JP6802129B2 - 情報処理装置、方法及びプログラム - Google Patents
情報処理装置、方法及びプログラム Download PDFInfo
- Publication number
- JP6802129B2 JP6802129B2 JP2017167508A JP2017167508A JP6802129B2 JP 6802129 B2 JP6802129 B2 JP 6802129B2 JP 2017167508 A JP2017167508 A JP 2017167508A JP 2017167508 A JP2017167508 A JP 2017167508A JP 6802129 B2 JP6802129 B2 JP 6802129B2
- Authority
- JP
- Japan
- Prior art keywords
- area
- objects
- overlap
- unit
- information processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Image Generation (AREA)
Description
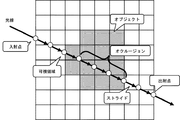
(手順2)当該光線と対象シーンのバウンディングボックス(bounding box)(空間内に設定する直方体の所定領域であって判定用のボクセル分割が施されているもの)に対する交差点として、入射点(光線の入る交差点)及び出射点(光線の出る交差点)を決定する。図1ではバウンディングボックスが模式的に碁盤目状に描かれると共に、一例の光線における入射点及び出射点が示されている。
(手順3)当該光線上でボクセル境界にある各点に関して、入射点から順次、出射点側の隣接点をスキャンしていくことで、最初に3Dモデル(すなわちオブジェクト)に交差する点を可視領域の点と判定し、当該点よりも先にある各点はオクルージョンが発生していると判定する。図1では一例の光線及びグレーで示すオブジェクトに対して、可視領域判定された点とその先のオクルージョン判定された点とが示されている。
投影部1では、そのモデルデータが入力される複数の3Dオブジェクトに関して、所定カメラ配置での逆投影を行うことで、重複マップを求める。周知のように逆投影とは、与えられた3Dモデルが所定カメラ配置における画像においてどのように分布するかを明らかにする処理である。図3の[1]の例では4つの3DオブジェクトM1〜M4(それぞれIDとしてIdi=1〜4が付与されている)を所定配置にあるカメラCに逆投影することで、その画像領域に重複度マップOMを得ることが示されている。さらに図3の[2]に示すよ
うに、当該得られた重複度マップOMは画像領域内での3Dオブジェクトの重複度(重複している個数)の分布を与えるものとなっている。図3の[2]では当該重複度の具体例が説明のための吹き出しによって示されており、3Dオブジェクトが全く逆投影されない背景領域に関しては「重複度=0」であり、3DオブジェクトM3やM4等が1個だけ逆投影された領域に関して「重複度=1」となり、2個の3DオブジェクトのM3,M4のそれぞれ一部が互いに重複している領域に関して「重複度=2」となることが例として示されている。

(1) 各頂点データ{Pi x, Pi y, Pi z}としての3Dオブジェクトのモデルデータは用意しておく。
(2) 当該モデルデータ内において個別の3Dオブジェクトの区別(セグメント結果)も予め与えておく。すなわち、各頂点データ{Pi x, Pi y, Pi z}に関して、M個のいずれのオブジェクトに属するものかの区別を予め与えておく。
(3) 当該頂点データへの区別を与えておくための個別のオブジェクトに関してもID(式Idiで表記することとする)を与えておく。
(4) 投影行列T34及び投影するカメラ位置{Cx, Cy, Cz}は既知のものとして定義しておく。
(5) モデルデータとしての3Dオブジェクトの各頂点データ{Pi x, Pi y, Pi z}はその密度が十分に高く、互いに隣接する2つの頂点v1,v2を式(1)で逆投影した場合には、同一の画像座標(u,v)に投影されるか、又は十分に近傍となる座標に投影される。例えば座標(u,v)と、その隣接座標である(u±1,v)又は(u, v±1)のいずれかとに投影される。
抽出部2では、重複度マップから重複領域をそれぞれ識別して抽出する。具体的には、重複度マップのうち重複度が2以上となっている点を前景とみなし、それ以外の重複度が1以下となっている点を背景とみなすことで重複度マップを2値画像とみなしたものに対して、任意の領域分割手法を適用することにより、前景として重複度が2以上になっている領域をそれぞれ重複領域として識別して抽出する。例えば、以下の式で模式的に示すように連結領域ラベリングCCLの適用により、前景を構成している各座標(u,v)に関して属する連結領域のIDであるIdaA(u,v)を得るようにしてよい。ここで、CCL{}はプログラミング等の表現における関数等としてCCLを適用する処理を表現している。
IdA(u,v)=CCL{overlapMap(u,v)} (2)
特定部31は、各重複箇所に対して、いずれの3Dオブジェクトのいずれの部分領域が対応しているか、すなわち逆投影されるものであるかをオクルージョン発生原因の候補として特定する。ここで、一実施形態では当該特定を、投影部1で既に逆投影しておいた際の結果(いずれの3Dオブジェクトが(u,v)に逆投影されたかの結果)を各画素位置(u,v)において記憶しておいたものを参照することによって実現するようにしてもよい。
計算部32では、特定部31において重複領域ごとに特定されたオクルージョン発生候補となる複数の3Dオブジェクトの部分領域に関して、特定部31(及び投影部1)での逆投影の際のカメラ中心との位置関係を計算する。一実施形態では、カメラ中心と各3Dオブジェクトの部分領域における各点との平均の距離(オイラー距離など)として、当該位置関係を計算してよい。(なお、当該平均距離はカメラ中心(1点)と各3Dオブジェクトの部分領域における各点i=1,2,..., M(Mは当該3Dオブジェクトの部分領域の点の総数)との距離をD(i)(i=1,2, ..., M)として、当該各距離D(i)をM個の点に関して総和したものを当該個数Mで割ったものとして求めればよい。)
遮蔽判定部32では、計算部31で計算された位置関係に基づき、重複領域ごとに特定されたオクルージョン発生候補となる複数の3Dオブジェクトの部分領域のうち、実際にオクルージョンを発生されているものを特定する。具体的には、当該位置関係においてカメラ中心に最も近いと判定されるもの以外をオクルージョンを発生させているものとして特定する。計算部31で式(3),(4)の平均オイラー距離で位置関係を計算したのであれば、当該距離が最小となるもの以外を、オクルージョンを発生させているものとして特定する。
Claims (6)
- 3Dオブジェクトのモデルデータを所定のカメラ配置における画像領域に逆投影し、画像領域の各点における3Dオブジェクトが投影されている数である重複度を与えた重複マップを得る投影部と、
前記重複マップの重複度が2以上となる領域をそれぞれ重複領域として抽出する抽出部と、
前記重複領域に対応する2以上の3Dオブジェクト毎の領域を特定し、当該領域の中からカメラ中心との位置関係に基づいて前記所定カメラ配置においてオクルージョンを発生させるものを判定する判定部と、
を備えることを特徴とする情報処理装置。 - 前記抽出部では、連結領域ラベリング法その他の領域分割法によって抽出することを特徴とする請求項1に記載の情報処理装置。
- 前記判定部では、前記重複領域のそれぞれに再度、前記複数の3Dオブジェクトのモデルデータを前記逆投影することによって、前記特定することを特徴とする請求項1または2に記載の情報処理装置。
- 前記判定部では、前記領域のうちカメラ中心からの距離が最小となるもの以外を前記所定カメラ配置においてオクルージョンを発生させるものとして判定することを特徴とする請求項1ないし3のいずれかに記載の情報処理装置。
- 3Dオブジェクトのモデルデータを所定のカメラ配置における画像領域に逆投影し、画像領域の各点における3Dオブジェクトが投影されている数である重複度を与えた重複マップを得る投影段階と、
前記重複マップの重複度が2以上となる領域をそれぞれ重複領域として抽出する抽出段階と、
前記重複領域に対応する2以上の3Dオブジェクト毎の領域を特定し、当該領域の中からカメラ中心との位置関係に基づいて前記所定カメラ配置においてオクルージョンを発生させるものを判定する判定段階と、を備えることを特徴とする方法。 - コンピュータを、
3Dオブジェクトのモデルデータを所定のカメラ配置における画像領域に逆投影し、画像領域の各点における3Dオブジェクトが投影されている数である重複度を与えた重複マップを得る投影部と、
前記重複マップの重複度が2以上となる領域をそれぞれ重複領域として抽出する抽出部と、
前記重複領域に対応する2以上の3Dオブジェクト毎の領域を特定し、当該領域の中からカメラ中心との位置関係に基づいて前記所定カメラ配置においてオクルージョンを発生させるものを判定する判定部と、を備えることを特徴とする情報処理装置として機能させるプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017167508A JP6802129B2 (ja) | 2017-08-31 | 2017-08-31 | 情報処理装置、方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017167508A JP6802129B2 (ja) | 2017-08-31 | 2017-08-31 | 情報処理装置、方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019046080A JP2019046080A (ja) | 2019-03-22 |
| JP6802129B2 true JP6802129B2 (ja) | 2020-12-16 |
Family
ID=65814413
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017167508A Active JP6802129B2 (ja) | 2017-08-31 | 2017-08-31 | 情報処理装置、方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6802129B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7078564B2 (ja) * | 2019-02-21 | 2022-05-31 | Kddi株式会社 | 画像処理装置及びプログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05120449A (ja) * | 1991-01-28 | 1993-05-18 | Ricoh Co Ltd | 画像処理装置 |
| JP3733493B2 (ja) * | 1996-04-09 | 2006-01-11 | 株式会社ディジタルメディアプロフェッショナル | 画像合成回路 |
| JP2882465B2 (ja) * | 1995-12-25 | 1999-04-12 | 日本電気株式会社 | 画像生成方法およびその装置 |
| JP6491517B2 (ja) * | 2015-03-31 | 2019-03-27 | Kddi株式会社 | 画像認識ar装置並びにその姿勢推定装置及び姿勢追跡装置 |
| JP6516646B2 (ja) * | 2015-09-30 | 2019-05-22 | Kddi株式会社 | 複数のカメラで撮影した画像から個々の被写体を識別する識別装置、識別方法及びプログラム |
| JP6579950B2 (ja) * | 2015-12-24 | 2019-09-25 | Kddi株式会社 | カメラの撮影画像に映る人物を検出する画像解析装置、プログラム及び方法 |
-
2017
- 2017-08-31 JP JP2017167508A patent/JP6802129B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019046080A (ja) | 2019-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112465938B (zh) | 三维3d渲染方法和装置 | |
| US9842424B2 (en) | Volume rendering using adaptive buckets | |
| KR102197067B1 (ko) | 멀티 프레임들의 동일한 영역을 연속으로 렌더링하는 방법 및 장치 | |
| CN111788608B (zh) | 用于建模光反射的混合射线跟踪方法 | |
| Brabec et al. | Shadow volumes on programmable graphics hardware | |
| US12394140B2 (en) | Sub-pixel data simulation system | |
| JP5055214B2 (ja) | 画像処理装置、画像処理方法 | |
| US9208610B2 (en) | Alternate scene representations for optimizing rendering of computer graphics | |
| CN106558090A (zh) | 3d渲染和阴影信息存储方法和设备 | |
| WO2023179091A1 (zh) | 三维模型渲染方法、装置、设备、存储介质及程序产品 | |
| CN117274542A (zh) | 用于生成混合现实中的动态虚拟内容的设备和方法 | |
| US11436797B2 (en) | Image generation system and method | |
| KR20160068204A (ko) | 메시 지오메트리를 위한 데이터 처리 방법 및 이를 기록한 컴퓨터 판독 가능 저장 매체 | |
| CN119280805B (zh) | 游戏场景切换方法、装置、设备及介质 | |
| WO2024037116A1 (zh) | 三维模型的渲染方法、装置、电子设备及存储介质 | |
| KR102558739B1 (ko) | 3d 렌더링 방법 및 장치 | |
| US20260024277A1 (en) | Virtual picture generation method and apparatus, electronic device, computer-readable storage medium, and computer program product | |
| KR101467735B1 (ko) | 볼륨데이터를 위한 4차원 실시간 렌더링 방법 및 장치 | |
| JP2014006901A (ja) | 関与媒質により受光された光量を推定する方法及び対応する装置 | |
| Wiemann et al. | Automatic Map Creation For Environment Modelling In Robotic Simulators. | |
| JP6802129B2 (ja) | 情報処理装置、方法及びプログラム | |
| JP6487578B1 (ja) | プログラム、記録媒体、及び影描画方法 | |
| Lee et al. | A bimodal empty space skipping of ray casting for terrain data | |
| WO2023184139A1 (en) | Methods and systems for rendering three-dimensional scenes | |
| KR100624455B1 (ko) | 3차원 그래픽스 환경에서의 라이트맵 처리 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190823 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200909 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6802129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |