JP2020174852A - 対物レンズおよび該対物レンズを備える眼底撮影装置 - Google Patents
対物レンズおよび該対物レンズを備える眼底撮影装置 Download PDFInfo
- Publication number
- JP2020174852A JP2020174852A JP2019078641A JP2019078641A JP2020174852A JP 2020174852 A JP2020174852 A JP 2020174852A JP 2019078641 A JP2019078641 A JP 2019078641A JP 2019078641 A JP2019078641 A JP 2019078641A JP 2020174852 A JP2020174852 A JP 2020174852A
- Authority
- JP
- Japan
- Prior art keywords
- lens
- objective lens
- light
- inspected
- eye
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Landscapes
- Eye Examination Apparatus (AREA)
Abstract
【課題】低コストかつコンパクトな構成の光学系で、広画角な眼底画像を取得する。【解決手段】撮影画角θの眼底撮影装置に具備される対物レンズにおいて、単凸レンズ又は2枚接合の凸レンズからなり、被検眼側の第一面の曲率半径r1と最終面の曲率半径r2の比をRr、凸レンズが単凸レンズの場合の屈折率又は凸レンズが2枚接合レンズの場合の等価屈折率をn、対物レンズが所定の差動距離に置かれた場合の被検眼の瞳の結像倍率をPm、とした場合、θ>80°、Pm<4.5、3.0<Rr かつ[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<2.0を満たす。【選択図】図1
Description
本発明は、被検眼の眼底等の画像の取得に用いられる眼底撮影装置に具備される対物レンズ、および該対物レンズを備えた眼底撮影装置に関する。
現在、低コヒーレント光による干渉を利用した光干渉断層法(OCT:OpticalCoherence Tomography)を用いる撮像装置(以下、OCT装置)が実用化されている。該OCT装置は、被検査物の断層画像を高解像度で撮影することができる。
OCT装置において、光源からの光は、ビームスプリッタ等により測定光と参照光とに分けられる。測定光は、測定光路を介して眼等の被検査物に照射される。そして、被検査物からの戻り光は参照光と合波され、干渉光として検出光路を介して検出器に導かれる。なお、ここで述べる戻り光とは、被検査物に対する光の照射方向における界面に関する情報等が含まれる反射光や散乱光のことである。戻り光と参照光との干渉光を検出器で検出し、解析することによって被検査物の断層画像を得ることができる。このため、OCT装置は、被検眼の例えば網膜の断層画像を撮影できる眼底撮影装置として、眼科の分野で用いられる。
また、眼科の分野において、レーザ走査により被検眼を撮影する走査レーザ検眼鏡(SLO:Scanning Laser Ophthalmoscope、以下、SLO装置)が実用化されている。SLO装置によれば、被検眼の例えば眼底の表面画像を高解像度で撮影することができる。
SLO装置において、光源からの光は、ガルバノミラー等により、被検眼上を走査して照射される。被検眼からの反射光は、穴開きミラー等により照明光路と分離され、検出器へ導かれる。検出器で反射光の強度を検出することによって、被検眼の二次元表面画像を得ることができる。
ここで、近年のOCT装置やSLO装置等を用いた眼底検査では、疾患により、眼底の周辺部まで含むよう広範囲を撮影することが求められている。広範囲を撮影可能な広画角用の眼底撮影装置としては、例えば特許文献1に開示されるものが知られている。特許文献1に開示される構成では、装置本体と広角レンズアタッチメントを備えており、広角レンズアタッチメントを装置本体に装着することによって、得られる眼底画像の撮影画角を広角化させている。
光学系を広画角化するためには、装置本体の対物光学系或いはレンズアタッチメント等の対物光学系のレンズの焦点距離を短くすることが考えられる。焦点距離を短くする簡単な方法としては、レンズの曲率半径を小さくすることが考えられるが、この方法によればレンズ端面部の厚みが非常に薄くなってしまう。レンズ端面部の厚みが薄くなると、光学系として使用する光学有効面に触れずにレンズを扱うことが困難になり、レンズの加工や組立の工程の難度が上昇する。その結果、例えばレンズの加工や組立の工数の増加や、特殊な冶具の使用が必要となり、レンズの加工や組立のコストが増加する。
一方、レンズ端面部の厚みを確保するためには、光学系を全体に拡大する設計も考えられる。例えば、レンズ端面部の厚みが1mmのレンズの場合、レンズ全体を2倍に拡大するとレンズ端面部の厚みは2mmになり、レンズ全体を3倍に拡大するとレンズ端面部の厚みは3mmになる。しかし、光学系が大型化すると、それに伴い装置全体も大型化するため、コンパクトな装置構成とすることが困難になる。また、光学系を全体には拡大せず、レンズの厚みを厚くする設計も考えられる。しかし、レンズを厚くすると、被検眼の瞳孔と対物レンズとの距離(ワーキングディスタンス)が確保しにくくなる。この場合、対物レンズと被検眼が物理的に干渉しやすくなり、被検眼に対する装置のアライメントや撮影が困難になる。
本発明は以上の状況に鑑みて為されたものであって、低コストかつコンパクトな構成の光学系で広画角な眼底画像の取得を可能とすることを目的の一つとする。
上記課題を解決するため、本発明の一態様に係る対物レンズは、
撮影画角θの眼底撮影装置に具備される対物レンズであって、
単凸レンズ又は2枚接合の凸レンズからなり、
被検眼側の第一面の曲率半径r1と最終面の曲率半径r2の比をRr、
前記凸レンズが単凸レンズの場合の屈折率又は前記凸レンズが2枚接合レンズの場合の等価屈折率をn、
前記対物レンズが所定の差動距離に置かれた場合の被検眼の瞳の結像倍率をPm、とした場合、
θ>80°、Pm<4.5、3.0<Rr かつ
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<2.0
を満たすことを特徴とする。
撮影画角θの眼底撮影装置に具備される対物レンズであって、
単凸レンズ又は2枚接合の凸レンズからなり、
被検眼側の第一面の曲率半径r1と最終面の曲率半径r2の比をRr、
前記凸レンズが単凸レンズの場合の屈折率又は前記凸レンズが2枚接合レンズの場合の等価屈折率をn、
前記対物レンズが所定の差動距離に置かれた場合の被検眼の瞳の結像倍率をPm、とした場合、
θ>80°、Pm<4.5、3.0<Rr かつ
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<2.0
を満たすことを特徴とする。
本発明の目的の一つによれば、低コストかつコンパクトな構成の光学系で、広画角な眼底画像を取得することが可能となる。
[実施形態]
本発明の実施形態について図面を参照しながら、以下に詳細に説明する。本実施形態の装置により撮影できるものは、例えば、人間の網膜等の断層画像である。ただし、以下の実施例で説明する寸法、材料、形状、および構成要素の相対的な位置等は任意であり、本発明が適用される装置の構成又は様々な条件に応じて変更できる。また、図面において、同一であるか又は機能的に類似している要素を示すために図面間で同じ参照符号を用いる。
本発明の実施形態について図面を参照しながら、以下に詳細に説明する。本実施形態の装置により撮影できるものは、例えば、人間の網膜等の断層画像である。ただし、以下の実施例で説明する寸法、材料、形状、および構成要素の相対的な位置等は任意であり、本発明が適用される装置の構成又は様々な条件に応じて変更できる。また、図面において、同一であるか又は機能的に類似している要素を示すために図面間で同じ参照符号を用いる。
