JP2019135191A - 果菜自動箱詰め排出方法、果菜収容箱自動積み重ね排出方法、果菜自動箱詰め排出装置、果菜収容箱自動積み重ね排出装置 - Google Patents
果菜自動箱詰め排出方法、果菜収容箱自動積み重ね排出方法、果菜自動箱詰め排出装置、果菜収容箱自動積み重ね排出装置 Download PDFInfo
- Publication number
- JP2019135191A JP2019135191A JP2018229874A JP2018229874A JP2019135191A JP 2019135191 A JP2019135191 A JP 2019135191A JP 2018229874 A JP2018229874 A JP 2018229874A JP 2018229874 A JP2018229874 A JP 2018229874A JP 2019135191 A JP2019135191 A JP 2019135191A
- Authority
- JP
- Japan
- Prior art keywords
- fruit
- vegetable
- vegetable storage
- storage box
- box
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Stacking Of Articles And Auxiliary Devices (AREA)
- Chain Conveyers (AREA)
- Intermediate Stations On Conveyors (AREA)
Abstract
Description
本発明の果菜自動箱詰め排出方法は、果菜収容箱に所定数又は所定重量の果菜を収容し、当該果菜収容済みの果菜収容箱を振動させて当該果菜収容箱内の果菜を箱内分散させ、箱内分散させた果菜収容箱を複数段積み重ね、積み重ねられた複数段の果菜収容箱を排出体に送り出す方法である。本願における排出体には、後述する排出コンベア、待機コンベア、引継ぎ体などが含まれる。
本発明の果菜収容箱自動積み重ね排出方法は、箱内分散させた果菜収容箱が載置された昇降式の受け台を降下させ、降下させた受け台上の果菜収容箱の上に箱内分散させた他の果菜収容箱を積み重ね、受け台の降下と果菜収容箱の積み重ねを所定段の果菜収容箱が積み重ねられるまで繰り返し、所定段数の果菜収容箱が積み重ねられた受け台を前記排出体と同じ又は略同じ高さまで上昇させ、積み重ねられた果菜収容箱を前記排出体に水平又は略水平に排出する方法である。
本発明の果菜自動箱詰め排出装置は、果菜供給体と移送体と排出体を備えている。果菜供給体は果菜収容箱に果菜を供給できる位置に、排出体は積み重ねられた果菜収容箱を引き受けられる位置に設けられている。移送体は果菜を箱内分散させる振動手段と果菜収容箱を複数段積み重ねる積み重ね手段を備えている。
本発明の果菜収容箱自動積み重ね排出装置は、受け台及び昇降手段を備えている。受け台は昇降手段によって昇降可能であり、所定段数の果菜収容箱が積み重ねられるまでは段階的に降下し、所定段数の果菜収容箱が積み重ねられると排出体と同じ又は略同じ高さまで上昇するようにしてある。上昇した受け台上の果菜収容箱は移送体によって前記排出体に送り出される。
本発明の果菜自動箱詰め排出方法及び果菜自動箱詰め排出装置によれば、空箱のセット、果菜の箱詰め、果菜収容済みの果菜収容箱の積み重ね及び積み重ねた果菜収容箱の排出を一台の装置で行うことができるため、少ない作業員でも効率よく行うことができる。また、本発明の果菜自動箱詰め排出装置は、従来、複数の装置で行っていた作業を一台の装置でできるようにしたため、複数の装置を設置する場合よりも設置スペースを取らず、スペースが限られている現場にも設置しやすい。
本発明の果菜収容箱自動積み重ね排出方法及び果菜収容箱自動積み重ね排出装置によれば、これまで人手で行っていた果菜収容箱の積み重ね及び積み重ねた果菜収容箱の排出を自動で行うことができるため、作業者の作業負担を軽減でき、作業効率の向上を図ることができる。
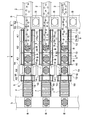
本発明の実施形態の一例を、図面を参照して説明する。本発明の果菜自動箱詰め排出装置1は、図1のように、搬送中の果菜の等階級を判別して選別する果菜自動選別装置2と、箱詰めされた果菜を出荷ヤード等に搬送する排出コンベア3の間(近傍)に配置して使用するものである。果菜自動選別装置2には本件出願人が開発した各種果菜自動選別装置等を、排出コンベア3には既存のローラコンベア等を用いることができる。
