JP7046880B2 - 手術器具 - Google Patents
手術器具 Download PDFInfo
- Publication number
- JP7046880B2 JP7046880B2 JP2019177054A JP2019177054A JP7046880B2 JP 7046880 B2 JP7046880 B2 JP 7046880B2 JP 2019177054 A JP2019177054 A JP 2019177054A JP 2019177054 A JP2019177054 A JP 2019177054A JP 7046880 B2 JP7046880 B2 JP 7046880B2
- Authority
- JP
- Japan
- Prior art keywords
- adapter
- substrate
- surgical instrument
- holding member
- movable member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Manipulator (AREA)
Description
この発明の第2の局面による手術器具は、ロボット手術システムのロボットアームにアダプタを介して取り外し可能に接続される手術器具であって、アダプタに対する取付面を有する基体と、一方端が基体に接続された細長形状のシャフトと、シャフトの他方端に接続された処置具と、基体に回転可能に設けられ、処置具を操作するための細長要素の端部が接続された複数の被駆動部材と、一方端が基体により保持された複数の被駆動部材の他方端を回転可能に保持する保持部材と、保持部材および基体に対して移動可能に設けられ、アダプタに係合する可動部材と、を備え、可動部材は、保持部材および基体に対して移動することにより、アダプタとの係合が解除されるように構成されており、保持部材は、基体に対して係合するとともに、被駆動部材の端部を留め具により保持することにより、基体に固定されている。
この発明の第3の局面による手術器具は、ロボット手術システムのロボットアームにアダプタを介して取り外し可能に接続される手術器具であって、アダプタに対する取付面を有する基体と、一方端が基体に接続された細長形状のシャフトと、シャフトの他方端に接続された処置具と、基体に回転可能に設けられ、処置具を操作するための細長要素の端部が接続された複数の被駆動部材と、一方端が基体により保持された複数の被駆動部材の他方端を回転可能に保持する保持部材と、保持部材および基体に対して移動可能に設けられ、アダプタに係合する可動部材と、を備え、可動部材は、保持部材および基体に対して移動することにより、アダプタとの係合が解除されるように構成されており、可動部材は、押圧操作される押圧部と、アダプタに係合する係合部とを含み、基体には、外部から係合部に通じる開口部が設けられている。
この発明の第4の局面による手術器具は、ロボット手術システムのロボットアームにアダプタを介して取り外し可能に接続される手術器具であって、アダプタに対する取付面を有する基体と、一方端が基体に接続された細長形状のシャフトと、シャフトの他方端に接続された処置具と、基体に回転可能に設けられ、処置具を操作するための細長要素の端部が接続された複数の被駆動部材と、一方端が基体により保持された複数の被駆動部材の他方端を回転可能に保持する保持部材と、保持部材および基体に対して移動可能に設けられ、アダプタに係合する可動部材と、を備え、可動部材は、保持部材および基体に対して移動することにより、アダプタとの係合が解除されるように構成されており、アダプタは、第1部材と、第2付勢部材を介して第1部材に対して移動可能に設けられた第2部材とを有し、被駆動部材に係合するように設けられた駆動伝達部材を含み、可動部材は、アダプタとの係合が解除されるように移動されることにより、駆動伝達部材の第1部材を被駆動部材と遠ざかる方向に移動させて、駆動伝達部材と被駆動部材との係合を解除する押下げ部を含む。
図1および図2を参照して、一実施形態によるロボット手術システム100の構成について説明する。
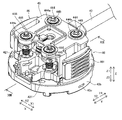
図3~図15を参照して、一実施形態によるアダプタ60および手術器具40の構成について説明する。
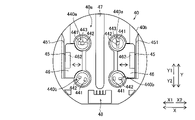
図9~図11に示すように、手術器具40の可動部材46は、押圧部461と、係合穴462と、側壁463と、押下げ部464と、一対のガイド部465と、凹部466とを含んでいる。また、可動部材46は、付勢部材467を挟み込むようにして、基体40bおよび保持部材49に取り付けられている。可動部材46は、図14および図15に示すように、付勢部材467により案内溝45の幅を狭める方向(外側方向)に付勢されている。可動部材46は、押圧部461を作業者が押すことにより、案内溝45の幅を広げる方向(内側方向)に移動する。具体的には、X1方向側の可動部材46は、付勢部材467によりX1方向側に付勢されている。また、X1方向側の可動部材46は、X2方向側に押されることにより、付勢力に抗してX2方向側に移動する。また、X2方向側の可動部材46は、付勢部材467によりX2方向側に付勢されている。また、X2方向側の可動部材46は、X1方向側に押されることにより、付勢力に抗してX1方向側に移動する。なお、係合穴462は、特許請求の範囲の「係合部」の一例である。また、付勢部材467は、特許請求の範囲の「第1付勢部材」の一例である。
図12に示すように、手術器具40の保持部材49は、上面49aと、上面49aに接続された一対の側面49bと、を含んでいる。また、保持部材49の上面49aには、被駆動部材44aおよび44bを回転可能に支持する支持部491が設けられている。また、保持部材49の側面49bには、突起部492と、規制部493と、爪494とが設けられている。保持部材49は、樹脂により形成されている。
図16~図18を参照して、一実施形態によるロボットアーム21aへの手術器具40の取り付けについて説明する。
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
Claims (10)
- ロボット手術システムのロボットアームにアダプタを介して取り外し可能に接続される手術器具であって、
前記アダプタに対する取付面を有する基体と、
一方端が前記基体に接続された細長形状のシャフトと、
前記シャフトの他方端に接続された処置具と、
前記基体に回転可能に設けられ、前記処置具を操作するための細長要素の端部が接続された複数の被駆動部材と、
一方端が前記基体により保持された複数の前記被駆動部材の他方端を回転可能に保持する保持部材と、
前記保持部材および前記基体に対して移動可能に設けられ、前記アダプタに係合する可動部材と、を備え、
前記可動部材は、前記保持部材および前記基体に対して移動することにより、前記アダプタとの係合が解除されるように構成されており、
前記可動部材を前記基体の外周部方向に向けて付勢する第1付勢部材をさらに備え、
前記第1付勢部材は、前記保持部材により保持されている、手術器具。 - 少なくとも前記可動部材により、前記アダプタに設けられたガイドレールをスライドにより受け入れるための案内溝が形成され、
前記案内溝は、前記可動部材を移動させることにより、溝幅を変更可能に構成されている、請求項1に記載の手術器具。 - 前記保持部材は、前記可動部材側に突出する突起部を含み、
前記第1付勢部材は、圧縮コイルばねを含み、
前記突起部には、前記圧縮コイルばねが挿入されている、請求項1または2に記載の手術器具。 - ロボット手術システムのロボットアームにアダプタを介して取り外し可能に接続される手術器具であって、
前記アダプタに対する取付面を有する基体と、
一方端が前記基体に接続された細長形状のシャフトと、
前記シャフトの他方端に接続された処置具と、
前記基体に回転可能に設けられ、前記処置具を操作するための細長要素の端部が接続された複数の被駆動部材と、
一方端が前記基体により保持された複数の前記被駆動部材の他方端を回転可能に保持する保持部材と、
前記保持部材および前記基体に対して移動可能に設けられ、前記アダプタに係合する可動部材と、を備え、
前記可動部材は、前記保持部材および前記基体に対して移動することにより、前記アダプタとの係合が解除されるように構成されており、
前記保持部材は、前記基体に対して係合するとともに、前記被駆動部材の端部を留め具により保持することにより、前記基体に固定されている、手術器具。 - 前記保持部材は、前記留め具としての止め輪が前記被駆動部材の軸の外周に設けられた溝に嵌りこんで前記被駆動部材の端部を保持することにより、前記基体に固定されている、請求項4に記載の手術器具。
- ロボット手術システムのロボットアームにアダプタを介して取り外し可能に接続される手術器具であって、
前記アダプタに対する取付面を有する基体と、
一方端が前記基体に接続された細長形状のシャフトと、
前記シャフトの他方端に接続された処置具と、
前記基体に回転可能に設けられ、前記処置具を操作するための細長要素の端部が接続された複数の被駆動部材と、
一方端が前記基体により保持された複数の前記被駆動部材の他方端を回転可能に保持する保持部材と、
前記保持部材および前記基体に対して移動可能に設けられ、前記アダプタに係合する可動部材と、を備え、
前記可動部材は、前記保持部材および前記基体に対して移動することにより、前記アダプタとの係合が解除されるように構成されており、
前記可動部材は、押圧操作される押圧部と、前記アダプタに係合する係合部とを含み、
前記基体には、外部から前記係合部に通じる開口部が設けられている、手術器具。 - 前記可動部材の前記係合部は、前記アダプタに設けられた爪部に係合する係合穴を含む、請求項6に記載の手術器具。
- ロボット手術システムのロボットアームにアダプタを介して取り外し可能に接続される手術器具であって、
前記アダプタに対する取付面を有する基体と、
一方端が前記基体に接続された細長形状のシャフトと、
前記シャフトの他方端に接続された処置具と、
前記基体に回転可能に設けられ、前記処置具を操作するための細長要素の端部が接続された複数の被駆動部材と、
一方端が前記基体により保持された複数の前記被駆動部材の他方端を回転可能に保持する保持部材と、
前記保持部材および前記基体に対して移動可能に設けられ、前記アダプタに係合する可動部材と、を備え、
前記可動部材は、前記保持部材および前記基体に対して移動することにより、前記アダプタとの係合が解除されるように構成されており、
前記アダプタは、第1部材と、第2付勢部材を介して前記第1部材に対して移動可能に設けられた第2部材とを有し、前記被駆動部材に係合するように設けられた駆動伝達部材を含み、
前記可動部材は、前記アダプタとの係合が解除されるように移動されることにより、前記駆動伝達部材の前記第1部材を前記被駆動部材と遠ざかる方向に移動させて、前記駆動伝達部材と前記被駆動部材との係合を解除する押下げ部を含む、手術器具。 - 前記可動部材は、前記シャフトの延びる方向に対して略直交する方向に沿って一対設けられている、請求項1~8のいずれか1項に記載の手術器具。
- 前記ロボットアームにドレープを介して取り付けられた前記アダプタに取り付けられる、請求項1~9のいずれか1項に記載の手術器具。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019177054A JP7046880B2 (ja) | 2019-09-27 | 2019-09-27 | 手術器具 |
| EP20196266.9A EP3797726B1 (en) | 2019-09-27 | 2020-09-15 | Surgical instrument, assembly including adaptor and surgical instrument, and robotic surgical system |
| US17/023,428 US11642187B2 (en) | 2019-09-27 | 2020-09-17 | Surgical instrument, assembly including adaptor and surgical instrument, and robotic surgical system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019177054A JP7046880B2 (ja) | 2019-09-27 | 2019-09-27 | 手術器具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021052906A JP2021052906A (ja) | 2021-04-08 |
| JP7046880B2 true JP7046880B2 (ja) | 2022-04-04 |
Family
ID=72521427
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019177054A Active JP7046880B2 (ja) | 2019-09-27 | 2019-09-27 | 手術器具 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11642187B2 (ja) |
| EP (1) | EP3797726B1 (ja) |
| JP (1) | JP7046880B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114269280B (zh) * | 2019-08-28 | 2026-01-27 | 柯惠Lp公司 | 用于机器人手术组合件的无菌接口模块 |
| WO2023284506A1 (zh) * | 2021-07-14 | 2023-01-19 | 深圳康诺思腾科技有限公司 | 连接结构以及手术机器人 |
| US20230049257A1 (en) * | 2021-08-12 | 2023-02-16 | Cmr Surgical Limited | Surgical robot arm and instrument detachment |
| US20250235088A1 (en) * | 2024-01-24 | 2025-07-24 | Verb Surgical Inc. | Tool drive adaptor for robotic surgical instrument |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009045428A (ja) | 2007-07-25 | 2009-03-05 | Terumo Corp | 操作機構、医療用マニピュレータ及び手術用ロボットシステム |
| JP2017512525A (ja) | 2014-03-17 | 2017-05-25 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8206406B2 (en) | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US9002518B2 (en) * | 2003-06-30 | 2015-04-07 | Intuitive Surgical Operations, Inc. | Maximum torque driving of robotic surgical tools in robotic surgical systems |
| US10780573B2 (en) * | 2015-04-27 | 2020-09-22 | Intuitive Surgical Operations, Inc. | Surgical instrument housing, and related systems, and methods |
| CN109152609B (zh) * | 2016-05-26 | 2021-10-22 | 柯惠Lp公司 | 机器人手术组合件 |
| US11696759B2 (en) * | 2017-06-28 | 2023-07-11 | Cilag Gmbh International | Surgical stapling instruments comprising shortened staple cartridge noses |
| JP6772226B2 (ja) * | 2018-08-28 | 2020-10-21 | 株式会社メディカロイド | 手術器具 |
-
2019
- 2019-09-27 JP JP2019177054A patent/JP7046880B2/ja active Active
-
2020
- 2020-09-15 EP EP20196266.9A patent/EP3797726B1/en active Active
- 2020-09-17 US US17/023,428 patent/US11642187B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009045428A (ja) | 2007-07-25 | 2009-03-05 | Terumo Corp | 操作機構、医療用マニピュレータ及び手術用ロボットシステム |
| JP2017512525A (ja) | 2014-03-17 | 2017-05-25 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 手術器具と遠隔操作アクチュエータとの間の無菌障壁 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11642187B2 (en) | 2023-05-09 |
| EP3797726B1 (en) | 2025-01-15 |
| US20210093403A1 (en) | 2021-04-01 |
| EP3797726A1 (en) | 2021-03-31 |
| JP2021052906A (ja) | 2021-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6772226B2 (ja) | 手術器具 | |
| US11583352B2 (en) | Endoscope adaptor, surgical system including the same, and method of attaching endoscope to robot arm through the same | |
| EP3616642B1 (en) | Adaptor and method of attaching surgical instrument to robot arm through adaptor | |
| JP7096935B2 (ja) | 滅菌ドレープおよび手術器具の取付方法 | |
| JP6971284B2 (ja) | アダプタセットおよびアダプタ | |
| JP7035229B2 (ja) | アダプタ | |
| JP6745306B2 (ja) | アダプタおよび接続方法 | |
| JP7046880B2 (ja) | 手術器具 | |
| EP3714829A1 (en) | Adaptor | |
| US11266386B2 (en) | Adapter, robotic surgical system, and adapter attaching method | |
| US12082891B2 (en) | Robotic surgical apparatus, surgical instrument, and method of attaching surgical instrument to robot arm | |
| US20220117691A1 (en) | Adaptor, method of detaching adaptor from robot arm, and robotic surgical system | |
| EP3811883A1 (en) | Surgical instrument |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201021 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201021 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210907 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211101 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220323 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7046880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |