JP2019209384A - ロボット - Google Patents
ロボット Download PDFInfo
- Publication number
- JP2019209384A JP2019209384A JP2018104421A JP2018104421A JP2019209384A JP 2019209384 A JP2019209384 A JP 2019209384A JP 2018104421 A JP2018104421 A JP 2018104421A JP 2018104421 A JP2018104421 A JP 2018104421A JP 2019209384 A JP2019209384 A JP 2019209384A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- arm
- motor
- piping member
- signal line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Manipulator (AREA)
- Details Of Indoor Wiring (AREA)
Abstract
Description
前記ロボットアームに配置されたセンサーと、
前記ロボットアームに配置され、前記ロボットアームを駆動する駆動部と、
前記ロボットアームに接続された配管部材と、
前記配管部材内に収納され、前記センサーから出力された信号を伝搬する第1信号線と、
前記配管部材内に収納され、前記駆動部から出力された信号を伝搬する第2信号線と、
前記配管部材の内部において前記第1信号線および前記第2信号線を一括して覆うシールドと、を備えることを特徴とする。
<実施形態>
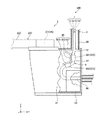
図1は、本発明のロボットの実施形態を示す側面図である。図2は、図1に示すロボットシステムのブロック図である。図3は、図1に示すロボットが備える第2アームの側面図(一部透視図)である。図4は、図1に示すロボットが備える基台の側面図(一部透視図)である。図5は、図1に示す配管部材、シールドおよび配線群の横断面図である。図6は、従来の配管部材、シールドおよび配線群の横断面図である。なお、図1では、表示装置41および入力装置42の図示は省略されている。
ロボット2の種類は、特に限定されないが、本実施形態では、ロボット2は、水平多関節ロボットの1例であるスカラロボットである。
図1に示すように、エンドエフェクター7は、力検出部290と、力検出部290に取り付けられた取り付け部71と、取り付け部71に設けられたモーター72と、モーター72の回転軸に、着脱可能に同心的に取り付けられたねじ用限界ゲージ3とを有している。このエンドエフェクター7では、力検出部290が、直接または図示しない連結部材を介して、シャフト241の先端部に着脱可能に連結される。また、シャフト241の中心軸、すなわち、第3回動軸O3と、モーター72の回転軸と、ねじ用限界ゲージ3の中心軸とは、一致している。すなわち、第3回動軸O3の軸方向から見て、第3回動軸O3と、モーター72と、ねじ用限界ゲージ3とは重なっている。
図2に示すように、制御装置1は、ロボット制御部11と、モーター制御部12(エンドエフェクター制御部)と、表示制御部13と、記憶部14と、受付部15と、判定部16とを備えており、ロボット2、エンドエフェクター7のモーター72および表示装置41等、ロボットシステム100の各部の駆動をそれぞれ制御する。
ロボット制御部11は、ロボット2の駆動、すなわち、ロボットアーム20等の駆動を制御する。ロボット制御部11は、OS等のプログラムがインストールされたコンピューターである。このロボット制御部11は、例えば、プロセッサとしてのCPUと、RAMと、プログラムが記憶されたROMとを有する。また、ロボット制御部11の機能は、例えば、CPUにより各種プログラムを実行することにより実現することができる。
モーター制御部12は、モーター72の駆動を制御する。モーター制御部12は、OS等のプログラムがインストールされたコンピューターである。このモーター制御部12は、例えば、プロセッサとしてのCPUと、RAMと、プログラムが記憶されたROMとを有する。また、モーター制御部12の機能は、例えば、CPUにより各種プログラムを実行することにより実現することができる。
表示制御部13は、表示装置41にウィンドウ等の各種の画面や文字等を表示させる機能を有している。すなわち、表示制御部13は、表示装置41の駆動を制御する。この表示制御部13の機能は、例えばGPU等により実現することができる。
記憶部14は、各種の情報(データやプログラム等を含む)を記憶する機能を有する。この記憶部14は、制御プログラム等を記憶する。記憶部14の機能は、ROM等やいわゆる外部記憶装置(図示せず)によって実現することができる。
受付部15は、入力装置42からの入力を受け付ける機能を有している。この受付部15の機能は、例えばインターフェース回路によって実現することができる。なお、例えばタッチパネルを用いる場合には、受付部15は、ユーザーの指のタッチパネルへの接触等を検知する入力検知部としての機能を有する。
表示装置41は、例えば、液晶ディスプレイ、ELディスプレイ等で構成されたモニター(図示せず)を備えており、例えば、各種の画像(ウィンドウ等の各種の画面等を含む)や文字等を表示する機能を有する。
入力装置42は、例えば、マウスやキーボード等で構成されている。したがって、ユーザーは、入力装置42を操作することで、制御装置1に対して各種の処理等の指示を行うことができる。
ロボット2では、制御装置1とロボット2とは、配線群5によって接続されている。配線群5は、モーター261と制御装置1とを接続する信号線51と、モーター271と制御装置1とを接続する信号線52と、モーター281と制御装置1とを接続する信号線53と、角速度センサー29と制御装置1とを接続する信号線54とを有している。これにより、制御装置1がロボット2を制御するための電気信号を、モーター261、モーター271、モーター281および角速度センサー29に送信することができる。
一方、被覆層82の構成材料としては、各種樹脂材料、各種ゴム材料等が挙げられる。
Claims (9)
- ロボットアームと、
前記ロボットアームに配置されたセンサーと、
前記ロボットアームに配置され、前記ロボットアームを駆動する駆動部と、
前記ロボットアームに接続された配管部材と、
前記配管部材内に収納され、前記センサーから出力された信号を伝搬する第1信号線と、
前記配管部材内に収納され、前記駆動部から出力された信号を伝搬する第2信号線と、
前記配管部材の内部において前記第1信号線および前記第2信号線を一括して覆うシールドと、を備えることを特徴とするロボット。 - 前記シールドは、前記配管部材から前記ロボットアームの内部に伸びている第1延長部を有する請求項1に記載のロボット。
- 前記第1延長部を前記ロボットアームに対して固定する第1固定部を有する請求項2に記載のロボット。
- 前記第1延長部の前記配管部材から遠位側の端部は、前記センサーと離間している請求項2または3に記載のロボット。
- 前記ロボットアームを支持し、前記配管部材の一端部が接続された基台を備え、
前記シールドは、前記配管部材から前記基台の内部に延びている第2延長部を有する請求項1ないし4のいずれか1項に記載のロボット。 - 前記第2延長部を前記基台に対して固定する第2固定部を有する請求項5に記載のロボット。
- 前記第2固定部は、前記ロボットアームの回動軸に対して傾斜している請求項6に記載のロボット。
- 前記ロボットアームは、回動可能な第1アームおよび、前記第1アームの回動軸と平行な回動軸周りで回動可能な第2アームを有し、
前記第1アームは、前記基台に支持され、
前記配管部材は、前記第2アームと前記基台とを接続する請求項5ないし7のいずれか1項に記載のロボット。 - 前記センサーは、角速度センサーである請求項1ないし8のいずれか1項に記載のロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018104421A JP7135448B2 (ja) | 2018-05-31 | 2018-05-31 | ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018104421A JP7135448B2 (ja) | 2018-05-31 | 2018-05-31 | ロボット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019209384A true JP2019209384A (ja) | 2019-12-12 |
| JP2019209384A5 JP2019209384A5 (ja) | 2021-06-10 |
| JP7135448B2 JP7135448B2 (ja) | 2022-09-13 |
Family
ID=68846180
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018104421A Active JP7135448B2 (ja) | 2018-05-31 | 2018-05-31 | ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7135448B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021122898A (ja) * | 2020-02-05 | 2021-08-30 | 芝浦機械株式会社 | ロボットシステムおよび操作装置 |
| JP2023079111A (ja) * | 2021-11-26 | 2023-06-07 | セイコーエプソン株式会社 | ロボットアームおよびロボットシステム |
| CN117182965A (zh) * | 2023-09-08 | 2023-12-08 | 重庆安汇盛科技有限公司 | 一种固线装置及机器人 |
| JP2023551675A (ja) * | 2020-11-26 | 2023-12-12 | アジール ロボッツ アーゲー | 多関節動作キネマティックシステム |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63125311U (ja) * | 1987-02-09 | 1988-08-16 | ||
| JPH06154223A (ja) * | 1992-11-25 | 1994-06-03 | Matsushita Electric Ind Co Ltd | メカニカルセクタ走査型超音波探触子用ケーブル |
| JP2002313144A (ja) * | 2001-04-09 | 2002-10-25 | Omron Corp | サーボモータシステム |
| JP2007015053A (ja) * | 2005-07-07 | 2007-01-25 | Fanuc Ltd | 産業用ロボット |
| JP2007044767A (ja) * | 2005-08-05 | 2007-02-22 | Yaskawa Electric Corp | 産業用ロボット |
| JP2008307637A (ja) * | 2007-06-14 | 2008-12-25 | Yamaha Motor Co Ltd | ロボット |
| US20110100146A1 (en) * | 2009-10-29 | 2011-05-05 | Hong Fu Jin Precision Industry (Shenzhen) Co., Ltd. | Robot arm |
| JP2012171051A (ja) * | 2011-02-22 | 2012-09-10 | Seiko Epson Corp | 水平多関節ロボット |
| JP2012232362A (ja) * | 2011-04-28 | 2012-11-29 | Seiko Epson Corp | アームカバー及びスカラ型ロボット |
| JP2013006243A (ja) * | 2011-06-24 | 2013-01-10 | Seiko Epson Corp | 水平多関節ロボット |
| JP2013099826A (ja) * | 2011-11-09 | 2013-05-23 | Mitsubishi Electric Corp | ロボット装置 |
| JP2014004638A (ja) * | 2012-06-21 | 2014-01-16 | Toshiba Mach Co Ltd | 多関節型ロボット |
| JP2017100211A (ja) * | 2015-11-30 | 2017-06-08 | 株式会社デンソーウェーブ | 水平多関節型ロボット |
-
2018
- 2018-05-31 JP JP2018104421A patent/JP7135448B2/ja active Active
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63125311U (ja) * | 1987-02-09 | 1988-08-16 | ||
| JPH06154223A (ja) * | 1992-11-25 | 1994-06-03 | Matsushita Electric Ind Co Ltd | メカニカルセクタ走査型超音波探触子用ケーブル |
| JP2002313144A (ja) * | 2001-04-09 | 2002-10-25 | Omron Corp | サーボモータシステム |
