次に、添付図面を参照して本発明の実施形態について詳細に説明する。最初に、図1〜図3を参照して、本発明に係る搬送物の判定装置の実施形態を含む搬送システムの全体構成について説明する。
搬送装置10は、螺旋状の搬送路111を有するボウル型の搬送体110を備えたパーツフィーダ11と、このパーツフィーダ11の上記搬送路111の出口から搬送物を受け取るように構成された入口を備えた直線状の搬送路121を有する搬送体120を備えたリニアフィーダ12とを具備する振動式搬送装置である。この搬送装置10は、本実施形態の搬送物の判定装置を含む搬送物判定制御システム(以下、「制御システム」という。)によって制御される。上記搬送装置10と制御システムを合わせた全体を、以下、搬送システムという。上記制御システムでは、リニアフィーダ12の搬送体120の搬送路121上の搬送物Pを撮影画像GPXに基づいて検査し、判定する。なお、本発明において、振動式搬送装置に限られない構成については、搬送物Pが搬送路に沿って搬送される各種の搬送装置に用いることができる。また、振動式搬送装置であっても、上記パーツフィーダ11とリニアフィーダ12の組み合せに限定されるものではなく、循環式パーツフィーダなどの他の形式の搬送装置に用いることが可能である。さらに、上記の組み合せにあっても、リニアフィーダ12の搬送路121上の搬送物Pを検査するものに限らず、パーツフィーダ11の搬送路111上の搬送物Pを検査するものであっても構わない。
パーツフィーダ11はコントローラCL11によって駆動、制御される。また、リニアフィーダ12はコントローラCL12によって駆動、制御される。これらのコントローラCL11、CL12はパーツフィーダ11やリニアフィーダ12の加振手段(電磁駆動体や圧電駆動体などを含む。)を交流駆動し、搬送体110,120を搬送路111,121上の搬送物Pが所定の搬送方向Fに移動する態様となるように振動させる。また、このコントローラCL11、CL12は、パーツフィーダ11の搬送体110やリニアフィーダ12の搬送体120に設けられた搬送物制御手段を構成する搬送物制御機構CP11,CP12を制御することにより、搬送物制御機構CP11,CP12により、例えば気流を吹き付けることで、搬送物を搬送路111,112上から排除したり、搬送路111,112上の姿勢を変更したり(反転若しくは横転させたり)する。コントローラCL11、CL12は、上記制御システムの主体となる画像処理機能を有する検査処理ユニットDTUに入出力回路(I/O)を介して接続される。
また、コントローラCL11,CL12は、下記の動作プログラムを実行する後述する演算処理装置MPUに対して、マウスなどの後述する操作入力装置SP1,SP2などを介して所定の操作入力(デバッグ操作)が行われると、上記の動作プログラムに従って搬送装置10の駆動を停止する。このとき、上記の動作プログラムに従って、例えば、検査処理ユニットDTUにおける画像計測処理も停止される。このデバッグ操作及び当該操作に応じた各所の動作については後に詳述する。
検査処理ユニットDTUは、パーソナルコンピュータ等の演算処理装置MPU(マイクロプロセシングユニット)を中核構成とし、図示例では、上記演算処理装置MPUは、中央処理ユニットCPU1,CPU2、キャッシュメモリCCM、メモリコントローラMCL、チップセットCHSなどから構成される。また、この検査処理ユニットDTUには、撮像手段であるカメラCM1,CM2にそれぞれ接続された画像処理を行うための画像処理回路GP1,GP2が設けられる。これらの画像処理回路GP1,GP2はそれぞれ画像処理メモリGM1,GM2に接続される。画像処理回路GP1,GP2の出力は上記演算処理装置MPUにも接続され、カメラCM1,CM2から取り込んだ撮影画像GPXの画像データを処理し、適宜の処理画像(例えば後述する画像エリアGPY内の画像データ)を演算処理装置MPUに転送する。主記憶装置MMには予め制御システムの動作プログラムが格納されている。検査処理ユニットDTUが起動されると、演算処理装置MPUにより上記動作プログラムが読み出されて実行される。また、この主記憶装置MMには、演算処理装置MPUにより、後述する画像計測処理を実行した対象となる撮影画像GPX若しくは画像エリアGPYの画像データが保存される。
また、検査処理ユニットDTUは、入出力回路(I/O)を介して液晶モニタ等の表示装置DP1,DP2や操作入力装置SP1,SP2に接続される。表示装置DP1,DP2は、上記演算処理装置MPUによって処理された撮影画像GPX若しくは画像エリアGPYの画像データ、後述する限定領域CR1〜CR5の画像データDや分布パターンDs、及び、これらに対応するパターン類型PTの表示、並びに、分類カテゴリーCGの表示、さらには、必要に応じて、画像計測処理の結果、すなわち、搬送物検出処理や搬送物判定処理の結果などが、所定の表示態様で表示される。なお、この表示機能は、実際に搬送物が搬送されている場合に限らず、後述するように、過去のデータを読みだして再生している場合にも機能する。また、表示装置DP1,DP2の画面を見ながら操作入力装置SP1,SP2を操作することにより、各種の操作指令、設定値などの処理条件を入力することができる。
次に、本実施形態を含む上述の制御システムを用いた、搬送装置10における搬送物の基本的な検出方法及び判定方法の例について説明する。図2は、本実施例における搬送物の形状及び搬送路121上の搬送姿勢を示す説明図である。図示例において、搬送物Pは、略立方体形状(例えば、立方体の8つの角部を丸めた形状)を有する電子部品(例えば、チップ抵抗、チップインダクタ、チップコンデンサなど)である。この搬送物Pは、相互に直交する搬送面121a,121bを備えた搬送路121上において、主として長軸(主軸)を搬送方向Fに向けた図示の横姿勢で搬送される。この横姿勢において搬送物Pの前後両端には金属製の端子部Paが露出し、その間の側面部分には絶縁材からなる白色面Pb及び方向識別マークである黒色面Pcが露出している。この搬送物Pの正規の搬送姿勢は、例えば、先端面Pt5を搬送先(下流側、図示左側)に向け、後端面Pt6を搬送元(上流側、図示右側)に向けた姿勢であって、四つの側面Ps1〜Ps4のうち、搬送先の側に白色面Pb、搬送元の側に黒色面Pcが表れる側面Ps1が上方を向く姿勢(図9参照)であり、全体が白色面Pbである側面Ps2が搬送路121の開放された側の側方を向く姿勢となる。ただし、正規の搬送姿勢は上記以外の姿勢であってもよく、搬送物Pの態様によっては前後の向きだけが定められる場合や主軸周りの姿勢のみが定められる場合があってもよい。
なお、図2及び図3では、搬送路121の搬送面121aが相対的に急峻な面であり、搬送面121bが相対的になだらかな面であって、カメラCM1,CM2が図示下方の手前側(すなわち搬送面121bの手前上方側)から斜めに撮像したときの画像を示している。この状況の一例は、図9に示す搬送体の断面構造に示されている。このため、搬送物Pにおいて、搬送路121上における図示上側に配置された側面(搬送面121a側に配置される側面)が上方を向く面(以下、単に「上方側面」という。)であり、図示下側に配置された側面(搬送面121b側に配置される側面)が側方を向く面(以下、単に「側方側面」という。)である。図2中の左端にある搬送物Pについて言えば、上方側面が側面Ps1であり、側方側面が側面Ps2である。
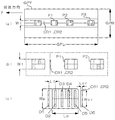
図3は、図2に示す搬送物Pの搬送姿勢が正規のものであるか否かを判定するための計測エリアの設定例を説明するための説明図(a)〜(c)である。カメラCM1,CM2によって撮影された撮影画像GPXは、上記画像処理回路GP1,GP2によって適宜に処理され、図3(a)に示すように、搬送路121上の搬送方向Fと直交する方向について必要な範囲である画像幅GPWに含まれる画像データのみが取り込まれる。また、撮影画像GPXのうちの搬送方向Fに沿った範囲についても、図示のように画像長GPLに限定した範囲で画像データを取り込むようにしてもよい。このように撮影画像GPXから、実際に取り込まれ、演算処理装置MPUに転送される画像エリアGPYを限定することによって、取込速度及び転送速度を向上させることができる。本実施形態の画像エリアGPYは、典型的には、図3(a)に示すように搬送方向Fに長い矩形領域となる。
上記制御システムでは、上記動作プログラムに組み込まれて実行される検査処理コンポーネントに従って行われる画像計測処理によって、搬送物Pに対する検出(検査)及び判定が行われる。この画像計測処理は、図3(a)に示す上記画像エリアGPYの全体にわたり行われるのではなく、この画像エリアGPYの一部の限定された領域のみに対して行われる。この領域は処理内容に応じて異なるように設定され得る。特に、第1実施形態では、後述する搬送物Pの計数処理において、搬送経路を通過する搬送物Pの全体ではなく一部のみを包含しうる限定領域CR1、CR2の画像データを処理する。
図3に示す限定領域CR1、CR2は、本発明に係る第1実施形態の搬送物の判定装置において設定されたものである。この限定領域CR1、CR2は、搬送方向Fと交差(図示例では直交)する延在方向に伸びる線状若しくは帯状に形成される。また、限定領域CR1、CR2は、搬送経路上における搬送物Pの通過範囲Wt(図3(a)及び(b)参照)と重なるように配置される。ここで、本実施形態の場合、搬送物Pは振動によって搬送路121上を移動していくので搬送物Pの通過位置は或る程度ばらつきが生ずる。このため、上記の通過範囲Wtは、搬送物Pが通過する平均位置に対応する範囲とする。図示例では、図3(b)及び(c)に示すように、限定領域CR1、CR2が通過範囲Wt内に収まるように設定される。より具体的には、限定領域CR1、CR2の搬送方向Fに沿った長さをLcr、延在方向の幅をWcrとすると、幅Wcrの全体が通過範囲Wt内に配置されるとともに、幅Wcrが通過範囲Wtより小さくなるように構成される。このとき、幅Wcrは通過範囲Wtの80%以上であることが好ましい。このように設定すると、搬送物Pの通過位置が上記通過範囲Wtに対して多少ばらついたとしても、限定領域CR1、CR2の全体がほぼ常に搬送物Pの通過位置と重なるように構成できる。なお、図示例では、横向きの搬送物Pのみが通過する場合の通過範囲Wtを図示している。しかし、縦向きの搬送物Pも通過する場合には、分類カテゴリーや判定内容に応じた必要な限定領域の範囲を設定するために、そのまま横向きの搬送物Pに対応する通過範囲Wtを用いてもよく、縦向きの搬送物Pも含めたより広い通過範囲を設定してもよい。
上記線状若しくは帯状の限定領域CR1、CR2は、撮影画像GPX若しくは画像エリアGPYのうちの少なくとも上記延在方向に沿って一列の画素が配列される領域であればよい。しかし、上記延在方向に沿って2列以上の画素が配列された領域であっても構わない。特に、図示例のように、限定領域CR1、CR2が直線状に構成されることが好ましく、また、上記延在方向が上記搬送方向Fと直交する方向(幅方向)であることが望ましい。図3(c)に示すように、搬送物Pの正規の姿勢における搬送方向Fに沿った長さをLp、幅をWpとすると、Lp×Wp>Lcr×Wcrである。また、図示例では、Wp>Wcrである。さらに、図示例では、Lcr<Wcrである。
本実施形態では、カメラCM1,CM2は、予め設定された既定の撮影周期で繰り返し撮影を実行し、当該撮影タイミングごとに撮影画像GPX若しくは上記画像エリアGPY内の画像データが画像処理装置GP1,GP2を介して上記演算処理装置MPUに転送される。演算処理装置MPUでは、転送された上記画像データのうち、上記限定領域CR1内の限定画像データDを取得し、上述の演算処理用メモリRAMなどに取り込み、後述するように処理し、検出又は判定を行う。ただし、この制御システムでは、別途トリガセンサを設けたり、搬送物Pの画像データ中から搬送物Pの所定の形状パターンを所定の領域内でサーチし、当該形状パターンが検出されたときに内部トリガを発生させたりするのではなく、既定の撮影周期を示す外部トリガを導入したり、演算処理装置MPUから一定周期のトリガ信号をカメラCM1,CM2に出力したりするなどの方法で、所定の撮影間隔で繰り返し撮影を実行している。このため、搬送路121上を搬送されてくる全ての搬送物Pについて、各搬送物P毎にそれぞれ少なくとも一つの取得タイミングで限定領域CRの画像データを取得できるようになっている。すなわち、限定領域CR1、CR2の画像データDの取得タイミングは、各搬送物Pが限定領域CR1、CR2に対して少なくとも1回重なるように設定される。後述するように予め上記撮影間隔を一定値に設定することにより、上記条件が成立する。ただし、上記条件させ満たされるのであれば、撮影間隔や取得タイミングの時間間隔が変動するように設定してもよい。例えば、搬送物Pの搬送速度の検出値や搬送速度に相関のある制御値や検出値などに応じて撮影間隔や取得タイミングの時間間隔を設定するなどの方法を用いてもよい。
本実施形態では、撮影間隔、すなわち、限定領域CR1、CR2の画像データの取得タイミングの時間間隔を一定にする。このとき、撮影周期をTs[sec]、搬送物Pの搬送方向Fの長さをLp[mm]、搬送物Pの搬送速度をVp[mm/sec]とした場合、各搬送物Pに対して限定領域CR1、CR2が少なくとも1回以上の撮影タイミングにおいて重なるようにするためには、上記撮影周期Tsを以下の式(1)のように設定する。
Ts<Lp/Vp…(1)
例えば、搬送物Pの搬送方向Fの長さLpが0.6[mm]、搬送速度Vpが50[mm/sec]であるとすれば、撮影周期Ts<0.012[sec]となる。これは、撮影間隔、すなわち、限定領域CR1、CR2の画像データDの取得タイミングの時間間隔が12[msec]未満であれば、全ての搬送物Pについて、各搬送物P毎に上記画像データDを取得することができることを意味する。
しかしながら、上記の条件ではデータ量が少ないために処理速度を高めることができるものの、各搬送物P毎に限定領域CR1、CR2の画像データDを取得することのできる最低条件であるため、判定内容によっては十分な判定精度を得ることができない。また、実際には、搬送物Pの搬送速度Vpには、個体ごとに、場所により、或いは、経時的に、ばらつきが存在する。このため、各搬送物P毎に複数(n)回の取得タイミングが得られるようにすることがより好ましい。ここで、nは2以上の自然数である。これにより、以下の式(2)のように設定する。
Ts<Lp/(n×Vp)…(2)
本実施形態の場合には、nを3?7の範囲になるように設定している。これは、nが小さくなると搬送速度のばらつきによる搬送物Pの撮影漏れが生ずる虞が高くなり、逆にnが大きくなると画像処理の負荷が増大するからである。例えば、図3(c)や図11に示す画像データDの取得タイミングはn=4の例であり、図12に示す画像データDの取得タイミングはn=6の例である。一般的には、自然数nは1〜10の範囲内であることが好ましい。nを複数とする場合には、nは2〜10の範囲内であることが望ましい。図3(c)においては、限定領域CR1、CR2の画像データD1〜D6の取得タイミングの時間間隔Tsに対応して、搬送物Pに対する限定領域CR1、CR2の取得タイミング毎の位置変化が搬送方向Fに距離Dtずつ生ずる。なお、本実施形態の搬送物の判定装置では、一例として、n=6、撮影周期Tsを2[msec]=0.002[sec]とした場合について以下に説明する。これにより、各搬送物Pに対してそれぞれ6回前後の限定領域CR1、CR2の画像データを取得できることになる。なお、本実施形態では、上記撮影画像GPX若しくは上記撮影エリアGPYの画像データから限定領域CR1、CR2の画像データDを取得しているが、ラインセンサや小型カメラなどによって限定領域CR1、CR2の画像データを直接に取得するようにしても構わない。
上記の例では、主軸方向が搬送方向Fを向いた横向きの搬送物Pの全長Lpを基準として説明した。しかし、判定内容が搬送物Pの一部だけを対象とする場合には、全長Lpの代わりに、その一部の長さを用いる。例えば、搬送物Pの主軸周りの回転姿勢だけを判定対象とする場合には、判定対象部分は側面部分Ps1〜Ps4だけであるため、この判定対象部分の長さ(例えば、図10(b)に示す長さLDRを参照)を基準とする。また、図9に示すように横姿勢の搬送物P1、P2だけでなく縦姿勢の搬送物P4(ただし、反対側へ倒れた縦姿勢の搬送物P7は除外される。)も搬送されてくる箇所では、図示例のように横姿勢の長さLpが幅Wpより大きければ、縦姿勢の搬送物Pに対しても少なくとも1回の画像データDが得られるように、縦姿勢の搬送物Pの搬送方向の長さである幅Wpを基準とする。なお、本実施形態の場合には、上述のように搬送物Pが限定領域CR1、CR2と重なる位置に到達することを検知するトリガ信号を用いないので、或る撮影画像GPX又は画像エリアGPYの限定領域CR1、CR2に搬送物Pやその判定対象部分がそもそも全く配置されていない場合も生じ得る。
本実施形態では、図3(c)に示す限定領域CR1、CR2の画像データDの典型例として、図4(a)に示すように、上記限定領域CR1、CR2の画像データDの画素値の分布パターンDs1〜Ds5が得られる限定領域CR1,CR2の搬送物Pに対する相対位置を設定する。すなわち、画像データDは、限定領域CR1、CR2の延在方向(幅方向、図示上下方向)に沿って図4(b)に示される分布パターン(1次元プロファイル)Ds1〜Ds7を有する。ここで、上記画素値は図示例では輝度値(明度)である。図4(b)の各グラフは、縦軸がフルスケール256で表わされた輝度値、横軸が0〜40までの画像データDの画素列中の画素番号を示す。図示例では、限定領域CR1、CR2において、延在方向(幅方向)に沿って一列に40ピクセルの画素が配列された場合を示している。したがって、画像データをD={d1,d2,・・・dm}(画素値、mは自然数)とすると、m=40となる。なお、限定領域CR1、CR2は一列の画素配列からなるものである必要はなく、二列以上の画素配列を有するものであってもよい。また、この場合には、画素値の分布パターンとして1次元プロファイルではなく、2次元プロファイルを用いるようにしてもよい。さらに、この場合には、二列以上の画素配列から1次元プロファイル(分布パターン)を形成するための前処理(中央値や平均値などの代表値の抽出などの処理)を実行してもよい。
なお、図4に示す搬送物P1〜P6は、横姿勢の搬送物P1〜P3と、縦姿勢の搬送物P4〜P6を含む。ここで、図9に示すように、縦姿勢の搬送物としては、主軸が搬送面121bに沿った縦姿勢の搬送物P4と、主軸が搬送面121aに沿った縦姿勢の搬送物P7とが存在し得るが、本実施形態では、搬送物P7と同じ姿勢の搬送物Pは、限定領域CR1、CR2の設定される箇所よりも上流側において、気流供給路121cを介して供給され、気流供給口121dから吹き付けられる気流によって排除されるか、或いは、横転される。このため、図4には、搬送物P4と同じ縦姿勢の搬送物P5、P6は含まれるが、搬送物P7と同じ縦姿勢の搬送物は含まれない。ただし、本実施形態とは異なり、搬送物P7と同じ縦姿勢の搬送物Pが到来する可能性のある箇所や実施例では、このような搬送物をも考慮する必要がある。