前記実施形態1の積み重ね手段は、果菜収容箱Bを降下させながら複数段に積み重ねるものであるが、積み重ね手段は、果菜収容箱Bを上昇させながら複数段に積み重ねるものを用いることもできる。例えば、実施形態1の支持体14、受け台15、位置決めローラ16及び昇降手段17に代えて、果菜収容箱Bを載置する載置台19、果菜収容箱Bを持ち上げる持上げ手段20、及び持ち上げられた果菜収容箱Bを保持する箱保持手段21を積み重ねエリアA4に設けて、これらによって果菜収容箱Bを上昇させながら複数段に積み重ねるようにすることができる(図9(a)〜(f)及び図10(a)〜(c)参照)。
箱詰めをする機構や果菜収容箱Bを振動させて果菜を箱内分散させる機構、果菜収容箱Bを積み重ねる機構等は、それぞれ独立した装置として実施することもできる。また、これらの機構は適宜省略することができる。例えば、果菜収容箱Bを振動させて箱内分散させる機構を省略し、箱詰めされた果菜収容箱Bを支持体14に直接移載する構成を採用することもできる。
前記実施形態1の果菜自動箱詰め排出方法及び果菜自動箱詰め排出装置並びに果菜収容箱自動積み重ね排出方法及び果菜収容箱自動積み重ね排出装置の動作について、図5〜図8を参照して説明する。ここでは、果菜収容箱Bを三段積み重ねて排出する場合を一例として説明する。
(2)一つ目の果菜収容箱B1が受け台15の回転ローラ15b上に移載されると、昇降手段17によって受け台15が果菜収容箱B一つ分降下する(図5(c))。
(3)昇降手段17によって受け台15が果菜収容箱B一つ分降下すると、支持体14が内側にスライドして元の位置に復帰する(図5(d))。
(4)元の位置に復帰した支持体14上に二つ目の果菜収容箱B2が移載されると、支持体14が外側にスライドし(図6(a))、支持体14上の二つ目の果菜収容箱B2が受け台15上の一つ目の果菜収容箱B1上に積み重ねられる(図6(b))。このとき、一つ目の果菜収容箱B1の位置決め突起が二つ目の果菜収容箱B2の位置決め凹部に収まり、二つの果菜収容箱B2がずれないように位置決めされる。
(5)二つ目の果菜収容箱B2が一つ目の果菜収容箱B1の上に移載されると、昇降手段17によって受け台15が果菜収容箱B一つ分降下する(図6(c))。
(6)昇降手段17によって受け台15が果菜収容箱B一つ分降下すると、支持体14が内側にスライドして元の位置に復帰する(図6(d))。
(7)元の位置に復帰した支持体14上に三つ目の果菜収容箱B3が移載されると、支持体14が外側にスライドし(図7(a))、支持体14上の三つ目の果菜収容箱B3の上に積み重ねられる(図7(b))。このとき、前記(4)と同様、二つ目の果菜収容箱B2の位置決め突起が三つ目の果菜収容箱B3の位置決め凹部に収まり、三つ目の果菜収容箱B3がずれないように位置決めされる。
(8)果菜収容箱Bが所定段(この実施形態では三段)積み重ねられると、それら果菜収容箱Bを排出コンベア3に水平又は略水平に送り出せる高さまで受け台15が上昇する(図7(c)、図8(a))。
(9)昇降手段17によって受け台15が所定位置まで上昇すると、駆動モータMによってチェーン9が回転し、そのチェーン9に設けられた箱押し具10によって、三段に積み重ねられた果菜収容箱Bが押されて引継ぎエリアA5の引継ぎ体18に送り出される。
前記実施形態2の果菜自動箱詰め排出方法及び果菜自動箱詰め排出装置並びに果菜収容箱自動積み重ね排出方法及び果菜収容箱自動積み重ね排出装置の動作について、図9(a)〜(f)及び図10(a)〜(c)を参照して説明する。ここでは、果菜収容箱Bを三段積み重ねて排出する場合を一例として説明する。
(2)一つ目の果菜収容箱B1の底面側に持上げ手段20が係止され、その一つ目の果菜収容箱B1が持上げ手段20によって上方に持上げられる(図9(b))。
(3)上方に持上げられた一つ目の果菜収容箱B1の両側面が、箱保持手段21によって保持される(図9(c))。
(4)一つ目の果菜収容箱B1が箱保持手段21で保持されたのち、持上げ手段20が降下する(図9(d))。
(5)二つ目の果菜収容箱B2への箱詰めが完了すると、その二つ目の果菜収容箱B2の側方に持上げ手段20が配置される(図9(e))。
(6)二つ目の果菜収容箱B2の底面側に持上げ手段20が係止され、その二つ目の果菜収容箱B2が持上げ手段20によって上方に持上げられる(図9(f))。
(7)二つ目の果菜収容箱B2が所定位置まで持上げられると、一つ目の果菜収容箱B1を保持している箱保持手段21が外側に移動して一つ目の果菜収容箱B1の保持が解除され、その一つ目の果菜収容箱B1が二つ目の果菜収容箱B2上に移載される(図10(a))。
(8)三つ目の果菜収容箱B3への箱詰めが完了すると、持上げ手段20が二つ目の果菜収容箱B2の底面側から外れる位置まで外側に移動して持上げ手段20による保持が解除され(図10(b))、一つ目の果菜収容箱B1及び二つ目の果菜収容箱B2が三つ目の果菜収容箱B3上に移載される(図10(c))。
