JP2019508143A - 改善された喉頭鏡 - Google Patents
改善された喉頭鏡 Download PDFInfo
- Publication number
- JP2019508143A JP2019508143A JP2018545830A JP2018545830A JP2019508143A JP 2019508143 A JP2019508143 A JP 2019508143A JP 2018545830 A JP2018545830 A JP 2018545830A JP 2018545830 A JP2018545830 A JP 2018545830A JP 2019508143 A JP2019508143 A JP 2019508143A
- Authority
- JP
- Japan
- Prior art keywords
- laryngoscope
- sensor
- handle
- electronic component
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/0045—Devices for taking samples of body liquids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00066—Proximal part of endoscope body, e.g. handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00091—Nozzles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00094—Suction openings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00105—Constructional details of the endoscope body characterised by modular construction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00112—Connection or coupling means
- A61B1/00121—Connectors, fasteners and adapters, e.g. on the endoscope handle
- A61B1/00124—Connectors, fasteners and adapters, e.g. on the endoscope handle electrical, e.g. electrical plug-and-socket connection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/015—Control of fluid supply or evacuation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/267—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the respiratory tract, e.g. laryngoscopes, bronchoscopes
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Pathology (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- Otolaryngology (AREA)
- Physiology (AREA)
- Pulmonology (AREA)
- Hematology (AREA)
- Signal Processing (AREA)
- Endoscopes (AREA)
Abstract
Description
救急医療の分野では、挿管のプロセスは、血液または粘液などの過剰な流体、ならびに負傷の結果または患者の体型である解剖学的特徴の存在によって邪魔されることが多い。そのために、本明細書では、従来のツールを用いては難しいであろう臨床状況において挿管の成功という結果に向けて操作者を支援することができる改善された喉頭鏡が開示される。
本開示のある実施形態によれば、別個のブレード部分とハンドル部分とを有する喉頭鏡が開示され、ブレード部分は少なくとも1つの入口を含み、ハンドル部分は少なくとも1つの出口を含み、少なくとも1つの内部通路が、少なくとも1つの入口と少なくとも1つの出口との流体連絡のためにブレード部分内に形成され、かつハンドルの断面の少なくとも一部を通って延びるようにさらに構成され、ハンドル部分は、取り外し可能な電子部品モジュールに任意で結合されるようにサイズ決め及び成形され、取り外し可能な電子部品モジュールは、pHの検知、CO2の検知、音響の検知、静電容量の検知、インダクタンスの検知、温度の検知、特定分子の検知、両眼画像の検知、単眼画像の検知、配列された画像の検知、環境色の検知、または光を生成して周囲によって反射された光の周波数を測定すること、のうちの少なくとも1つの機能を提供する。
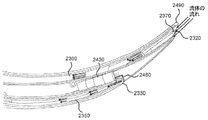
実施形態1。最上部、最下部、及び少なくとも1つの出口を含む、ハンドルと、遠位先端部及び近位部分を有し、前記近位部分は前記ハンドルの前記最下部に接続されている、ブレードと、前記ハンドル及び前記ブレードの断面の少なくとも一部を通って延びるように構成された少なくとも1つの流体チャネルと、前記ブレードの前記近位部分と前記遠位先端部との間に位置し、患者に挿管されたときに未加工データを検出するようにさらに構成された少なくとも1つのセンサと、電子部品モジュールと、を含む喉頭鏡であって、前記ブレードは、前記ハンドルから前記遠位先端部まで実質的に垂直な角度で外向きに突出するように構成され、前記ブレードは、(a)前記遠位先端部付近の少なくとも1つの入口と、(b)前記遠位先端部と近位先端部との間の少なくとも1つの入口と、をさらに含み、前記ハンドルは、前記電子部品モジュールに結合されるようにサイズ決め及び成形され、前記電子部品モジュールは、pHの検知、CO2の検知、音響の検知、静電容量の検知、インダクタンスの検知、温度の検知、特定分子の検知、両眼画像の検知、単眼画像の検知、配列された画像の検知、環境色の検知、USBビデオデバイスクラス(UVC)、光を生成してその周囲によって反射された光の周波数を測定すること、またはそれらの任意の組み合わせのうちの少なくとも1つの機能を提供する集積回路を含み、前記少なくとも1つの出口、前記遠位先端部付近の前記少なくとも1つの入口、前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口、及び前記少なくとも1つの流体チャネルは、互いに流体連絡するように構成されている、前記喉頭鏡。
開示内容ならびにその種々の特徴及び有利な詳細を、添付の図面に記載及び/または例示されて以下の説明で詳述される非限定的な実施態様及び例を参照してより十分に説明する。なお、図面に例示した特徴は必ずしも一定の比率で描かれてはおらず、ある実施態様の特徴が他の実施態様とともに用いてもよいことは、本明細書において明示的に述べられていなくても、当業者であれば分かることである。周知の構成部品及び処理技術の説明は、開示内容の実施態様を不必要に不明瞭にしないために省略する場合がある。本明細書で用いる例は単に、開示内容を実施し得る方法の理解を容易にして、さらに当業者が開示内容の実施態様を実施することを可能にすることを意図している。したがって、本明細書における例及び実施態様は、開示内容の範囲を限定するものと解釈してはならない。
Claims (64)
- 最上部、最下部、及び少なくとも1つの出口を含む、ハンドルと、
遠位先端部及び近位部分を有し、前記近位部分は前記ハンドルの前記最下部に接続されている、ブレードと、
前記ハンドル及び前記ブレードの断面の少なくとも一部を通って延びるように構成された少なくとも1つの流体チャネルと、
前記ブレードの前記近位部分と前記遠位先端部との間に位置し、患者に挿管されたときに未加工データを検出するようにさらに構成された少なくとも1つのセンサと、
電子部品モジュールと
を含む喉頭鏡であって、
前記ブレードは、前記ハンドルから前記遠位先端部まで実質的に垂直な角度で外向きに突出するように構成され、
前記ブレードは、
(a)前記遠位先端部付近の少なくとも1つの入口と、
(b)前記遠位先端部と近位先端部との間の少なくとも1つの入口と
をさらに含み、
前記ハンドルは、前記電子部品モジュールに結合されるようにサイズ決め及び成形され、
前記電子部品モジュールは、pHの検知、CO2の検知、音響の検知、静電容量の検知、インダクタンスの検知、温度の検知、特定分子の検知、両眼画像の検知、単眼画像の検知、配列された画像の検知、環境色の検知、USBビデオデバイスクラス(UVC)、光を生成してその周囲によって反射された光の周波数を測定すること、またはそれらの任意の組み合わせのうちの少なくとも1つの機能を提供する集積回路を含み、
前記少なくとも1つの出口、前記遠位先端部付近の前記少なくとも1つの入口、前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口、及び前記少なくとも1つの流体チャネルは、互いに流体連絡するように構成されている、前記喉頭鏡。 - 前記未加工データは、ビデオファイル、pHレベル、CO2レベル、温度、特定分子、気管の音、食道のより低いpH、声帯のUV反射率、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項1に記載の喉頭鏡。
- 前記ハンドル内に位置し、前記少なくとも1つの入口と、前記少なくとも1つの出口と、少なくとも1つの吸引チャネルとの間の流体連絡を制御するように構成された少なくとも1つのバルブをさらに含む、請求項1に記載の喉頭鏡。
- 前記電子部品モジュールから前記少なくとも1つのセンサまで延びるように構成された、前記ハンドル及び前記ブレード内のセンサキャビティをさらに含む、請求項1に記載の喉頭鏡。
- データを前記少なくとも1つのセンサから前記電子部品モジュールに送信するために前記電子部品モジュールを前記少なくとも1つのセンサに接続するように構成されたフレキシブルセンサチューブをさらに含む、請求項3に記載の喉頭鏡。
- 前記少なくとも1つのセンサによって検出される前記未加工データは、pH、CO2、音響、静電容量、インダクタンス、温度、特定分子、両眼画像、単眼画像、配列された画像、環境色、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項1に記載の喉頭鏡。
- 前記電子部品モジュールは、
(a)センサチューブを通して前記電子部品モジュール及び前記少なくとも1つのセンサに電力を提供するバッテリと、
(b)前記少なくとも1つのセンサから受信した前記未加工データを符号化して、符号化データをデータ処理ユニットへ送信する感覚データ符号器と、
(c)符号化データを処理する前記データ処理ユニットと、
(d)前記データ処理ユニットから処理データを受信して、前記処理データを外部ソースへ送信するように構成されたネットワーク無線機と
をさらに含む、請求項1に記載の喉頭鏡。 - 前記外部ソースは、リモートデバイス、システムコンピュータ、サーバ、データベース、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項7に記載の喉頭鏡。
- 前記ネットワーク無線機は、前記喉頭鏡の使用に関してユーザから命令を受信するように構成されている、請求項7に記載の喉頭鏡。
- 前記命令は、流体の収集を開始すること、流体の収集を停止すること、前記流体連絡を減速させること、データを送信すること、前記電子部品モジュール上の電源を入れること、前記電子部品モジュール上の電源を切ること、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項9に記載の喉頭鏡。
- 前記ハンドルは接点をさらに含む、請求項1に記載の喉頭鏡。
- 前記ブレードは、前記少なくとも1つの入口付近に誘導性検知モジュールをさらに含む、請求項11に記載の喉頭鏡。
- 前記誘導性検知モジュールは、電気リード、誘導コイル、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項12に記載の喉頭鏡。
- 前記接点及び前記誘導性検知モジュールは、前記電子部品モジュールが前記ハンドルに取り付けられたときに電気的連絡を確立するように構成されている、請求項13に記載の喉頭鏡。
- 前記電子部品モジュールは、前記ハンドルから取り外し可能であるように構成されている、請求項1に記載の喉頭鏡。
- 前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口は、前記少なくとも1つのセンサに近接近して位置している、請求項1に記載の喉頭鏡。
- 前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口は、前記少なくとも1つのセンサをクリーニングするために空気を作用させるように構成されている、請求項16に記載の喉頭鏡。
- 前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口は、前記少なくとも1つのセンサをクリーニングするために前記少なくとも1つの流体チャネルを介して前記喉頭鏡内を循環する流体を作用させるように構成されている、請求項16に記載の喉頭鏡。
- 前記集積回路は少なくとも1つの一体化ワイヤレス通信無線機を収容している、請求項1に記載の喉頭鏡。
- 前記少なくとも1つの一体化ワイヤレス通信無線機は、2.4ghz wifi周波数接続、5.0ghz wifi周波数接続、Bluetooth(登録商標)接続、アナログデータ無線接続、3gモバイルデータネットワーク接続、4gモバイルデータネットワーク接続、4gLTEモバイルデータネットワーク接続、及び5gモバイルデータネットワーク接続のうちの少なくとも1つの機能を提供するように構成されている、請求項19に記載の喉頭鏡。
- 前記集積回路は、前記少なくとも1つのセンサの出力を増幅するためのオンボード回路、前記少なくとも1つのセンサの出力を調整するためのオンボード回路、前記少なくとも1つのセンサの出力を機械可読なフォーマットに変換するためのオンボード回路、前記少なくとも1つのセンサの出力を前記喉頭鏡とは別個のリモートデバイスに物理ワイヤを介して送信するためのオンボード回路、前記少なくとも1つのセンサの出力を前記喉頭鏡とは別個のリモートデバイスに前記少なくとも1つの一体化ワイヤレス通信無線機を介して送信するためのオンボード回路、前記センサの出力を前記喉頭鏡とは別個のリモートデバイスに通信ネットワークを介して送信するためのオンボード回路、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項19に記載の喉頭鏡。
- 前記電子部品モジュールは、ハードウェアビデオ符号化、一般的なデータ処理、ファームウェアの記憶及び管理、データ暗号化、オーディオ符号化、可視スペクトル光及び不可視スペクトル光の分析、電流分析、画像深度処理、またはそれらの任意の組み合わせのうちの少なくとも1つの機能を提供するように構成された少なくとも1つのデータ処理ユニットを提供する、請求項2に記載の喉頭鏡。
- 前記データ処理ユニットのうちの少なくとも1つは、縮小命令セットコンピュータ(RISC)、Microprocessor without Interlocked Pipeline Stages(MIPS)、Advanced RISC Machine(ARM)、ARM32ビット(AArch32)、ARM64ビット(AArch64)、単一命令複数データ(SIMD)、単一命令複数スレッド(SIMT)、複数命令ストリーム複数データストリーム(MIMD)、x86、もしくはx86 Atom、またはそれらの任意の組み合わせのうちの少なくとも1つのアーキテクチャを利用する、請求項22に記載の喉頭鏡。
- 前記少なくとも1つのデータ処理ユニットは、前記未加工データを、MJPEG、H.264、HEVC、H.265、もしくはMPEG−4、またはそれらの任意の組み合わせのうちの少なくとも1つのコーデック標準に符号化する、請求項23に記載の喉頭鏡。
- 前記未加工データは一体化ハードウェア符号器を用いて符号化される、請求項22に記載の喉頭鏡。
- 前記集積回路は、前記少なくとも1つのセンサの電力消費の必要性のためのオンボードバッテリを含む、請求項1に記載の喉頭鏡。
- 前記電子部品モジュールは、前記喉頭鏡とは別個のデバイスから電力を受け取るための別個の導体を含む、請求項1に記載の喉頭鏡。
- LED、照明導体、またはそれらの任意の組み合わせのうちの少なくとも1つをさらに含む、請求項1に記載の喉頭鏡。
- 前記LEDは前記電子部品モジュールとは独立して機能する、請求項1に記載の喉頭鏡。
- 前記電子部品モジュールは、前記LED、前記照明導体、またはそれらの任意の組み合わせのうちの少なくとも1つから電流を引き込むように構成されている、請求項28に記載の喉頭鏡。
- 前記電子部品モジュールは、前記喉頭鏡のハンドルに結合されるようにサイズ決め及び成形されるように構成されている、請求項1に記載の喉頭鏡。
- 前記電子部品モジュールは、前記ハンドルの前記最下部に結合されるようにサイズ決め及び成形されている、請求項1に記載の喉頭鏡。
- 前記電子部品モジュールは、前記ハンドル上に配置されたドアを介して前記喉頭鏡に結合されるように構成され、それによって内部のキャビティを露出させている、請求項1に記載の喉頭鏡。
- 前記ドアと前記ハンドルとの結合は、取り外し可能なドア、スライディングドア、機械的にヒンジで連結されたドア、またはリビングヒンジで連結された(live hinged)ドアのうちの1つから選択される、請求項33に記載の喉頭鏡。
- 前記ハンドルは、移動可能な進入面を前記ハンドルの外面上に含み、そのため、前記電子部品モジュールが前記進入面に対して付勢されたときに、前記ハンドル内に配置された相補的な嵌合メカニズムに前記電子部品モジュールが結合されるまで前記進入面及び電子部品モジュールが前記ハンドル内へと平行移動し、それによって前記電子部品モジュールが前記ハンドルに機械的に結合される、請求項1に記載の喉頭鏡。
- 前記ブレードはヒンジで連結され、それによって従来の喉頭鏡または高角度の喉頭鏡のいずれかとして構成され得る、請求項1に記載の喉頭鏡。
- 前記ヒンジ連結は、前記電子部品モジュールの存在によって調整される、請求項36に記載の喉頭鏡。
- 前記ヒンジ連結は、前記電子部品モジュールの非存在によって調整される、請求項36に記載の喉頭鏡。
- 前記ヒンジ連結は、前記少なくとも1つのセンサによって過剰な流体が検出されると調整される、請求項36に記載の喉頭鏡。
- 前記ヒンジ連結は、前記少なくとも1つのセンサによって前記患者内の異常な解剖学的構造が検出されると調整される、請求項36に記載の喉頭鏡。
- 前記特定分子検知機能は、O2、N2、CO2、HCl、NaCl、及びKClのうちの少なくとも1つを認識するように構成された前記少なくとも1つのセンサを用いて実現される、請求項1に記載の喉頭鏡。
- 前記少なくとも1つのセンサは、接触センサ、存在する周囲のガスを測定するためのセンサ、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項41に記載の喉頭鏡。
- 前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口は、前記少なくとも1つのセンサが流体または組織によって覆われたときに前記少なくとも1つの出口に真空を適用することによって前記少なくとも1つのセンサを清掃するように方向付けられている、請求項1に記載の喉頭鏡。
- 前記電子部品モジュールは、前記少なくとも1つのセンサが検出した前記未加工データに基づいて前記患者内の少なくとも1つの解剖学的マーカーを特定する視覚フィードバックを生成することができる、請求項2に記載の喉頭鏡。
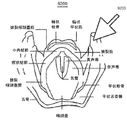
- 前記解剖学的マーカーは、臼歯、軟口蓋、口蓋舌弓、口蓋垂、口蓋扁桃、口蓋咽頭弓、中咽頭、喉頭蓋、食道、声門、楔状結節、小角結節(conciculate tubercle)、真声帯、仮声帯、開いた声帯、閉じた声帯、またはそれらの任意の組み合わせのうちの少なくとも1つを含む、請求項44に記載の喉頭鏡。
- 前記電子部品モジュールは、前記少なくとも1つのセンサのうちの2つ以上からの未加工データを統合して、前記ブレードが前記患者内の所与の解剖学的マーカー内にあることの確実性を向上させることができる、請求項44に記載の喉頭鏡。
- 前記視覚フィードバックを表示するための視覚ディスプレイである、照光LED、選択的照光LEDアレイ、無反射型eインク型ディスプレイ、または反射型LCD型ディスプレイのうちの少なくとも1つをさらに含む、請求項44に記載の喉頭鏡。
- 前記電子部品モジュールは、リモートデバイス、サーバ、データベース、システムコンピュータ、またはそれらの任意の組み合わせのうちの少なくとも1つに前記視覚フィードバックを送信するように構成されている、請求項44に記載の喉頭鏡。
- 前記視覚フィードバックは、前記ブレードの前記先端部付近のカメラからのライブ画像上のオーバーレイとして提供される、請求項48に記載の喉頭鏡。
- 前記視覚フィードバックは、解剖学的特徴及び前記患者内で前記ブレードがたどるべき進路のライブワイヤーフレーム型アウトラインを提供することによって提供される、請求項49に記載の喉頭鏡。
- 前記視覚フィードバックは、ユーザが前記喉頭鏡を挿管が成功する進路に向けて前記患者内で導くことを助けるように、ユーザインターフェース内に表示される、請求項44に記載の喉頭鏡。
- 電子センサモジュールは、前記集積回路を管理するためにLinux(登録商標)組込み開発環境(Linux(登録商標) Embedded Development Environment(LEDE))を用いる、請求項1に記載の喉頭鏡。
- 測定し少なくとも1つの出力信号を送信する喉頭鏡と、
前記喉頭鏡から前記少なくとも1つの出力信号を受信して、前記少なくとも1つの出力信号をリアルタイムで表示するように構成されたコンピューティングデバイスと、
ユーザが前記少なくとも1つの出力信号をモニタするためのオプションを見てカスタマイズすることを可能にする、前記コンピューティングデバイス上のグラフィカルユーザインターフェースと
を含む、喉頭鏡の挿管のためのシステムであって、
前記喉頭鏡と前記コンピューティングデバイスとは通信ネットワークを介して互いに通信可能に接続されている、前記システム。 - 前記喉頭鏡は、
最上部、最下部、及び少なくとも1つの出口を含む、ハンドルと、
遠位先端部及び近位部分を有し、前記近位部分は前記ハンドルの前記最下部に接続されている、ブレードと、
前記ハンドル及び前記ブレードの断面の少なくとも一部を通って延びるように構成された少なくとも1つの吸引チャネルと、
前記ブレードの前記近位部分と前記遠位先端部との間に位置し、患者に挿管されたときに未加工データを検出するようにさらに構成された少なくとも1つのセンサと、
前記未加工データを前記少なくとも1つの出力に変換するように構成された電子部品モジュールと
を含み、
前記ブレードは、前記ハンドルから前記遠位先端部まで実質的に垂直な角度で外向きに突出するように構成され、
前記ブレードは、
(a)前記遠位先端部付近の少なくとも1つの入口と、
(b)前記遠位先端部と近位先端部との間の少なくとも1つの入口と
をさらに含み、
前記ハンドルは、前記電子部品モジュールに結合されるようにサイズ決め及び成形され、
前記電子部品モジュールは集積回路を含み、
前記少なくとも1つの出口、前記遠位先端部付近の前記少なくとも1つの入口、前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口、及び少なくとも1つの流体チャネルは、互いに流体連絡するように構成されている、請求項53に記載のシステム。 - (i)前記少なくとも1つの出力信号を記憶して分析するように構成され、かつ
(ii)前記通信ネットワークを介してローカルデバイス及び前記コンピューティングデバイスに接続される
ホスト型サーバをさらに含む、請求項53に記載のシステム。 - 前記ホスト型サーバは、
(i)患者内での前記喉頭鏡の現在の解剖学的位置を決定するように、
(ii)前記患者内の好ましい解剖学的位置までの経路を決定するように、かつ
(iii)ユーザが前記喉頭鏡を前記好ましい解剖学的位置まで導くことができるよう前記ユーザが従うべきデジタルガイダンスを提供するように
さらに構成されている、請求項55に記載のシステム。 - 前記現在の解剖学的位置、前記好ましい解剖学的位置、前記好ましい解剖学的位置までの前記経路、及び前記デジタルガイダンスは、確率アルゴリズム、機械学習アルゴリズム、またはそれらの組み合わせのうちの少なくとも1つによって決定される、請求項55に記載のシステム。
- 確率アルゴリズムまたは機械学習アルゴリズムは前記コンピューティングデバイス内に記憶されている、請求項57に記載のシステム。
- 確率アルゴリズムまたは機械学習アルゴリズムは前記喉頭鏡内に記憶されている、請求項57に記載のシステム。
- 前記集積回路は、pHの検知、CO2の検知、音響の検知、静電容量の検知、インダクタンスの検知、温度の検知、特定分子の検知、両眼画像の検知、単眼画像の検知、配列された画像の検知、環境色の検知、USBビデオデバイスクラス(UVC)、光を生成してその周囲によって反射された光の周波数を測定すること、またはそれらの任意の組み合わせのうちの少なくとも1つの機能を提供する、請求項54に記載のシステム。
- 最上部、最下部、及び少なくとも1つの出口を含む、ハンドルと、
遠位先端部及び近位部分を有し、前記近位部分は前記ハンドルの前記最下部に接続されている、ブレードと、
前記ハンドル及び前記ブレードの断面の少なくとも一部を通って延びるように構成された少なくとも1つの流体チャネルと、
前記ブレードの前記近位部分と前記遠位先端部との間に位置し、患者に挿管されたときに未加工データを検出するようにさらに構成された少なくとも1つのセンサと、
電子部品モジュールと
を含む喉頭鏡であって、
前記ブレードは、前記ハンドルから前記遠位先端部まで実質的に垂直な角度で外向きに突出するように構成され、
前記ブレードは、
(a)前記遠位先端部付近の少なくとも1つの入口と、
(b)前記遠位先端部と近位先端部との間の少なくとも1つの入口と
をさらに含み、
前記ハンドルは、前記電子部品モジュールに結合されるようにサイズ決め及び成形され、
前記電子部品モジュールは少なくとも1つの集積回路を含み、
前記少なくとも1つの出口、前記遠位先端部付近の前記少なくとも1つの入口、前記遠位先端部と前記近位先端部との間の前記少なくとも1つの入口、及び前記少なくとも1つの流体チャネルは、互いに流体連絡するように構成されている、前記喉頭鏡。 - 前記少なくとも1つの集積回路は、pHの検知、CO2の検知、音響の検知、静電容量の検知、インダクタンスの検知、温度の検知、特定分子の検知、両眼画像の検知、単眼画像の検知、配列された画像の検知、環境色の検知、USBビデオデバイスクラス(UVC)、光を生成してその周囲によって反射された光の周波数を測定すること、またはそれらの任意の組み合わせのうちの少なくとも1つの機能を提供する、請求項61に記載の喉頭鏡。
- コンピュータ可読命令を有するコンピュータ可読プログラムコードを有形に具現化するコンピュータ可読記憶媒体であって、前記コンピュータ可読命令は、実行されると、
喉頭鏡がユーザによって患者に挿管されたときに前記喉頭鏡上の少なくとも1つのセンサによって前記患者の少なくとも1つの解剖学的特徴を検出するステップと、
前記少なくとも1つの解剖学的特徴を電子部品モジュールに送信するステップと、
前記電子部品モジュールによって前記患者内での前記喉頭鏡の好ましい経路を決定するステップと、
前記好ましい経路を、グラフィックユーザインターフェース上に解剖学的オーバーレイとして表示されるようにリモートデバイスに送るステップと、
前記解剖学的オーバーレイにより前記喉頭鏡を前記患者内の前記好ましい経路に設けるステップと
をコンピュータに行わせる、前記コンピュータ可読記憶媒体。 - 前記少なくとも1つの解剖学的特徴は、pH、CO2、音響、静電容量、インダクタンス、温度、特定分子、両眼画像、単眼画像、配列された画像、環境色などのうちの少なくとも1つを含む、請求項63に記載の方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662301635P | 2016-03-01 | 2016-03-01 | |
| US201662301634P | 2016-03-01 | 2016-03-01 | |
| US62/301,634 | 2016-03-01 | ||
| US62/301,635 | 2016-03-01 | ||
| PCT/US2017/020242 WO2017151796A1 (en) | 2016-03-01 | 2017-03-01 | Improved laryngoscope |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019508143A true JP2019508143A (ja) | 2019-03-28 |
Family
ID=59744407
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018545830A Pending JP2019508143A (ja) | 2016-03-01 | 2017-03-01 | 改善された喉頭鏡 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11064877B2 (ja) |
| EP (1) | EP3422925A4 (ja) |
| JP (1) | JP2019508143A (ja) |
| CN (1) | CN108697318A (ja) |
| CA (1) | CA3015226A1 (ja) |
| MX (1) | MX2018010350A (ja) |
| WO (1) | WO2017151796A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114599264A (zh) * | 2019-10-22 | 2022-06-07 | 梅德斯尼佩尔有限责任公司 | 用于经口气管插管的喉镜 |
| JP2023532751A (ja) * | 2020-07-06 | 2023-07-31 | パヴィスス アーエス | ビデオ喉頭鏡デバイス |
| JP2023545637A (ja) * | 2019-03-21 | 2023-10-31 | ザ ブリガム アンド ウィメンズ ホスピタル インコーポレイテッド | ロボット人工知能による経鼻/経口/経直腸の腸内チューブ |
| JP2024546715A (ja) * | 2021-12-10 | 2024-12-26 | 稼志 曾 | 気管挿管画像の処理方法とシステム、並びに気管挿管の効果評価方法 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10709322B2 (en) | 2014-01-31 | 2020-07-14 | University Of Louisville Research Foundation, Inc. | Laryngoscope with integrated and controllable suction |
| EP3331420A4 (en) | 2015-08-05 | 2020-02-05 | Inscope Medical Solutions, Inc. | MEDICAL DEVICE WITH ELEMENT FOR INSERTION IN THE RESPIRATORY TRACT |
| JP2019508143A (ja) | 2016-03-01 | 2019-03-28 | インスコープ メディカル ソリューションズ インコーポレイテッド | 改善された喉頭鏡 |
| BR102017022831A2 (pt) * | 2017-10-23 | 2019-05-07 | Gilberto Clemente Pereira | Laringoscópio mecânico com mecanismo automático ou manual de alavancas para facilitação da intubação traqueal |
| JP7037410B2 (ja) * | 2018-03-28 | 2022-03-16 | 日本光電工業株式会社 | 挿管システム |
| JP7368074B2 (ja) | 2018-03-28 | 2023-10-24 | 日本光電工業株式会社 | 挿管装置 |
| CN110478584B (zh) * | 2019-09-25 | 2024-12-24 | 合肥达米医疗科技有限公司 | 一种具有pH和温度监测功能的集成式智能喉罩 |
| CN110575592B (zh) * | 2019-09-25 | 2024-08-23 | 夏敏 | 一种具有喉周肌松监测及返流监测的喉罩 |
| WO2021133936A1 (en) * | 2019-12-23 | 2021-07-01 | The Trustees Of Columbia University In The City Of New York | A medical apparatus for insertion into a body passage and methods for use |
| CN118369037A (zh) * | 2021-12-10 | 2024-07-19 | 柯惠有限合伙公司 | 用于视频喉镜的图像引导的导航系统 |
| CN116328130A (zh) * | 2021-12-24 | 2023-06-27 | 上海兰甲医疗科技有限公司 | 一种高位可视喉罩 |
| US11832800B2 (en) | 2022-02-09 | 2023-12-05 | Visurraga Enterprises Llc | Medical visualization and intubation systems |
| CN115517617B (zh) * | 2022-03-29 | 2026-02-17 | 深圳市三平影像科技有限公司 | 一种吸附力可调式电子喉镜及吸附力调节方法 |
| US20250127496A1 (en) * | 2023-10-23 | 2025-04-24 | Robert Kanas | Tonsillar Oropharyngeal Lavage Device For Early HPV Associated Oropharynheal Cancer Detection |
| CN117503039B (zh) | 2024-01-08 | 2024-04-12 | 北京大学第三医院(北京大学第三临床医学院) | 弧形电动喉镜 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04357927A (ja) * | 1991-01-14 | 1992-12-10 | Olympus Optical Co Ltd | 画像表示装置 |
| WO2003068056A1 (en) * | 2002-02-15 | 2003-08-21 | Yoshinori Iwase | Laryngoscope |
| JP2005538779A (ja) * | 2002-09-13 | 2005-12-22 | カール ストルツ イメージング インコーポレイテッド | 映像記録・画像キャプチャ装置 |
| JP2008253783A (ja) * | 2007-04-04 | 2008-10-23 | Karl Storz Endovision Inc | ビデオブレード喉頭鏡 |
| JP2009519786A (ja) * | 2005-12-19 | 2009-05-21 | テックミン ピーティーワイ リミテッド | 誘導コイル検出 |
| JP2010528820A (ja) * | 2007-06-12 | 2010-08-26 | エーブイエヌ・メディカル・テクノロジーズ,エルエルシー | 気道管理 |
| US20110263935A1 (en) * | 2010-04-21 | 2011-10-27 | Chunyuan Qiu | Intubation systems and methods based on airway pattern identification |
| JP2012506749A (ja) * | 2008-10-30 | 2012-03-22 | インディアン オーシャン メディカル インコーポレイテッド | 喉頭鏡 |
| JP2012523944A (ja) * | 2009-04-20 | 2012-10-11 | エンビジョニア メディカル テクノロジーズ インコーポレイテッド | 撮像システム |
| JP2013512046A (ja) * | 2009-11-30 | 2013-04-11 | キング システムズ コーポレイション | 映像化装置 |
| US20140194684A1 (en) * | 2011-06-15 | 2014-07-10 | Medizinische Hochschule Hannover | Medical Device for Conducting a Medical Examination and/or Intervention Within a Human or Animal Body |
| WO2015116900A1 (en) * | 2014-01-31 | 2015-08-06 | University Of Louisville Research Foundation, Inc. | Laryngoscope with integrated and controllable suction |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3848587A (en) | 1972-11-21 | 1974-11-19 | B Mcdonald | Ear, nose and throat examining instrument |
| US5702351A (en) | 1995-08-23 | 1997-12-30 | Bar-Or; David | Laryngoscope and disposable blade therefor |
| US5897489A (en) | 1997-05-27 | 1999-04-27 | Urbanowicz; Cynthia | Snap-on suction tube for laryngoscope |
| US6543447B2 (en) | 1997-12-01 | 2003-04-08 | Saturn Biomedical Systems Inc | Intubation instrument |
| US8636648B2 (en) * | 1999-03-01 | 2014-01-28 | West View Research, Llc | Endoscopic smart probe |
| US6652453B2 (en) | 1999-03-03 | 2003-11-25 | Vincent A. Smith | Portable video laryngoscope |
| US6679834B2 (en) | 2000-09-22 | 2004-01-20 | Pilling Weck Incorporated | Endoscopic suction-irrigation instrument for surgery |
| US7608040B1 (en) | 2003-02-24 | 2009-10-27 | City Of Hope | Device to aid in placing tracheal tubes |
| US8827899B2 (en) | 2004-09-24 | 2014-09-09 | Vivid Medical, Inc. | Disposable endoscopic access device and portable display |
| US20070287888A1 (en) | 2006-06-09 | 2007-12-13 | Dp Medical | Integrated laryngoscope and suction device |
| US8419634B2 (en) * | 2007-06-12 | 2013-04-16 | University Hospitals Of Cleveland | Apparatus and method for airway management |
| US8998804B2 (en) | 2008-11-12 | 2015-04-07 | Board Of Regents Of The University Of Nebraska | Suction catheter assembly for a laryngoscope |
| US8814787B2 (en) | 2009-04-02 | 2014-08-26 | University of Pittsburgh—of the Commonwealth System of Higher Education | Articulating laryngoscope |
| US8548564B2 (en) | 2009-04-03 | 2013-10-01 | Covidien Lp | Tracheal tube locating system and method |
| CA2758516A1 (en) | 2009-04-14 | 2010-10-21 | Verathon Inc. | Video laryngoscope system and devices |
| US9320420B2 (en) | 2009-10-21 | 2016-04-26 | Rachel A. Goldstein | Video laryngoscope providing suction |
| WO2011060447A1 (en) | 2009-11-16 | 2011-05-19 | Verathon Inc. | Channel laryngoscopes and systems |
| US9445714B2 (en) | 2010-03-29 | 2016-09-20 | Endoclear Llc | Endotracheal tube coupling adapters |
| US9314151B2 (en) | 2010-05-13 | 2016-04-19 | Aircraft Medical Limited | Laryngoscopes, laryngoscope arms and methods of manufacture |
| US9622651B2 (en) | 2012-01-27 | 2017-04-18 | Kbport Llc | Wireless laryngoscope simulator with onboard event recording adapted for laryngoscopy training |
| WO2014105649A1 (en) * | 2012-12-26 | 2014-07-03 | Ecoclinix, Inc. | Transformable medical device |
| US20160000300A1 (en) * | 2014-07-07 | 2016-01-07 | Integrated Medical Systems International, Inc. | System and Method for Wirelessly Transmitting Operational Data From an Endoscope to a Remote Device |
| EP3331420A4 (en) | 2015-08-05 | 2020-02-05 | Inscope Medical Solutions, Inc. | MEDICAL DEVICE WITH ELEMENT FOR INSERTION IN THE RESPIRATORY TRACT |
| JP2019508143A (ja) | 2016-03-01 | 2019-03-28 | インスコープ メディカル ソリューションズ インコーポレイテッド | 改善された喉頭鏡 |
-
2017
- 2017-03-01 JP JP2018545830A patent/JP2019508143A/ja active Pending
- 2017-03-01 CN CN201780011991.5A patent/CN108697318A/zh active Pending
- 2017-03-01 CA CA3015226A patent/CA3015226A1/en not_active Abandoned
- 2017-03-01 EP EP17760734.8A patent/EP3422925A4/en not_active Withdrawn
- 2017-03-01 MX MX2018010350A patent/MX2018010350A/es unknown
- 2017-03-01 WO PCT/US2017/020242 patent/WO2017151796A1/en not_active Ceased
- 2017-03-01 US US16/071,412 patent/US11064877B2/en not_active Expired - Fee Related
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04357927A (ja) * | 1991-01-14 | 1992-12-10 | Olympus Optical Co Ltd | 画像表示装置 |
| WO2003068056A1 (en) * | 2002-02-15 | 2003-08-21 | Yoshinori Iwase | Laryngoscope |
| JP2005538779A (ja) * | 2002-09-13 | 2005-12-22 | カール ストルツ イメージング インコーポレイテッド | 映像記録・画像キャプチャ装置 |
| JP2009519786A (ja) * | 2005-12-19 | 2009-05-21 | テックミン ピーティーワイ リミテッド | 誘導コイル検出 |
| JP2008253783A (ja) * | 2007-04-04 | 2008-10-23 | Karl Storz Endovision Inc | ビデオブレード喉頭鏡 |
| JP2010528820A (ja) * | 2007-06-12 | 2010-08-26 | エーブイエヌ・メディカル・テクノロジーズ,エルエルシー | 気道管理 |
| JP2012506749A (ja) * | 2008-10-30 | 2012-03-22 | インディアン オーシャン メディカル インコーポレイテッド | 喉頭鏡 |
| JP2012523944A (ja) * | 2009-04-20 | 2012-10-11 | エンビジョニア メディカル テクノロジーズ インコーポレイテッド | 撮像システム |
| JP2013512046A (ja) * | 2009-11-30 | 2013-04-11 | キング システムズ コーポレイション | 映像化装置 |
| US20110263935A1 (en) * | 2010-04-21 | 2011-10-27 | Chunyuan Qiu | Intubation systems and methods based on airway pattern identification |
| US20140194684A1 (en) * | 2011-06-15 | 2014-07-10 | Medizinische Hochschule Hannover | Medical Device for Conducting a Medical Examination and/or Intervention Within a Human or Animal Body |
| WO2015116900A1 (en) * | 2014-01-31 | 2015-08-06 | University Of Louisville Research Foundation, Inc. | Laryngoscope with integrated and controllable suction |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023545637A (ja) * | 2019-03-21 | 2023-10-31 | ザ ブリガム アンド ウィメンズ ホスピタル インコーポレイテッド | ロボット人工知能による経鼻/経口/経直腸の腸内チューブ |
| CN114599264A (zh) * | 2019-10-22 | 2022-06-07 | 梅德斯尼佩尔有限责任公司 | 用于经口气管插管的喉镜 |
| JP2022552769A (ja) * | 2019-10-22 | 2022-12-20 | メドスナイパー エス.アール.エル. | 経口気管挿管用の喉頭鏡 |
| JP7585597B2 (ja) | 2019-10-22 | 2024-11-19 | メドスナイパー エス.アール.エル. | 経口気管挿管用の喉頭鏡 |
| JP2023532751A (ja) * | 2020-07-06 | 2023-07-31 | パヴィスス アーエス | ビデオ喉頭鏡デバイス |
| JP2024546715A (ja) * | 2021-12-10 | 2024-12-26 | 稼志 曾 | 気管挿管画像の処理方法とシステム、並びに気管挿管の効果評価方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200170498A1 (en) | 2020-06-04 |
| MX2018010350A (es) | 2018-11-09 |
| CN108697318A (zh) | 2018-10-23 |
| EP3422925A4 (en) | 2019-10-30 |
| CA3015226A1 (en) | 2017-09-08 |
| EP3422925A1 (en) | 2019-01-09 |
| WO2017151796A1 (en) | 2017-09-08 |
| US11064877B2 (en) | 2021-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019508143A (ja) | 改善された喉頭鏡 | |
| US8423123B2 (en) | System and method for in-vivo feature detection | |
| US20220047160A1 (en) | Ceiling ai health monitoring apparatus and remote medical-diagnosis method using the same | |
| CN107115123B (zh) | 用于远程地调整声音采集传感器参数的系统和方法 | |
| EP2185058A2 (en) | Capsule-type endoscope capable of controlling frame rate of image | |
| JP5873230B2 (ja) | 生体内撮像デバイスおよび生体内撮像デバイスの作動方法 | |
| US20090023993A1 (en) | System and method for combined display of medical devices | |
| US8854444B2 (en) | Information processing apparatus and capsule endoscope system | |
| KR102268759B1 (ko) | 피부 상태 측정 및 케어용 디바이스, 및 이를 포함하는 피부 상태 측정 및 케어 시스템 | |
| US20070078300A1 (en) | System and method for detecting content in-vivo | |
| CN112020321A (zh) | 医学成像系统和用于检测其位置的方法 | |
| CN113365545A (zh) | 图像记录装置、图像记录方法和图像记录程序 | |
| WO2007036941A2 (en) | System and method for detecting content in-vivo | |
| US12419509B1 (en) | Camera accessory device for a laryngoscope and an artificial intelligence and pattern recognition system using the collected images | |
| US20210259623A1 (en) | Monitoring swallowing in a subject | |
| US11627243B2 (en) | Handheld wireless endoscope image streaming apparatus | |
| EP4391727A1 (en) | Light pollution reduction techniques for medical environments | |
| KR200487869Y1 (ko) | 보관 트레이를 구비한 휴대용 내시경 | |
| CN120858411A (zh) | 计算机辅助诊断系统 | |
| KR100907487B1 (ko) | 내시경 장치 및 이를 이용한 진단 시스템 | |
| US11925331B2 (en) | Camera accessory device for a laryngoscope and an artificial intelligence and pattern recognition system using the collected images | |
| Lee | Application of Artificial Intelligence (AI) in Laryngeal Cancer | |
| WO2024177848A1 (en) | Automatic annotation of endoscopic videos | |
| WO2025024498A1 (en) | Combined source algorithm models | |
| CN120391960A (zh) | 内窥镜视频时间轴兴趣水平预测 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180831 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200214 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210118 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210308 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210415 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210922 |