本実施形態では、限定領域CR1、CR2の画像データDの画素値の分布パターンDsを、図示例の分布パターンDs1〜Ds7に対応するパターン類型PT1〜PT7に類型化した。すなわち、取得された画像データDを上記画素値の分布パターンDs1〜Ds7に対応する7つのパターン類型PT1〜PT7のいずれか一つに関連付ける。ここで、分布パターンDs1に対応するパターン類型PT1は、限定領域CR1、CR2が横姿勢にある搬送物P1の端子部Paと重なる場合の分布パターンに対応する。また、分布パターンDs2に対応するパターン類型PT2は、限定領域CR1、CR2が横姿勢にある搬送物P1の白色面Pbと黒色面Pcにわたり重なる場合の分布パターンに対応する。さらに、分布パターンDs3に対応するパターン類型PT3は、限定領域CR1、CR2が横姿勢にある搬送物P1の白色面Pbと重なる場合の分布パターンに対応する。なお、このパターン類型PT3には、縦姿勢の搬送物P6の端子部Paから白色面Pbにわたり重なる場合の分布パターンも包含される。また、分布パターンDs4に対応するパターン類型PT4は、限定領域CR1、CR2が縦姿勢にある搬送物P2の黒色面Pcと白色面Pbにわたり重なる場合の分布パターンに対応する。さらに、分布パターンDs5に対応するパターン類型PT5は、限定領域CR1、CR2が縦姿勢にある搬送物P4の端子部Paから白色面Pbと黒色面Pcにわたり重なる分布パターンに対応する。また、分布パターンDs6に対応するパターン類型PT6は、限定領域CR1、CR2が縦姿勢にある搬送物P5の端子部Paから白色面Pbと黒色面Pcにわたり重なる場合の分布パターンに対応する。さらに、分布パターンDs7に対応するパターン類型PT7は、限定領域CR1、CR2が前後の二つの搬送物の間の隙間と重なる場合の分布パターンに対応する。このパターン類型PT7には、前後の搬送物が離れて搬送されてくる場合の隙間だけでなく、図示例のように二つの搬送物P2とP3が連なった状態で搬送されてくるときの前後の搬送物の当接部分の分布パターンが含まれる。
なお、以上のパターン類型は、上記の組み合わせPT1〜PT7に限られるものではない。例えば、パターン類型PT3を、横姿勢の搬送物P1の白色面Pbと重なるときの分布パターンに対応する類型と、縦姿勢の搬送物P6の端子部Paと白色面Pbに重なるときの分布パターンに対応する類型とに分けてもよい。また、パターン類型PT7を、前後の搬送物Pが離間しているときの分布パターンと、前後の搬送物Pが当接しているときの当接部分の分布パターンとに分けてもよい。また、上記の複数のパターン類型への関連付けは必須のものではなく、結果として、取得された画像データDの分布パターンDsが以下に説明するいずれかの分類カテゴリーに明確に分類し得るようになっていればよい。すなわち、分類器(データ分類手段)において、所定の画像データDに対して正解の分類カテゴリーが必ず存在するように設定されていればよい。ここで、上記パターン類型は、搬送物Pに対する限定領域CRの位置関係の区分に対応するものである。
本実施形態においては、分類器によって分類される分類カテゴリーとして、上記パターン類型PT1〜PT6に対応する分類カテゴリーCGAと、上記パターン類型PT7に対応する分類カテゴリーCGBとを設定する。これにより、上記の限定領域CR1、CR2の画像データDは、それぞれ、検査処理ユニットDTU内の演算処理装置MPUによる上記検査処理コンポーネント内の分類処理ユニットの実行によって構成されるデータ分類手段である分類器によって、二つの分類カテゴリーCGAとCGBに分類される。すなわち、本実施形態では、限定領域CR1、CR2の画像データDを、上記パターン類型PT1〜PT6に対応する分類カテゴリーCGAと、上記パターン類型PT7に対応する分類カテゴリーCGBとに分類する分類問題として処理する画像処理工程を実行する。ここで、分類カテゴリーCGAは、限定領域CR1,CR2が搬送物Pと重なる場合、すなわち搬送物Pが有る場合に対応し、分類カテゴリーCGBは、限定領域CR1,CR2が搬送物Pと重ならず、隙間と重なる場合、すなわち搬送物Pが無い場合に対応する。この画像処理工程を実行する分類器は、機械学習分類器であり、本実施形態では、ニューラルネットワークを用いた学習済みモデルである。図5(a)には分類器の概略構成を模式的に示し、図5(b)には分類器を学習させる際の概略の手順を示す。
本実施形態のデータ分類手段である分類器は、図5(a)に示すように、全結合型のニューラルネットワークを有する。このニューラルネットワークは、入力層I、中間層M1,M2,M3、及び、出力層Oを備えている。入力層Iは上記分布パターンDs={d1,d2,・・・dm}(mは自然数、d1,d2,・・・dmは画素値)のm(=40)に対応するm個のユニットi1,i2,・・・imを備える。ここで、あらゆる連続な非線形関数は3層ニューラルネットワークで近似できるということが証明されている。このため、中間層を設けることによって柔軟な分類問題の解決が可能である。この場合において、中間層M1はh個のユニットm11,m12,・・・m1h(hは自然数)を備える。このユニット数hは、入力層Iのユニット数mより大きい。これにより、中間第1層M1において画像データDの情報は増幅される(低次元のデータから高次元のデータへマッピングされる)ため、学習データセットを用いた学習により判定精度が向上することが期待される。また、複数の中間層M1,M2,M3を備えることにより、中間層M1で増幅された情報を中間層M2,M3で集約する(高次元のデータから低次元のデータにマッピングする)ことにより、出力層Oへの出力を適切に実現することが期待される。
本実施形態では、上記限定領域CR1、CR2が搬送物Pと重なる位置にある(CGA)か、それとも、搬送物Pと重なっていない位置にあるか(CGB)の二つに分類する。このため、上記ニューラルネットワークの出力層Oは分類するカテゴリー数である2つのユニット(素子)o1,o2を備える。図示例では、出力層Oの出力値{o1,o2}は活性化関数によって処理され、最終的に分類結果E={e1,e2}が得られる。ここで、例えば、o1,o2は実数であり、それぞれが分類結果の確率を表す値を呈する。また、e1,e2は0か1(或いは±1)である。例えば、E={1,0}は搬送物Pが有る場合、E={0,1}は搬送物Pが無く、隙間である場合に対応する。活性化関数は、出力層Oの出力値{o1,o2}から分類結果Eを導出するためのものであり、特に限定されないが、例えば、Softmax関数などを用いることができる。
上記ニューラルネットワークを含む分類器(データ分類手段)は、例えば、図5(b)に示す手順を備えた方法により構成することができる。まず、画像データDの取得と、この画像データDに対するラベル付け処理、すなわち、各画像データDが上記パターン類型PT1〜PT7のいずれに属すべき分布パターンを備えているかを検討し、正解の分類カテゴリーをラベル付けする。これを多数の画像データDに対して行うことにより、画像データDとその正解カテゴリーの関連付けを有する学習データ(train data)、検証データ(validation data)、評価データ(test data)等を作成することができる。この各データを作成するための上記ラベル付け処理は人手により実施できる。また、上記ラベル付け処理は、図10などで説明する従来の画像処理方法(テンプレートマッチングなど)などにより自動で行うことも可能である。なお、本実施形態では、上述のように、各画像データDを分類カテゴリーCGAとCGBにラベル付けするが、その前に、各画像データDをパターン類型PT1〜PT7に関連付けした学習データを作成しておくことにより、本実施形態とは異なる分類カテゴリーへの分類処理にも使用可能な基礎データを用意することができる。
上記のラベル付け処理においては、限定領域CR1、CR2の画像データD(の分布パターンDs)自体に基づいて行うのではなく、上記撮影画像GPXや画像エリアGPYに含まれる搬送物Pの全体状況や、複数の搬送物P(前後の搬送物Pなど)に対する限定領域CR1,CR2の位置関係に応じて行われる。例えば、本実施形態の分類器(データ分類手段)は、入力された分布パターンDsのみにより分類カテゴリーCGAとCGBのいずれかに分類を行う。これに対して、学習データを作成するときの各分布パターンが分類されるべき正解の分類カテゴリーCGA,CGBは、搬送物Pに対する限定領域CRの位置関係によってラベル付けされることが好ましい。すなわち、正解の分類カテゴリーは、その分類処理の目的と直接に対応する図4(a)に示す限定領域CR1、CR2の搬送物P1〜P6に対する位置関係によって決定される。そして、上記の位置関係は、上記パターン類型PT1〜PT7によって表わされる。したがって、実際に取得される画像データDの分布パターンDsがどのようなものであろうとも、上記各学習データ等のラベル付けは上記のパターン類型に基づく(或いは、対応する)ことが好ましい。特に、分布パターン自体を無視して、上記の位置関係のみによって正解のパターン類型PT1〜PT7を定めることにより、最終的な正解の分類カテゴリーが決定されることが望ましい。これにより、人や画像処理における主観的な分布パターンに対する観念を排した、現実の状況に応じた分類処理の実現が期待される。
上記学習データが作成されると、最初に、上記学習データを用いて分類器の学習プロセスを実行する。この学習プロセスでは、ニューラルネットワークの層数、各層のユニット数(素子数)m,h,j,k、出力値に対する活性化関数などのハイパーパラメータと呼ばれる値を設定し、分類器の基本設計を行う。この後、上記学習データを適用し、一般的な誤差逆伝搬法(Backpropagation, BP法)などを用いて分類器の学習を行う。その後、学習データとは別の検証データを用いて検証を行い、その結果に応じて基本設計の変更(ハイパーパラメータの再設定)を実施する。検証結果が良好であれば、さらに評価データを用いて評価を行う。この評価結果に問題があれば再度の学習プロセスや基本設計の変更などを行う。最終的に評価結果が良好であれば、それを学習済みモデルとして、本実施形態の分類器(データ分類手段)として用いる。
図6には、上述のようにして構成した本実施形態の分類器(データ分類手段)を用いて求めた分類結果に基づいて、搬送経路上を搬送される搬送物Pの通過総数を計数する場合の概略の手順を示す。図1に示す搬送装置10が稼働し、搬送物Pが搬送路111,112上を搬送されている状態で、カメラCM1,CM2で上述の撮影間隔Tsとなるように順次に繰り返し撮影を行う。これにより発生した撮影画像GPX若しくは画像エリアGPYの画像データから上記限定領域CR1、CR2の画像データDを取得する。分類器では、この画像データDから、必要に応じて前述の前処理を施し、画素値の分布パターンDs={d1,d2,・・・,dm}を形成する。そして、分類器から最終的な分類結果Eが出力されると、この分類結果E={e1,e2}により、図示一点鎖線にして示した判定処理手段により、搬送物Pが有るか否か(限定領域CR1、CR2が搬送物Pと重なった位置にあるか否か)が判定される。
分類結果E={1,0}となり、最終的に分類カテゴリーCGAに分類される場合、すなわち搬送物Pが有る(限定領域CR1が搬送物Pと重なった位置にある)場合には、過去の画像データDの連続検出数Ncが例えば6より大きいか否かを判定し、連続検出数Ncが6より大きいときには、搬送物Pが新たに到来したとし、通過総数Ndを一つ加算し、連続検出数Ncを0にリセットする。その後、次の画像データDを取得する。これは、前後の搬送物Pの隙間が狭いとき(或いは、前後の搬送物P同士が当接しているとき)に前後の搬送物Pの境界を限定領域CR1、CR2により検出できないことがあるが、この場合でも後続する搬送物Pの計数を行うことができるようにするためである。一方、連続検出数Ncが6以下であるときには、搬送物Pは以前に検出されたものと同じものと判断し、通過総数Ndを加算せずに、連続検出数Ncを一つ加算する。その後、次の画像データDを取得する。
分類結果E={0,1}となり、最終的に分類カテゴリーCGBに分類される場合、すなわち搬送物Pが無い(限定領域CR1、CR2が搬送物Pと重ならず、隙間に位置する)場合には、連続検出数Ncが0より大きいか否かを判定し、連続検出数Ncが0より大きいときには、今まで検出されていた搬送物Pが通過したとし、通過総数Ndを一つ加算し、連続検出数Ncを0にリセットする。その後、次の画像データDを取得する。一方、連続検出数Ncが0であるときには、新たな搬送物Pが未だに到来していないとして、何もせずに、次の画像データDを処理する。なお、以上の判定処理工程(判定処理手段)には、上記分類器とは別に、所定の論理回路などを内蔵した判定処理チップを用いてもよく、また、上記分類器と同様に、上記動作プログラムを構成する検査処理コンポーネント内の判定処理ユニットを実行してもよい。以上説明した判定処理工程の手順を実行する検査処理ユニットDTUは、分類結果に基づいた判定処理器(判定処理手段)を構成する。
上記のように、分類器の分類結果に基づいて計数した搬送物Pの通過総数Nd示す信号は、判定結果として検査処理ユニットDTUから出力される。この通過総数Ndは、最終的に、表示装置DP1,DP2などに表示されたり、或いは、コントローラCL11、CL12などに入力される。本実施形態では、搬送物Pの判定装置として、データ分類手段である分類器において、限定領域CR1、CR2が搬送物Pと重なるか否かという分類処理を行うとともに、この分類結果E={e1,e2}に基づいて、上述の判定処理手段により、搬送経路上の限定領域CR1、CR2における搬送物Pの通過総数Ndを計数するといった判定内容を備えている。
本実施形態の具体的な実施例としては、上記分類器に全結合型のニューラルネットワークを用いた。このニューラルネットワークは、入力層Iの入力数m=40、出力層Oの出力数が2、中間第1層M1のユニット数がh=800、中間第2層M2のユニット数がj=500、中間第3層M3のユニット数k=100である。このニューラルネットワークを備える分類器に、正解の分類カテゴリーがCGAとCGBであるそれぞれ400組の学習データを用いて学習させた。学習率を0.001、バッチサイズ(確率的勾配降下法)を100、オプティマイザをAdamとした。学習データ及び検証データによる精度は最良で94.9%となった。また、評価データによる搬送物Pの判定した通過総数と実際の通過総数の比を分類精度として算出すると、97.72%となり、従来技術(テンプレートマッチング法)による判定精度の92.92%を大きく凌駕した。また、一つの画像データD毎の処理時間は0.276[msec]であり、これも、従来技術の処理時間2.186[msec]に比べて、大幅に短縮された。
本実施形態では、上述のように分類器で2つの最終的な分類カテゴリーCGA,CGBに分類している。しかし、分類器では各画像データDの分類パターンDsを7つのパターン類型PT1〜PT7に分類し、その分類結果E={e1,e2,e3,e4,e5,e6,e7}に基づいて、上記判定処理手段により搬送物Pが有るか無いかを導き出すことによって、最終的に通過総数Ndを求めてもよい。この場合の分類結果に基づいて行われる上記判定処理工程には、本実施形態に対して、7つのパターン類型PT1〜PT7のいずれかに相当する各分類カテゴリーから、搬送物Pが有る場合(パターン類型PT1〜PT6)と搬送物Pが無い場合(パターン類型PT7)のいずれであるかを定めるプロセスが付加される。
本実施形態の搬送物の判定装置は、図7に示す動作プログラムの手順において、所定の搬送物の検査判定処理の結果に基づく搬送物の制御処理の前後における搬送物制御前の計数処理と搬送物制御後の計数処理を行うために用いることができる。ここで、搬送物の制御処理とは、搬送物制御手段により行われる処理であり、例えば、搬送物Pの搬送経路上からの排除や搬送経路上の姿勢変換などの、搬送物Pの選別や整列のための搬送物Pに対する何等かの作用を与える過程を言う。この搬送物の制御処理には、例えば、搬送物P自体の良否や搬送物Pの搬送姿勢の適否に応じた搬送物Pの選別や整列のための各種の処理が含まれる。本実施形態では、図7に示す「搬送物制御前の計数処理」において、限定領域CR1を用いて、上述の通過総数Ndを、上記制御処理を行う前の搬送経路上の搬送物Pの総搬送数として計数する。一方、図7に示す「搬送物制御後の計数処理」においては、限定領域CR2を用いて、上述の通過総数Ndを、上記制御処理を行った後に残った搬送経路上の搬送物Pの良品数として計数する。
図10は、図7に示す搬送物の検査判定処理と搬送物の制御処理の一例を示す説明図である。この図10に示す検査判定処理に係る画像処理では、本実施形態の搬送物の判定装置を用いずに従来技術を採用している。この技術では、画像エリアGPYの中に、例えば、図10(a)において点線で示すような、搬送経路を通過する搬送物Pを包含し得る範囲(サーチエリアSAS)が設定され、この範囲内の画像が処理される。このサーチエリアSASには、図10(b)に示すように、搬送物Pを選別するための制御エリアMESが含まれる。制御エリアMESは、図示例の場合には搬送物Pの選別処理のためのエリアである。また、制御エリアMESは、搬送路121上を通過させるか、或いは、搬送路121上から排除するかによって、搬送物Pを選別し、所望の搬送物Pのみを下流側へ送り出すための領域である。搬送物Pの選別処理については、上記のサーチエリアSAS内の画像データのみが上記画像計測処理の対象となる。
サーチエリアSASには、図10(b)に示すように、上記制御エリアMESの上流側に隣接する第1の計測エリアME1と、上記制御エリアMESの下流側に隣接する第2の計測エリアME2とがさらに含まれる。ここで、制御エリアMESは、搬送物Pが中心位置CLNに形成された選別用噴気口OPSによって排除され得る搬送路121上の領域である。また、第1の計測エリアME1は、上記サーチエリアSASの内部であって、上記制御エリアMESより上流側に設けられ、上流側から搬送されてきた搬送物Pが選別用噴気口OPSによって排除されない下流側の範囲までを含む領域である。さらに、第2の計測エリアME2は、上記サーチエリアSASの内部であって、上記制御エリアMESより下流側に設けられ、制御エリアMESを通過して下流側へ脱出したときの、搬送物Pが選別用噴気口OPSによって排除されない上流側の範囲までを含む領域である。
サーチエリアSAS内では、上記画像計測処理において、予め登録された搬送物Pの画像(以下、単に「基準画像」という。)と対応する外縁形状を備えた画像(以下、単に「検出画像」という。)が存在するか否かが検索される。検出画像が存在する場合には、検出画像が占める領域の位置を搬送物検出領域WDSとして特定する。これが搬送物検出処理である。搬送物検出処理は、搬送物Pの姿勢や欠陥を検出する必要はなく、搬送物Pの存在及び位置を検出するだけでよいので、搬送物Pの外形などのパターン形状や外形の内側の平均明度などの一致度を求め、これを所定の閾値と比較して検出の有無を決定する。また、検出時においては、サーチエリアSAS内におけるパターン形状の位置を算出し、上述のように搬送物検出領域WDSを特定する。なお、搬送物検出処理では、上述の外形などのパターン形状の一致度を判定要素とするだけでもよいが、上述のように外形の内側の平均明度などの一致度をも判定要素とすることにより、搬送物Pの検出精度を高めることができる。例えば、照明方向と部品姿勢との関係により、搬送物Pの明度が全体として暗くなってしまうと、画像の背景との区別が付きにくくなるために検出漏れが生じやすくなるが、平均明度の閾値を低く設定することによって検出漏れを低減できる。
上記の搬送物検出処理において、搬送物検出領域WDSが第1の計測エリアME1内にある場合には、以下に説明する搬送物判定処理が引き続いて行われる。また、搬送物検出領域WDSが制御エリアMES及び第2の計測エリアME2内にあるときには、そのまま計測を実施し、制御エリアMES及び第2の計測エリアME2内の搬送物検出領域WDSがなくなった時点で、搬送物通過検出信号を出力する搬送物通過検出処理を実施する。なお、後述するように、或る一つの搬送物Pが第1の計測エリアME1内に配置されている様子が複数の撮影画像GPXに撮影されている場合には、その都度、搬送物検出処理を実施して搬送物検出領域WDSを導出するが、以下の搬送物判定処理は1回(例えば、初回)のみ実施するようにしてもよい。
搬送物判定処理は以下のように実施される。まず、上記のように特定された搬送物検出領域WDSを基準として、図10(b)に示すように、第1の判定エリアGWAと、第2の判定エリアGWBの位置決めを行い、その明度により側面Ps1〜Ps4に対応するか否かを検出する。例えば、第1の判定エリアGWAが搬送物Pの上方側面上に配置され、第2の判定エリアGWBが搬送物Pの側方側面上に配置される。本実施形態では、上方側面が側面Ps1であり、側方側面が側面Ps2である場合に搬送物Pが正規の姿勢で搬送されている状態であると設定されている。このとき、第1の判定エリアGWAは、側面Ps1を検出するために、搬送方向Fに伸びる細長い判定補助エリアGWA1と、上流側に配置された判定補助エリアGWA2と、下流側に配置された判定補助エリアGWA3とを有する。判定補助エリアGWA1は、側面Ps1の白色面Pbと黒色面Pcの境界を搬送方向Fのエッジ検出処理によって検出し、この検出されたエッジを境界位置として判定補助エリアGWA2及びGWA3の位置を補正する。その後、位置補正された判定補助エリアGWA2及びGWA3の明度を所定の閾値と比較することなどにより、それぞれの明度が正規の姿勢にある搬送物Pと一致するか否かを判定する。図示例では、判定補助エリアGWA2が白色面Pbを検出し、判定補助エリアGWA3が黒色面Pcを検出すると、搬送物Pが正規の姿勢にある良品と判定される。なお、搬送物Pの判定態様(良否の判別)は、姿勢に限らず、形状や寸法等の良不良などであってもよい。
第2の判定エリアGWBは、側方側面が側面Ps2(全て白色面Pbである側面)であるか否かを判定する。この場合にも、第2の判定エリアGWBの明度が所定の閾値よりも高いことなどによって判定を行うことができる。なお、第1の判定エリアGWAと第2の判定エリアGWBの双方を判定することによって判定対象の画像データから得られた取得情報に冗長性を持たせることができるので、画像の明るさなどのばらつきによる誤判定を回避できるなど、判定精度を高めることができる。
一方、上記画像エリアGPYには、上記サーチエリアSASとは別の位置(図示例では、サーチエリアSASよりも上流側の位置)に、搬送物Pを反転若しくは横転させるための反転若しくは横転処理を行うか否かを決定するための判定エリアGV1、GV2が設けられる。第1の判定エリアGV1及び第2の判定エリアGV2は、搬送物Pの上方側面が通過する位置に配置されている。第1の判定エリアGV1は、搬送物Pの上方側面が、上記黒色面Pcを含む上記側面Ps1でない場合、すなわち、全体が白色面Pbである側面Ps2〜Ps4である場合(例えば、所定の閾値よりも明るい場合)に判定結果NGを出力し、端子部Paが含まれていたり、側面Ps1などであったりする場合(例えば、所定の閾値より暗い場合)に判定結果PASSを出力する。また、第2の判定エリアGV2は、第1の判定エリアGV1よりも搬送方向Fに狭い領域である。この第2の判定エリアGV2内において搬送方向Fの走査によりエッジが検出されると、密着して搬送されてきた前後の搬送物Pの境界が配置されているとし、やはり判定結果をPASSとする。そして、判定結果がNGであるときにのみ、反転若しくは横転用噴気口OPRから気流を噴出させ、搬送物Pの上方側面が他の側面となるように反転若しくは横転させる。このようにすることで、第1の判定エリアGV1内に上方側面が配置され、かつ、この上方側面が側面Ps2〜Ps4である(すなわちPs1でない)ときにのみ、搬送物Pの姿勢を変更することができる。
搬送物Pの制御処理の前後において行う本実施形態の判定装置である制御前計数処理及び制御後計数処理は、図10に示す第1の計測エリアME1に配置される限定領域CR1と、第2の計測エリアME2の下流側に配置される限定領域CR2によって実施される。ここで、制御前計数処理に用いる限定領域CR1は、上記第1の計測エリアME1内に設定される。この限定領域CR1は、搬送物Pが制御エリアMESによって排除されることによってその搬送物Pの画像データDを取得できなくなることを回避するとともに、制御エリアMESに到達した搬送物Pが気流等によって移動させられるときの不定姿勢の非搬送姿勢を検出しないようにするため、第1の計測エリアME1内における上流寄りの範囲内に設定されることが望ましい。
また、限定領域CR2は、基本的に限定領域CR1と全く同じ形状及び大きさを備えることができる。限定領域CR2は、第2の計測エリアME2の下流側に隣接する位置に配置される。これは、限定領域CR2において制御エリアMESによって排除される前の搬送物Pの画像データDを誤って取得しないようにするためである。
上記の限定領域CR1の画像データDに基づいて上述のように通過総数Ndを計数することにより、検査判定処理の結果による搬送物の制御処理前の総搬送数を求めることができる。また、上記限定領域CR2の画像データDに基づいて上述のように通過総数Ndを計数することにより、検査判定処理の結果による搬送物の制御処理後の良品数を求めることができる。従って、上記総搬送数と上記良品数から、良品率や不良品数を知ることができる。
なお、図1に示す画像表示装置DP1、DP2などにおいて、適宜に形成される画像表示欄では、上記画像エリアGPY内の画像データを表示するとともに、上記の限定領域CR1、CR2や後述するCR3〜CR5、或いは、サーチエリアSAS、又は、第1の計測エリアME1、第2の計測エリアME2、制御エリアMESなどの各領域を枠線等によって表示することができる。ここで、上記に加えて、或いは、上記とは別に、搬送物検出処理による搬送物検出領域WDS、搬送物判定処理に用いる判定エリアGWA、GWB、反転若しくは横転用噴気口OPRを制御するための搬送物判定処理に用いる判定エリアGV1、GV2の少なくとも一つを、枠線等によって表示することができる。これらの場合には、各枠線等の表示の色や線種などの区別可能な表示態様で、上記の分類結果や判定結果が識別できるように構成してもよい。例えば、上記分類器で分類カテゴリーCGAに分類された場合には、限定領域CR1、CR2の枠線を第1表示態様(例えば、緑色表示)とし、分類カテゴリーCGBに分類された場合には、限定領域CR1、CR2の枠線を第2表示態様(例えば、黄色表示)とする。また、搬送物判定処理でOK判定(判定態様が良品)となった場合には、その枠線等を第3表示態様(例えば青色表示)にする。また、搬送物判定処理でNG判定(判定態様が不良品)となった場合には、その枠線等を第4表示態様(例えば赤色表示)とする。なお、各表示態様は上記例の色彩に限らず、実線、点線、破線、一点鎖線などの線種、太さであってもよいなど、相互に区別できる態様であれば特に限定されない。
本実施形態では、振動式の搬送装置10により、振動する搬送路121上を搬送されていく搬送物Pを検査対象とする一方で、カメラCM1,CM2は振動しない場所(基台100上)に設置されているため、撮影画像GPX又は画像エリアGPYの画像データにおいて、搬送方向Fの前後に往復する態様で所定の振幅で振動する搬送路121は、当該画像データの撮影時の振動位相の変化に応じて、搬送方向Fの変位した位置に配置される。したがって、搬送物Pの外観を、搬送路121を基準とする固定された位置で検出、判定しようとすると、画像内の限定領域CR1、CR2や後述するCR3〜CR5、或いは、サーチエリアSASや各計測エリアME1,ME2の位置を、撮影タイミングに合わせて搬送体120の振動と同期して同振幅で移動させる必要がある。例えば、搬送体120には、振幅が0.1mm、振動周波数が300Hzといった振動が与えられている。
このため、本実施形態では、限定領域CR1、CR2や後述するCR3〜CR5、或いは、サーチエリアSASや各計測エリアME1,ME2の位置を、撮影画像GPX又は画像エリアGPYの撮影時点における搬送体120の振動位置に合わせるために、搬送体120に設定された位置補正用マーク(図示せず)を基準として補正する。この位置補正用マークは位置検出が容易かつ確実なものであれば特に限定されない。しかし、位置補正用マークを、画像中で確実にブロブとして認識でき、かつ、その重心位置を安定して検出できる単色(同一グレースケール)のマークとすることで、その位置の検出精度を高めることができる。なお、位置補正用マークは、意図的に設けたものではなく、搬送装置に本来的に存在し、画像処理によって検出可能な部分、例えば、搬送体120に形成された稜線や角部、ボルトヘッド、噴気口などであってもよい。ただし、搬送物Pによって隠れない場所にあるものが好ましい。
本実施形態においては、上記の位置補正のため、搬送路121に対する限定領域CR1、CR2や後述するCR3〜5、或いは、サーチエリアSASや各計測エリアME1、ME2の位置は、撮影時の振動の位相タイミングとは無関係に、常に搬送路121に対して同じ位置となる。したがって、例えば、不良姿勢の搬送物Pを排除するための排除エアを排除用噴気口OPSから吹き付ける位置、或いは、不良姿勢の搬送物Pの姿勢を修正するための気流を反転若しくは横転用噴気口OPRから吹き付ける位置に対して、限定領域CR1、CR2や後述するCR3〜CR5、或いは、各計測エリアME1、ME2が常に一定の位置関係となるように設定される。これにより、搬送物Pの誤判定(上記の例では、誤計数)を防止することができ、また、搬送物判定処理の結果に応じて搬送物Pに排除力や反転力を作用させる場合に、常に近似したタイミングで作用を生じさせることができる。
本実施形態では、搬送物Pの種類、寸法、良品姿勢、限定領域CR1、CR2や後述するCR3〜CR5の位置(画像内の箇所)、分布パターンDsを形成するための前処理に必要な係数値、或いは、基準画像データ、搬送物検出処理の明度の閾値などの各種の設定値、搬送物判定処理の明度の閾値などの各種の設定値、などといった、搬送物Pの検出及び判定に用いられる各種のデータが主記憶装置MMなどに記憶され、各処理にあたっては適宜に読み出されて使用される。また、カメラCM1,CM2の撮影タイミングを定めるための設定値、撮影画像GPX又は画像エリアGPYを取り込む際の画像取込条件の設定値、搬送路121の振動による各設定エリアの位置補正の態様を定める設定値、各種の設定画面や表示画面の態様を定める設定値、反転若しくは横転の位置や選別位置における制御の態様、例えば、気流の吹き付けタイミングや圧力値などの設定値、などについても同様に取り扱われる。
本実施形態では、上記主記憶装置MM内に保存されている過去の撮影画像GPX又は画像エリアGPYを時系列にて繰り返し格納した画像ファイルを選択して読み出し、表示させることができる。そして、選択された画像ファイルに対する各種の操作処理を実行するための手段も用意される。このような撮影画像GPX若しくは画像エリアGPYの表示・再生機能は、限定領域CR1、CR2や後述するCR3〜CR5の画像データDだけでは理解できないデータ処理の不具合を後から検証する場合に大きな効果を発揮する。
主記憶装置MM内に保存される画像ファイルは、運転モードにおいて取り込まれる複数の撮影画像GPX又は画像エリアGPYの画像データを、演算処理装置MPUにより自動的に記録したものである。この画像ファイルの保存は、主記憶装置MMに空き容量が存在する場合には全ての画像データについて実施することができるが、主記憶装置MMに空き容量が存在しない場合でも、最新の既定期間分(例えば1時間分など)、或いは、最新の既定枚数分(例えば1000枚分など)の画像ファイルについては常に保存されるようにしておくことが好ましい。
上記のように過去に記録した撮影画像GPX又は画像エリアGPYを表示した状態で、この画像データに対して、適宜の操作により、本実施形態の搬送物の判定装置に対応する上記制御処理前後の計数処理、或いは、上記搬送物検出処理及び上記搬送物判定処理からなる画像計測処理を再度実行することができる。表示態様の制御機能の一つとして、同一ファイル内に格納された複数の撮影画像GPX又は画像エリアGPYについては、適宜の操作により、前後に撮影された他の画像データに一つずつ切り替えることができる。また、同一画像ファイル内の複数の撮影画像GPX又は画像エリアGPYを繰り返し表示しつつ、並行して、表示された画像データに対する画像計測処理を実行させることもできる。
次に、図7を参照して、本実施形態の全体の動作プログラムの流れについて説明する。図7は、上記検査処理ユニットDTUの演算処理装置MPUにより、動作プログラムに従って実行される処理の概略フローチャートである。この動作プログラムを起動すると、まず、上記の画像撮影、並びに、上記の制御前係数処理及び制御後係数処理を含む画像計測処理が開始されるとともに、コントローラCL11、CL12により搬送装置10(パーツフィーダ11及びリニアフィーダ12)の駆動が開始される。そして、前述のデバッグ操作に応じたデバッグ設定がOFFであれば、撮影画像GPX又は画像エリアGPYに対して画像計測処理が実行され、制御処理前後の計数処理とともに検査判定処理が実行される。最終の判定結果がOK判定であれば、デバッグ操作が行われない限り、そのまま次の撮影画像GPX又は画像エリアGPYの画像計測処理が実施される。
搬送路111,121上に設けられた搬送物Pの選別位置では、例えば、常時は排除用噴気口OPSから気流が流れているが、判定結果がOK(良品)であれば、排除用噴気口OPSの気流を停止し、全ての良品が制御エリアMESを通過した後に気流を復帰させる。これにより、不良の搬送物Pを搬送路121上から排除する。なお、この選別位置において、常時は排除用噴気口OPSからの気流を停止させておき、判定結果がNG(不良品)であるときに上記気流を発生させてもよい。また、搬送路111,121上に設けられた搬送物Pの搬送姿勢の反転若しくは横転位置では、常時は反転若しくは横転用噴気口OPRからの気流は停止される。一方、判定結果がNG(不良品)であれば、反転若しくは横転用噴気口OPRから気流を噴出させて搬送路121上で反転させる。なお、この反転若しくは横転位置においては、反転若しくは横転用噴気口OPRから気流が常時流れるようにし、良品が検出されたときにのみ当該気流を停止するようにしてもよい。
このようにして、搬送路121上で搬送物Pが制御されることにより、下流側へは良品(正規の姿勢にある部品)のみが整列した状態で供給されていく。この場合にも、その後、デバッグ操作が行われない限り、そのまま次の撮影画像GPX又は画像エリアGPYの判定が実施される。上記の途中でデバッグ操作が行われ、デバッグ設定がONになると、上記ルーティンから抜け出して、搬送装置10の駆動が停止され、画像計測処理も停止される。そして、この状態において適宜の操作を行うと、前述のように画像ファイルを選択可能な状態となる。このとき、選択表示される画像ファイルは、直前の運転モードにおいて記録していた複数の撮影画像GPX又は画像エリアGPYを含む画像ファイルである。これをそのまま選択して適宜の操作をすると、再実行モードに移行する。このモードでは、上述のようにすでに実行された制御動作を記録した画像ファイルに基づいて、画像の表示や検出及び判定を再実行させることができる。すなわち、搬送装置10の搬送物Pの制御処理に不具合が生じた場合には、この不具合を解消するために、まず、過去の画像データに基づいて画像計測処理を再実行することによって、画像計測処理の問題箇所を探る。当該問題箇所が判明すれば、それに応じて検出や判定の設定内容(設定値)を変更、調整し、再び過去の画像データに対して画像計測処理を再実行することで調整、改善作業の結果を確認することができる。なお、この点は、本実施形態の上記計数処理についても同様であり、計数処理に不具合が生じた場合の計数処理の再実行、設定内容の変更、調整などについても同様である。その後、適宜の復帰操作を行うと、デバッグ設定がOFFに戻され、画像計測処理が再開されるとともに、搬送装置10の駆動が再開される。また、表示装置の画面は運転モードの表示画面に戻る。
以上説明した本実施形態では、カメラCM1,CM2が所定の撮影間隔で繰り返し撮影するとともに、搬送物の搬送速度Vsと撮影間隔Tsとの関係により搬送路121を通過する全ての搬送物Pについて、各搬送物P毎に上記限定領域CR1、CR2や後述するCR3と常に重なるように予め設定されることにより、いずれかの撮影画像において上記限定領域内の画像データDにより全ての搬送物Pの情報を検出することができるため、従来技術のように個々の搬送物の位置を検知するためのトリガ信号を生成する必要がなくなる。また、この画像データDの画素値の分布パターンDsを分類器(データ分類手段)により所定の分類カテゴリーに分類することで得た分類結果に基づいて判定を行うことにより、判定精度を確保しつつ、短時間に処理を行うことが可能になる。すなわち、搬送物Pの検出処理を分類問題として処理することと処理に要するデータ量を低減することにより、前記搬送物Pを判定するための画像計測処理を高速かつ高精度に行うことができる。
前述のように、本実施形態の搬送物の判定装置に相当する搬送物Pの計数処理手段を設けることで搬送物Pの選別位置における良品率や不良品数を求めることができるので、上流側の整列効率や供給先への供給効率を推測することができる。このため、上記の良品率が一定の割合を下回ったときや不良品数が一定数を越えたときには、自動的にコントローラCL11及びCL12に指令を出し、搬送装置10の駆動を停止するように構成することもできる。なお、このような判定結果に応じた搬送装置10の駆動制御方法としては、駆動停止以外に、搬送速度やその他の搬送態様を変化させるように加振手段の駆動力(電圧や電流など)、振幅、周波数などを制御するものであってもよい。
なお、搬送物の制御処理手段の一例としては、例えば、前記搬送経路上の前記搬送物に対してエアなどの気流を吹き付けて、搬送物を吹き飛ばしたり、姿勢を変更させたりする気流吹付機構が挙げられる。この気流吹付機構は、搬送経路の搬送面に開口した気流吹付口と、この気流吹付口から気流を流出させることを可能にするための気流供給経路と、この気流供給経路に気流を供給するコンプレッサやガスタンクなどの気流供給源とを備える。また、上記搬送物制御手段の他の例としては、搬送経路上の搬送物に当接し、搬送物を機械的に搬送経路上から排除したり、姿勢を機械的に変換(反転、横転)させる機械的作用機構が挙げられる。さらに、上記搬送物制御手段の別の例としては、搬送経路の所定箇所の経路幅、搬送面の傾斜角や勾配、搬送面の形状などを変更したり切り替えたりすることにより、搬送物の選別率を調整する搬送経路の調整機構を挙げることもできる。このような搬送経路の調整機構は、上記所定箇所において搬送物の搬送態様が変化したり切り替えられたりすることにより、結果的に搬送物の選別態様や姿勢などを制御することができる。
次に、本発明の第2実施形態に係る搬送物の判定装置により、上記の搬送物の検査判定処理を行う場合について説明する。この場合には、搬送物の搬送姿勢を判別する必要があるため、第1実施形態の限定領域CR1やCR2とは異なる形状や大きさの限定領域CR3を用いる。これは、第1実施形態では、異なる搬送姿勢の搬送物Pに重なる限定領域CR1,CR2の画像データDの分布パターンDs同士が判別できず、同一のパターン類型に対応していたためである。図8は、この限定領域CR3の搬送物Pに対する相対位置を示す説明図(a)及び限定領域CR3の画像データDの分布パターンDsを示すグラフ(b)〜(h)である。
前述のように、第1の計測エリアME1に搬入されてくる搬送物Pは、図9に示すように、縦姿勢の搬送物P4とP7のうちの、主軸が搬送面121aに沿った縦姿勢の搬送物P7が気流供給路121cを介して気流供給口121dから吹き付けられる気流によって排除されるか、或いは、横転されることによって、主軸が搬送面121bに沿った縦姿勢の搬送物P4のみとなる。このため、この縦姿勢の搬送物P4の情報を確実に得るために、限定領域CR3は、横姿勢の搬送物P1及びP2に対応する限定領域CR1、CR2に対して、縦姿勢の搬送物P4〜P6に対応する図示下方の側に延長した形状とされる。なお、縦姿勢の搬送物P7も搬入されてくる箇所である場合には、限定領域CR3はさらに反対側にも延長された形状とすることが好ましい。
ここで、限定領域CR3は、少なくとも、図8に示す横姿勢の搬送物P1やP2と、縦姿勢の搬送物P4〜P6とを判別できるように、上記限定領域CR1よりも縦方向に長く設定される。図示例では、限定領域CR1ではm=40であるのに対して、限定領域CR2ではm=80である。また、限定領域CR3は、搬送物の通過範囲Wtに対して、そのの両側に当該通過範囲から張り出した端部分をそれぞれ備えることが望ましい。この場合において、前記限定領域は、前記通過範囲の120%以下の領域であることが望ましい。図示例では、限定領域CR3は、上記横姿勢の搬送物P1やP2と縦姿勢の搬送物P4〜P6の双方の通過範囲の幅方向両側に、それぞれ当該通過範囲より張り出す端部分を備えている。当該端部分は、例えば、限定領域の全幅の10〜20%程度、図示例(m=80)であれば、8〜16ピクセル程度の張り出し長さに設定される。これにより、限定領域CR3の画像データDの画素値の分布パターンDsにおいて、上記端部分が搬送物Pと重なる範囲から外れた位置に配置されるので、搬送物Pの検出範囲を容易に認識することができるようになることから、搬送物Pの各部の判別精度の向上が容易になるため、分類器によるデータ分類処理の分類精度を高めることができる。
本実施形態では、限定領域CR3の画像データDの画素値の分布パターンDs11〜Ds17に対応して、パターン類型PT11〜PT17を想定した。これにより、取得された画像データDを上記画素値の分布パターンDs11〜Ds17に対応する7つのパターン類型PT11〜PT17に関連付けることができる。ここで、分布パターンDs11に対応するパターン類型PT11は、限定領域CR3が横姿勢にある搬送物P1の白色部Pbと重なる場合の分布パターンに対応する。また、分布パターンDs12に対応するパターン類型PT12は、限定領域CR3が横姿勢にある搬送物P1の白色面Pbと黒色面Pcにわたり重なる場合の分布パターンに対応する。さらに、分布パターンDs13に対応するパターン類型PT13は、限定領域CR3が横姿勢にある搬送物P2の白色面Pbと重なる場合の分布パターンに対応する。また、分布パターンDs14に対応するパターン類型PT14は、限定領域CR3が縦姿勢にある搬送物P4の端子部Paと白色面Pbにわたり重なる場合の分布パターンに対応する。さらに、分布パターンDs15に対応するパターン類型PT15は、限定領域CR3が縦姿勢にある搬送物P5の端子部Paから白色面Pbと黒色面Pcにわたり重なる分布パターンに対応する。また、分布パターンDs16に対応するパターン類型PT16は、限定領域CR3が縦姿勢にある搬送物P6の端子部Paから黒色面Pcと白色面Pbにわたり重なる場合の分布パターンに対応する。さらに、分布パターンDs17に対応するパターン類型PT17は、限定領域CR3が前後の二つの搬送物の間の隙間と重なる場合の分布パターンに対応する。この分布パターンは、前後の搬送物が離れて搬送されてくる場合の隙間だけでなく、二つの搬送物が連なった状態で搬送されてくるときの前後の搬送物の当接部分であってもよい。
本実施形態においては、分類器によって分類される分類カテゴリーとして、上記パターン類型PT11〜PT13に対応する分類カテゴリーCGCと、上記パターン類型PT14〜PT16に対応する分類カテゴリーCGDと、上記パターン類型PT17に対応する分類カテゴリーCGEとを設定する。これにより、上記の限定領域CR3の画像データDは、それぞれ、検査処理ユニットDTU内の演算処理装置MPUによる上記検査処理コンポーネント内の分類ユニットの実行によって構成されるデータ分類手段である分類器によって、三つの分類カテゴリーCGC、CGD又はCGEに分類される。すなわち、本実施形態では、限定領域CR3の画像データDを、上記パターン類型PT11〜PT13に対応する分類カテゴリーCGCと、上記パターン類型PT14〜PT16に対応する分類カテゴリーCGDと、上記パターン類型PT17に対応する分類カテゴリーCGEとに分類する分類問題として処理する画像処理工程を実行する。ここで、分類カテゴリーCGCは、限定領域CR3が横向きの搬送物Pと重なる場合、すなわち横向きの搬送物P1、P2が有る場合に対応し、分類カテゴリーCGDは、限定領域CR3が縦の向きの搬送物Pと重なる場合、すなわち縦向きの搬送物P4〜P6が有る場合に対応し、分類カテゴリーCGEは、限定領域CR3が搬送物Pと重ならず、隙間と重なる場合、すなわち搬送物P1〜P6が無い場合に対応する。
このように、上記限定領域CR3の画像データDを上記分類カテゴリーCGC〜CGEに分類する分類器を図5に関して説明した内容と同等の構成によって基本設計し、学習させた学習済みモデルとして形成することにより、図6に関して説明した内容と同等の手法により分類結果E′={e1,e2,e3}を求めることができる。そして、図6について説明した判定処理の代わりに、例えば、横向きの搬送物P1〜P3が有る分類カテゴリーCGCのときと、隙間がある場合の分類カテゴリーCGEのときには、搬送物Pの排除や姿勢変更が不要であると判定して、搬送物制御処理を行わずにそのまま搬送物を通過させ、縦向きの搬送物P4〜P6がある分類カテゴリーCGDのときには、搬送物Pの排除や姿勢変更が必要であると判定して、搬送物制御処理によって、搬送物Pを搬送経路上から排除したり、或いは、搬送物Pを反転若しくは横転させたりすることによって搬送姿勢を横向きに変更する。また、搬送物制御処理において、常時は気流を噴出させた状態などの搬送物制御状態としておき、良品であると判定されたときにのみ気流の噴出を止めるなどの搬送物通過状態にすることもできる。この場合には、横向きの搬送物P1〜P3が有る分類カテゴリーCGCのときには、搬送物Pの排除や姿勢変更が不要であると判定して、搬送物制御処理を停止し、そのまま搬送物を通過させ、縦向きの搬送物P4〜P6がある分類カテゴリーCGDのときと、隙間がある場合の分類カテゴリーCGEのときには、搬送物Pの排除や姿勢変更が必要であると判定して、搬送物制御処理をそのまま続けることによって、搬送物Pを搬送経路上から排除したり、或いは、搬送物Pを横転させたりすることによって搬送姿勢を横向きに変更する。
この第2実施形態の具体的な実施例としては、入力層Iの入力数を80、出力層Oの出力数を3、中間第1層M1のユニット数を100、中間第2層M2のユニット数を120、中間第3層M3のユニット数を40、中間層の活性化関数をTanh関数とし、誤差関数を平均二乗誤差関数とした。また、学習率を0.00001、バッチサイズを32とした。学習データ及び検証データを2000個、評価データを1000個とした。実際の搬送姿勢の判定数に対する正解の搬送姿勢の数の比を分類精度とすると、学習データ及び検証データの分類精度は97%、評価データの分類精度は95.4%であった。
なお、この第2実施形態においても、第1実施形態と同様に、限定領域CR3の画像データDを分類器によりパターン類型PT11〜PT17に分類し、その後、判定処理手順(判定処理手段)により、最終的な分類カテゴリーCGC〜CGEのいずれかに判別してもよい。また、上述の第1実施形態において説明した各種の内容や他の変形例についても、この第2実施形態に適用するに支障がない限り、適宜に適用することができる。さらに、上記第1実施形態と第2実施形態のいずれにおいても、上記の制御システム或いは搬送システムにおいて、単独で用いることができるとともに、双方を用いることもできる。
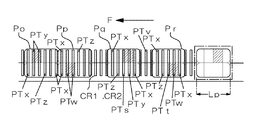