(9)三段に積み重ねられた果菜収容箱Bは、チェーン9(図1〜図3)に設けられた箱押し具10によって、引継ぎエリアA5の引継ぎ体18に送り出される。
2 果菜自動選別装置
3 排出コンベア
4 移送体
5 空箱搬送体
6 果菜供給コンベア
6a 幅広コンベア
6b 幅狭コンベア
7 待機コンベア
8 スプロケット
9 チェーン
10 箱押し具
11 第一載せ板
12 第二載せ板
13 第三載せ板
14 支持体
15 受け台
15a フレーム
15b 回転ローラ
16 位置決めローラ
17 昇降手段
18 引継ぎ体
19 載置台
20 持上げ手段
21 箱保持手段
A1 空箱待機エリア
A2 箱詰めエリア
A3 振動エリア
A4 積み重ねエリア
A5 引継ぎエリア
B 果菜収容箱
B1 一つ目の果菜収容箱
B2 二つ目の果菜収容箱
B3 三つ目の果菜収容箱
G ギヤボックス
M 駆動モータ
Claims (9)
- 所定数又は所定重量の果菜を果菜収容箱に収容し、果菜が収容された当該果菜収容箱を複数段積み重ねて排出体に排出する果菜自動箱詰め排出方法において、
果菜収容箱に所定数又は所定重量の果菜を収容し、
前記果菜収容箱を振動させて当該果菜収容箱内の果菜を箱内分散させ、
前記箱内分散させた果菜収容箱を複数段積み重ね、
前記積み重ねられた複数段の果菜収容箱を前記排出体に送り出す、
ことを特徴とする果菜自動箱詰め排出方法。 - 請求項1記載の果菜自動箱詰め排出方法において、
箱内分散させた果菜収容箱を昇降式の受け台に送り出し、
前記果菜収容箱が送り込まれた受け台を降下させ、
前記降下させた受け台上の果菜収容箱の上に箱内分散させた他の果菜収容箱を積み重ね、
前記受け台の降下と果菜収容箱の積み重ねを所定段の果菜収容箱が積み重ねられるまで繰り返す、
ことを特徴とする果菜自動箱詰め排出方法。 - 請求項2記載の果菜自動箱詰め排出方法において、
所定段数の果菜収容箱が積み重ねられた受け台を排出体と同じ又は略同じ高さまで上昇させ、
前記積み重ねられた果菜収容箱を受け台から排出体に水平又は略水平に排出する、
ことを特徴とする果菜自動箱詰め排出方法。 - 果菜収容箱を積み重ねて排出体に排出する果菜収容箱自動積み重ね排出方法において、
箱内分散させた果菜収容箱が載置された昇降式の受け台を降下させ、
前記降下させた受け台上の果菜収容箱の上に箱内分散させた他の果菜収容箱を積み重ね、
前記受け台の降下と果菜収容箱の積み重ねを所定段の果菜収容箱が積み重ねられるまで繰り返し、
所定段数の果菜収容箱が積み重ねられた受け台を前記排出体と同じ又は略同じ高さまで上昇させ、
前記積み重ねられた果菜収容箱を前記排出体に水平又は略水平に排出する、
ことを特徴とする果菜収容箱自動積み重ね排出方法。 - 果菜収容箱を積み重ねて排出体に排出する果菜収容箱自動積み重ね排出方法において、
箱内分散させた載置台上の果菜収容箱を持上げ手段で上方に持ち上げ、
前記持ち上げられた果菜収容箱を箱保持手段で保持し、
前記箱保持手段で保持された果菜収容箱の下に箱内分散された他の果菜収容箱を積み重ね、
前記持上げ手段での果菜収容箱の持ち上げと、箱保持手段での果菜収容箱の保持と、果菜収容箱の積み重ねを所望回数行うことによって、果菜収容箱を複数段に積み重ね、
前記積み重ねられた果菜収容箱を前記排出体に水平又は略水平に排出する、
ことを特徴とする果菜収容箱自動積み重ね排出方法。 - 所定数又は所定重量の果菜を果菜収容箱に収容し、果菜が収容された当該果菜収容箱を複数段積み重ねて排出体に排出する果菜自動箱詰め排出装置において、
果菜収容箱に果菜を供給する果菜供給体と果菜収容箱を移送する移送体と積み重ねられた果菜収容箱を排出する排出体を備え、
前記果菜供給体は移送体上の果菜収容箱に果菜を供給できる位置に設けられ、
前記排出体は移送体から排出される積み重ねられた果菜収容箱を引き受けられる位置に設けられ、
前記移送体は果菜収容箱を振動させて果菜を箱内分散させる振動手段と果菜収容箱を複数段積み重ねる積み重ね手段を備え、
前記移送体は果菜収容箱を振動手段−積み重ね手段−排出体の順に移送することができる、
ことを特徴とする果菜自動箱詰め排出装置。 - 請求項6記載の果菜自動箱詰め排出装置において、
積み重ね手段は昇降式の受け台を備え、
前記受け台は当該受け台上又は当該受け台上の果菜収容箱上に他の果菜収容箱が供給されるたびに所定高さ分降下する、
ことを特徴とする果菜自動箱詰め排出装置。 - 請求項7記載の果菜自動箱詰め排出装置において、
受け台は所定段数の果菜収容箱が積み重ねられると排出体と同じ又は略同じ高さまで上昇可能であり、
移送体は上昇した受け台上の果菜収容箱を排出体に水平又は略水平に送り出すことができる、
ことを特徴とする果菜自動箱詰め排出装置。 - 請求項6記載の果菜自動箱詰め排出装置において、
箱内分散させた果菜収容箱を載置する載置台と、当該載置台上の果菜収容箱を上方に持ち上げる持上げ手段と、当該持ち上げられた果菜収容箱を保持する箱保持手段を備え、