(装置構成)
まず、本発明の一実施形態に係る対物レンズを具備した眼底画像取得システム(眼底撮影装置)について、図1を用いて説明する。なお、当該眼底画像取得システムは、断層画像撮影部、眼底画像撮影部、前眼部画像撮影部、制御部、および表示部を備える。本発明の一実施形態に係る対物レンズは各撮影部共通の光路上であって、被検眼と対向して配置される。以下、上述した各部の詳細について順次説明する。
まず、本発明の一実施形態に係る対物レンズを具備した眼底画像取得システム(眼底撮影装置)について、図1を用いて説明する。なお、当該眼底画像取得システムは、断層画像撮影部、眼底画像撮影部、前眼部画像撮影部、制御部、および表示部を備える。本発明の一実施形態に係る対物レンズは各撮影部共通の光路上であって、被検眼と対向して配置される。以下、上述した各部の詳細について順次説明する。
層画像撮影部は、光源1、光分割部3、サンプルアーム1001、参照アーム1002、および分光器1003を含む。光源1は、光(低コヒーレンス光)を発生させるための光源である。光源1には、中心波長850nm、帯域50nmのSLD(Super Luminescent Diode)光源を用いる。なお、光源1には、ASE(Amplified Spontaneous Emission)光源も適用することができる。また、光源1には、チタンサファイアレーザ等の超短パルスレーザ光源も適用することができる。このように、光源1は、低コヒーレンス光を発生させることのできるものなら何でも良い。さらに光源1から発生する光の波長は、特に制限されるものではないが、被検査物に応じて400nmから2μmの範囲で選択される。波長の帯域は広いほど縦分解能がよくなる。一般的に中心波長が850nmの場合、50nmの帯域では6μmの縦分解能が得られ、100nmの帯域では3μmの縦分解能が得られる。
光源1は、光分割部3と光ファイバー等で構成される導光部2により接続される。光分割部3はさらに、光ファイアー等で構成される導光部4,10,14により、サンプルアーム1001、参照アーム1002、および分光器1003に接続される。光源1を発した光は、導光部2により光分割部3に導かれる。光分割手段として作用する光分割部3にはファイバーカプラ等を適用することができる。光源1から出射された光は、光分割部3によって、導光部4を介してサンプルアーム1001に導かれる測定光と、導光部10を介して参照アーム1002に導かれる参照光とに分割される。なお、分割の比率は被検査物に合わせて適切なものを選択できる。
サンプルアーム1001は、導光部4から順に光路上に配置される、コリメータレンズ5、フォーカスレンズ6、光走査部7、リレーレンズ26、波長分岐ミラー35、波長分岐ミラー8、および対物レンズ9を含む。光分割部3で分割されて得た測定光は、導光部4によりサンプルアーム1001に導かれ、ファイバー端4aからコリメータレンズ5に向けて出射される。光走査部7には、光軸方向に隣接して配置(タンデム配置)された互いに直交するX、Y方向に光をそれぞれ走査するガルバノミラー又は共振ミラー等が適用される。
波長分岐ミラー8は、光源1を発した光(波長:λ=825〜875nm)を透過し、後述する前眼部照明の光(λ=940nm)を反射する。波長分岐ミラー35は、光源1を発した光(波長:λ=825〜875nm)を透過し、後述する眼底撮影用の照明光(λ=780nm)および内部固視灯の光(λ=590nm)を反射する。導光部4に導かれた測定光は、サンプルアーム1001を通り被検眼Eの眼底Efに達し、光走査部7の動作により眼底Ef上を走査する。
参照アーム1002は、導光部10から順に光路上に配置される、コリメータレンズ11、および参照ミラー12を含む。光分割部3で分割されて得た参照光は、導光部10により参照アーム1002に導かれ、ファイバー端10aからコリメータレンズ11に向けで出射される。参照ミラー12は、直動ステージ13上に配置され、直動ステージ13を図中矢印で示す光軸方向に移動することにより、参照アーム1002における参照光の光路長を調整できる。
被検眼Eの眼底Efを経た測定光と、参照ミラー12を経た参照光とは、導光部4,10を介して光分割部3にて合波され、干渉光を生成する。干渉光は、導光部14により分光器1003に導かれる。分光器1003は、導光部14から順に光路上に配置される、コリメータレンズ15、分光部16、レンズ17、および撮像部18を含む。分光部16は、回折格子であるグレーティングやプリズム等で構成される。撮像部18は、検出手段としてのCMOSやCCD等の光電変換素子を有する。
次に、眼底画像撮影部について説明する。眼底画像撮影部は、光源28、コリメータレンズ29、波長分岐ミラー30、穴開きミラー31、フォーカスレンズ32、光走査部33、レンズ34、波長分岐ミラー35、波長分岐ミラー8、対物レンズ9を備える。光源28は、光源1とは異なる波長の光を発生させるための光源である。光源28には、中心波長780nmのLED(Light−emitting Diode)光源を用いる。なお、光源28にはLD(Laser Diode)光源も適用することができる。このように、光源28には、光源1とは異なる波長の光を発生させる種々の光源を用いることができる。光源28から出射した照明光の光路上には、上述したコリメータレンズ29、波長分岐ミラー30、穴開きミラー31、フォーカスレンズ32、光走査部33、レンズ34、波長分岐ミラー35、波長分岐ミラー8、および対物レンズ9がこの順で配置される。
光源28から出射された照明光は、波長分岐ミラー30で反射し、穴開きミラー31の光軸上に構成された穴を通過する。光走査部33には、光軸方向に隣接して配置(タンデム配置)された互いに直交するX、Y方向に照明光をそれぞれ走査する一対のガルバノミラー又は共振ミラー等が適用される。波長分岐ミラー35で反射された照明光は、波長分岐ミラー8、対物レンズ9を通り、被検眼Eの眼底Efに達する。
眼底Efで反射された照明光は、眼底入射時と同一の光路を逆に戻り、穴開きミラー31の周辺部分で反射される。穴開きミラー31で反射された照明光の光路上には、レンズ36、およびAPD等の光電変換素子を有する検出部37が配置される。
波長分岐ミラー30の後段には、内部固視灯の光源38が配置される。光源38は、光源1および光源28とは異なる可視波長の光(固視光)を発生させるための光源である。ここでは、光源38に中心波長590nmのLED光源を用いる。なお、光源38にはLD光源も適用することができる。このように、光源38は、光源1および光源28とは異なる可視波長の光を発生させることのできる種々の光源が用いられる。
光源38から出射した固視光の光路上には、コリメータレンズ39、波長分岐ミラー30、穴開きミラー31、フォーカスレンズ32、光走査部33、レンズ34、波長分岐ミラー35、波長分岐ミラー8、対物レンズ9が配置される。光源38からの固視光は、波長分岐ミラー30を透過し、穴開きミラー31の光軸上に構成された穴を通過する。そして、光源28からの照明光と同様の光路で、光走査部33、レンズ34、波長分岐ミラー35、波長分岐ミラー8、対物レンズ9を介して、被検眼Eの眼底Efに達する。
対物レンズ9の周りには、前眼部照明光源21a、21bが配置されている。これらの光源からの光により照明された被検眼Eの前眼部の像は、対物レンズ9を通り、波長分岐ミラー8により反射される。波長分岐ミラー8の反射方向には、前眼部画像撮影部として、レンズ22および撮像部23が配置される、波長分岐ミラー8で反射された前眼部の像は、レンズ22により二次元の撮像部23の撮像面に結像する。
以上に述べた各部を備えた眼底画像取得システムは、制御部19により制御される。より詳細には、制御部19は、上述した光走査部7、直動ステージ13、撮像部18、撮像部23、光走査部33、検出部37、光源38等の制御を行う。また、制御部19には、表示部20、メモリー24、マウス等のポインティングデバイス25が接続されている。制御部19は、撮像部18、撮像部23および検出部37からの出力信号に基づいて、断層画像、眼底画像、前眼部画像を生成し、これらを表示部20に表示させる。また、操作者は、ポインティングデバイス25を用いて眼底画像取得システムに対する各種指示の入力を実行できる。
ここで例示する表示部20には、前眼部画像表示領域20a、断層画像表示領域20b、および眼底画像表示領域20eの画像表示領域が設けられる。また、表示部20には、フォーカス調整表示領域20c、コヒーレンスゲート調整表示領域20d、ワーキングディスタンス調整表示領域20g、および撮影ボタン20hも設けられる。これらは、ポインティングデバイス25を用いて制御部19に対して指示入力を行う際に用いられる。また、眼底画像表示領域20eに表示される眼底画像上には、固視灯の点灯位置(被検眼Eの固視位置に対応)を示すマーク20fが重畳表示される。
(測定方法)
次に、上述した眼底画像取得システムを用いて、被検眼Eの眼底Efの網膜の断層画像を撮像する方法について、その工程を示す図2のフローチャートを用いて説明する。
次に、上述した眼底画像取得システムを用いて、被検眼Eの眼底Efの網膜の断層画像を撮像する方法について、その工程を示す図2のフローチャートを用いて説明する。
被検者が所定位置に着座し、被検眼Eが眼底画像取得システムの前に配置されると、被検眼Eの前眼部は、前眼部照明光源21a、21bの発した光により照明される。照明された前眼部の像は、対物レンズ9を通り、波長分岐ミラー8により反射されて、レンズ22により、撮像部23の撮像面に結像する。撮像部23からの映像信号は、制御部19に入力されてデジタルデータにリアルタイムに変換され、前眼部画像が生成される(ステップS1)。制御部19は、この被検眼Eの前眼部画像のうちの特に虹彩の模様より、被検眼Eの偏心および眼底画像取得システムのフォーカスの状態を判定する。この眼底画像取得システムでは、撮像面の中心とサンプルアーム1001の光学系の光軸が一致するように調整されている。このため、撮像部23で撮像された前眼部画像の瞳孔中心と撮像中心との偏心量が、被検眼Eとサンプルアーム1001の光学系の偏心量に相当する。
サンプルアーム1001の光学系は、被検眼Eに対し、上下左右、さらに光軸方向に位置調整可能となるように不図示のステージ上に配置されている。したがって、制御部19は、被検眼Eの瞳孔中心とサンプルアーム1001の光学系の光軸とが一致するように、該サンプルアーム1001の上下左右の位置を調整する。また、虹彩の模様のコントラストが最も高くなるように、制御部19によるサンプルアーム1001の光軸方向の位置調整が行われる(ステップS2)。これにより虹彩と同一面である被検眼Eの瞳孔とサンプルアーム1001の光学系の対物レンズ9との距離(ワーキングディスタンス)は一定に保たれる。前眼部画像は、表示部20の前眼部画像表示領域20aに表示されている。操作者は、この画像により光軸偏心を確認することができ、ポインティングデバイス25を用いて上述した位置調整を行うこともできる。なお、ワーキングディスタンス調整表示領域20gを、ポインティングデバイス25を操作してカーソルで指示することにより、参ワーキングディスタンスを調整することもできる。
位置調整により瞳孔中心と撮像中心との偏心量が所定の値以下になると、制御部19により光源28が点灯され、アライメント用の眼底画像の撮像が開始される(ステップS3)。光源28から出射された照明光は、コリメータレンズ29により平行光に変換され、波長分岐ミラー30を反射する。波長分岐ミラー30反射後の照明光は、穴開きミラー31の穴を通過し、フォーカスレンズ32を透過し、光走査部33を介して、レンズ34を透過する。さらにレンズ34を透過した照明光は、波長分岐ミラー35を反射し、波長分岐ミラー8を透過し、対物レンズ9を経て被検眼Eの瞳孔より眼底Efに至る。その際、該照明光は、光走査部33のXスキャンミラーおよびYスキャンミラーの動作によって眼底Ef上で二次元走査される。
眼底Efに照射された照明光は、眼底Efの網膜を構成する層で反射・散乱され、戻り光として入射時と同一の光路を戻る。該戻り光は、穴開きミラー31の周辺部分で反射され、レンズ36を透過して、検出部37に導かれる。検出部37は該戻り光から光強度信号を得、該光強度信号は不図示のA/D変換器でデジタル信号に変換された後、制御部19に入力されて眼底画像が生成される。操作者は、この眼底画像を観察し、該眼底画像が最も明るくなるように、ポインティングデバイス25を用いてカーソルでフォーカス調整表示領域20cのボタンを操作してフォーカス調整を行う。得られた眼底画像は、表示部20の眼底画像表示領域20eに表示される。なお、このフォーカス調整は、公知の画像評価技術を用いて眼底画像の画像を評価し、その評価結果に応じて制御部19により行われてもよい。
眼底画像が表示されると、制御部19により光源38が点灯され、内部固視灯の表示が開始される(ステップS4)。光源38からの光は、コリメータレンズ39により平行光に変換され、波長分岐ミラー30を透過する。波長分岐ミラー30透過後の光は、前述の観察光と同様の光路を経て被検眼Eの眼底Efに至る。眼底Ef上の内部固視灯の表示位置は、眼底画像表示領域20e上に×印のマーク20fとして重畳表示されている。操作者は、表示画面上でマーク20fの位置を操作することにより、固視灯の表示位置が所望の位置となるように指定する。制御部19は、操作者の指定した位置に応じて、光源38の点灯タイミングを制御することにより、内部固視灯を操作者の指定した位置に表示させる。
操作者が内部固視灯の位置指定を完了すると、制御部19により光源1が点灯され、アライメント用の断層画像の撮像が開始される(ステップS5)。光源1からの光は、導光部2により光分割部3に導かれ、導光部4と導光部10に導かれる光量の比が、例えば1:9になるように分割される。導光部4側に導かれた光は、ファイバー端4aに達する。ファイバー端4aを点光源として出射された光は、測定光としてコリメータレンズ5により平行光に変換され、フォーカスレンズ6を透過する。フォーカスレンズ6透過後の測定光は、光走査部7、リレーレンズ26、波長分岐ミラー35および波長分岐ミラー8を介して対物レンズ9により被検眼Eの瞳孔より眼底Efに至る。その際、該測定光は、光走査部7の例えばXスキャンミラーの動作によって眼底Ef上で走査される。
測定光は、眼底Efの網膜を構成する複数の層で反射・散乱され、戻り光として入射時と同一の光路を戻る。すなわち、該戻り光は、コリメータレンズ5を経てファイバー端4aより導光部4に入り、再び光分割部3に導かれる。
光分割部3より導光部10側に導かれた光は、参照アーム1002に至り、ファイバー端10aに達する。ファイバー端10aを点光源として出射され光は、参照光としてコリメータレンズ11により平行光に変換され、参照ミラー12に向かう。参照ミラー12は、平行光と垂直に、また、図中矢印で示す光軸方向に移動可能に直動ステージ13上に配置されている。直動ステージ13により参照ミラー12を光軸方向に移動させることにより、異なる眼軸長の被検眼Eに対しても、測定光の光路長と参照光路の光路長とを合わせることができる。なお、操作者は表示部20上のコヒーレンスゲート調整表示領域20dを、ポインティングデバイス25を操作してカーソルで指示することにより、参照ミラー12の位置を調整することができる。
参照ミラー12で反射された参照光は、コリメータレンズ11により導光部10のファイバー端10aに集光され、導光部10により光分割部3に導かれる。光分割部3では、被検眼Eから戻った測定光(戻り光)と参照アーム1002を経た参照光とが合波され、干渉光が生成される。生成された干渉光は、光分割部3により導光部2に向かう光と導光部14に向かう光とに、光量の比が9:1になるように分割される。すなわち、分光器1003に向かう干渉光が分割される分割比は、被検眼Eの眼底Efからの戻り光の生成時の分割比とは逆となる。
戻り光および参照光は、上述したように、光分割部3にて合波されて合波光もしくは干渉光を生成する。導光部14を経て分光器1003に至った干渉光は、ファイバー端14aから出射される。該干渉光は、さらにコリメータレンズ15により平行光に変換され、分光部16に入射する。分光部16には、光の波長に近い寸法の回折格子が等間隔に数多く形成されており、入射した光を回折により分光する。
その際、分光された光の回折角度は波長により異なるため、回折された光は、レンズ17により各々線像として撮像部18のライン状の撮像領域に結像する。すなわち、ファイバー端14aを出射した光は、分光されたスリット像として結像する。したがって撮像部18からは、波長毎の強度に対応した信号が出力される。撮像部18からの信号は、本実施形態における画像形成手段である制御部19に入力される。制御部19では、この信号に対して各種処理を施して断層画像を生成する。生成された断層画像は表示部20の断層画像表示領域20bに表示される(ステップS6)。
操作者は、この断層画像を観察し、該断層画像が最も明るくなるようにポインティングデバイス25を用いてカーソルでフォーカス調整表示領域20cのボタンを操作してフォーカス調整を行う。また、同様に、断層画像表示領域20bの所望の領域内に関心部位の断層画像が全て入るようにコヒーレンスゲート調整表示領域20dのボタンを操作して参照ミラー12の位置調整(コヒーレンスゲート調整)を行う。コヒーレンスゲート調整表示領域20dが指示されると制御部19は、直動ステージ13の位置を指示された方向に移動させる。同時に、メモリー24に記憶している直動ステージ13の制御位置情報を移動量に応じて変更する。
直動ステージ13は、不図示のステッピングモータにより駆動制御されており、直動ステージ13の位置は、ステッピングモータに指示するステップ数と対応している。例えば、60mmのストロークを60000ステップで駆動する場合1ステップあたりの移動量は1μmになる。0−60000までのステップ数が、直動ステージの0から60mmの位置に対応する。また、この直動ステージ13の基準位置からコリメータレンズ11までの距離は設計的に精度よく配置されており、この基準位置と前記ステージ位置の関係も設計的に明らかであるため、このステップ数より参照光路長を計算することができる。
参照ミラー12の光軸方向の位置の変化と共に、参照光の光路長が変化する。これにより断層画像表示領域20b内の断層画像の表示位置が変化する。参照ミラー12の位置は常にメモリー24に記憶されている。以上の撮影準備の後、撮影ボタン20hが押圧されると、断層画像の静止画の撮影が行われる(ステップS7)。断層画像の取得(ステップS8)の操作の詳細は後述する。これにより撮影された断層画像は、メモリー24に記憶される。
(断層画像生成)
次に断層画像の生成処理について説明する。断層画像撮像時には、導光部14には、被検眼Eの眼底Efからの戻り光と、参照ミラー12から反射された参照光との合波光が導かれる。光分割部3から眼底Efまでの光路長と、光分割部3から参照ミラー12までの光路長の差により、光分割部3で合波されるとき、戻り光と参照光とは位相差を有する。断層画像は、この位相差に基づく干渉信号の強度を検出し、この検出結果に基づいて形成される。
次に断層画像の生成処理について説明する。断層画像撮像時には、導光部14には、被検眼Eの眼底Efからの戻り光と、参照ミラー12から反射された参照光との合波光が導かれる。光分割部3から眼底Efまでの光路長と、光分割部3から参照ミラー12までの光路長の差により、光分割部3で合波されるとき、戻り光と参照光とは位相差を有する。断層画像は、この位相差に基づく干渉信号の強度を検出し、この検出結果に基づいて形成される。
より詳細には、この位相差は波長により異なるため、撮像部18の受光領域上に現れる分光強度分布には干渉縞が生じる。また、網膜には複数の層があり、それぞれの層境界からの戻り光はそれぞれ異なる光路長を有するため、干渉縞には、異なる周波数の干渉縞が含まれる。この強度分布に含まれる干渉縞の周波数とその強度より、反射物体の位置とその位置からの反射・散乱に対応した明るさを求めることができる。
眼底上の1ラインをスキャンするBスキャンモードにおいては、制御部19は、光走査部7のX、Yのスキャンミラーの一つ、例えば、Xスキャンミラーだけを駆動しながら、撮像部18からの出力を読み出す。光走査部7からは、スキャンミラーの角度を示すデータが出力されている。このデータは光が被検眼に入射する入射角度θiに変換され、さらにデジタルデータに変換された後、メモリー24に記憶される。スキャンミラーの角度と光線の入射角度θiは、対応しており、光学系の設計値より求めることができる。
次に、分光強度分布から断層画像を生成する信号処理手順の例について説明する。図3は、眼底に対する測定光の入射角度θiをスキャンミラーの角度とした場合の各角度における撮像部18上の光の強度分布を示す。横軸は、撮像部18上のセンサー位置であり、波長に対応する。縦軸は、信号強度である。ここでは、中心波長λ0、半値幅δλの強度分布に対して、干渉縞による波形が重なっている。
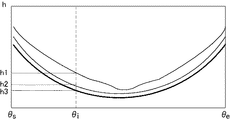
この波形の強度情報を読み出し、A/D変換器によりデジタルデータに変換し、メモリー24に記憶する。このデータを波数変換し、周波数変換すると図4に示すような強度分布が得られる。これはh1、h2、h3の距離(図5の断層画像の上辺に対応するコヒーレンスゲートからの距離)のところの干渉強度がI2、I1、I3であることを示す。したがって、スキャンミラーの角度としたθiを、θsからθeまで変化させながら、干渉強度を測定する。このように取得した干渉強度I(θi,hj)を、θを横軸、hを縦軸にして表示することにより図5に示すように眼底のBスキャン画像(光学的な距離に基づく画像)を得ることができる。
(対物光学系)
次に、広画角に対応した本発明の一実施形態に係る対物光学系について説明する。図6は、本実施形態におけるサンプルアーム1001の光学系の概略の構成を示している。なお、図6では、ファイバー端4aから光源1側の光路、波長分岐ミラー8および波長分岐ミラー35は省略して示している。
次に、広画角に対応した本発明の一実施形態に係る対物光学系について説明する。図6は、本実施形態におけるサンプルアーム1001の光学系の概略の構成を示している。なお、図6では、ファイバー端4aから光源1側の光路、波長分岐ミラー8および波長分岐ミラー35は省略して示している。
図6には、軸上および最軸外の光束が模式的に示されている。図6において、ファイバー端4aから出射した光はコリメータレンズ5、フォーカスレンズ6を透過し、光走査部7によって走査される。光走査部7によって偏向させられた光束(測定光)は、リレーレンズ26および対物レンズ9を透過して被検眼Eの眼底Efに集光される。また、フォーカスレンズ6の光軸上の位置は、眼底Efで反射され逆光路を通ってファイバー端4aに入射する戻り光の光量が最大になり、表示部20に表示される断層画像の明るさが最大になるように設定される。
このとき、フォーカスレンズ6の光軸上の最適な位置は被検眼の視度によって異なる。しかし、本実施形態では、光路長を変化させてフォーカスを合わせる構成とは異なり、フォーカスレンズ6の光軸上の位置を変化させても、サンプルアーム1001の光路長は変化しない。よって、被検眼の視度に応じて参照アーム1002の光路長は変化させる必要がなく、被検眼の視度に応じて参照ミラー12を移動させる必要がない。このため、アライメント時の操作が簡単になる。また、視度の個人差に対応できるよう参照ミラー12の移動範囲を広く確保する必要がないため、装置の小型化に有利になる。