また、第1実施形態及び第2実施形態においては、いずれも、分類器により、二つの分類カテゴリーCGAとCGBに分類し、或いは、三つの分類カテゴリーCGC〜CGEに分類している。しかし、分類器により分類される分類カテゴリーは、上記の例に限らず、種々の態様に設定することができる。例えば、横姿勢の搬送物P1〜P3においては、いずれも主軸が搬送方向に沿った姿勢となっているものの、搬送物Pの前後の向きや主軸周りの回転姿勢が異なる複数の搬送姿勢が含まれる。これらの複数の搬送姿勢は、黒色層Pcの位置により判別できる。したがって、例えば、分類器において限定領域CR1、CR2の各画像データDを、前後の向きや主軸周りの回転姿勢が異なる複数の分類カテゴリーに分類し、その分類結果に応じた判定処理により、搬送物Pの上記搬送姿勢を判別するようにしてもよい。この場合、図11に示すように搬送物Pと限定領域CR1、CR2の重なりの位置関係が設定されたとすると、取得タイミングの前後の複数の画像データDのパターン類型(搬送物Pに対する限定領域CR1〜CR5の位置関係)の配列態様により、搬送物Pの搬送姿勢を判定することができる。例えば、図示例では、パターン類型の時間的配列がPTx、PTy、PTz、PTxであれば搬送物Po、PTx、PTz、PTy、PTxであれば搬送物Pp、PTx、PTz、PTw、PTxであれば搬送物Pq、PTx、PTz、PTw、PTxであれば搬送物Prである。したがって、この場合には前後4つのパターン類型の第1番目と第4番目がPTxである配列の第2番目と第3番目のパターン類型の相違により、上記4種のパターン類型のそれぞれに1対1に対応する分類カテゴリーを設定することで、上記搬送姿勢の判定が可能になる。
さらに、図11に示す例では、限定領域CR1、CR2が端子部Paと重なるパターン類型PTxの次に隙間と重なるパターン類型PTvが現れた場合には、搬送物Pが通過することとなる。また、限定領域CR1、CR2が端子部Paと重なるパターン類型PTxの次に再度、限定領域CR1、CR2が端子部Paと重なるパターン類型PTxが現れた場合も次の搬送物Pが到来したこととなる。このため、これらの場合は、いずれにしても、搬送物Pが一つ通過したことになる。したがって、前後のパターン類型PTx同士、或いは、前後のパターン類型PTxとPTvを見ることで、搬送物Pを計数することが可能である。この場合には、パターン類型PTxとPTvのそれぞれに1対1に対応する分類カテゴリーを設けることにより、判定結果を得ることが可能になる。
図12に示す例では、データ分類工程の手順は上記と同様であるが、撮影間隔Tsを図11の場合よりも小さくすることにより、端子部Paと重なるパターン類型の間に現れる、白色面Pbのみのパターン類型PTzと、白色面Pbと黒色面Pcの組み合わせのパターン類型PTy又はPTwとのいずれか一方が前後2回にわたり現れるか、或いは、二つのパターン類型PTzとPTy又はPTwとの間に中間のパターン類型PTs又はPTtが出現するように設定している。したがって、前後3つの連続するパターン類型のうちの最初と最後が上記PTzと、PTy又はPTwとのいずれか一方と他方であるとき、中間のパターン類型がPTz、PTy、PTw、PTs(PTzとPTyの中間パターン)、PTt(PTzとPTwの中間パターン)のいずれかであれば、搬送物Pの上記搬送姿勢を判定することができる。つまり、中間が最初と最後のいずれか、或いは、その中間パターンであって、最初がPTyで最後がPTzであれば搬送物Po、最初がPTwで最後がPTzであれば搬送物Pp、最初がPTzで最後がPTyであれば搬送物Pq、最初がPTzで最後がPTwであれば搬送物Prとなる。この場合には、四つのパターン類型PTz、PTy、PTw、PTs、PTtのそれぞれに1対1に対応する分類カテゴリーを設けることにより、判定結果を得ることが可能になる。
図13に示す例では、一つの取得タイミングで取得する複数の限定領域CR4、CR5を設ける例を示している。このように、一つの取得タイミングにおいて画像データDを取得する限定領域は複数存在してもよい。また、図示例では、限定領域CR4、CR5はいずれも搬送方向Fに沿って延在する。また、限定領域CR4は図示上方の側面と重なる位置に配置され、限定領域CR5は図示下方の側面と重なる位置に配置される。この場合、限定領域CR4、CR5の画像データDを、白色面Pbと黒色面Pcにわたる範囲に対応するパターン部分が含まれる画素値の分布パターンのパターン類型PTpと、白色面Pbのみに対応するパターン部分のみが含まれる画素値の分布パターンのパターン類型PTqと、それ以外のパターン類型PTrとに分類する。これにより、一つの取得タイミングの画像データDにおいて限定領域CR4,CR5により両方のパターン類型PTpとPTqが同時に見られる場合には、その組み合わせによって搬送物Po,Pp、Pq,Prの搬送姿勢を判定処理によって導出することができる。したがって、これらの同じ取得タイミングの複数の限定領域CR4,CR5の画像データDにおけるパターン類型を組み合わせることによっても、搬送物Pの搬送姿勢を判定することができる。この場合には、少なくともPTpとPTqにそれぞれ1対1に対応する分類カテゴリーを設けることにより判定が可能になる。
本実施形態では、データ分類手段(分類器)が、搬送物Pの一部のみと重なり得る範囲に設定された限定領域CRの画像データDを、画素値の分布パターンDsに応じて、複数の分類カテゴリーCGA,CGB、或いは、CGC〜CGEに分類する。これにより、分類結果として得られた分類カテゴリーのみで限定領域CRと重なる搬送物Pの状況を見極めることができる場合があり、また、分類結果に基づいてさらに所定の判定処理を行うことによって種々の判定結果を得ることもできる。後者の場合には、上述のように、前後の取得タイミングで取得された複数の限定領域CRの画像データDの分類結果に基づいて所定の判定結果を得ることができ、また、一つの取得タイミングで取得された複数の限定領域CRの画像データDの分類結果に基づいて所定の判定結果を得ることもできる。したがって、処理すべきデータ量を制限しつつ、必要な判定精度を確保することができるため、高速に判定処理を実行することができる。このため、上記搬送システムのように多数の搬送物Pを高速に供給しなければならない場合でも、正確な判定処理を容易に実現できる。
本実施形態においては、学習データを作成する場合において、限定領域CRの画像データDの上記分布パターンDsを複数のパターン類型PT1〜PT7、或いは、PT11〜PT17に関連付け、これらのパターン類型に対応させて分類カテゴリーCGA,CGB、或いは、CGC〜CGEにラベル付けしている。これにより、人手によりラベル付けを行う場合でも、画像処理により自動的なラベル付けを行う場合でも、正確かつ容易にラベル付けを行うことができる。また、このラベル付けを、限定領域CRの画像データDだけでなく、限定領域CRを含むより広範囲の画像データに基づいて行うことにより、画像データD(或いは、その分布パターンDs)には明白には認知できない情報に基づいた分類器の分類処理能力の向上(分類精度や対応力の向上)を期待することができる。
本実施形態においては、分類結果に基づく判定処理を実施する場合には、判定処理手段により、時間的又は空間的な複数の限定領域CRの画像データDの分類結果を用いて処理することにより、より広範囲かつ柔軟な判定結果を得ることができる。また、この判定処理は分類結果のみに基づいて実施されることにより、処理時間も極めて短くすることができる。
本実施形態においては、上述のように限定領域CR1〜CR5が所定の方向に延在する線状若しくは帯状の領域に設定される。これにより、搬送物Pの所定の延在方向に沿ったパターンを画像データとして取り込むことができるので、データ量を削減しつつ、搬送物に関するより多くの情報を取得できる。また、分類器などに入力する情報を一次元化することが容易になるため、分類処理のさらなる容易化と迅速化を図ることができる。特に、限定領域CR1〜3のように、搬送方向と交差(好ましくは直交)する方向に延在する線状若しくは帯状の領域とすることにより、撮影間隔や取得タイミングに対応する搬送物の厳密な位置情報をも取得することができる。また、複数の画像データDを時系列で用いることにより、搬送物の搬送姿勢や複数の搬送物の搬送状況などを正確に把握することも可能になる。
なお、本発明の搬送物の判定装置は、上述の図示例のみに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。例えば、上記各実施形態では分類器として全結合型のニューラルネットワークを用いた学習済みモデルを用いているが、ニューラルネットワークとしては、CNN(Convolutional Neural Network)、RNN(Recurrent Neural Network)などを用いることも可能である。また、分類器としては、SVM(Support Vector Machine)やRandom Forestなどのニューラルネットワーク以外の機械学習分類器を用いることもできる。
また、上記各実施形態を含むシステムでは、選別位置における選別方法として気流の吹き付けによる搬送物Pの搬送路121上からの排除を行っているが、搬送物Pの選別のための手法をはじめとして、個々の処理内容や各計測エリアの範囲については特に限定されるものではなく、機械的な排除手段を用いるなど、検出や判定のための種々の公知技術を採用することができる。また、搬送物を制御する態様としては、排除だけでなく、反転、分配などの種々の態様とすることができる。さらに、各実施形態を適用する搬送システムとしては、上記のような振動式搬送装置に限らず、他の種々の搬送装置を用いるものであってもよく、また、各実施形態を適用する制御システムとしても、何らかの搬送物Pを移動させる過程で何らかの計測を行う種々の場面に用いることができる。