前記持上げ手段は、載置台上の果菜収容箱を持ち上げることができ、
前記箱保持手段は、前記持上げ手段で持ち上げられた果菜収容箱を保持可能であり、
前記持上げ手段は、所定段数の果菜収容箱が積み重ねられると、排出体と同じ又は略同じ高さまで降下可能であり、
移送体は降下した果菜収容箱を排出体に水平又は略水平に送り出すことができる、
ことを特徴とする果菜収容箱自動積み重ね排出装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018018593 | 2018-02-05 | ||
| JP2018018593 | 2018-02-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019135191A true JP2019135191A (ja) | 2019-08-15 |
| JP7294628B2 JP7294628B2 (ja) | 2023-06-20 |
Family
ID=67623661
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018229874A Active JP7294628B2 (ja) | 2018-02-05 | 2018-12-07 | 果菜自動箱詰め排出方法、果菜収容箱自動積み重ね排出方法、果菜自動箱詰め排出装置、果菜収容箱自動積み重ね排出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7294628B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022052344A (ja) * | 2020-09-23 | 2022-04-04 | オリオン機械工業株式会社 | 集積装置 |
| JP2023045053A (ja) * | 2021-09-21 | 2023-04-03 | 東芝産業機器システム株式会社 | ワークの数量検査システム |
| JP2024035028A (ja) * | 2022-09-01 | 2024-03-13 | 株式会社エフ・シー・シー | 遠心クラッチ組付け装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6333221A (ja) * | 1986-07-28 | 1988-02-12 | 株式会社マキ製作所 | 果実の箱詰め装置 |
| JPH0419525U (ja) * | 1990-06-07 | 1992-02-19 | ||
| US5290141A (en) * | 1992-11-06 | 1994-03-01 | Brenton Engineering Inc. | Continuous down stacker apparatus |
| JP2000233831A (ja) * | 1999-02-15 | 2000-08-29 | Rengo Co Ltd | 積み重ねシートの段積装置 |
| JP2001114225A (ja) * | 1999-10-14 | 2001-04-24 | Ishii Ind Co Ltd | 収容状態修正装置 |
-
2018
- 2018-12-07 JP JP2018229874A patent/JP7294628B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6333221A (ja) * | 1986-07-28 | 1988-02-12 | 株式会社マキ製作所 | 果実の箱詰め装置 |
| JPH0419525U (ja) * | 1990-06-07 | 1992-02-19 | ||
| US5290141A (en) * | 1992-11-06 | 1994-03-01 | Brenton Engineering Inc. | Continuous down stacker apparatus |
| JP2000233831A (ja) * | 1999-02-15 | 2000-08-29 | Rengo Co Ltd | 積み重ねシートの段積装置 |
| JP2001114225A (ja) * | 1999-10-14 | 2001-04-24 | Ishii Ind Co Ltd | 収容状態修正装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022052344A (ja) * | 2020-09-23 | 2022-04-04 | オリオン機械工業株式会社 | 集積装置 |
| JP7313014B2 (ja) | 2020-09-23 | 2023-07-24 | オリオン機械工業株式会社 | 集積装置 |
| JP2023045053A (ja) * | 2021-09-21 | 2023-04-03 | 東芝産業機器システム株式会社 | ワークの数量検査システム |
| JP7828732B2 (ja) | 2021-09-21 | 2026-03-12 | 東芝産業機器システム株式会社 | ワークの数量検査システム |
| JP2024035028A (ja) * | 2022-09-01 | 2024-03-13 | 株式会社エフ・シー・シー | 遠心クラッチ組付け装置 |
| JP2024035027A (ja) * | 2022-09-01 | 2024-03-13 | 株式会社エフ・シー・シー | 遠心クラッチ組付け装置 |
| JP7528283B2 (ja) | 2022-09-01 | 2024-08-05 | 株式会社エフ・シー・シー | 遠心クラッチ組付け装置 |
| JP7528284B2 (ja) | 2022-09-01 | 2024-08-05 | 株式会社エフ・シー・シー | 遠心クラッチ組付け装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7294628B2 (ja) | 2023-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109071113B (zh) | 具有头顶车辆和调试站的储存系统 | |
| US7484343B2 (en) | Application of loading ledges | |
| EP3334658B1 (en) | Food conveyor and packaging systems and methods | |
| JP2019135191A (ja) | 果菜自動箱詰め排出方法、果菜収容箱自動積み重ね排出方法、果菜自動箱詰め排出装置、果菜収容箱自動積み重ね排出装置 | |
| CN111846782A (zh) | 送料装置 | |
| JP2020171222A (ja) | 育苗容器積み上げ取出方法および育苗容器積み上げ取出装置 | |
| JP4363787B2 (ja) | 農産物の計量箱詰装置 | |
| CN113926730B (zh) | 一种用于搬运装箱码垛产线的转运装置 | |
| KR101635995B1 (ko) | 자동 적재 장치 | |
| CN107628323A (zh) | 一种纸箱的自动包装入库生产线 | |
| JPH0881056A (ja) | パレタイザー | |
| CN218198993U (zh) | 预灌封自动装盒设备 | |
| JP2577768Y2 (ja) | 物品供給装置 | |
| JP2008068875A (ja) | 農産物の包装装置 | |
| JP2021042060A (ja) | 搬送装置 | |
| JP3732949B2 (ja) | 書籍等の取出装置 | |
| JPH08301221A (ja) | 長尺物箱詰め装置 | |
| JP2022097231A (ja) | 段ばらし装置における積み荷の横移動搬送機構 | |
| JP2020097484A (ja) | 果菜箱詰方法、包装箱積重ね方法、包装箱排出方法、果菜箱詰装置、包装箱積重ね装置、包装箱排出装置 | |
| CN223341028U (zh) | 一种自动加底托装箱机 | |
| CN222808402U (zh) | 一种包装箱翻转机构和叠片打包装置 | |
| CN220096785U (zh) | 一种圆柱电池包装机 | |
| JP4269222B2 (ja) | トレイ搬送システム | |
| CN219448269U (zh) | 一种实现饲料托盘输送过程中360度旋转的顶升平移机 | |
| CN216583018U (zh) | 一种基于高适配性机械手的自动垛码机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211028 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220927 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20221125 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230516 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230601 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7294628 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |