JP6510570B2 - 画像処理装置 - Google Patents
画像処理装置 Download PDFInfo
- Publication number
- JP6510570B2 JP6510570B2 JP2017007770A JP2017007770A JP6510570B2 JP 6510570 B2 JP6510570 B2 JP 6510570B2 JP 2017007770 A JP2017007770 A JP 2017007770A JP 2017007770 A JP2017007770 A JP 2017007770A JP 6510570 B2 JP6510570 B2 JP 6510570B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- ultrasonic probe
- unit
- dimensional
- acquisition unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Description
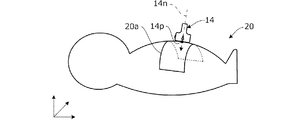
(1)画像処理装置(装置)10は、測定対象20を測定して得られる測定データ14dを処理して3次元データ14e3を生成する画像処理装置であって、測定データ14dを取得する取得部(一例として、超音波プローブ14)と、測定対象20および超音波プローブ14の位置および姿勢をそれぞれ追跡しつつ検出する検出部(一例として、距離画像センサ16)と、距離画像センサ16によって検出された測定対象20および超音波プローブ14の位置および姿勢に基づいて、測定対象20(測定領域20a)に対する超音波プローブ14の位置14pおよび方向14nを算出する位置方向算出部121と、超音波プローブ14によって取得された測定データ14dと、位置方向算出部121によって算出された測定領域20aに対する超音波プローブ14の位置14pおよび方向14nとに基づいて、3次元データ14e3を生成する3次元データ生成部123と、を備える。
Claims (4)
- 測定対象を測定して得られる測定データを処理して3次元画像データを生成する画像処理装置であって、
前記測定データを取得する取得部と、
前記測定対象および前記取得部の位置および姿勢をそれぞれ追跡しつつ検出する検出部と、
前記検出部によって検出された前記測定対象および前記取得部の位置および姿勢に基づいて、前記測定対象に対する前記取得部の位置および姿勢を算出する算出部と、
前記取得部によって取得された前記測定データと、前記算出部によって算出された前記測定対象に対する前記取得部の位置および姿勢とに基づいて、前記3次元画像データを生成する生成部と、を備えることを特徴とする画像処理装置。 - 請求項1に記載の画像処理装置であって、
前記取得部は、前記測定対象を走査しながら超音波を送受信する超音波プローブであることを特徴とする画像処理装置。 - 請求項2に記載の画像処理装置であって、
前記測定対象は生体であり、
前記検出部は、前記測定対象に対する前記取得部の押し込みの程度をさらに検出し、
前記生成部は、前記取得部によって取得された前記測定データと、前記算出部によって算出された前記測定対象に対する前記取得部の位置および姿勢と、前記検出部によって検出された前記測定対象に対する前記取得部の押し込みの程度と、に基づいて、前記3次元画像データを生成することを特徴とする画像処理装置。 - 請求項1〜3のいずれか1項に記載の画像処理装置であって、
前記検出部は、前記測定対象および前記取得部を検出領域に含むように配置された単一の距離画像センサであることを特徴とする画像処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017007770A JP6510570B2 (ja) | 2017-01-19 | 2017-01-19 | 画像処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017007770A JP6510570B2 (ja) | 2017-01-19 | 2017-01-19 | 画像処理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018114166A JP2018114166A (ja) | 2018-07-26 |
| JP2018114166A5 JP2018114166A5 (ja) | 2019-01-24 |
| JP6510570B2 true JP6510570B2 (ja) | 2019-05-08 |
Family
ID=62983509
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017007770A Active JP6510570B2 (ja) | 2017-01-19 | 2017-01-19 | 画像処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6510570B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7538705B2 (ja) * | 2020-12-08 | 2024-08-22 | 富士フイルムヘルスケア株式会社 | 超音波診断システム及び操作支援方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000126180A (ja) * | 1998-10-27 | 2000-05-09 | Mitani Sangyo Co Ltd | 3次元画像取得装置及び3次元画像取得方法 |
| JP2010131053A (ja) * | 2008-12-02 | 2010-06-17 | Konica Minolta Medical & Graphic Inc | 超音波画像診断システムおよび超音波画像診断システムを動作させるプログラム |
| JP2014124309A (ja) * | 2012-12-26 | 2014-07-07 | Toshiba Corp | 超音波診断装置 |
| EP2991557A1 (en) * | 2013-04-30 | 2016-03-09 | Tractus Corporation | Hand-held imaging devices with position and/or orientation sensors for complete examination of tissue |
| JP5410629B1 (ja) * | 2013-05-14 | 2014-02-05 | 健司 三木 | 超音波診断システム、画像処理装置およびその制御方法と制御プログラム |
| JP6125368B2 (ja) * | 2013-08-05 | 2017-05-10 | 東芝メディカルシステムズ株式会社 | 医用機器操作支援装置及び超音波診断装置 |
| JP2015116215A (ja) * | 2013-12-16 | 2015-06-25 | 日立アロカメディカル株式会社 | 超音波診断装置及びプログラム |
| WO2015113807A1 (en) * | 2014-01-29 | 2015-08-06 | Koninklijke Philips N.V. | System and method for imaging using ultrasound |
| CN105433977B (zh) * | 2014-07-31 | 2020-02-07 | 东芝医疗系统株式会社 | 医学成像系统、手术导引系统以及医学成像方法 |
-
2017
- 2017-01-19 JP JP2017007770A patent/JP6510570B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018114166A (ja) | 2018-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9113817B2 (en) | System for locating anatomical objects in ultrasound imaging | |
| CN108430334B (zh) | 用于检查对象的体积的超声成像装置和超声成像方法 | |
| CN107647880B (zh) | 医用图像处理装置以及医用图像处理方法 | |
| US11064979B2 (en) | Real-time anatomically based deformation mapping and correction | |
| US9974618B2 (en) | Method for determining an imaging specification and image-assisted navigation as well as device for image-assisted navigation | |
| KR102615722B1 (ko) | 초음파 스캐너 및 초음파 스캐너에서의 조준 가이드 방법 | |
| JP2014121434A (ja) | 超音波診断装置およびその収集状態表示方法 | |
| KR102406937B1 (ko) | 초음파 영상장치 및 그 제어 방법 | |
| JP5015580B2 (ja) | 超音波診断装置及びレポート画像作成方法 | |
| JP6865695B2 (ja) | 超音波撮像装置 | |
| JP6510570B2 (ja) | 画像処理装置 | |
| KR102694726B1 (ko) | 방광내 요량 측정용 초음파 스캐너 | |
| US11241172B2 (en) | Ultrasonic diagnostic apparatus and method of controlling the same | |
| KR102598211B1 (ko) | 방광내 요량 측정용 초음파 스캐너 | |
| US20160192904A1 (en) | Apparatus and method for measuring an amount of urine in a bladder | |
| US20150182198A1 (en) | System and method for displaying ultrasound images | |
| JP2009045097A (ja) | 三次元画像生成装置及び三次元画像生成方法 | |
| JP2017018510A (ja) | 超音波診断装置及びその画像形成方法 | |
| JP2006081640A (ja) | 超音波撮像装置、画像処理装置およびプログラム | |
| JP6224341B2 (ja) | 固定具及び超音波診断装置 | |
| JPS5819240A (ja) | 核磁気共鳴現象を用いた検査装置 | |
| JP5421349B2 (ja) | 超音波診断装置及びレポート画像作成方法 | |
| KR102909819B1 (ko) | 패닝 가이드 기능을 갖는 3d 초음파 스캐너 및 3d 초음파 스캔 방법 | |
| JP2016036684A (ja) | 超音波診断装置 | |
| JP6203514B2 (ja) | 超音波診断装置及びその制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181207 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181207 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20181207 |
|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190220 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190404 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6510570 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |