JP4310090B2 - 欠陥データ解析方法及びその装置並びにレビューシステム - Google Patents
欠陥データ解析方法及びその装置並びにレビューシステム Download PDFInfo
- Publication number
- JP4310090B2 JP4310090B2 JP2002282173A JP2002282173A JP4310090B2 JP 4310090 B2 JP4310090 B2 JP 4310090B2 JP 2002282173 A JP2002282173 A JP 2002282173A JP 2002282173 A JP2002282173 A JP 2002282173A JP 4310090 B2 JP4310090 B2 JP 4310090B2
- Authority
- JP
- Japan
- Prior art keywords
- defect
- defects
- distribution
- identifying
- pattern
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30148—Semiconductor; IC; Wafer
Landscapes
- Engineering & Computer Science (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【発明の属する技術分野】
本発明は、半導体ウェーハの製造工程において、検査装置によって検出された欠陥データから、欠陥分布状態を解析する、欠陥データ解析方法及びその装置並びにレビューシステムに関する。
【0002】
【従来の技術】
半導体基板上に回路パターンを形成する半導体デバイスの製造工程(以下、半導体ウェーハの製造工程という)においては、歩留まり向上及び安定化を目的として、各工程後にパターン欠陥検査あるいは異物検査が実施され、検査結果の解析が行われる。その一手法として、欠陥分布状態の解析が知られている。欠陥分布の偏りは、そのほとんどが装置またはプロセスに異常が原因となって発生する。そこで、装置またはプロセス異常に特有の欠陥分布パターンを識別することにより、不良原因を推定することが試みられている。
【0003】
これに関連する従来の技術として、特許文献1には、欠陥分布から欠陥が集中して存在する領域をクラスタとして認識し、クラスタの面積と形状に基づいてレビュー(検出された欠陥を光学顕微鏡あるいは走査電子顕微鏡等で観察すること)するポイントを選択する方法が、特許文献2には、欠陥マップがクラスタ化している様子に従ってウエハをグループ分けし、その様子が既知のパターンと類似しているかどうかを判定することにより不良原因の特定を行う方法が、また、特許文献3には、不良分布画像データを不良原因推定可能な事例データベースと照合解析することにより不良原因の特定を行う方法、特許文献4には、欠陥を分布状態に基づいて不良原因と関連づけられたユーザ定義イベントに分類する方法がそれぞれ記載されている。
【0004】
上記特許文献3記載の方法によると、ウェーハ領域に対応した画像データの画素値を画素に対応する領域の欠陥数に比例した値とした不良分布画像データを作成する。不良分布画像データから、欠陥が集中して塊になった部分すなわちクラスタを検出する。クラスタ部分を対象として、事例データベースとの照合を行う。照合度の高いデータに付帯された情報に基づいて不良原因を特定する。
【0005】
特許文献4記載の方法によると、欠陥が集中した部分をその形状により微細構造クラスタ、線状クラスタ、不定形クラスタに分類し、その他の部分をグローバルとして分類する。それぞれをユーザ定義イベントに細分類し、不良原因と関連づける。
【0006】
【特許文献1】
特開平10−214866号公報
【特許文献2】
特開平6−61314号公報
【特許文献3】
特開平11−45919号公報
【特許文献4】
米国特許5,982,920号公報
【0007】
【発明が解決しようとする課題】
上記方法では、顕著な欠陥分布パターンが現れた場合にはクラスタとして認識することができる。しかし、識別すべき欠陥分布パターンが微弱である場合、すなわち欠陥密度が低かったりパターン内外の差が小さかったりする場合については、特許文献3では考慮されていない。特許文官4に開示された方法によれば、このような場合はグローバルとして分類されるが、その中には様々な形状が混在するため、不良原因と関連づけるためにユーザ定義イベントに細分類する必要がある。
【0008】
本発明の目的は、微弱な欠陥分布パターンに対応可能な、ユーザによる定義不要の、不良原因特定を支援する情報を高速に出力する欠陥データ解析方法およびその装置並びにレビューシステムを提供することにある。
【0009】
【課題を解決するための手段】
上記課題を解決するため、本発明では、基板上に回路パターンを形成する工程で処理された被処理基板を検査して得られた欠陥のデータから欠陥の分布を解析する方法において、被処理基板を検査して得られた欠陥の位置の情報からこの欠陥の被処理基板上の分布を求め、この求めた欠陥の分布の特徴を欠陥の被処理基板上の位置情報を用いて、繰り返し欠陥、密集欠陥、円弧状分布欠陥、放射状分布欠陥、線状分布欠陥、環・塊状分布欠陥、ランダム欠陥の分布特徴カテゴリのうちの何れかに分類するようにした。
【0010】
【発明の実施の形態】
以下に、本発明の実施例について図面を参照しながら説明する。
【0011】
図1は、本発明の欠陥データ解析方法の概念を表す図である。
【0012】
本発明の欠陥データ解析方法の第一の実施例では、半導体ウエハの検査装置101から出力される欠陥データ102には、少なくとも欠陥の位置座標が含まれている。103a、bは、欠陥位置をウェーハの中の一点を原点とした座標系で表したウェーハマップである。検査装置が出力する欠陥の位置座標は、ウェーハの中の一点を原点とした座標系で記述されている場合と、チップ毎に原点を持つ座標系で記述されている場合があり、前者の場合はそのX、Yの座標値をそのまま用いるが、後者の場合はチップ内の位置座標をチップ配列情報とチップサイズの情報を用いて座標系を変換する必要がある。ウェーハマップ上の欠陥分布状態に基づいて、繰り返し欠陥識別、密集欠陥識別、円弧状分布識別、放射状分布識別、線状分布識別、環・環状分布識別、ランダム欠陥抽出の処理により欠陥点の各分布特徴カテゴリへの分類を行う。
【0013】
繰り返し欠陥は、複数のチップにわたってチップ内のほぼ同じ位置に存在する欠陥である。原因としてはレチクル欠陥、虚報などが考えられる。104a、b上の黒点で示す部分は、103a、bにそれぞれ対応する繰り返し欠陥である。
【0014】
図2は、繰返し欠陥識別のフローを示す図である。まず欠陥位置座標から全ての欠陥位置をチップ原点基準の座標で表したチップ重ね合わせマップを作成する(S201)。欠陥の位置座標がウェーハ全体の座標系で記述されている場合は、チップ配列情報とチップサイズの情報を用いてチップ原点の座標系に変換する必要がある。次に、最近点ボロノイ図を作成し、チップ重ね合わせマップ上で隣接する欠陥間の距離を求めておく(S202)。
【0015】
図3に、最近点ボロノイ図の例を示す。最近点ボロノイ図とは、各座標点の勢力範囲を表す図である。座標点Pの勢力範囲は、最も近い座標点がPである点の集合と定義する。これは、Pを取り囲む多角形で表され、Pのボロノイ領域と呼ばれる。Pのボロノイ領域に接するボロノイ領域に対応する点はPの隣接点である。次に、同一チップ内でクラスタ化している欠陥、すなわち隣接欠陥が同じチップでありかつ距離dが予め指定されたしきい値d1以下となる欠陥を処理対象から除く(S203)。残った欠陥の中から、クラスタ化している欠陥、すなわち欠陥間距離dが予め指定されたしきい値d2以下である欠陥をつなげてグルーピングし、予め指定された個数以上の欠陥からなるグループを繰り返し欠陥として検出する(S204)。繰り返し欠陥はグループ毎に、グループ番号を付加する。グループを特徴づけるチップ内座標、構成欠陥数、チップ数を算出、記録しておく。
【0016】
密集欠陥は、ウェーハマップ上で隣接する欠陥との距離が非常に小さい、通常クラスタ欠陥と呼ばれるものである。原因としてはデフォーカス、マイクロスクラッチなどが考えられる。105a、bの黒点で示す部分は、103a、bにそれぞれ対応する密集欠陥である。密集欠陥識別のためには、欠陥間の距離が予め指定されたしきい値以下である欠陥をつなげてグルーピングし、予め指定された個数の欠陥から構成されるグループを密集欠陥として検出する。ウェーハマップに対応する最近点ボロノイ図を作成して隣接する欠陥間の距離を求めておき、隣接欠陥への距離がしきい値以下であるかどうかをチェックする。あるいは、ウェーハマップを格子に分割して各点がどの格子に属するかを予め調べておき、同じ格子か隣の格子にある欠陥の間の距離がしきい値以下であるかどうかをチェックしてもよい。密集欠陥はグループ毎にグループ番号を付加し、グループを特徴づける重心座標、最大x/y座標、最小x/y座標、面積、欠陥密度、構成欠陥数などを算出、記録しておく。
【0017】
円弧状分布欠陥は、CMP(ケミカル・メカニカルポリッシング)工程のスクラッチが原因で円弧状に分布している欠陥である。ウェーハマップ103a、bに対応する円弧状分布欠陥はないので、別のウェーハの例を109に示しておく。
【0018】
放射状分布欠陥は中心から外に向かって広がる筋状に分布している欠陥である。原因は中央からガスを吹き付けるタイプの装置の吹き出し口への異物付着などである。ウェーハマップ103a、bに対応する放射状分布欠陥はないので別のウェーハの例を110に示しておく。
【0019】
線状分布欠陥は欠陥密度の高い部分が直線状に分布している欠陥である。原因としては搬送系傷、流れなどが考えられる。106a、bの四角で囲んだ部分は、103a、bにそれぞれ対応する線状分布欠陥である。線状分布といっても厳密に一直線上に並んでいるわけではなく、ある程度の幅を持つものである。
【0020】
環・塊状分布欠陥は欠陥密度の高い部分が環状あるいは塊状に分布している欠陥である。原因としては周辺剥がれ、装置汚染などが考えられる。107a、bの実線で囲んだ部分は、103a、bにそれぞれ対応する環・塊状分布欠陥である。
【0021】
上記のいずれの種類にも分類されなかったものをランダム欠陥として抽出する。108a、bは、103a、bにそれぞれ対応するランダム欠陥である。
【0022】
次に本発明の円弧状分布欠陥識別方法について図4、5を参照しながら詳細に説明する。
【0023】
図4は、本発明の円弧検出の原理を説明する図である。図4(a)に示すように、円弧上にある点列の任意の2点を選んで垂直二等分線を引くと1点で交わる。その交点は円弧の中心である。このことから、xy空間上の点群から2点を取り出す全ての組合せについて垂直二等分線の通る点を(x,y)に投票し、投票数最大となる(x0,y0)を円弧の中心候補として検出することができる。この時点では半径rの情報が失われているため、中心候補(x0,y0)を原点として全ての点を図4(b)に示すように(r,θ)へ変換する、極座標変換を行う。xy空間で円弧上の点列は半径rが一定であるから、極座標空間上で水平な直線上に分布する。したがって、円弧に対応する水平な線分を検出し、xy空間に逆変換することによって円弧が検出される。
【0024】
図5は、上記原理による本発明の円弧状分布欠陥識別のフローを示す図である。
【0025】
始めに、欠陥座標の任意の2点を選んでそれらの垂直二等分が通る点への投票を行う(S501)。投票空間はウェーハマップの2倍から3倍程度とする。2点の選び方は全ての組合せとするとよいが、時間短縮のためランダムに間引いてもかまわない。適切な前処理によって、円弧を構成しないと判別できる点を除いてもよい。例えば、前述の繰り返し欠陥を除く。また、前述の密集欠陥のうち、円弧状分布として考えられる幅と比較して非常に大きな幅を持つ塊の欠陥を除く。投票の際には、距離が近すぎるものは誤差が大きく、遠すぎるものは、お互いに関係ない点である可能性が高いため、2点間の距離に基づく重み付を行って、距離が近すぎるもの、遠すぎるものの寄与を低減する。
【0026】
次に投票値最大の(x,y)を中心候補として検出する(S502)。周りの値と比較することによってピークの鋭さをチェックし、鋭いピークでなければ処理を終了する(S503)。鋭いピークであれば、投票値最大の(x,y)を原点として、全ての欠陥座標を(r,θ)に変換し、rθ空間上欠陥密度を濃淡で表した極座標変換画像を作成する(S504)。r軸への投影を算出し、投影値最大のrを見つける(S505)。
【0027】
次に、判別分析法、パーセンタイル法など適当な方法でしきい値を求め、極座標変換画像を二値化する(S506)。投票値最大のrの位置で、水平な線分を検出する(S507)。所定のしきい値以下の断絶は連続しているとみなした上で、連続した区間が所定のしきい値以上の部分を線分とする。このような線分が検出されない場合は処理を終了する(S508)。検出された線分をxy空間に逆変換して得られる円弧からあるしきい値以内の距離にある欠陥を円弧状分布欠陥として検出する(S509)。検出された円弧状分布欠陥を処理対象から除いて(S510)S501からの処理を繰り返す。
【0028】
本実施例では、垂直二等分線によるxy空間への投票によって中心を検出する方法について詳しく説明したが、別の方法で中心を検出してもかまわない。一点を通る円の軌跡を(x,y,r)からなる円のパラメータ空間に投票する方法、任意の3点を選んでこれらを通る円を算出し、(x,y,r)のパラメータ空間に投票する方法などが考えられる。
【0029】
次に本発明の放射状分布欠陥識別方法について図6、7を参照しながら詳細に説明する。
【0030】
本発明の放射状分布識別には、ハフ変換を改良した、組合せハフ変換を利用する。まず基本となるハフ変換について説明する。図6は、ハフ変換の原理を説明する図である。xy空間上の直線は原点からの距離ρと垂線の角度θの二つのパラメータで表現される。xy空間上の点P1を通る直線をρθ空間にプロットすると、その軌跡は図に示すように(θ1,ρ1)(θ2,ρ2)を通る曲線となる。xy空間上の他の点についても同様に曲線を描くことができる。図のように点群が一直線上に分布するときそれぞれの点の軌跡はこれらの点を通る直線を表す(θ2,ρ2)で交差する。したがってxy空間上の点群のρθ空間上の軌跡を(θ,ρ)に投票し、投票数が極大となる(θ,ρ)に対応する直線を検出することが行われている。
【0031】
組合せハフ変換は、ハフ変換と同様、ρθ空間への投票であるが、xy空間上の2点を通る直線に対応するρθ空間上の1点にのみ投票する。xy空間上の2点P1,P2の座標をそれぞれ(x1,y1)、(x2,y2)とすると、対応するρとθは次式により算出できる。
【0032】
【数1】

【数2】
ただし、2点のうちx座標の絶対値が大きい方をP1とする。通常のハフ変換ではθは−π/2〜π/2の範囲とするが、ここでは−π〜πとする。つまり直線の傾きだけではなく向きも考慮している。図7にxy空間上の2点の組合せと、ρθ空間上の点の対応を示す。それぞれ同じ記号の点同士が対応している。図に示すように、放射状分布欠陥がある場合はρ=0付近の異なるθで多くのピークが検出されることを利用して識別を行う。
【0035】
図8は、本発明の放射状分布欠陥識別のフローを表す図である。
【0036】
始めに、欠陥座標の任意の2点を選んでそれらを通る直線に対応するρθ空間上の点への投票を行う(S801)。2点の選び方は全ての組合せとするとよいが、時間短縮のためランダムに間引いてもかまわない。また、ウェーハの中心付近の点は必ずρ=0付近に投票されて放射状分布欠陥からの投票に対するノイズになってしまうため、中心からの距離がしきい値以下である欠陥は除いておいてもよい。投票の際には、円弧状分布欠陥識別と同様、2点間の距離に基づく重み付を行って、距離が近すぎるもの、遠すぎるものの寄与を低減する。
【0037】
次に、予め決められた数のピークを値の高いものから順に検出する(S802)。円弧状分布欠陥がある場合はρ=0付近に投票が集中するので、その集中度を調べるために、ρ=0を中心とした所定範囲にあるピーク数の全検出ピーク数に対する割合αを算出する(S803)。ρ=0を中心とした所定範囲になされた投票の全投票に対する割合をαとしてもよい。αが所定しきい値以下であるときは放射状分布欠陥がないと判定して、処理を終了する(S804)。
【0038】
次にρ=0を中心とした所定範囲にあるピークに対して適当なしきい値を決めてピークの近傍、例えば5×5の領域のみ二値化してラベリングを行う(S805)。しきい値はピーク値に対して一定の割合にするか、上記の近傍領域の値の大きい方から予め決められた画素数を“1”にするように決めればよい。ラベルの数が予め決められた数以上であれば放射状分布欠陥があると判定する(S806)。各ラベルの大きさからρとθの範囲を決定し、対応するxy空間上の欠陥を放射状分布欠陥として検出する(S807)。
【0039】
次に本発明の線状分布欠陥識別方法について図9、10を参照しながら詳細に説明する。
【0040】
本発明の線状分布欠陥識別には、ハフ変換を利用する。図9は、線状分布欠陥識別のフローを示す図、図10は処理の例を示す図である。初めに、欠陥座標のハフ変換を行い(S901)、投票数最大の(θ,ρ)を候補直線として検出する(S902)。図10(b)は、図10(a)に示すウェーハマップに対するハフ変換画像である。前述したように線状分布はある程度の幅を持っているため(θ,ρ)の解像度を粗くしておく。しかし通常のハフ変換を実行すると、例えば密集欠陥が2カ所にあるとき2つの密集欠陥を結ぶ直線が検出されるという問題が生じる。密集欠陥が線状に分布していること考えられるため、密集欠陥を除去することも結果に悪影響を及ぼす。
【0041】
この問題を解決するため、投票の際に欠陥間の距離あるいは欠陥間の距離の2乗に比例する重み付を行うことにより、密集欠陥の寄与を低減する。そのために、予めウェーハマップに対応する最近点ボロノイ図を作成し、欠陥間の距離を計算しておく。密集欠陥識別時にボロノイ図の作成をしていればそれを用いてもよい。また、ボロノイ領域の中には1個だけ欠陥が存在するから、ボロノイ領域の面積の逆数は対応する座標における局所的な欠陥密度であると言える。前述の重み付に欠陥密度の逆数、すなわちボロノイ領域面積を使用しても良い。
【0042】
次に、図10(b)に示すように、候補直線を中心とした投票数最大値のα%以上の部分のρ方向の幅Wを求める(S903)。αは予め指定されたしきい値であり、Wは候補直線の幅と考えられる。次に、Wが予め指定されたしきい値以下であるかをチェックする。しきい値より大きい場合、すなわち幅が広すぎるときは、線状分布がないと判断し処理を終了する(S904)。しきい値より小さい場合はウェーハマップを−θ回転させた上で、候補直線の周辺の密度を表す濃淡画像を作成する(S905)。このとき画素サイズはWと等しくする。
【0043】
図10(c)に示す格子は濃淡画像の画素に対応している。ただし図中ではウェーハマップを−θ回転させるかわりに格子をθ回転させて示してある。濃淡画像は欠陥密度が高い格子に大きい画素値を、欠陥密度が低い格子に小さい画素値を対応させるように作成する。例えば格子の中の欠陥数に比例させるなどである。密集欠陥の寄与を低減させるためのハフ変換処理時と同様の重み付を行っても良い。
【0044】
次に判別分析法などの適切な方法を用い、濃淡画像を図10(d)に示すように二値化し、二値画像から線状分布の有無を判断する(S906)。図10(d)の黒で示す部分は線状分布欠陥の候補である。中央の列は候補直線の位置に対応するので、線状分布有無の判断は、中央の列の候補部分の長さ、連続しているかどうか、左右の列の分布の有無を数値化して予め指定したしきい値と比較することにより行う。
【0045】
図10(d)に示す例では、図10(e)の実線の四角の部分が線状分布であると判断できる。線状分布がない場合は処理を終了する(S907)。線状分布がある場合は、図10(f)に示すように図10(e)をθ回転させてウェーハマップの対応する位置に重ね、実線の四角の内側の欠陥を線状分布欠陥として検出する(S908)。
【0046】
検出した線状分布欠陥を次の処理対象から除き(S909)、S901からの処理を繰り返す。一回の処理で検出される線状分布毎にグループ番号を付加し、位置・幅・角度・長さ・欠陥密度などの特徴量を算出、記録しておく。
【0047】
次に、本発明の環・塊状分布欠陥識別方法について詳細に説明する。図11は本発明の本発明の環・塊状分布欠陥識別の概念を表す図である。最初のステップでは、欠陥の位置座標をもとに、欠陥密度の高い部分を1、低い部分を0で表した2値の画像を作成する。以後、この画像を高密度領域画像704と呼ぶことにする。次のステップで、高密度領域画像704の画像サイズに合わせて複数の幾何学的辞書パターン705が自動生成される。次に、高密度領域画像1104と自動生成された複数の幾何学的辞書パターン画像705との一致度がそれぞれ計算され、最後のステップで一致度の最も高いパターン画像706が選択される。
【0048】
本発明の別の形態では,自動生成される幾何学的辞書パターン705の他にユーザによって辞書パターン707を予め登録しておき、両方の中から一致度の最も高いパターン画像706が選択される。パターン画像706とウェーハマップ103を重ね、パターン部に含まれる欠陥を環・塊状分布欠陥として検出する。
【0049】
次に、それぞれのステップの詳細について説明する。
【0050】
まず、欠陥位置座標に基づいて高密度領域画像704を作成する方法について説明する。
【0051】
図12は、高密度領域画像704を作成するためのフローを表す図である。
【0052】
初めに、全欠陥の座標点に対して最近点ボロノイ図を作成し、各点のボロノイ領域の面積を求める(S1201)。前述の線状分布欠陥識別処理でこの計算を行っていればその結果を用いてもよい。次に、ボロノイ領域の面積のヒストグラムを計算する(S1202)。ただし、繰り返し欠陥、密集欠陥、線状分布欠陥のいずれかに分類された欠陥はヒストグラムの計算に含めない。ヒストグラムから最頻度値を求め、最頻度値に予め決められた数(Nとする)をかけて平方根を計算した値を画素サイズとし(S1203)、ウエハ全体が一枚の画像にちょうど収まるように画像サイズを決め、画素当たりの欠陥数を濃淡値で表した画像を作成する(S1204)。このような画像は、全画素を初期値0とし、各欠陥について座標に対応する位置の画素値を1ずつ増加していくことによって作成される。このとき、Nが大きすぎると画像サイズが小さくなり、形状の認識が難しくなってしまうので5程度にするとよい。逆にNが小さすぎると高密度部分と低密度部分の濃度差が小さくなり、判別が困難になってしまう。
【0053】
次に、予め決められたしきい値(Tとする)を用いて二値化し、高密度部分を1、低密度部分を0で表した画像を得る(S1205)。ここでTはNと同程度にすると良い。得られる画像には、欠陥密度が相対的に高い部分のパターンが見られる。最後にそのパターンに対して膨張収縮処理を行い、高密度領域画像1104とする(S1206)。このような手法で画像を作成することにより、疎な分布であっても、適切な画素サイズを設定して、相対的に密度の高い領域を抽出することができる。また、S1204で濃淡画像を作成し、S1205で二値化する別の方法も考えられる。各欠陥に隣接欠陥との最短距離またはその二乗あるいはボロノイ領域面積に比例する重み付を行った上で対応する位置の画素値に加算することによって濃淡画像を作成し、判別分析法を用いて二値化する。
【0054】
次に、幾何学的辞書パターン画像705の自動生成方法について説明する。
【0055】
幾何学的辞書パターン画像705は環状のパターンと塊状のパターンに分けて自動生成される。画像サイズは、高密度領域画像704と同じとし、画像上に描ける最大の円を基準として以下の方法でパターンを生成する。
【0056】
環状パターンは、基準となる円を同心円によって半径方向に等分に分割し、扇形によって中心角方向に等分に分割されてできた小領域の組み合わせによって生成される。図13に示す、半径方向に5分割、中心角方向に8分割したパターンを例にとって小領域の組み合わせ方法について説明する。まず、半径方向に分割した円環(一番内側は円)に外側からa,b,c,d,eと記号を付け、中心角方向に8分割した扇形に順に1〜8の番号を付ける。完全な円環または円の大きさの組み合わせは、a,b,c,d,e,ab,bc,cd,de,abc,bcd,cde,abcd,bcde,abcde の15通りである。円環の部分のバリエーションは8分の1、8分の2、8分の3、8分の4、8分の5、8分の6、8分の7の大きさについてそれぞれ8通りの組合せがある。例えば8分の2の大きさの場合は12,23,34,45,56,67,78,81の組合せである。これらの組み合わせに完全な円環1通りを加えて計57通りの組み合わせが考えられる。それぞれに対して前述の大きさの組み合わせ15通りが考えられるから、合計855通りのパターンが生成される。
【0057】
半径方向および中心角方向の分割はこの通りでなくても良い。また、等分の分割である必要もないが、処理を煩雑にしないためには等分の方が望ましい。
【0058】
塊状パターンは、基準となる円を垂直方向の直径を長軸とする楕円により水平方向に等分に分割し、かつ水平方向の直径を長軸とする楕円により垂直方向に等分に分割してできる小領域の組み合わせによって生成される。
【0059】
図14(a)に水平方向、垂直方向にそれぞれ8分割した例を示す。水平方向の大きさと位置の組み合わせは、大きさは1から8までの8通りで、位置は大きさNのとき(9−N)通りであるから計36通りである。垂直方向も同様で、水平方向と垂直方向の組み合わせは自由にできるので1296通りのパターンが生成される。図14(b)〜(d)は、この方法によって生成されるパターンの例である。それぞれ黒く塗りつぶした部分がパターンに対応している。図14(e)のように離れた領域の組み合わせや、図14(f)のように凹凸のあるパターンはこの方法によっては生成されない。塊状パターンとしては、上記方法によって作成したパターンを基準となる円の中心を基準に45度回転させたものも考えられる。図14(g)に、この場合の分割される小領域の様子を示す。どちらか一方を用いてもよいし、両方用いてもよい。また、分割数は8でなくてもよい。
【0060】
以上の方法で幾何学的辞書パターン画像705を自動生成することにより、パターン数を実用的なレベルに押さえることができ、したがって高速な処理を実現できる。
【0061】
次に、高密度領域画像704とそれぞれの辞書パターン画像705との一致度の算出方法について図15を用いて説明する。高密度領域画像704の各画素値を、辞書パターン画像705の同じアドレスの画素値と比較し、一致していれば+1不一致ならば−1として全画素での比較の結果を合計し、この値を一致度とする。図15では、高密度領域画像704と辞書パターン画像の一部705a、705bを画素値1を黒で、画素値0を白で表している。708a、708bはそれぞれ、高密度領域画像704と辞書パターン画像705a、705bとの不一致箇所を黒で示した画像である。すなわち、これらの画像の白部分の画素値は1、黒部分の画素値は−1であり、全画素値の合計が一致度となる。708aと708bを比較すると708aの方が黒の面積が小さいので、705aのパターンの方が705bより高密度領域画像704との一致度が高い。
【0062】
以上説明した方法では、必ずパターン706が検出されるが、実際には非常に密度の低い場合や密度差の小さい場合はパターンなしとした方が良い。したがって検出したパターン706を検証しパターンの有無の判定を行う。以下にパターン有無の判定方法およびパターン検出の感度調整方法について説明する。パターンの有無の判定を行うためには、高密度領域画像704作成時に重み付を行う方法で濃淡画像作成し、その濃淡画像を用いる。検出したパターン画像706と濃淡画像を重ね、濃淡画像の画素値からパターン内外の判別分析値の比Cを次式を用いて算出する。
【0063】
【数3】
Cを予め指定したしきい値と比較し、しきい値以下の場合はパターンなしと判定する。また、S1202で得たヒストグラムにおいて最頻度値が予め指定したしきい値より低いときは以下の処理を行わないでパターンなしと判定する。前者のしきい値は小さく設定すればより密度差の小さいパターンを検出するようになる。また、後者のしきい値は小さく設定すればより欠陥密度の小さいパターンを検出するようになる。したがってこれらのしきい値をユーザによって指定されるようにすれば、ユーザによる感度調整が可能となる。
【0065】
ところで半導体ウェーハの検査は、スループットの制約から全面を検査するとは限らず、チップ列毎に検査・非検査を指定する部分検査が行われる場合も多い。この場合上記の環・塊状分布識別方法ではパターン検出が困難である。この問題を解決するための、環・塊状分布識別の別の方法について図16を参照しながら以下に説明する。
【0066】
図16は、部分検査ウェーハの欠陥データに適用可能な環・塊状分布識別の概念を表す図である。部分検査を実行した場合、ウェーハマップ103は例えば図に示すようになる。前述と同様の方法で高密度領域画像704を作成し、幾何学的辞書パターン705を自動生成する。一方、検査条件情報およびチップマトリックスデータをもとに、検査領域画像709を作成する。検査領域画像709と各幾何学的辞書パターン705を重ね、非検査領域をマスクして一致度の算出を行う。つまり、高密度領域画像704の、辞書パターン画像705、検査領域画像709を同時に走査し、非検査領域の場合には0、検査領域の場合には高密度領域画像704と辞書パターン画像705の画素値が一致していれば+1、不一致ならば−1を全画素について合計し、この値を一致度とする。このようにして各辞書パターン画像705との一致度を算出し、最も一致度の高いパターン画像706を選択する。この方法によれば、部分検査の場合でも辞書パターン705との一致度を精度良く算出することができるため、環・塊状分布欠陥識別が可能となる。
【0067】
次に、ユーザパターン登録方法について以下に説明する。
【0068】
図17は、ユーザパターン登録方法を説明する図である。初めにユーザは登録したいパターンを持つウェーハマップ901を指定して画面に表示させる。この指定は省略してもよくその場合は何も表示されない。次に、幾何学的辞書パターンの自動生成のもとになる、分割パターン902a〜902cの中から一種類を選択する。902aは、図13に示す環状パターンと同一のものであり、902b、902bは図14(a)、(g)にそれぞれ示す塊状パターンと同一のものである。選択された分割パターン902はウェーハマップ901に重ねて表示される。また、選択された分割パターン902の各小領域はマウスクリックなどのユーザの指定により選択・非選択状態がスイッチされ、選択された領域が色違いで表示される。
【0069】
ユーザはウェーハマップ上で欠陥密度が高い位置、あるいは自由に小領域を選択し、選択終了後登録を指示する。指定された小領域の組み合わせは、自動生成されるパターンと比較され、自動生成されるパターンに含まれていない場合は、パターン画像903が、ユーザ登録パターン707として保存される。この方法によれば、ユーザ登録パターンとしてはパターン画像ではなく選択した小領域の組み合わせをコード化して記録しておけば充分である。
【0070】
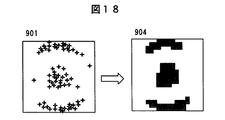
図18は、上記と異なるユーザパターン登録方法を説明する図である。ユーザは登録したいパターンを持つウェーハマップ901を指定して画面に表示させる。前述した高密度領域画像作成方法によって高密度領域904が作成され、表示される。高密度領域904は自動生成される辞書パターンおよび既登録のユーザ登録パターンとの間で一致度が算出され、一致度の最大値が予め決められたしきい値以下であれば、ユーザ登録パターン707として登録される。この場合、ユーザ登録パターン707は画像データとして記録される。
【0071】
ユーザパターン登録方法としては、上記2種類の方法の両方を備えていてもよいし、どちらか一方でもよい。また、上記とは異なる方法でもかまわない。
【0072】
本発明の欠陥データ解析方法の第二の実施例では、環・塊状分布欠陥識別において、自動生成される幾何学的辞書パターン705とユーザ登録パターン707のそれぞれに関連する情報を付加しておき、第一の実施例と同様の方法でパターン画像706を選択する。
【0073】
付加する情報は、パターンの位置、サイズ、形状、重要度、特記事項である。幾何学的辞書パターン705のパターン位置、大きさ、形状については一定のルールにより大雑把な分類を行い、デフォルトの情報を付加しておく。塊状のパターンについては、パターンの位置は右上、上、左上、右、中央、左、右下、下、左下程度に分類、サイズは大、中、小程度に分類、形状は塊状とする。例えば図14(b)は、左上にサイズ小の塊状パターン、図14(c)は、右にサイズ中の塊状パターン、図14(d)は、中央にサイズ大の塊状パターンとなる。環状のパターンについては、右上に半径大の4分の1の環状パターンとする。ただし、塊状のパターンから派生したパターンであっても、一番外側一列のみのパターンであれば環状パターン、環状パターンから派生したパターンであっても、一番内側の円を含んでいれば塊状パターンとする。
【0074】
さらに、幾何学的辞書パターン705およびユーザ登録パターンを手動でグルーピングし、まとめて情報を付加する手段を備えておき、ユーザが同一だと判断するパターンには同じ情報をつけられるようにする。これにより位置やサイズの情報の解像度を調整することができる。重要度の情報はユーザが入力する。特記事項には、直接不良原因と関連する情報などを入力する。
【0075】
次に、本発明の欠陥データ解析方法を備えた検査装置の第一の実施例について説明する。以下の説明では繰り返し欠陥、密集欠陥、線状分布欠陥、環・塊状分布欠陥、ランダム欠陥を分布特徴カテゴリと呼ぶことにする。半導体ウェーハの検査装置としては、異物検査装置、光学式パターン欠陥検査装置、SEM式パターン欠陥検査装置などが知られているが、本発明の検査装置は、それら検査装置いずれかと同様の公知の方法で半導体ウェーハの検査を行い、得られる欠陥データ情報に基づき、前述の方法で分布特徴カテゴリへの分類を行い、カテゴリ情報を欠陥データ情報とともに出力するものである。
【0076】
図19は、本発明の検査装置の第一の実施例の構成を説明する図である。
【0077】
パターン情報付加手段301は、自動生成される複数の幾何学的辞書パターンとユーザ登録辞書パターンに対して、パターンの位置、サイズ、形状、重要度、特記事項といったパターンに関連する情報を付加する。幾何学的辞書パターンに対してデフォルトの情報を付加する部分と、幾何学的辞書パターンおよびユーザ登録辞書パターンに手動で情報を付加する部分からなる。パターン情報の付加はオフラインで行われる。最低一回は実施して結果をハードディスクなどの記憶手段302にパターン情報ファイル311として保存しておくようにする。
【0078】
欠陥データ解析は、インラインとオフラインの両方のモードで実行することができる。
【0079】
検査手段303は公知の方法でウェーハ検査を行い、少なくとも欠陥位置座標を含む欠陥データ102を記憶手段302に保存する。
【0080】
インラインモードの場合、検査手段303は1枚毎のウェーハ検査終了時に検査終了の通知を欠陥データ解析手段304に送る。欠陥データ解析手段304は、記憶手段302よりウェーハ1枚分の欠陥データ102を読み込む。あるいは記憶手段302を介さずに欠陥データ102の受け渡しがなされるように構成してもよい。
【0081】
オフラインモードの場合、欠陥データ解析手段304は、オペレータにより指示されたウェーハの欠陥データ102を読み込む。
【0082】
欠陥データ解析手段304は、欠陥の位置座標をもとに分布特徴カテゴリへの分類を行い、各欠陥の欠陥データに、分布特徴カテゴリ番号とカテゴリ内のグループ番号を付加する。環・塊状分布欠陥が検出された場合は、記憶手段302からパターン情報ファイル311を読み出し、環・塊状分布欠陥の欠陥データにパターン画像番号またはパターン情報を付加し、検査と解析両方の結果を含む欠陥データ102として記憶手段302に保存する。インラインモードの場合は、解析の終了を検査手段303に通知する。
【0083】
分布特徴カテゴリへの分類結果は、表示手段305により表示される。ウェーハマップにカテゴリ毎に異なる色で表示しても良いし、図1に示すようにカテゴリ別にウェーハマップを作成して表示しても良い。同時にチップ重ね合わせマップを表示しても良い。また、環・塊状分布識別において選択されたパターン画像706は、検査対象ウェーハに関連する情報とパターンに付加されていたパターン情報とともに表示手段305により表示される。同時に検査対象ウェーハと関連づけて画像ファイルとして保存される。また、線状分布欠陥が検出された場合はその位置を示す四角形がウェーハマップに重ねて表示され、同時に位置・幅・角度・長さ・欠陥密度などの情報が表示される。これらの情報は検査対象ウェーハと関連づけて保存される。
【0084】
ユーザパターン登録手段306は、オペレータの指示によりユーザ登録パターンを作成し、前述した方法の違いによりパターンコードあるいはパターン画像を記憶手段302に保存する。ユーザパターン登録手段306がない構成にすることも可能である。
【0085】
次に、本発明の欠陥データ解析方法を備えた検査装置の第二の実施例について説明する。第二の実施例は、公知の方法で半導体ウェーハの検査を行い、得られる欠陥データ情報に基づき、前述の方法で欠陥の分布特徴カテゴリへの分類を行い、カテゴリ毎に予め指定されたルールに基づきサンプリングを行い、欠陥データとともに分類結果及びサンプリング結果を出力するものである。
【0086】
図20は、本発明の検査装置の第二の実施例の構成を説明する図である。
【0087】
パターン情報付加手段301は前述の情報の他に、サンプリング条件番号を付加する。同一のサンプリング条件を用いる辞書パターンを手動でグルーピングし、同じサンプリング番号をつける。その番号に対応するサンプリング条件がない場合は、サンプリング条件作成手段307によって、サンプリング条件を作成するようにする。
【0088】
サンプリング条件作成手段307は、レビューを行う欠陥を決定するためのサンプリング条件を作成する。環・塊状分布欠陥のパターンに関連づけられたサンプリング条件および他の分布特徴カテゴリ毎のサンプリング条件が手動で作成され、サンプリング条件ファイル312として記憶手段302に保存される。サンプリング条件は、例えばサンプリング数またはサンプリング比率とサンプリング方法である。サンプリング数とサンプリング比率はどちらで指定するかのを選択してから数値を入力する。サンプリング数はパターン内の欠陥数に対するサンプリング比率で決められる。サンプリング方法としては、ランダム、欠陥番号順など考えられる方法をリストアップしておき、ユーザによって選択されるようにしておく。欠陥番号順が指定されたとき、サンプリング比率に合う間隔でサンプリングを行う。
【0089】
検査手段303、欠陥データ解析手段304の動作は、第一の実施例と同様である。
【0090】
サンプリング手段308は、欠陥解析終了後、記憶手段302よりサンプリング条件ファイル312とウェーハ1枚分の分布特徴情報付加済みの欠陥データ102を読み込む。欠陥データ102の受け渡しは、記憶手段302を介さずになされるように構成してもよい。次に欠陥データが分布特徴カテゴリのいずれであるのかによって、環・塊状分布欠陥であれば付加されているパターン情報に関連するサンプリング条件を用いてサンプリングを行い、その他であれば分布特徴カテゴリ毎のサンプリング条件に基づいてサンプリングを行う。サンプリングの結果、レビューする・しないのフラグが欠陥データに付加され、検査、解析、サンプリングの結果を含む欠陥データ102として記憶手段302に保存される。
【0091】
欠陥データ解析手段304によって選択されたパターン画像706は、検査対象ウェーハに関連する情報とパターンに付加されていたパターン情報とともに表示手段305により表示される。ウェーハマップ上にサンプリングされた欠陥が他の欠陥とは異なる色または記号で示されたものが表示される。図21に、結果表示画面の一例を示す。
【0092】
ユーザパターン登録手段306の動作は、第一の実施例と同様であるが、これがない構成とすることも可能である。
【0093】
次に、本発明の欠陥データ解析方法を備えたレビューシステムについて説明する。
【0094】
図22は、本発明のレビューシステムを説明する図である。
【0095】
ネットワーク上には異物検査装置401、光学式パターン欠陥検査装置402、SEM式パターン欠陥検査装置403、欠陥データ解析装置404、レビュー装置405が接続されている。各検査装置401〜403とレビュー装置405はクリーンルーム内に設置される。欠陥データ解析装置404はどこにあってもよい。
【0096】
各検査装置401〜403によって検査された結果は欠陥データ102として同一形式でファイル出力され、欠陥データ解析装置404に転送される。欠陥データ解析装置404は、図20に示す検査装置から検査手段303を除いた構成である。欠陥解析対象ウェーハの欠陥データ102を読み込み、分布特徴カテゴリへの分類と、分類結果に基づくサンプリングを実行する。欠陥データ102に分布特徴情報とサンプリングフラグを付加してファイル出力し、欠陥データ102’としてレビュー装置405に転送する。
【0097】
レビュー装置405は、指定されたレビュー対象ウェーハに対応する、サンプリングフラグを付加された欠陥データ102’を読み込み、その情報に従い欠陥をレビューし、手動あるいは自動で欠陥種の分類を行う。分類結果としてカテゴリ番号を欠陥データ102’に付加して、ファイル出力し、欠陥データ解析装置404に転送する。同時に関連するレビュー画像も転送する。
【0098】
欠陥データ解析装置404は、解析対象ウェーハの欠陥分布パターン、欠陥レビュー結果をもとにレポートを作成して保存する。レポートに記述する情報は、対象ウェーハの情報、分布特徴カテゴリへの分類結果、レビュー画像とする。分布特徴と欠陥のレビュー画像が同時に示されることによって、原因の推定が容易になる。ユーザの要求によって、サンプリング位置情報、レビュー結果とサンプリング比率から算出される、推定欠陥種別比率、その他、公知の解析手段による解析結果などより詳細な情報を記述するようにしてもよい。レポートのファイル形式は何でもよいが、HTML形式のフォーマットとし、インターネットあるいはイントラネットで接続されるデータサーバ406にアップロードし、接続可能な任意の端末407から閲覧できるようにしてもよい。
【0099】
以上、3種類の検査装置と、1台のレビュー装置が接続されている例を示したが、最低1台の検査装置と1台のレビュー装置が接続されているだけでもよい。また、各種検査装置およびレビュー装置が複数台あってもかまわない。各検査装置が本発明の検査装置の第二の実施例と同様の構成を持っているならば、検査装置の中で欠陥データ解析装置の機能が実現できるので、独立した欠陥データ解析装置は不要である。
【0100】
上記の欠陥データ解析方法、およびそれを有する検査装置またはレビューシステムは、一枚のウェーハの欠陥データを処理することを前提としているが、サンプリングではなく欠陥分布識別を目的とする限りにおいては、複数のウェーハを解析対象とすることも可能である。その場合、まず、複数のウェーハの欠陥位置座標を重ね合わせ、重ね合わせられた欠陥位置座標をもとに高密度領域画像を作成すればよい。
【0101】
【発明の効果】
本発明によれば、検査装置によって検出された欠陥位置座標に基づいて繰り返し欠陥、密集欠陥、円弧状分布欠陥、放射状分布欠陥、線状分布欠陥、環・塊状分布欠陥、ランダム欠陥といったそれぞれ発生原因の異なる分布特徴カテゴリに分類するため、不良原因の絞り込みが容易にできる。
【0102】
また、欠陥の高密度部分を表す高密度領域画像を最適画像サイズで作成するため、微弱な欠陥分布パターンであっても、パターン領域を抽出することができる。
【0103】
また、本発明によれば、高密度領域画像を複数の幾何学的パターンのうちいずれかに分類するため、計算時間、記憶容量ともに実用的なレベルでの欠陥分布状態の解析が実現可能となる。
【0104】
さらに、複数の幾何学的パターンのそれぞれに予め意味づけすることが可能なので、装置・プロセス起因の不良原因の特定を容易にすることができる。
【図面の簡単な説明】
【図1】本発明の欠陥データ解析方法の概念を表す図
【図2】繰り返し欠陥識別のフロー
【図3】最近点ボロノイ図の例
【図4】円弧検出の原理を説明する図
【図5】円弧状分布欠陥識別のフロー
【図6】ハフ変換の原理を説明する図
【図7】組合せハフ変換の処理の例
【図8】放射状分布欠陥識別のフロー
【図9】線状分布欠陥識別のフロー
【図10】線状分欠陥識別処理方法を説明する図
【図11】環・塊状分布欠陥識別の概念を表す図
【図12】高密度領域画像作成のフロー
【図13】環状の辞書パターンの自動生成方法を説明する図
【図14】塊状の辞書パターンの自動生成方法を説明する図
【図15】高密度領域画像と辞書パターン画像との一致度算出方法を説明する図
【図16】部分検査ウェーハに適用可能な環・塊状分布識別の概念を表す図
【図17】第一のユーザパターン登録方法を説明する図
【図18】第二のユーザパターン登録方法を説明する図
【図19】本発明の検査装置の第一の構成例
【図20】本発明の検査装置の第二の構成例
【図21】欠陥データ解析結果表示画面例
【図22】本発明のレビューシステムの構成例
【符号の説明】
101…検査装置 102…欠陥データ 103…ウェーハマップ
301…パターン情報付加手段 302…記憶手段 303…検査手段 304…欠陥データ解析手段、305…表示手段、306…ユーザパターン登録手段 307…サンプリング条件作成手段 308…サンプリング手段
401…異物検査装置 402…光学式パターン欠陥検査装置 403…SEM式パターン欠陥検査装置 404…欠陥データ解析装置 405…レビュー装置 406…データサーバ 407…端末装置
Claims (7)
- 基板上に回路パターンを形成する工程の途中において前記回路パターンの一部が形成された被処理基板を検査して得られた欠陥の少なくとも位置座標を含む欠陥データを用いて全欠陥の位置をチップ原点基準の座標系で表したチップ重ね合わせマップを作成するステップと、前記チップ重ね合わせマップに対応する最近点ボロノイ図を用いて隣接欠陥間の距離を算出するステップと、前記隣接欠陥間の距離に基づいて繰り返し欠陥を識別するステップと、全欠陥の位置をウェーハ原点基準の座標系で表したウェーハマップを作成するステップと、前記ウェーハマップに対応する最近点ボロノイ図を用いて隣接欠陥間の距離とボロノイ領域面積を算出するステップと、前記隣接欠陥間の距離に基づいて密集欠陥を識別するステップと、前記ウェハマップ上で円弧状に分布する円弧状分布欠陥を識別するステップと、前記ウェハマップ上で中心から外側に向かって広がる筋状の分布を有する放射状分布欠陥を識別するステップと、前記隣接欠陥間の距離およびボロノイ領域面積に基づいて線状分布欠陥を識別するステップと、前記隣接欠陥間の距離およびボロノイ領域面積に基づいて環・塊状分布欠陥を識別するステップと、前記繰り返し欠陥および密集欠陥および線状分布欠陥および環あるいは塊状分布欠陥のいずれにも該当しない欠陥をランダム欠陥として抽出するステップとを含み、前記円弧状分布欠陥を識別するステップにおいて前記円弧状分布欠陥を識別することを、欠陥座標上の任意の2つの欠陥を選んでそれらの垂直二等分線が通る点への投票を行い、周りの値と比較して鋭い同ピークをもつ投票値最大の点を極座標系の原点として全ての欠陥座標を極座標に変換し、該変換した極座標上で円弧状欠陥候補が分布する領域を抽出し、該抽出した領域をxy空間に逆変換して円弧状分布欠陥を抽出することにより行うことを特徴とする欠陥データ解析方法。
- 前記円弧状分布欠陥を識別するステップにおいて円弧状分布欠陥に分類された欠陥を、CMP (ケミカル・メカニカル ポリッシング) 加工により発生したスクラッチであると判定することを特徴とする請求項1記載の欠陥データ解析方法。
- 前記欠陥座標上の任意の2つの欠陥を選んでそれらの垂直二等分線が通る点への投票を行うことを、前記任意に選んだ2つの欠陥の垂直二等分線が通過する点を前記2つの欠陥の距離に関連づけた重み付を行った上でxy空間に投票することを特徴とする請求項1記載の欠陥データ解析方法。
- 前記変換した極座標上で円弧状欠陥候補が分布する領域を抽出することを、前記変換した極座標上で検出される水平な線分に基づいて円弧状分布欠陥を識別することを特徴とする請求項1記載の欠陥データ解析方法。
- 被処理基板上に回路パターンを形成する工程の途中において前記回路パターンの一部が形成された被処理基板を検査して得られた欠陥の少なくとも位置座標を含む欠陥データを用いて全欠陥の位置をチップ原点基準の座標系で表したチップ重ね合わせマップを作成するステップと、前記チップ重ね合わせマップに対応する最近点ボロノイ図を用いて隣接欠陥間の距離を算出するステップと、前記隣接欠陥間の距離に基づいて繰り返し欠陥を識別するステップと、全欠陥の位置をウェーハ原点基準の座標系で表したウェーハマップを作成するステップと、前記ウェーハマップに対応する最近点ボロノイ図を用いて隣接欠陥間の距離とボロノイ領域面積を算出するステップと、前記隣接欠陥間の距離に基づいて密集欠陥を識別するステップと、前記ウェハマップ上で円弧状に分布する円弧状分布欠陥を識別するステップと、前記ウェハマップ上で中心から外側に向かって広がる筋状の分布を有する放射状分布欠陥を識別するステップと、前記隣接欠陥間の距離およびボロノイ領域面積に基づいて線状分布欠陥を識別するステップと、前記隣接欠陥間の距離およびボロノイ領域面積に基づいて環あるいは塊状分布欠陥を識別するステップと、前記繰り返し欠陥および密集欠陥および線状分布欠陥および環あるいは塊状分布欠陥のいずれにも該当しない欠陥をランダム欠陥として抽出するステップとを含み、前記放射状分布欠陥を識別するステップにおいて前記放射状分布欠陥を識別することを、欠陥座標上の任意の2点を選んでそれらを通る直線に対応する極座標(ρ、θ)空間上の点への投票を行って極座標空間上の分布データを作成し、該極座標(ρ、θ)空間上の分布データにおいてρ=0を中心とした所定の範囲のデータから前記放射状分布欠陥を抽出することにより行うことを特徴とする欠陥データ解析方法。
- 前記欠陥座標上の任意の2つの欠陥を選んでそれらを通る直線に対応する極座標(ρ、θ)空間上の点への投票を行うことを、前記2欠陥を結ぶ線分に対応するρ,θを前記2欠陥の距離に関連づけられた重み付を行った上で投票することを特徴とする請求項5記載の欠陥データ解析方法。
- 前記極座標(ρ、θ)空間上の分布データにおいてρ=0を中心とした所定の範囲のデータから前記放射状分布欠陥を抽出することを、前記投票した極座標(ρ、θ)空間上の複数のピークを検出し、ρ=0を中心とした所定の範囲への投票の集中度が所定のしきい値を超える場合に、前記範囲に含まれるピークに基づいて放射状分布欠陥を識別することを特徴とする請求項5記載の欠陥データ解析方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002282173A JP4310090B2 (ja) | 2002-09-27 | 2002-09-27 | 欠陥データ解析方法及びその装置並びにレビューシステム |
| US10/672,010 US7813539B2 (en) | 2002-09-27 | 2003-09-25 | Method and apparatus for analyzing defect data and a review system |
| US12/888,286 US8116556B2 (en) | 2002-09-27 | 2010-09-22 | Method and apparatus for analyzing defect data and a review system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002282173A JP4310090B2 (ja) | 2002-09-27 | 2002-09-27 | 欠陥データ解析方法及びその装置並びにレビューシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004117229A JP2004117229A (ja) | 2004-04-15 |
| JP4310090B2 true JP4310090B2 (ja) | 2009-08-05 |
Family
ID=32025238
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002282173A Expired - Fee Related JP4310090B2 (ja) | 2002-09-27 | 2002-09-27 | 欠陥データ解析方法及びその装置並びにレビューシステム |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7813539B2 (ja) |
| JP (1) | JP4310090B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8655049B2 (en) | 2010-03-18 | 2014-02-18 | Ricoh Company, Ltd. | Identification method of data point distribution area on coordinate plane and recording medium |
| JP2014167430A (ja) * | 2013-02-28 | 2014-09-11 | Shin Nippon Koki Co Ltd | 欠陥検査システム、欠陥検査プログラムおよび欠陥検査方法 |
Families Citing this family (91)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4310090B2 (ja) * | 2002-09-27 | 2009-08-05 | 株式会社日立製作所 | 欠陥データ解析方法及びその装置並びにレビューシステム |
| US20050197936A1 (en) * | 2004-01-13 | 2005-09-08 | International Business Machines Corporation | Monte Carlo grid scheduling algorithm selection optimization |
| US7603253B2 (en) * | 2004-01-13 | 2009-10-13 | International Business Machines Corporation | Apparatus and method for automatically improving a set of initial return on investment calculator templates |
| US7404164B2 (en) * | 2004-02-04 | 2008-07-22 | International Business Machines Corporation | IC design modeling allowing dimension-dependent rule checking |
| US7373277B1 (en) * | 2004-03-09 | 2008-05-13 | Kla-Tencor Technologies Corp. | Methods and systems for detection of selected defects particularly in relatively noisy inspection data |
| KR100591736B1 (ko) | 2004-07-13 | 2006-06-22 | 삼성전자주식회사 | 기판의 반복 결함 분류 방법 및 장치 |
| US7240306B2 (en) * | 2005-02-24 | 2007-07-03 | International Business Machines Corporation | Integrated circuit layout critical area determination using Voronoi diagrams and shape biasing |
| JP4664708B2 (ja) * | 2005-03-07 | 2011-04-06 | 株式会社東芝 | 欠陥レビューシステム、欠陥レビュー方法、及び電子装置の製造方法 |
| JP4750444B2 (ja) | 2005-03-24 | 2011-08-17 | 株式会社日立ハイテクノロジーズ | 外観検査方法及びその装置 |
| US7570796B2 (en) | 2005-11-18 | 2009-08-04 | Kla-Tencor Technologies Corp. | Methods and systems for utilizing design data in combination with inspection data |
| US8326037B1 (en) | 2005-11-23 | 2012-12-04 | Matrox Electronic Systems, Ltd. | Methods and apparatus for locating an object in an image |
| JP4983006B2 (ja) * | 2005-11-25 | 2012-07-25 | 富士通セミコンダクター株式会社 | 基板検査装置及び方法 |
| US8041100B2 (en) * | 2006-04-25 | 2011-10-18 | Sharp Kabushiki Kaisha | System for specifying equipment causing failure |
| JP4973660B2 (ja) | 2006-06-07 | 2012-07-11 | 株式会社Sumco | 単結晶シリコンウェーハのcop発生要因の判定方法 |
| CN101466876B (zh) * | 2006-06-09 | 2014-12-03 | 上睦可株式会社 | 单晶硅片的cop评价方法 |
| KR100750193B1 (ko) * | 2006-06-16 | 2007-08-17 | 삼성전자주식회사 | 방향성 결함 분류 방법 및 이를 수행하기 위한 장치 |
| JP4928862B2 (ja) * | 2006-08-04 | 2012-05-09 | 株式会社日立ハイテクノロジーズ | 欠陥検査方法及びその装置 |
| FR2911429B1 (fr) * | 2007-01-11 | 2009-04-17 | Soitec Silicon On Insulator | "procede et systeme de detection d'amas de defauts a la surface d'un substrat" |
| US7894659B2 (en) * | 2007-02-28 | 2011-02-22 | Kla-Tencor Technologies Corp. | Methods for accurate identification of an edge of a care area for an array area formed on a wafer and methods for binning defects detected in an array area formed on a wafer |
| KR100828026B1 (ko) * | 2007-04-05 | 2008-05-08 | 삼성전자주식회사 | 집적회로 설계패턴의 레이아웃 수정방법 및 이를 수행하기위한 장치 |
| JP4799574B2 (ja) * | 2008-02-29 | 2011-10-26 | 株式会社東芝 | 線状パターンの検知方法および装置 |
| JP2009238294A (ja) * | 2008-03-26 | 2009-10-15 | Hoya Glass Disk Thailand Ltd | 磁気ディスク用ガラス基板の製造方法、磁気ディスク用ガラス基板および磁気ディスク |
| US7756658B2 (en) | 2008-05-14 | 2010-07-13 | Kla-Tencor Corp. | Systems and methods for detecting defects on a wafer and generating inspection results for the wafer |
| EP2128701A1 (en) * | 2008-05-30 | 2009-12-02 | ASML Netherlands BV | Method of determining defects in a substrate and apparatus for exposing a substrate in a lithographic process |
| US8165837B1 (en) * | 2008-06-09 | 2012-04-24 | Kla-Tencor Corporation | Multi-scale classification of defects |
| KR101841897B1 (ko) | 2008-07-28 | 2018-03-23 | 케이엘에이-텐코어 코오포레이션 | 웨이퍼 상의 메모리 디바이스 영역에서 검출된 결함들을 분류하기 위한 컴퓨터-구현 방법들, 컴퓨터-판독 가능 매체, 및 시스템들 |
| TWI385742B (zh) * | 2008-10-01 | 2013-02-11 | Nupoint Technology Co Ltd | 刮傷樣式的偵測方法與電腦程式產品 |
| US9768082B2 (en) * | 2009-02-13 | 2017-09-19 | Hermes Microvision Inc. | Method and machine for examining wafers |
| US8750557B2 (en) * | 2011-02-15 | 2014-06-10 | Ebay Inc. | Identifying product metadata from an item image |
| US9170211B2 (en) | 2011-03-25 | 2015-10-27 | Kla-Tencor Corp. | Design-based inspection using repeating structures |
| US8666157B2 (en) * | 2011-07-07 | 2014-03-04 | Colorcom, Ltd. | Color segmenting a raster image |
| US9087367B2 (en) | 2011-09-13 | 2015-07-21 | Kla-Tencor Corp. | Determining design coordinates for wafer defects |
| US9098893B2 (en) * | 2011-12-21 | 2015-08-04 | Applied Materials Israel, Ltd. | System, method and computer program product for classification within inspection images |
| CN102607386B (zh) * | 2012-03-30 | 2014-03-05 | 清华大学 | 箱形截面钢构件局部几何初始缺陷测量方法 |
| US8977035B2 (en) * | 2012-06-13 | 2015-03-10 | Applied Materials Israel, Ltd. | System, method and computer program product for detection of defects within inspection images |
| US9355440B1 (en) | 2012-10-10 | 2016-05-31 | Kla-Tencor Corp. | Detection of selected defects in relatively noisy inspection data |
| US9189844B2 (en) | 2012-10-15 | 2015-11-17 | Kla-Tencor Corp. | Detecting defects on a wafer using defect-specific information |
| CN103065012B (zh) * | 2012-12-31 | 2016-08-24 | 中国电子科技集团公司第四十五研究所 | 一种晶圆Map显示模型的创建方法及其使用方法 |
| US9053527B2 (en) | 2013-01-02 | 2015-06-09 | Kla-Tencor Corp. | Detecting defects on a wafer |
| US9134254B2 (en) | 2013-01-07 | 2015-09-15 | Kla-Tencor Corp. | Determining a position of inspection system output in design data space |
| US9311698B2 (en) * | 2013-01-09 | 2016-04-12 | Kla-Tencor Corp. | Detecting defects on a wafer using template image matching |
| US9092846B2 (en) | 2013-02-01 | 2015-07-28 | Kla-Tencor Corp. | Detecting defects on a wafer using defect-specific and multi-channel information |
| US9865512B2 (en) | 2013-04-08 | 2018-01-09 | Kla-Tencor Corp. | Dynamic design attributes for wafer inspection |
| US9310320B2 (en) | 2013-04-15 | 2016-04-12 | Kla-Tencor Corp. | Based sampling and binning for yield critical defects |
| TWI534646B (zh) * | 2013-05-20 | 2016-05-21 | 敖翔科技股份有限公司 | 智慧型弱點圖形診斷方法、系統與電腦可讀取記憶媒體 |
| TWI483216B (zh) * | 2013-08-16 | 2015-05-01 | 國立清華大學 | 晶圓圖之分析系統及其分析方法 |
| US9442077B2 (en) * | 2013-08-28 | 2016-09-13 | Kla-Tencor Corp. | Scratch filter for wafer inspection |
| US10373301B2 (en) * | 2013-09-25 | 2019-08-06 | Sikorsky Aircraft Corporation | Structural hot spot and critical location monitoring system and method |
| US9449788B2 (en) | 2013-09-28 | 2016-09-20 | Kla-Tencor Corporation | Enhanced defect detection in electron beam inspection and review |
| JP6391281B2 (ja) * | 2014-04-22 | 2018-09-19 | キヤノン株式会社 | 光学検査方法、光学検査装置、および光学部材の製造方法 |
| TW201546468A (zh) * | 2014-06-11 | 2015-12-16 | Signality System Engineering Co Ltd | 晶圓測試數據圖形化判讀系統 |
| US10712289B2 (en) * | 2014-07-29 | 2020-07-14 | Kla-Tencor Corp. | Inspection for multiple process steps in a single inspection process |
| US9286675B1 (en) * | 2014-10-23 | 2016-03-15 | Applied Materials Israel Ltd. | Iterative defect filtering process |
| US10861147B2 (en) | 2015-01-13 | 2020-12-08 | Sikorsky Aircraft Corporation | Structural health monitoring employing physics models |
| CN105279756B (zh) * | 2015-10-19 | 2018-06-12 | 天津理工大学 | 基于自适应区域分割的缺口圆弧零件尺寸视觉检测方法 |
| KR20170046998A (ko) * | 2015-10-22 | 2017-05-04 | 삼성전자주식회사 | 웨이퍼 검사 장치 |
| CN106067427B (zh) * | 2016-05-25 | 2019-03-26 | 上海华力微电子有限公司 | 局部曝光异常缺陷自动检测方法 |
| US9891267B2 (en) * | 2016-06-14 | 2018-02-13 | Nxp Usa, Inc. | Kernel based cluster fault analysis |
| CN106056923B (zh) * | 2016-06-27 | 2018-08-14 | 安徽四创电子股份有限公司 | 基于交通场面雷达的路段交通状态判别方法 |
| US10902576B2 (en) * | 2016-08-12 | 2021-01-26 | Texas Instruments Incorporated | System and method for electronic die inking after automatic visual defect inspection |
| US10249033B1 (en) | 2016-12-20 | 2019-04-02 | Palantir Technologies Inc. | User interface for managing defects |
| US10620618B2 (en) * | 2016-12-20 | 2020-04-14 | Palantir Technologies Inc. | Systems and methods for determining relationships between defects |
| EP4148593A1 (en) | 2017-02-27 | 2023-03-15 | QlikTech International AB | Methods and systems for extracting and visualizing patterns in large-scale data sets |
| KR102440695B1 (ko) | 2017-08-11 | 2022-09-05 | 삼성전자주식회사 | 웨이퍼 맵 분석 장치, 이를 이용한 웨이퍼 맵 분석 방법 및 반도체 장치 제조 방법 |
| US11314721B1 (en) | 2017-12-07 | 2022-04-26 | Palantir Technologies Inc. | User-interactive defect analysis for root cause |
| US10557802B2 (en) * | 2018-05-09 | 2020-02-11 | Kla-Tencor Corporation | Capture of repeater defects on a semiconductor wafer |
| US10605745B2 (en) * | 2018-06-28 | 2020-03-31 | Applied Materials Israel Ltd. | Guided inspection of a semiconductor wafer based on systematic defects |
| JP7137977B2 (ja) * | 2018-07-05 | 2022-09-15 | 東京エレクトロン株式会社 | 基板処理装置及び基板処理方法 |
| US11797572B1 (en) * | 2018-08-07 | 2023-10-24 | Amazon Technologies, Inc. | Systems, methods, and apparatus for hotspot detection |
| US10818001B2 (en) * | 2018-09-07 | 2020-10-27 | Kla-Tencor Corporation | Using stochastic failure metrics in semiconductor manufacturing |
| EP3889801A4 (en) * | 2018-11-29 | 2022-01-26 | FUJIFILM Corporation | SYSTEM FOR EVALUATION OF CAUSE OF DAMAGE TO A STRUCTURE, METHOD OF EVALUATION OF CAUSE OF DAMAGE AND SERVER FOR EVALUATION OF CAUSE OF DAMAGE |
| JP2020153854A (ja) * | 2019-03-20 | 2020-09-24 | 株式会社Screenホールディングス | 基板検査装置、基板処理装置、基板検査方法および基板処理方法 |
| CN109934821B (zh) * | 2019-03-22 | 2021-06-25 | 成都睿琪科技有限责任公司 | 一种零件缺陷检测方法及系统 |
| CN110412037A (zh) * | 2019-07-04 | 2019-11-05 | 盎古(上海)科技有限公司 | 一种织物疵点信息处理方法和装置 |
| JP7324116B2 (ja) * | 2019-10-15 | 2023-08-09 | キヤノン株式会社 | 異物検査装置および異物検査方法 |
| CN111260631B (zh) * | 2020-01-16 | 2023-05-05 | 成都地铁运营有限公司 | 一种高效刚性接触线结构光光条提取方法 |
| JP7565715B2 (ja) | 2020-06-24 | 2024-10-11 | 東京エレクトロン株式会社 | 基板処理システム、基板処理方法、およびマップ作成装置 |
| CN112669307A (zh) * | 2021-01-06 | 2021-04-16 | 大冶特殊钢有限公司 | 基于机器视觉的低倍酸蚀缺陷自动识别与评级的方法及系统 |
| CN112991284B (zh) * | 2021-03-05 | 2022-11-01 | 佛山科学技术学院 | 一种温控器导向架缺陷检测方法及系统 |
| WO2023050275A1 (zh) * | 2021-09-30 | 2023-04-06 | 京东方科技集团股份有限公司 | 数据处理方法、系统和计算机可读存储介质 |
| JP7555896B2 (ja) * | 2021-09-30 | 2024-09-25 | 株式会社日立ハイテク | 荷電粒子線画像処理装置とそれを備える荷電粒子線装置 |
| CN114141649B (zh) * | 2021-11-29 | 2025-10-10 | 上海华力微电子有限公司 | 一种增强特殊分布缺陷检测的方法 |
| CN115272185B (zh) * | 2022-06-22 | 2026-02-03 | 上海众壹云计算科技有限公司 | 一种单元化的掩膜版缺陷的识别方法及识别装置 |
| CN115147429B (zh) * | 2022-09-07 | 2022-11-08 | 深圳市欣冠精密技术有限公司 | 用于光学玻璃预制件的条纹检测方法 |
| CN115731231B (zh) * | 2022-12-06 | 2025-11-21 | 杭州安脉盛智能技术有限公司 | 一种圆形金属边缘缺陷检测方法、装置、设备及存储介质 |
| CN116563424A (zh) * | 2023-04-21 | 2023-08-08 | 江苏道达智能科技有限公司 | 一种基于OpenTK大数据量晶圆缺陷图的绘制分析方法 |
| CN117197617B (zh) * | 2023-09-19 | 2024-05-28 | 芯率智能科技(苏州)有限公司 | 一种重复缺陷的缺陷分类方法及系统 |
| CN117272122B (zh) * | 2023-11-20 | 2024-04-02 | 全芯智造技术有限公司 | 晶圆异常的共性分析方法及装置、可读存储介质、终端 |
| CN118380344B (zh) * | 2024-06-21 | 2024-11-15 | 杭州广立微电子股份有限公司 | 晶圆重复缺陷检测方法、装置、电子装置和存储介质 |
| CN119624926B (zh) * | 2024-12-03 | 2026-03-06 | 北京中科光析科学技术研究所山东分所 | 一种联合图像分析处理技术的探伤在线缺陷检测方法及系统 |
| CN121366158B (zh) * | 2025-12-19 | 2026-03-17 | 杭州光研科技有限公司 | 一种晶圆贯穿划痕检测方法及系统 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5240866A (en) * | 1992-02-03 | 1993-08-31 | At&T Bell Laboratories | Method for characterizing failed circuits on semiconductor wafers |
| US6009545A (en) * | 1995-04-25 | 1999-12-28 | Mitsubishi Denki Kabushiki Kaisha | System for analyzing a failure in a semiconductor wafer by calculating correlation coefficient between collated data of defects per prescribed unit and failures per prescribed unit |
| US5991699A (en) * | 1995-05-04 | 1999-11-23 | Kla Instruments Corporation | Detecting groups of defects in semiconductor feature space |
| US5982920A (en) * | 1997-01-08 | 1999-11-09 | Lockheed Martin Energy Research Corp. Oak Ridge National Laboratory | Automated defect spatial signature analysis for semiconductor manufacturing process |
| JPH10214866A (ja) | 1997-01-28 | 1998-08-11 | Hitachi Ltd | 不良解析方法および装置 |
| US6130959A (en) * | 1997-07-16 | 2000-10-10 | Cognex Corporation | Analyzing an image of an arrangement of discrete objects |
| JPH1145919A (ja) | 1997-07-24 | 1999-02-16 | Hitachi Ltd | 半導体基板の製造方法 |
| JPH11328408A (ja) * | 1998-05-12 | 1999-11-30 | Advantest Corp | データ処理装置および方法、情報記憶媒体 |
| US6366690B1 (en) * | 1998-07-07 | 2002-04-02 | Applied Materials, Inc. | Pixel based machine for patterned wafers |
| JP3812185B2 (ja) * | 1998-12-01 | 2006-08-23 | 株式会社日立製作所 | 欠陥分類方法およびその装置 |
| JP4014379B2 (ja) * | 2001-02-21 | 2007-11-28 | 株式会社日立製作所 | 欠陥レビュー装置及び方法 |
| JP4310090B2 (ja) * | 2002-09-27 | 2009-08-05 | 株式会社日立製作所 | 欠陥データ解析方法及びその装置並びにレビューシステム |
| US7412090B2 (en) * | 2004-09-09 | 2008-08-12 | Powerchip Semiconductor Corp. | Method of managing wafer defects |
-
2002
- 2002-09-27 JP JP2002282173A patent/JP4310090B2/ja not_active Expired - Fee Related
-
2003
- 2003-09-25 US US10/672,010 patent/US7813539B2/en active Active
-
2010
- 2010-09-22 US US12/888,286 patent/US8116556B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8655049B2 (en) | 2010-03-18 | 2014-02-18 | Ricoh Company, Ltd. | Identification method of data point distribution area on coordinate plane and recording medium |
| JP2014167430A (ja) * | 2013-02-28 | 2014-09-11 | Shin Nippon Koki Co Ltd | 欠陥検査システム、欠陥検査プログラムおよび欠陥検査方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110013825A1 (en) | 2011-01-20 |
| US20040064269A1 (en) | 2004-04-01 |
| JP2004117229A (ja) | 2004-04-15 |
| US8116556B2 (en) | 2012-02-14 |
| US7813539B2 (en) | 2010-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4310090B2 (ja) | 欠陥データ解析方法及びその装置並びにレビューシステム | |
| JP4038356B2 (ja) | 欠陥データ解析方法及びその装置並びにレビューシステム | |
| JP4521386B2 (ja) | 欠陥データ解析方法およびその装置 | |
| US8068662B2 (en) | Method and system for determining a defect during charged particle beam inspection of a sample | |
| US8582864B2 (en) | Fault inspection method | |
| US7756658B2 (en) | Systems and methods for detecting defects on a wafer and generating inspection results for the wafer | |
| KR102083706B1 (ko) | 반도체 검사 레시피 생성, 결함 리뷰 및 계측을 위한 적응적 샘플링 | |
| US6775817B2 (en) | Inspection system and semiconductor device manufacturing method | |
| JP6078234B2 (ja) | 荷電粒子線装置 | |
| JP2000137804A (ja) | デジタル画像の異常検出方法およびシステム、ならびにそのための記憶媒体 | |
| US8121397B2 (en) | Method and its apparatus for reviewing defects | |
| JPH1089931A (ja) | パターン検査方法及びその装置並びに半導体ウエハの製造方法 | |
| US11017522B2 (en) | Inspection and cleaning system and method for the same | |
| CN114365183A (zh) | 晶片检验方法和系统 | |
| US20190026419A1 (en) | Method and system for quickly diagnosing, classifying, and sampling in-line defects based on caa pre-diagnosis database | |
| JP2009071271A (ja) | パターン形状評価方法,パターン形状評価装置,パターン形状評価データ生成装置およびそれを用いた半導体形状評価システム | |
| JPH1173509A (ja) | 画像情報認識装置および画像情報認識方法 | |
| JP2001099625A (ja) | パターン検査装置およびパターン検査方法 | |
| CN121962030A (zh) | 一种基于视觉检测的半导体晶圆失效分析方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20040907 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050707 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20060512 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080303 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080513 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080714 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090323 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090421 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090511 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120515 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120515 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130515 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130515 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |