラメータセンサ部120´bと流体連結するように、流体容器422が、近位又は上流ジャンクション430aと遠位又は下流ジャンクション430bとの間に配置されている。遠位又は下流流体フロー妨害装置428が、流体容器422の下流、且つ、遠位又は下流流体導管部材424に配置されている。
近位又は上流流体フロー妨害装置426は、流体容器422の上流、且つ、近位又は上流流体導管部材420に配置されていてもよい。第2の流体フロー妨害装置426は、流体連結がパラメータセンサPの上流である中央パラメータセンサ部120´bの一部120´b1とパラメータセンサPの下流である中央パラメータセンサ部120´bの一部120´b2との間に供給されるように、流体容器422の上流に配置され、第2の流体フロー妨害装置426、流体容器422、及び、流体フロー妨害装置428は、パラメータセンサP周囲にフローバイパスを形成する。流体フロー妨害装置428が閉位置にある場合、流体容器422は、パラメータセンサPの下流にある中央パラメータセンサ部120b´2における圧力よりも上の圧力で加圧されてもよい。流体容器422の加圧は、遠位又は下流流体フロー妨害装置424が閉位置である一方、近位又は上流流体フロー妨害装置426を開位置にして、ポンプ部142を動作させることによって、もたらされ得る。流体容器422と流体連結しているパラメータセンサP5によって測定され得る、所望の圧力が流体容器422において一旦生じると、近位又は上流流体フロー妨害装置426は、中央パラメータセンサ部120´bへの圧力又はフローを増加させるための流体容器のための動作要求が生じるまで、流体容器422の加圧を維持するために、閉じられてもよい。また、流体容器422は、当該技術分野における当業者によって知られているように、外部手段(図示省略)により加圧されてもよい。
コントローラ225が、遠位先端112,112´の開口136を介する流体の通過を少なくとも部分的に妨害する物質116に関連しているセンサパラメータを表す信号を受信した場合、コントローラ225は、遠位先端112,112´の開口136を介する流体の通過を少なくとも部分的に妨害する物質116を除去するため、パラメータセンサPをバイパスして、これにより、遠位先端112における動圧を増加させるよう、流体容器422から圧力を解放すべく、少なくとも部分的に開くための信号を、流体フロー妨害装置428に送信する。
検出装置100´´cの使用中、コントローラ225が、少なくとも部分的に開くための信号を流体フロー妨害装置428に送信した後、流体容器422における圧力が減少した場合、コントローラ225は、遠位先端112,112´の開口136を介する流体の通過を少なくとも部分的に妨害する物質116を除去するため、パラメータセンサP周囲のフローをバイパスして、これにより、遠位先端112における動圧を増加させるよう、閉位置から少なくとも部分的に開いた位置に移行するための信号を、第2の流体フロー妨害装置426に送信する。
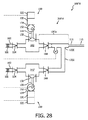
図28は、図4Cを参照して上述された第1のポンプ部142と、ポンプ部142と近位プローブ部111との間を流体連結するよう配置された中央パラメータセンサ部120´aと、を有する近位ボディ部210dを含む、表面上の物質の存在を検出するためのストリームプローブ又は検出装置100´´dの更に他の例示的な実施形態を図示している。前述のとおり、中央パラメータセンサ部120は、ポンプ部142と近位プローブ部111との間の流体連結を可能にする。パラメータセンサPは、中央パラメータセンサ部120と流体連結するように配置される。
さらに、近位ボディ部210dは、パラメータセンサPの下流にある中央パラメータセンサ部120における接続1200を通じて中央パラメータセンサ部120と流体連結しているポンプ排出流体導管部材1202を持つ、第2の、又は、スタンバイポンプ部142´を含む。チェックバルブなどの近位ポンプ部排出流路フロー妨害装置168が、スタンバイポンプ部142´の排出において、ポンプ排出流体導管部材1202に配置されている。
コントローラ225が、遠位先端112,112´の開口136を介する流体の通過を少なくとも部分的に妨害する物質116に関連しているセンサパラメータを表す信号を受信した場合、コントローラ225は、遠位先端112,112´の開口136を介する流体の通過を少なくとも部分的に妨害する物質116を除去するため、動作を初期化して、遠位先端112における動圧を増加させるための信号を、スタンバイポンプ部142´に送信する。
図29は、図4Cを参照して上述された第1のポンプ部142を有する近位ボディ部210eを含む、表面上の物質の存在を検出するためのストリームプローブ又は検出装置100´´eの他の例示的な実施形態図示している。しかしながら、図4Cとは対照的に、ポンプ部142は、ポンプ部142を通じた第2の流体30の吸入を可能にするとともに、ポンプ部142を通じた第3の流体36の吸入を可能にする吸入口162´を有している。吸入口162´は、図示のように、第1の入口162´a及び第2の入口162´bを具備するベース162´´を持つT字接続であってもよい。吸入口162´は、第1の入口162´a及び第2の入口162´bと流体連結するT字出口を形成している栓162´cを更に含む。第1の入口162´aは、ポンプ部142の吸入口上の吸入フロー妨害装置164と流体連結するよう配置されている。このため、吸入フロー妨害装置164との栓又はT字出口162´cの接続は、第1のT字入口162´aにおける周囲環境からの空気とポンプ部142との間の流体連結を可能にする。ここで、吸入口フィルタ166が、第1のT字入口162´aに配置されている。フロー制御バルブなどの吸入口エアフロー妨害装置165が、第1のT字入口162´aを通じた周囲環境からの矢印Aによって示される空気30のフローを制御するために、第1のT字入口162´aの近位又は上流に配置されていてもよい。
近位ボディ部210eは、第2のT字入口162´b、近位ポンプ部142、及び、中央パラメータセンサ部120´を通じて遠位プローブ部110と流体連結している第3の流体供給部材176を更に含んでいてもよい。流体36は、流体ストレージタンク排出部材172及び流体制御バルブを含みうるフロー妨害装置174を介して第3の流体供給部材176と流体連結している流体ストレージタンク170を介して、第3の流体供給部材176を通じ、ポンプ部142に供給される。
従って、動圧における変化は、遠位先端112,112´の開口136を介する流体30の通過を妨害する物質116を除去するために、遠位先端112,112´に第3の流体36の通過を生じさせるよう、ポンプ部142を動作させることを含む。或る例示的な実施形態では、第3の流体は、液体である。他の例示的な実施形態では、当該液体は、洗口液又はアルコールなどの殺菌剤であってもよい。
第3の流体36は、液滴36´であってもよく、ポンプ部142は、遠位先端112,112´への第2の流体30及び液滴の通過を生じさせる、第2の流体30及び液滴を、吸入口152を通じて同時に吸入する。ポンプ部142は、遠位先端112,112´への液滴36´の通過が、遠位先端112,112´の開口を介する第2の流体30の通過を妨害する物質116の除去を生じさせるように、ポンプ部142が、液滴36´に対して、十分な運動エネルギーを供給するよう設計及び動作されてもよい。第3の液体36及び第2の流体30又は液滴36´及び第2の流体30を遠位先端112,112´へ引き込む、ポンプ部142の当該動作中、ストリームプローブ又は検出装置100´´eは、電源270のための充電ステーションとしても機能し得るドッキングステーション180上に格納されてもよい。
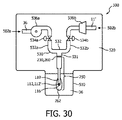
図30は、表面上の物質の存在を検出するためのストリームプローブ又は検出装置の更に他の例示的な実施形態を図示している。ここで、例えば、図4C及び図10を参照すると、遠位口腔挿入部250が、コネクタ230において近位ボディ部210から取り外され、図29を参照して説明された第3の流体36などのラミング流体を含む殺菌流体ストレージ容器又はボウル510を有する検出装置殺菌ユニット500に配置されている。ここで、第3の流体制御6は、液体であり、他の例示的な実施形態では、当該液体は、洗口液又はアルコールなどの殺菌剤であってもよい。
検出装置殺菌ユニット500は、流体36への遠位口腔挿入部250の浸漬が可能となるように、遠位口腔挿入部250が、殺菌流体ストレージ容器又はボウル510に配置されるよう、遠位口腔挿入部250を受ける遠位口腔挿入部マウント部材520を含む。
さらに、マウント部材520は、コネクタ230(図10参照)を介して遠位口腔挿入部250の近位端260に取り外し可能に取り付けられた蛇口又は出口接続531を持つ排気多岐管532を含むT字接続などの複数の接続部材530を受けるように構成される。第1の排気多岐管接続532aは、流体36が、遠位口腔挿入部250の遠位プローブ部110の遠位先端112,112´を通じて射出され得るように構成されている。第1の排気多岐管接続532aは、流体供給ポンプ排出フロー制御バルブ534aを通じて流体36を排出する流体供給ポンプ536aと流体連結している。流体36は、矢印502aで示されるように、流体供給ポンプ536aの吸入口を通じて吸入され、これにより、流体供給ポンプ536aと遠位先端112,112´との間に流体連結を供給している。動圧における変化は、流体供給ポンプ536aが、遠位先端112,112´の開口を介する第2の流体30の通過を妨害する物質116を除去するために、又は、遠位口腔挿入部250を殺菌するために、十分な時間、第3の流体36を射出するように動作されることを含む。
或る例示的な実施形態では、物質116を除去するため、又は、遠位口腔挿入部250を殺菌するため、流体供給ポンプ536aの動作が完了した場合、第2の排気多岐管接続532bが、乾燥流体11´が、遠位口腔挿入部250の遠位プローブ部110の遠位先端112,112´を通じて射出され得るように、構成されている。第2の排気多岐管接続532bは、乾燥流体供給コンプレッサ排出フロー制御バルブ534bを通じて乾燥流体11´を排出する乾燥流体供給コンプレッサ536bと流体連結している。乾燥流体11´は、矢印502bに示されるように、乾燥流体供給コンプレッサ536bの吸入口を通じて吸入され、これにより、乾燥流体供給コンプレッサ536bと遠位先端112,112´との間に流体連結を供給している。乾燥流体供給コンプレッサ536bは、所望の物体を乾燥させるため、又は、遠位口腔挿入部250を更に殺菌するため、十分な期間、動作され得る。或る例示的な実施形態では、乾燥流体11´は、周囲温度の、又は、周囲温度よりも高い温度で加熱された、周囲空気である。また、乾燥流体11´は、二酸化炭素などの気体、又は、エチレンオキシドなどの医療用滅菌気体を含んでいてもよい。
或る例示的な実施形態では、図31は、遠位先端112,112´の開口を介する第2の流体30の通過を妨害する物質116を除去するための更に他の方法の或る例示的な実施形態を図示している。より具体的には、図31では、図4A及び図10を参照して上述されたストリームプローブ100が図示されており、ここで、遠位口腔挿入部250が、殺菌流体ストレージ容器又はボウル510と同様の液体容器510´に浸漬されている。図4Aを参照して前述されたように、近位ボディ部210は、ポンプ部124の動作の少なくとも1つの交互サイクルが、遠位先端112,112´における負圧状態、又は、加圧状態、及び、陽圧状態を生じさせ、これにより、遠位先端112,112´を通じて流体フローを振動させるように、ポンプ部124の動作を制御するコントローラ225を含む。振動している流体フロー及び負圧状態と加圧状態との間の振動は、遠位先端112,112´の開口を介する第2の流体30の通過を妨害し得る物質116を除去するために、又は、遠位口腔挿入部250を殺菌するために、又は、その両方のために、遠位先端112,112´における動圧を変化させる。
図32は、図31のストリームプローブ100のユーザ600を図示している。ここで、負圧状態又は加圧状態は、ユーザ600の口602の中に挿入されるとともに、ユーザ600の口602における液体である液体604に浸漬された遠位口腔挿入部250によって、達成される。より具体的には、液体604は、洗口液であってもよく、殺菌成分又は消毒成分を含んでいてもよい。また、図4Aと関連して、図31を参照して説明されたように、近位ボディ部210は、ポンプ部124の動作の少なくとも1つの交互サイクルが、遠位先端112,112´における負圧状態、又は、加圧状態、及び、陽圧状態を生じさせ、これにより、遠位先端112,112´を通じて流体フローを振動させるように、ポンプ部124の動作を制御するコントローラ225を含む。振動している流体フロー及び負圧状態と加圧状態との間の振動は、遠位先端112,112´の開口を介する第2の流体30の通過を妨害し得る物質116を除去するために、又は、遠位口腔挿入部250を殺菌するために、又は、その両方のために、遠位先端112,112´における動圧を変化させる。
当該技術分野における当業者は、図25乃至図32において説明されるような、図1乃至図24と関連する本開示の様々な実施形態が、個別に、又は、本開示の他の実施形態の1又は複数と組み合わせられて、使用され得ることをを認識し、その方法を理解するであろう。
本開示のいくつかの実施形態を図面に示したが、本開示をこれらに限定することは意図されず、本開示は当該技術分野が許容する範囲の広さを有し、明細書も同様に読まれることが意図される。したがって、上記は限定ではなく、あくまで特定の実施形態の例示として解されるべきである。当業者は、添付の特許請求の範囲に含まれる他の変形例を想像する。
請求項において、括弧内の如何なる参照符号も特許請求の範囲を制限すると解されるべきではない。「含む(又は備える若しくは有する)」との用語は、請求項に列挙される以外の要素又はステップの存在を除外しない。要素は複数を除外しない。本発明は、複数の異なる要素を含むハードウェアによって、及び/又は、適切にプログラミングされたプロセッサによって実現され得る。複数の手段を列挙する装置クレームにおいて、これらの手段のうちのいくつかは、単一のハードウェアアイテムによって具現化され得る。単に特定の手段が互いに異なる独立請求項に記載されているからといって、これらの手段の組み合わせを好適に使用することができないとは限らない。
Claims (15)
- 表面上の物質の存在を検出するための検出装置であって、前記検出装置は、
第1の流体内に浸漬され、第2の流体の通過を可能にする開口を持つ遠位先端を定める遠位プローブ部と、
(i)ポンプ部と、(ii)前記ポンプ部と流体連結する近位プローブ部と、を有し、前記近位プローブ部は、前記近位プローブ部と前記遠位プローブ部との間の流体連結を確立するために、コネクタを介して前記遠位プローブ部に接続されることができ、前記ポンプ部は、前記遠位先端を介する前記第2の流体の通過を生じさせ、これにより、前記遠位先端の前記開口を介する前記第2の流体の通過を少なくとも部分的に妨害する物質に相関する、前記センサパラメータを表す信号の測定に基づいて、前記表面上に存在し得る物質の検出を可能にするための前記遠位プローブ部のセンサパラメータにおける変化を誘起し、更に、(iii)前記センサパラメータを表す前記信号を検出するように構成及び配置されるパラメータセンサと、(iv)コントローラと、を有する、近位ボディ部と、
を有し、
前記コントローラは、前記パラメータセンサによって感知された信号読み取り値を処理するとともに、前記信号読み取り値が、前記遠位先端の前記開口を介する前記第2の流体の通過を妨害する物質を示すかどうかを決定し、前記コントローラは、前記ポンプ部及び前記パラメータセンサと電気的に連絡し、前記コントローラは、前記信号読み取り値が、前記遠位先端の前記開口を介する前記第2の流体の通過を妨害する物質を示すと決定したことに応じて、前記遠位先端における動圧における変化をもたらすために、少なくとも前記ポンプ部に信号を送信し、
前記遠位先端における動圧における変化をもたらすために、少なくとも前記ポンプ部に前記信号を送信することが、
(a)使用中、前記信号読み取り値が、前記遠位先端の前記開口を介する前記第2の流体の通過を妨害する物質を示すと決定する前記コントローラに応じて、前記表面上の物質の存在を検出するために、前記コントローラは、前記遠位先端の前記開口を介する前記第2の流体の通過を妨害する物質を除去すべく、(i)前記パラメータセンサ周囲のフローバイパス、(ii)前記パラメータセンサの下流のスタンバイポンプ部のうちの少なくとも1つにより、動圧における前記変化を生じさせる前記近位ボディ部の動作における変化を生じさせる前記信号を生成する、
(b)非使用中、前記表面上の物質の存在を検出するために、前記近位ボディ部が、振動シャフトを動作させるために、突起部振動モータを活性化するための活性化装置を更に有し、前記コントローラが、前記遠位先端の前記開口を介する前記第2の流体の通過を妨害する物質を除去するため、(i)前記活性化装置の活性化前、及び、(ii)前記活性化装置の非活性化後、の少なくとも1つにおいて、動圧における前記変化を生じさせる前記近位ボディ部の動作における変化を生じさせる信号を送信する、
からなるグループから選択される1又は複数を有する、検出装置。 - 前記コントローラが、前記パラメータセンサによって感知された信号読み取り値を処理するとともに、前記信号読み取り値が、前記遠位先端の開口を介する流体の前記通過を妨害する物質を示すと決定したことに応じて、前記コントローラは、少なくとも前記パラメータセンサ周囲のフローをバイパスすることにより、前記遠位先端の前記開口を介する前記流体の通過を妨害する前記物質を除去するために、排出圧力、又は、フロー圧力、又は、その両方の圧力、並びに、前記遠位先端へのフローを変化させる信号を前記ポンプ部に送信する、請求項1記載の検出装置。
- 前記近位ボディ部が、(v)前記近位プローブ部と流体連結するように配置された前記パラメータセンサと、(vi)前記パラメータセンサ周囲にフローバイパスを形成するように、前記近位プローブ部と流体連結している流体導管部材と、(vii)前記流体導管部材に配置された、前記ポンプ部の動作中は閉位置にある流体フロー妨害装置と、を更に有し、
前記コントローラが、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する物質と相関する前記センサパラメータを表す信号を受信したことに応じて、前記コントローラは、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する前記物質を除去するために、前記遠位先端における動圧を変化させるべく、前記パラメータセンサをバイパスするよう、少なくとも部分的に開くための信号を、前記流体フロー妨害装置に送信する、請求項1記載の検出装置。 - 前記近位ボディ部が、(v)前記ポンプ部と前記近位プローブ部との間を流体連結するように配置され、前記ポンプ部と前記近位プローブ部との間の流体連結を可能にする中央パラメータセンサ部と、(vi)前記中央パラメータセンサ部と流体連結するように配置された前記パラメータセンサと、(vii)前記パラメータセンサ周囲にフローバイパスを形成するように、前記近位プローブ部と前記中央パラメータセンサ部とを流体連結する流体導管部材と、(viii)前記流体導管部材に配置された、前記ポンプ部の動作中は閉位置にある流体フロー妨害装置と、を更に有し、
前記コントローラが、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する物質と相関する前記センサパラメータを表す信号を受信したことに応じて、前記コントローラは、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する前記物質を除去するために、前記遠位先端における動圧を変化させるべく、前記パラメータセンサをバイパスするよう、少なくとも部分的に開くための信号を、前記流体フロー妨害装置に送信する、請求項1記載の検出装置。 - 前記流体導管部材が、前記流体フロー妨害装置の上流に配置されるとともに、前記中央パラメータセンサ部と流体連結している流体容器を更に有し、
前記流体容器が、前記流体フロー妨害装置が閉位置にある場合に、前記パラメータセンサの下流の前記中央パラメータセンサ部における圧力よりも上の圧力で加圧される、請求項4記載の検出装置。 - 前記コントローラが、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する物質と相関する前記センサパラメータを表す信号を受信したことに応じて、前記コントローラは、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する前記物質を除去するために、前記パラメータセンサをバイパスすべく、前記流体容器から圧力を解放して、前記遠位先端における動圧を増加させるよう、少なくとも部分的に開くための信号を、前記流体フロー妨害装置に送信する、請求項5記載の検出装置。
- 前記パラメータセンサの上流にある前記中央パラメータセンサ部の一部と前記パラメータセンサの下流にある前記中央パラメータセンサ部の一部との間に流体連結が供給されるよう、前記流体容器の上流に配置された第2の流体フロー妨害装置を更に有し、前記第2の流体フロー妨害装置、前記流体容器、及び、前記流体フロー妨害装置が、前記パラメータセンサ周囲にフローバイパスを形成する、請求項6記載の検出装置。
- 前記検出装置の使用中、前記コントローラが、少なくとも部分的に開くための信号を前記流体フロー妨害装置に送信後、前記流体容器における圧力の減少に応じて、前記コントローラは、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する物質を除去するために、前記パラメータセンサ周囲のフローをバイパスすべく、閉位置から少なくとも部分的に開いた位置に移行させて、前記遠位先端における動圧を増加させるための信号を、前記第2の流体フロー妨害装置に送信する、請求項7記載の検出装置。
- 前記近位ボディ部が、
(v)前記ポンプ部と前記近位プローブ部との間を流体連結するように配置され、前記ポンプ部と前記近位プローブ部との間の流体連結を可能にする中央パラメータセンサ部と、
(vi)前記中央パラメータセンサ部と流体連結するように配置された前記パラメータセンサと、
(vii)前記パラメータセンサの下流の前記中央パラメータセンサ部における接続を通じて前記中央パラメータセンサ部と流体連結したポンプ排出流体導管部材を持つスタンバイポンプ部と、
を更に有し、
前記コントローラが、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する物質と相関する前記センサパラメータを表す信号を受信したことに応じて、前記コントローラは、前記遠位先端の前記開口を介する流体の前記通過を少なくとも部分的に妨害する前記物質を除去するために、動作を初期化して、前記遠位先端における動圧を増加させる信号を、前記スタンバイポンプ部に送信する、請求項1記載の検出装置。 - 非使用中、前記近位ボディ部の動作における前記変化が、前記遠位先端の将来の妨害が発生する可能性を最小化するために必要な期間、又は、前記遠位先端の前記開口を介する流体の前記通過を妨害する物質を除去するために必要な期間における、前記ポンプ部の前記遠位プローブ部を通じた流体のポンピングによって、もたらされる、請求項1記載の検出装置。
- 前記検出装置の遠位口腔挿入部上に配置された、対象又は前記検出装置のユーザの口腔衛生をもたらすための振動突起部のための前記振動シャフトと、
前記振動シャフトを動作させるための前記突起部振動モータと、
前記振動シャフトを動作させるために、前記突起部振動モータを活性化させるための、前記コントローラと電気的に連絡する前記活性化装置と、
を更に有し、
前記コントローラが、前記活性化装置の活性化前に、前記遠位先端を介する前記第2の流体の通過を生じさせるための信号を前記ポンプ部に送信し、動圧における前記変化は、前記活性化装置の活性化前の動圧と比較される、又は、
前記コントローラが、前記活性化装置の活性化後に、前記遠位先端を介する前記第2の流体の通過を生じさせるための信号を前記ポンプ部に送信し、前記コントローラが、前記活性化装置の非活性化後に、前記遠位先端を介する前記第2の流体の通過を生じさせ続けるための信号を前記ポンプ部に送信し、動圧における前記変化は、前記活性化装置の非活性化後の動圧と比較される、請求項1記載の検出装置。 - 前記近位ボディ部が、前記コントローラと電気的に連絡する検出装置使用センサを更に有し、
前記活性化装置の活性化前の時間が、前記検出装置使用センサの活性化によって初期化されるため、前記コントローラによって感知される、請求項10記載の検出装置。 - 前記検出装置使用センサが、動きセンサ又は接触センサ又はそれらの組み合わせであり、前記接触センサが、圧力センサ又は温度センサ又はそれらの組み合わせを含む、請求項12記載の検出装置。
- 前記コントローラが、前記検出装置の使用を示す前記検出装置使用センサからの信号の受信後の所定の期間において、前記活性化装置の活性化がなく、前記検出装置使用センサの活性化を感知したことに応じて、前記コントローラは、前記遠位先端を介する前記第2の流体の通過の発生を停止することを前記ポンプ部に通知する、請求項12記載の検出装置。
- 前記ポンプ部が、前記ポンプ部を介する前記第2の流体の吸入を可能にするとともに、前記ポンプ部を介する第3の流体の吸入を可能にする吸入口を更に有し、
動圧における変化をもたらすことが、前記遠位先端の前記開口を介する流体の前記通過を妨害する物質を除去するために、前記遠位先端への前記第3の流体の通過を生じさせる前記ポンプ部を更に含む、請求項1記載の検出装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14153279.6 | 2014-01-30 | ||
| EP14153279 | 2014-01-30 | ||
| PCT/EP2015/051042 WO2015113872A1 (en) | 2014-01-30 | 2015-01-21 | Reducing blockages of a plaque detection stream probe |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017506525A true JP2017506525A (ja) | 2017-03-09 |
| JP2017506525A5 JP2017506525A5 (ja) | 2017-12-21 |
Family
ID=50028882
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016538109A Withdrawn JP2017506525A (ja) | 2014-01-30 | 2015-01-21 | 歯垢検出ストリームプローブの阻害を低減する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20160338635A1 (ja) |
| EP (1) | EP3099220A1 (ja) |
| JP (1) | JP2017506525A (ja) |
| CN (1) | CN105979857A (ja) |
| WO (1) | WO2015113872A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018153383A (ja) * | 2017-03-17 | 2018-10-04 | シチズン時計株式会社 | 歯垢検査装置 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2915502B1 (de) * | 2014-03-06 | 2019-11-20 | W & H Dentalwerk Bürmoos GmbH | Medizinisches, insbesondere zahnärztliches, System |
| WO2016051301A1 (en) * | 2014-09-29 | 2016-04-07 | Koninklijke Philips N.V. | Liquid droplet approach to clearing blockage of a plaque detection stream probe |
| US9913530B2 (en) * | 2015-05-19 | 2018-03-13 | Hongzhao Ye | Smart toothbrush |
| US10258142B2 (en) * | 2015-11-16 | 2019-04-16 | International Business Machines Corporation | Toothbrush with sensors |
| GB2555621B (en) | 2016-11-04 | 2018-12-12 | Dyson Technology Ltd | Dental Cleaning Appliance |
| US10835028B2 (en) | 2016-11-14 | 2020-11-17 | Colgate-Palmolive Company | Oral care system and method |
| US11043141B2 (en) | 2016-11-14 | 2021-06-22 | Colgate-Palmolive Company | Oral care system and method |
| US11361672B2 (en) | 2016-11-14 | 2022-06-14 | Colgate-Palmolive Company | Oral care system and method |
| US10582764B2 (en) | 2016-11-14 | 2020-03-10 | Colgate-Palmolive Company | Oral care system and method |
| US11213120B2 (en) | 2016-11-14 | 2022-01-04 | Colgate-Palmolive Company | Oral care system and method |
| WO2018104190A1 (en) * | 2016-12-07 | 2018-06-14 | Koninklijke Philips N.V. | Method and apparatus for protection of soft tissues against a teeth whitening substance |
| WO2021167486A1 (ru) * | 2020-02-20 | 2021-08-26 | Андрей Валентинович АЛЕКСАНДРОВ | Насадка для отсасывания слюны |
| RU198432U1 (ru) * | 2020-02-20 | 2020-07-08 | Общество с ограниченной ответственностью «ОландМед» | Насадка для отсасывания слюны |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9816914D0 (en) * | 1998-08-05 | 1998-09-30 | Smithkline Beecham Gmbh | Novel device |
| US6283719B1 (en) * | 1998-11-05 | 2001-09-04 | Frantz Medical Development Ltd | Detecting obstructions in enteral/parenteral feeding tubes and automatic removal of clogs therefrom |
| US6485465B2 (en) * | 2000-03-29 | 2002-11-26 | Medtronic Minimed, Inc. | Methods, apparatuses, and uses for infusion pump fluid pressure and force detection |
| CA2341105A1 (en) * | 2001-03-21 | 2002-09-21 | Unknown | System and method for detection and removal of dental tartar, e.g. subgingival tartar |
| US7818053B2 (en) * | 2003-02-21 | 2010-10-19 | Dtherapeutics, Llc | Devices, systems and methods for plaque type determination |
| US20060014118A1 (en) * | 2004-06-08 | 2006-01-19 | Utama John J | Dental hygiene accessory |
| JP2008055123A (ja) * | 2006-08-31 | 2008-03-13 | Narutoya:Kk | 歯ブラシ |
| US8652086B2 (en) * | 2006-09-08 | 2014-02-18 | Abbott Medical Optics Inc. | Systems and methods for power and flow rate control |
| WO2010108189A1 (en) * | 2009-03-20 | 2010-09-23 | Water Pik, Inc. | Oral irrigator appliance with radiant energy delivery for bactericidal effect |
| US8608699B2 (en) * | 2009-03-31 | 2013-12-17 | Tandem Diabetes Care, Inc. | Systems and methods to address air, leaks and occlusions in an insulin pump system |
| WO2011075535A1 (en) * | 2009-12-15 | 2011-06-23 | Massachusetts Institute Of Technology | Plaque removal and differentiation of tooth and gum |
| US8702422B2 (en) * | 2010-06-29 | 2014-04-22 | Mcneil-Ppc, Inc. | Device and method for cleaning the oral cavity |
| US20120189976A1 (en) * | 2011-01-25 | 2012-07-26 | Mcdonough Justin E | Oral care devices and systems |
| JP5796408B2 (ja) * | 2011-08-24 | 2015-10-21 | オムロンヘルスケア株式会社 | 口腔ケア装置 |
| US9220583B2 (en) * | 2013-10-22 | 2015-12-29 | Plaqless Ltd | Dental care device for detection and removal of plaque |
-
2015
- 2015-01-21 CN CN201580006840.1A patent/CN105979857A/zh active Pending
- 2015-01-21 JP JP2016538109A patent/JP2017506525A/ja not_active Withdrawn
- 2015-01-21 US US15/114,558 patent/US20160338635A1/en not_active Abandoned
- 2015-01-21 WO PCT/EP2015/051042 patent/WO2015113872A1/en not_active Ceased
- 2015-01-21 EP EP15702406.8A patent/EP3099220A1/en not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018153383A (ja) * | 2017-03-17 | 2018-10-04 | シチズン時計株式会社 | 歯垢検査装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3099220A1 (en) | 2016-12-07 |
| US20160338635A1 (en) | 2016-11-24 |
| CN105979857A (zh) | 2016-09-28 |
| WO2015113872A1 (en) | 2015-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6345691B2 (ja) | ストリームプローブを用いた歯肉検出 | |
| JP2017506525A (ja) | 歯垢検出ストリームプローブの阻害を低減する方法 | |
| JP2016512598A (ja) | 流体流プローブを用いるプラーク検出 | |
| US9918814B2 (en) | Plaque detection using a stream probe |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171113 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20180307 |