次に対物レンズの焦点距離と、画角との関係について説明する。図6に示した光学系では、光走査部7と被検眼Eの瞳孔とが光学的に共役関係(瞳共役関係)になるように構成されている。ここで瞳結像の倍率は、対物レンズ9とリレーレンズ26との焦点距離の比によって決まる。図6に示したように、リレーレンズ26に対して対物レンズ9の焦点距離が短いと、対物レンズ9と被検眼Eとの距離が短くなる。よって、光がより大きい角度で被検眼Eへ入射し、眼底Ef上の撮影範囲が広くなる。このようにリレーレンズに対して対物レンズの焦点距離を短くすると、走査部の振り角に対して被検眼への入射角をより大きくできるため、小さい振り角で広画角に眼底を走査するのに有利になる。
ここで、眼底撮影範囲の広画角化のためには、対物レンズの焦点距離を短くするとよい。しかし、先にも述べたように、それに伴い対物レンズの曲率半径が短くなると、レンズ端面部の厚みを確保することが難しくなってくる。その対策として、対物レンズの焦点距離を短くしつつ、曲率半径を比較的長くするには、対物レンズに高い屈折率の硝材を用いることが有効である。なお、対物レンズにより生じる色収差を低減するためには可能な限り低い屈折率の硝材を用いるとよいが、その他の収差を低減するためには高い屈折率の硝材を用いることが望ましい。このため、レンズ形状の設計する際の自由度を確保する観点からも、高い屈折率の硝材を用いることが有効である。
[一群からなる対物レンズの場合]
眼底撮影において、広画角な撮影範囲として80°以上の画角が考えられる。以下では、この撮影画角を得るための条件について述べる。なお、ここでは一群からなる対物レンズであって両面凸の単レンズ、又は2枚接合の凸レンズを対象とする。ここで、対物レンズの被検眼側の第一面の曲率半径r1と該対物レンズの最終面(被検眼から最も遠い面)の曲率半径r2との比をRrとし、該対物レンズが単レンズの場合の屈折率又は該対物レンズが接合レンズの場合の等価屈折率をnとする。この場合、対物レンズの焦点距離をfとすると、
1/f =(n−1)×[(1/r1)−{1/(−r2)}]
=(n−1)×{(1/r1)+(1/r2)}
=(n−1)×(1+Rr)/(Rr×r2) ・・・・・・ (式1)
が成り立つ。
眼底撮影において、広画角な撮影範囲として80°以上の画角が考えられる。以下では、この撮影画角を得るための条件について述べる。なお、ここでは一群からなる対物レンズであって両面凸の単レンズ、又は2枚接合の凸レンズを対象とする。ここで、対物レンズの被検眼側の第一面の曲率半径r1と該対物レンズの最終面(被検眼から最も遠い面)の曲率半径r2との比をRrとし、該対物レンズが単レンズの場合の屈折率又は該対物レンズが接合レンズの場合の等価屈折率をnとする。この場合、対物レンズの焦点距離をfとすると、
1/f =(n−1)×[(1/r1)−{1/(−r2)}]
=(n−1)×{(1/r1)+(1/r2)}
=(n−1)×(1+Rr)/(Rr×r2) ・・・・・・ (式1)
が成り立つ。
また、被検眼角膜(瞳)から対物レンズまでの所定の差動距離をWDとし、該対物レンズが瞳から距離WDにおかれた場合の被検眼の瞳の結像倍率をPmとする。また、対物レンズから瞳共役点までの距離は、Pm×WDとなる。この場合、対物レンズの焦点距離fについては、
f=1/{(1/WD)+(1/Pm×WD)}
=WD×Pm/(1+Pm) ・・・・・・・・・・・・・(式2)
とも表すことができる。
この場合、式1と式2とにより、曲率半径r2は、
r2=(n−1)×{(1+Rr)/Rr}×{Pm/(1+Pm)}×WD
・・・・・・・・・・・・(式3)
と表される。
f=1/{(1/WD)+(1/Pm×WD)}
=WD×Pm/(1+Pm) ・・・・・・・・・・・・・(式2)
とも表すことができる。
この場合、式1と式2とにより、曲率半径r2は、
r2=(n−1)×{(1+Rr)/Rr}×{Pm/(1+Pm)}×WD
・・・・・・・・・・・・(式3)
と表される。
ここで、対物レンズのレンズ径をφとし、撮影画角をθとすると
φ/2=tan(θ/2)×WD ・・・・・・・・・・・・(式4)
このφ/2はレンズの曲率半径であるr2より大きくなることはできないため、式(4)より、
tan(θ/2)×WD<r2となり、更に上述した式3より、
(n−1)/tan(θ/2)>{(1+Pm)/Pm}×{Rr/(1+Rr)}
・・・・・・・・・・・・(式5)
が得られる。
φ/2=tan(θ/2)×WD ・・・・・・・・・・・・(式4)
このφ/2はレンズの曲率半径であるr2より大きくなることはできないため、式(4)より、
tan(θ/2)×WD<r2となり、更に上述した式3より、
(n−1)/tan(θ/2)>{(1+Pm)/Pm}×{Rr/(1+Rr)}
・・・・・・・・・・・・(式5)
が得られる。
Rrについては、瞳の球面収差を考慮した場合、これを適切なレベルまで低減するには3より大きい値とする必要がある。なお、実際には、診断に適当な画像を提供する上では、5.0より大きい値とすることが好ましい。また、Rrが22より大きくなると、屈折率をより大きくする必要が生じるため、硝材の選択上実用的ではなくなる。なお、実際に用いられている硝材の屈折率等を考慮すると、Rrは11.0より小さくすることが好ましい。すなわち、Rrについては、3<Rr<22の範囲で選択されるが適当であり、より好ましくは5.0<Rr<11.0の範囲で決定されるとよい。
また、WDについては、小さくなると、例えば被検者或いは被検眼と接触する危険性が生じ、更には涙等によってレンズが汚れる可能性も生じる。このため、20mmよりも大きくする必要がある。また、大きくなりすぎると装置が大型化し、昨今の小型化の要請に逆行することとなる。以上より、WDについては、20mm<WD<45mmの範囲で決定されることが好ましい。
また、Pmについては、大きくなるとフォーカスレンズの移動量が大きくなり、結果として装置の全体的な大型化を招く。このため、フォーカスレンズの移動量として許容される上限が存在する。また、小さくなると、小さな走査器が必要となり、更に絞り等の各部品の構成や配置の精度を高める必要が生じ、達成可能な値に下限値が存在する。さらに、小さくなると、対物レンズで生じる収差が大きくなるため、この点でも下限値を下回らない設計を行う必要がある。このため、可能であれば大きな値とすることが好ましい。以上よりPmについては、2.0<Pm<4.5の範囲で決定されることが好ましい。
ここで、
g(Pm,Rr)=(Pm+1)×Rr/{Pm×(Rr+1)}
・・・・・・・・・・(式6)
という関数を考える。この場合、上述したRr、WDおよびPmの上述した好適な範囲において、Rr/(Rr+1)は単調増加関数であり、(Pm+1)/Pmは単調減少関数となる。よって、
g(Pmmax,Rrmin)< g(Pm,Rr)<g(Pmmin,Rrmax)
・・・・・・・・・・(式7)
となり、上述した各々の臨界値より、
0.917<g(Pm,Rr)<1.435 ・・・・・・・・・・・(式8)
となる。
g(Pm,Rr)=(Pm+1)×Rr/{Pm×(Rr+1)}
・・・・・・・・・・(式6)
という関数を考える。この場合、上述したRr、WDおよびPmの上述した好適な範囲において、Rr/(Rr+1)は単調増加関数であり、(Pm+1)/Pmは単調減少関数となる。よって、
g(Pmmax,Rrmin)< g(Pm,Rr)<g(Pmmin,Rrmax)
・・・・・・・・・・(式7)
となり、上述した各々の臨界値より、
0.917<g(Pm,Rr)<1.435 ・・・・・・・・・・・(式8)
となる。
ここで、屈折率の高い硝材は限られており、選択の自由度やコスト等の観点から、現状2.0以上の屈折率を有する硝材は対物レンズに用いるには適当とはいえない。このため、n<2.0とすることが好ましい。上述した式(5)と式(8)と、nの条件より、
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1
<n<2.0 ・・・・・・・・・・・・・(式9)
となり、g(Pmmax,Rrmin)の条件より、Pm<4.5、3.0<Rrとなる。
以上より式(9)の条件を満たす硝材を用い、更にPm<4.5、3.0<Rrの条件を満たすことにより、光学系を大型化することなく、眼科装置に用いるための、例えば加工容易な対物レンズを得ることができる。
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1
<n<2.0 ・・・・・・・・・・・・・(式9)
となり、g(Pmmax,Rrmin)の条件より、Pm<4.5、3.0<Rrとなる。
以上より式(9)の条件を満たす硝材を用い、更にPm<4.5、3.0<Rrの条件を満たすことにより、光学系を大型化することなく、眼科装置に用いるための、例えば加工容易な対物レンズを得ることができる。
なお、屈折率が高くなると対物レンズによる色分散が大きくなる。上述した条件では、収差に着目して屈折率n<2.0を条件としているが、可視光により画像を得る場合、或いは色分散の影響を低減して画像を得ようとする場合、屈折率は1.85よりも小さくすることが好ましい。
なお、上述した対物レンズは、1種類の硝材からなる単レンズとすることが好ましい。色収差補正等のためには対物レンズ接合レンズにすることも考えられるが、接合レンズにすると、レンズの中心厚が厚くなり、WDの確保に対して不利になる。1種類の硝材からなる単レンズすることで、簡単な構成でWDを比較的長く確保することができる。
[二群からなる対物レンズの場合]
上述したように、加工容易なかつ装置の小型化に好適な対物レンズを得るには、屈折率が2.0より小さい硝材、或いは等価屈折率が2.0より小さくなる接合レンズを用いるとよい。しかし、屈折率が1.85以上の場合には、対物レンズによる色分散の影響が大きくなる。これに対し、対物レンズを二群構成とし、第一レンズ群の被検眼側と反対側の焦点位置と第二レンズ群の第一レンズ群側の焦点位置が一致した構成とすることにより、主光線を平行にして第一レンズ群の屈折率を下げることが可能となる。以下では、対物レンズを二群構成とした場合の第一レンズ群に用いる硝材の屈折率の条件について述べる。
上述したように、加工容易なかつ装置の小型化に好適な対物レンズを得るには、屈折率が2.0より小さい硝材、或いは等価屈折率が2.0より小さくなる接合レンズを用いるとよい。しかし、屈折率が1.85以上の場合には、対物レンズによる色分散の影響が大きくなる。これに対し、対物レンズを二群構成とし、第一レンズ群の被検眼側と反対側の焦点位置と第二レンズ群の第一レンズ群側の焦点位置が一致した構成とすることにより、主光線を平行にして第一レンズ群の屈折率を下げることが可能となる。以下では、対物レンズを二群構成とした場合の第一レンズ群に用いる硝材の屈折率の条件について述べる。
ここで、第一レンズ群の焦点距離をf1とし、第二レンズ群の焦点距離をf2とする。第一レンズ群と第二レンズ群とは焦点位置において上述した配置となっていることから、第一レンズ群において上述した一群レンズからなる対物レンズの場合と同様の関係式を用いることができる。具体的には、Rr、PmおよびWDについては上述した定義に準じ、WD=f1となり、Pm=f2/f1となる。また、上述した関係式は式1から式8が成立する。また、対物レンズをここで述べた二群構成とすることで、屈折率を下げても上述した関係式を成立させることが可能となる、よって、上述した式9は、二群構成の対物レンズにおいて、
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1
<n<1.85 ・・・・・・・・・・・・・・(式10)
となる。
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1
<n<1.85 ・・・・・・・・・・・・・・(式10)
となる。
なお、f1については、上述したWDと同様の条件が求められると考えられる。しかし、実際には、焦点を眼底に位置させることから、f1は25mmより大きければよい。また、光学系の大型化を避ける観点からf1は50mmより小さいことが好ましい。また、f2/f1は2より大きく4より小さいことが好ましい。これら条件を満足することにより、光学系を大型化することなく、眼科装置に用いるための、例えば加工容易な対物レンズを得ることができる。なお、屈折率を1.85より小さくできたことにより、色分散の影響は実際の画像観察時において低減できるが、瞳による球面収差についてはこの限りではない。したがって、一群構成の対物レンズの場合と同様に、Rrの値は5.0よりおおきく11.0より小さくすることが好ましい。
なお、対物レンズは、周辺部に向けて屈折力が小さくなる非球面を含んでもよい。この場合、瞳孔へ収束する光の球面収差を低減することができる。球面収差を低減すると、瞳孔による光束のケラレを抑えることができ、広画角でも周辺部まで良好に眼底画像を取得することができる。また、対物レンズ面の周辺部で曲率半径が大きくなるため、レンズ端面部の厚みの確保にも有利になる。
また、光源からの光は、対物レンズ9にテレセントリックに入射することが好ましい。本実施形態では、リレーレンズ26の焦点位置に光走査部7を配置し、かつ、対物レンズ9の焦点位置に被検眼Eの瞳孔を配置することで、リレーレンズ26と対物レンズ9との間の光束がテレセントリックになるよう構成している。これにより波長分岐ミラー35および波長分岐ミラー8への光線入射角度範囲を小さく抑えることができている。波長分岐ミラーの特性は、光線入射角度に依存する。よって、テレセントリックな光学構成として光線入射角度範囲を小さく抑えることで、波長分岐ミラーの設計難易度および製造難易度を低く抑えることができる。
以上に述べたように、本発明に係る対物レンズは、撮影画角θの眼底撮像装置に具備される対物レンズであって、その一態様は単凸レンズ又は2枚接合の凸レンズからなる。当該対物レンズにおいて、被検眼側の第一面の曲率半径r1と最終面の曲率半径r2の比をRr、凸レンズが単凸レンズの場合の屈折率又は凸レンズが2枚接合レンズの場合の等価屈折率をnとする。また、対物レンズが所定の差動距離に置かれた場合の被検眼の瞳の結像倍率をPmとする。この場合、θ>80°、Pm<4.5、3.0<Rr、かつ
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<2.0
を満たすことにより、低コストかつコンパクトな構成の光学系で、広画角な眼底画像を取得できる。
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<2.0
を満たすことにより、低コストかつコンパクトな構成の光学系で、広画角な眼底画像を取得できる。
また、当該対物レンズにおいては、該対物レンズの色分散の低減のために、更に1.85>nを満たすことがこのましい。さらに、硝材の選択範囲を広げかつ色分散低減のために屈折率を下げるため、眼底撮影装置における光源からの光は、該対物レンズにテレセントリックに入射するように該対物レンズが配置されるとよい。
また、本発明に係る対物レンズは、撮影画角θの眼底撮像装置に具備される対物レンズであって、その他の態様は第一レンズ群と第二レンズ群とから構成される2群構成の対物レンズとなる。この場合、第一レンズ群の被検眼の側と反対側の焦点位置と第二レンズ群の第一レンズ群側の焦点位置が一致するように配置される。当該対物レンズにおいて、被検眼の側である第一レンズ群に用いる単凸又は2枚接合の凸レンズの被検眼側の第一面の曲率半径r1と最終面の曲率半径r2の比をRr、とする。また、第一レンズ群の焦点距離をf1(mm)、第二レンズ群の焦点距離をf2(mm)、とする。この場合、θ>80°、25<f1<50、2<f2/f1<4.5、3.0<Rrかつ
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<1.85を満たすとよい。
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<1.85を満たすとよい。
なお、上述した対物レンズにおいて、球面収差を低減するために、Rrの値を5.0<Rr<11.0とすることが好ましい。また、該対物レンズは、第一面と最終面の少なくともいずれかが光軸から周辺部へ向けて曲率が緩くなる回転対称非球面であることが好ましい。このような回転対称非球面を用いることにより、瞳孔へ収束する光の球面収差を低減することができ、広画角でも周辺部まで良好に眼底画像を取得することができる。また、対物レンズ面の周辺部で曲率半径が大きくなるため、レンズ端面部の厚みの確保にも有利になる。更に、眼底撮像装置は、SS−OCTであるとよい。
以下、本実施形態における対物レンズ9の実施例について説明する。
[実施例1]
本実施形態における実施例1の対物レンズを図7に示す。図7には、軸上および最軸外の光束が模式的に示されている。実施例1は、第一レンズ9aと第二レンズ26aとから構成される2群構成の対物レンズとしている。第二レンズ26aからの光束は第一レンズ9aにテレセントリックに入射するようにしている。第一レンズ9aのr2面は非球面としている。実施例1では撮影画角θ=80°としている。
第一レンズ9aの焦点距離f1=28.3mm、第二レンズ26aの焦点距離f2=117.5mm、瞳結像倍率Pm=f2/f1=4.2、第一レンズ9aの曲率半径の比Rr=r1/r2=3.0である。第一レンズ9aの屈折率n=1.783である。
[実施例1]
本実施形態における実施例1の対物レンズを図7に示す。図7には、軸上および最軸外の光束が模式的に示されている。実施例1は、第一レンズ9aと第二レンズ26aとから構成される2群構成の対物レンズとしている。第二レンズ26aからの光束は第一レンズ9aにテレセントリックに入射するようにしている。第一レンズ9aのr2面は非球面としている。実施例1では撮影画角θ=80°としている。
第一レンズ9aの焦点距離f1=28.3mm、第二レンズ26aの焦点距離f2=117.5mm、瞳結像倍率Pm=f2/f1=4.2、第一レンズ9aの曲率半径の比Rr=r1/r2=3.0である。第一レンズ9aの屈折率n=1.783である。
[実施例2]
本実施形態における実施例2の対物レンズを図8に示す。図8には、軸上および最軸外の光束が模式的に示されている。実施例2は、第一レンズ9bと第二レンズ26bとから構成される2群構成の対物レンズとしている。第二レンズ26bからの光束は第一レンズ9bにテレセントリックに入射するようにしている。第一レンズ9bのr2面は非球面としている。実施例2では撮影画角θ=80°としている。
第一レンズ9bの焦点距離f1=32.3mm、第二レンズ26bの焦点距離f2=142.3mm、瞳結像倍率Pm=f2/f1=4.4、第一レンズ9bの曲率半径の比Rr=r1/r2=3.8である。第一レンズ9bの屈折率n=1.828である。
本実施形態における実施例2の対物レンズを図8に示す。図8には、軸上および最軸外の光束が模式的に示されている。実施例2は、第一レンズ9bと第二レンズ26bとから構成される2群構成の対物レンズとしている。第二レンズ26bからの光束は第一レンズ9bにテレセントリックに入射するようにしている。第一レンズ9bのr2面は非球面としている。実施例2では撮影画角θ=80°としている。
第一レンズ9bの焦点距離f1=32.3mm、第二レンズ26bの焦点距離f2=142.3mm、瞳結像倍率Pm=f2/f1=4.4、第一レンズ9bの曲率半径の比Rr=r1/r2=3.8である。第一レンズ9bの屈折率n=1.828である。
[実施例3]
本実施形態における実施例3の対物レンズを図9に示す。図9には、軸上および最軸外の光束が模式的に示されている。実施例3は、第一レンズ9cと第二レンズ26cとから構成される2群構成の対物レンズとしている。第二レンズ26cからの光束は第一レンズ9cにテレセントリックに入射するようにしている。第一レンズ9cのr2面は非球面としている。実施例3では撮影画角θ=80°としている。
第一レンズ9cの焦点距離f1=26.2mm、第二レンズ26cの焦点距離f2=111.2mm、瞳結像倍率Pm=f2/f1=4.2、第一レンズ9cの曲率半径の比Rr=r1/r2=10.4である。第一レンズ9bの屈折率n=1.965である。
本実施形態における実施例3の対物レンズを図9に示す。図9には、軸上および最軸外の光束が模式的に示されている。実施例3は、第一レンズ9cと第二レンズ26cとから構成される2群構成の対物レンズとしている。第二レンズ26cからの光束は第一レンズ9cにテレセントリックに入射するようにしている。第一レンズ9cのr2面は非球面としている。実施例3では撮影画角θ=80°としている。
第一レンズ9cの焦点距離f1=26.2mm、第二レンズ26cの焦点距離f2=111.2mm、瞳結像倍率Pm=f2/f1=4.2、第一レンズ9cの曲率半径の比Rr=r1/r2=10.4である。第一レンズ9bの屈折率n=1.965である。
[実施例4]
本実施形態における実施例4の対物レンズを図10に示す。図10には、軸上および最軸外の光束が模式的に示されている。実施例4は、第一レンズ9dと第二レンズ26dとから構成される2群構成の対物レンズとしている。第二レンズ26dからの光束は第一レンズ9dにテレセントリックに入射するようにしている。第一レンズ9dのr2面は非球面としている。実施例4では撮影画角θ=80°としている。
第一レンズ9dの焦点距離f1=49.7mm、第二レンズ26dの焦点距離f2=139.5mm、瞳結像倍率Pm=f2/f1=2.8、第一レンズ9dの曲率半径の比Rr=r1/r2=3.3である。第一レンズ9bの屈折率n=1.885である。
本実施形態における実施例4の対物レンズを図10に示す。図10には、軸上および最軸外の光束が模式的に示されている。実施例4は、第一レンズ9dと第二レンズ26dとから構成される2群構成の対物レンズとしている。第二レンズ26dからの光束は第一レンズ9dにテレセントリックに入射するようにしている。第一レンズ9dのr2面は非球面としている。実施例4では撮影画角θ=80°としている。
第一レンズ9dの焦点距離f1=49.7mm、第二レンズ26dの焦点距離f2=139.5mm、瞳結像倍率Pm=f2/f1=2.8、第一レンズ9dの曲率半径の比Rr=r1/r2=3.3である。第一レンズ9bの屈折率n=1.885である。
[その他の実施形態]
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されるものではない。本発明の趣旨に反しない範囲内で変更された発明、および本発明と均等な発明も本発明に含まれる。また、上述した実施形態では、断層画像を取得するシステムとして広帯域光源と分光器を用いたSD−OCT(Spectral−domain OCT)システムを適用しているが、波長可変光源を用いたSS−OCT(Swept−Source OCT)システムを適用してもよい。また、実施形態として述べた眼底撮影装置は例示であり、光画角化が求められる種々の眼底撮影装置に用いる対物レンズに本発明に係る対物レンズは適用することができる。また、本発明に係る対物レンズは、眼底撮影装置本体に具備される対物レンズとして用いることもできるが、光画角撮影のために眼底撮影装置に取り付けられるレンズアダプターの形態とすることもできる。
以上、本発明の好ましい実施形態について説明したが、本発明はこれらの実施形態に限定されるものではない。本発明の趣旨に反しない範囲内で変更された発明、および本発明と均等な発明も本発明に含まれる。また、上述した実施形態では、断層画像を取得するシステムとして広帯域光源と分光器を用いたSD−OCT(Spectral−domain OCT)システムを適用しているが、波長可変光源を用いたSS−OCT(Swept−Source OCT)システムを適用してもよい。また、実施形態として述べた眼底撮影装置は例示であり、光画角化が求められる種々の眼底撮影装置に用いる対物レンズに本発明に係る対物レンズは適用することができる。また、本発明に係る対物レンズは、眼底撮影装置本体に具備される対物レンズとして用いることもできるが、光画角撮影のために眼底撮影装置に取り付けられるレンズアダプターの形態とすることもできる。
1:光源、 2:導光部、 3:光分割部、 4:導光部、 5:コリメータレンズ、6:フォーカスレンズ、 7:光走査部、 8:波長分岐ミラー、 9:対物レンズ、 10:導光部、 11:コリメータレンズ、 12:参照ミラー、 13:ステージ、 14:導光部、 15:コリメータレンズ、 16:分光部、 17:レンズ、 18:撮像部、 19:制御部、 20:表示部、 21:前眼部照明光源、 22:レンズ、 23:撮像部、 24:メモリー、 25:ポインティングデバイス、 26:リレーレンズ、 28:光源、 29:コリメータレンズ、 30:波長分岐ミラー、 31:穴開きミラー、 32:フォーカスレンズ、 33:光走査部、 34:レンズ、 35:波長分岐ミラー、 36:レンズ、 37:検出部、 38:光源、 39:コリメータレンズ
Claims (8)
- 撮影画角θの眼底撮影装置に具備される対物レンズであって、
単凸レンズ又は2枚接合の凸レンズからなり、
被検眼側の第一面の曲率半径r1と最終面の曲率半径r2の比をRr、
前記凸レンズが単凸レンズの場合の屈折率又は前記凸レンズが2枚接合レンズの場合の等価屈折率をn、
前記対物レンズが所定の差動距離に置かれた場合の被検眼の瞳の結像倍率をPm、とした場合、
θ>80°、Pm<4.5、3.0<Rr かつ
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<2.0
を満たすことを特徴とする対物レンズ。 - 1.85>n
を満たすことを特徴とする請求項1に記載の対物レンズ。 - 前記眼底撮影装置における光源からの光は、前記対物レンズにテレセントリックに入射することを特徴とする請求項1又は2に記載の対物レンズ。
- 撮影画角θの眼底撮影装置に具備される対物レンズであって、
第一レンズ群と第二レンズ群とから構成され、
前記第一レンズ群の被検眼の側と反対側の焦点位置と前記第二レンズ群の前記第一レンズ群側の焦点位置が一致するように配置され、
被検眼の側である前記第一レンズ群に用いる単凸レンズ又は2枚接合の凸レンズの被検眼の側の第一面の曲率半径r1と最終面の曲率半径r2の比をRr、
前記第一レンズ群の焦点距離をf1(mm)、前記第二レンズ群の焦点距離をf2(mm)、
前記対物レンズが所定の差動距離に置かれた場合の被検眼の瞳の結像倍率をPm、とした場合、
θ>80°、25<f1<50、2<f2/f1<4.5、3.0<Rr かつ
[(Pm+1)×Rr/{Pm×(Rr+1)}]×tan(θ/2)+1<n<1.85
を満たすことを特徴とする対物レンズ。 - 5.0<Rr<11.0
を満たすことを特徴とする請求項1乃至4のいずれか1項に記載の対物レンズ。 - 前記対物レンズは、前記第一面と前記最終面の少なくともいずれかが光軸から周辺部へ向けて曲率が緩くなる回転対称非球面であることを特徴とする請求項1乃至5のいずれか1項に記載の対物レンズ。
- 前記眼底撮影装置は、SS−OCTであることを特徴とする請求項1乃至6のいずれか1項に記載の対物レンズ。
- 請求項1乃至6のいずれか1項に記載の対物レンズを備えた眼底撮影装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019078641A JP2020174852A (ja) | 2019-04-17 | 2019-04-17 | 対物レンズおよび該対物レンズを備える眼底撮影装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019078641A JP2020174852A (ja) | 2019-04-17 | 2019-04-17 | 対物レンズおよび該対物レンズを備える眼底撮影装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020174852A true JP2020174852A (ja) | 2020-10-29 |
Family
ID=72937588
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019078641A Pending JP2020174852A (ja) | 2019-04-17 | 2019-04-17 | 対物レンズおよび該対物レンズを備える眼底撮影装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2020174852A (ja) |
-
2019
- 2019-04-17 JP JP2019078641A patent/JP2020174852A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8651662B2 (en) | Optical tomographic imaging apparatus and imaging method for optical tomographic image | |
| JP6805539B2 (ja) | 眼科撮像装置 | |
| JP5054072B2 (ja) | 光断層画像撮像装置 | |
| US9566001B2 (en) | Ophthalmologic apparatus | |
| US10028656B2 (en) | Optical coherence tomographic apparatus | |
| US9955866B2 (en) | Optical tomographic imaging apparatus | |
| JP6756498B2 (ja) | 眼科撮影装置 | |
| JP6808383B2 (ja) | 光干渉断層撮影装置、その制御方法および光干渉断層撮影システム | |
| JP7027698B2 (ja) | 眼科撮影装置 | |
| US9289117B2 (en) | Optical tomographic imaging apparatus | |
| JP2017086311A (ja) | 光断層撮像装置および光断層撮像方法 | |
| JP6898716B2 (ja) | 光断層撮像装置 | |
| JP6756516B2 (ja) | 眼科撮影装置 | |
| JP2018102677A (ja) | 撮影装置 | |
| JP2014108212A (ja) | 撮像装置 | |
| JP5828811B2 (ja) | 撮像装置及びその制御方法 | |
| JP2020168266A (ja) | 眼科光干渉断層撮影装置及び眼科光干渉断層撮影装置の制御方法 | |
| JP2015198723A (ja) | 眼科装置 | |
| JP2020121027A (ja) | 模型眼 | |
| JP2024127325A (ja) | 光画像形成装置、光画像形成装置の制御方法、及び、プログラム | |
| JP2020174852A (ja) | 対物レンズおよび該対物レンズを備える眼底撮影装置 | |
| JP2023019698A (ja) | 眼科検査装置及び眼科検査装置の制御方法 | |
| JP6456444B2 (ja) | 眼底撮影装置 | |
| JP2019051369A (ja) | 眼科装置 | |
| JP7348334B2 (ja) | 眼科撮影装置 |