| JP2007015053A (ja) * | 2005-07-07 | 2007-01-25 | Fanuc Ltd | 産業用ロボット |
| JP2007044767A (ja) * | 2005-08-05 | 2007-02-22 | Yaskawa Electric Corp | 産業用ロボット |
| JP2008307637A (ja) * | 2007-06-14 | 2008-12-25 | Yamaha Motor Co Ltd | ロボット |
| US20110100146A1 (en) * | 2009-10-29 | 2011-05-05 | Hong Fu Jin Precision Industry (Shenzhen) Co., Ltd. | Robot arm |
| JP2012171051A (ja) * | 2011-02-22 | 2012-09-10 | Seiko Epson Corp | 水平多関節ロボット |
| JP2012232362A (ja) * | 2011-04-28 | 2012-11-29 | Seiko Epson Corp | アームカバー及びスカラ型ロボット |
| JP2013006243A (ja) * | 2011-06-24 | 2013-01-10 | Seiko Epson Corp | 水平多関節ロボット |
| JP2013099826A (ja) * | 2011-11-09 | 2013-05-23 | Mitsubishi Electric Corp | ロボット装置 |
| JP2014004638A (ja) * | 2012-06-21 | 2014-01-16 | Toshiba Mach Co Ltd | 多関節型ロボット |
| JP2017100211A (ja) * | 2015-11-30 | 2017-06-08 | 株式会社デンソーウェーブ | 水平多関節型ロボット |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021122898A (ja) * | 2020-02-05 | 2021-08-30 | 芝浦機械株式会社 | ロボットシステムおよび操作装置 |
| JP2023551675A (ja) * | 2020-11-26 | 2023-12-12 | アジール ロボッツ アーゲー | 多関節動作キネマティックシステム |
| JP2023079111A (ja) * | 2021-11-26 | 2023-06-07 | セイコーエプソン株式会社 | ロボットアームおよびロボットシステム |
| JP7809960B2 (ja) | 2021-11-26 | 2026-02-03 | セイコーエプソン株式会社 | ロボットアームおよびロボットシステム |
| CN117182965A (zh) * | 2023-09-08 | 2023-12-08 | 重庆安汇盛科技有限公司 | 一种固线装置及机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7135448B2 (ja) | 2022-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2492064B1 (en) | Horizontal articulated robot | |
| JP7135448B2 (ja) | ロボット | |
| US11161257B2 (en) | Robot | |
| JP3987845B2 (ja) | 産業用ロボットの線条体処理構造 | |
| US10189164B2 (en) | Robot, control device, and robot system | |
| CN103934831A (zh) | 机器人 | |
| WO2013157143A1 (ja) | ロボット関節構造 | |
| CN104552289A (zh) | 机器人 | |
| JP7147290B2 (ja) | ロボットおよびロボットシステム | |
| US11420326B2 (en) | Horizontal articulated robot | |
| CN104924290A (zh) | 机器人以及机器人系统 | |
| JPWO2017170305A1 (ja) | 近接センサ装置及びロボットアーム機構 | |
| CN108453716A (zh) | 机器人 | |
| CN110202611A (zh) | 机器人 | |
| JP6582520B2 (ja) | ロボット | |
| JP2020127995A (ja) | ロボットシステム、ロボットシステムの制御方法およびロボットコントローラー | |
| CN111660293B (zh) | 水平多关节机器人 | |
| JP2017131969A (ja) | ロボット | |
| CN111295270A (zh) | 机械手机构 | |
| CN112140105B (zh) | 机器人 | |
| CN111745633B (zh) | 水平多关节机器人及机器人系统 | |
| JP6277671B2 (ja) | ロボット | |
| JP7392326B2 (ja) | ロボット | |
| CN218965457U (zh) | 关节模组和腕掌关节 | |
| JP2017080856A (ja) | ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180910 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181121 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210406 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210406 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210916 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220215 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220413 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220802 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220815 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7135448 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |