JP7300915B2 - 測量装置 - Google Patents
測量装置 Download PDFInfo
- Publication number
- JP7300915B2 JP7300915B2 JP2019130996A JP2019130996A JP7300915B2 JP 7300915 B2 JP7300915 B2 JP 7300915B2 JP 2019130996 A JP2019130996 A JP 2019130996A JP 2019130996 A JP2019130996 A JP 2019130996A JP 7300915 B2 JP7300915 B2 JP 7300915B2
- Authority
- JP
- Japan
- Prior art keywords
- point cloud
- laser
- cloud data
- unit
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/12—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices with means for image conversion or intensification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/02—Means for marking measuring points
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Astronomy & Astrophysics (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
(概要)
図1には、実施形態の概要が示されている。符号150は、検査対象物であり、例えばコンクリートの壁面である。検査対象物としては、壁、建物、トンネル内壁、橋脚、コンクリート等で補強された法面や崖や土手、路面、ダム、その他の各種の壁面や天井面が挙げられるが特に限定されない。検査対象物の材質は特に限定されないが、コンクリート、モルタル、金属、木材、樹脂、各種のセラミック材料、これらの複合材料が挙げられる。検査対象物は塗装されていてもよい。また、土や岩等を検査の対象とすることもできる。例えば、落石や崩落につながる地盤の動き(変形)や石の動きをレーザースキャンによって監視することも可能である。
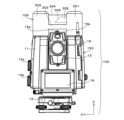
図2には、発明を利用したレーザースキャナ付きTS(トータルステーション)100の斜視図が示されている。図3には、TS100の正面図が示されている。TS100は、後述するレーザースキャナ109とTSを複合化した構造を有している。TSの機能は、通常のTSと同じである。TSの詳細な構造については、例えば特開2009-229192号公報、特開2012―202821号公報に記載されている。
図4には、TS(トータルステーション)100のブロック図が示されている。TS100のトータルステーションとしての基本的な機能は、従来のものと同じである。TS100が従来のトータルステーションと異なるのは、レーザースキャナ109と複合化されている点、レーザースキャンによって変状部分を検出できる点、更にマーキング用のレーザー光を照射できる点である。
図5は、TS100を用いて行なわれる検査対象物の変状部分の検出に係る処理の手順の一例を示すフローチャートである。図5の処理を実行するプログラムは、記憶部122や適当な記憶媒体に記憶される。この処理の手順は、動作制御部121により制御されて実行される。このプログラムを適当な記憶媒体や通信回線を介してアクセス可能な記憶装置(データサーバ等)に記憶させ、そこからダウンロードする形態も可能である。また、図5の処理をPC(パーソナルコンピュータ)やサーバ等で行う形態も可能である。
比較する点群データの取得時期の組み合わせは任意である。例えば、半年ごとにレーザースキャンを行うとする。その場合に、1年前と現在の点群データ(レーザースキャンにより得た点群データ)を比較する、2年前と現在の点群データを比較する、といった処理が可能である。
レーザースキャンの間隔に比較して、変状の進行が緩やかである場合が有り得る。この場合、N-1回目とN回目のレーザースキャンデータの比較では、検出できないが、N-2回目とN回目のレーザースキャンデータの比較では、変状が検出できる可能性がある。このような場合に対応する方法として、N-1回目とN回目のレーザースキャンデータの比較、N-2回目とN回目のレーザースキャンデータの比較、N-3回目とN回目のレーザースキャンデータの比較、・・・を行い、変状の進行を検出する形態も可能である。
本実施形態では、ステップS104で検出された変状部分の再検査のためのデータを、トータルステーション100が備える本来のTSとしての測位機能を用いて取得する。以下、一例を説明する。まず、図5のステップS105において、変状が疑われる部分が検出されたとする。この場合、当該部分を中心に9点×9点や15点×15点といったマトリクス点を設定し、これらマトリクス点に対するレーザー測位部103の機能を利用した測位を行う。
変状部分の点群データの類型パターンを機械学習により予め学習しておき、取得した変状部分の点群が何れの類型パターンに相当するのか判定する態様も可能である。この場合、時間差をおいて取得された第1の点群データと第2の点群データの差分から類型パターンを判定する。
Claims (6)
- 外部標定要素の関係が既知なトータルステーションとレーザースキャナを複合化した構成を備え、
検査対象に対して時間差をおいて前記レーザースキャナによるレーザースキャンを行うことで得た第1の点群データと第2の点群データを取得する点群データ取得部と、
前記第1の点群データと前記第2の点群データの差分を算出し、前記検査対象における位置情報に変化があった部分を詳細検査対象部分として検出する検出部と、
前記詳細検査対象部分の位置を取得する位置取得部と、
前記詳細検査対象部分の位置に基づき、前記詳細検査対象部分への前記トータルステーションの視準制御を行う視準制御部と
を備える測量装置。 - 前記トータルステーションは、望遠鏡および該望遠鏡が捉えた画像を撮像する撮像手段を備え、
前記視準制御により、前記望遠鏡の前記詳細検査対象部分への視準が行なわれ、前記撮像手段により、前記詳細検査対象部分の拡大画像の撮像が行なわれる請求項1に記載の測量装置。 - 前記トータルステーションは、マーキング光の照射を行う機能を有し、
前記視準処理の後に、前記詳細検査対象部分への前記マーキング光の照射が行なわれる請求項1または2に記載の測量装置。 - 前記視準処理の後に、前記トータルステーションは、前記詳細検査対象部分の複数の点の測位を行う請求項1~3のいずれか一項に記載の測量装置。
- 前記第1の点群データと前記第2の点群データの差分に基づき、変状の類型パターンの判定が行われる請求項1~4のいずれか一項に記載の測量装置。
- 前記判定された変状の類型パターンに応じて、その後の処理が決定される請求項5に記載の測量装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019130996A JP7300915B2 (ja) | 2019-07-16 | 2019-07-16 | 測量装置 |
| US16/916,183 US11629957B2 (en) | 2019-07-16 | 2020-06-30 | Surveying apparatus |
| EP20184246.5A EP3767231B1 (en) | 2019-07-16 | 2020-07-06 | Surveying apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019130996A JP7300915B2 (ja) | 2019-07-16 | 2019-07-16 | 測量装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021015081A JP2021015081A (ja) | 2021-02-12 |
| JP7300915B2 true JP7300915B2 (ja) | 2023-06-30 |
Family
ID=71515081
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019130996A Active JP7300915B2 (ja) | 2019-07-16 | 2019-07-16 | 測量装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11629957B2 (ja) |
| EP (1) | EP3767231B1 (ja) |
| JP (1) | JP7300915B2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110547766B (zh) * | 2019-08-22 | 2023-04-28 | 苏州佳世达光电有限公司 | 口扫机的操作方法 |
| CN113491532B (zh) * | 2020-03-20 | 2024-03-22 | 苏州佳世达光电有限公司 | 口扫机系统及口扫机的操作方法 |
| CN113567963B (zh) * | 2021-06-25 | 2024-04-12 | 北京四维远见信息技术有限公司 | 一种对激光雷达测量误差进行精密检测的方法 |
| CN113567966B (zh) * | 2021-08-10 | 2024-04-02 | 中交第二公路勘察设计研究院有限公司 | 基于蒙特卡洛仿真的机载/车载激光点云精度预估方法 |
| CN113884075A (zh) * | 2021-09-10 | 2022-01-04 | 中国十七冶集团有限公司 | 一种智能化显示隧道超欠挖投影机及操作方法 |
| US12123717B2 (en) * | 2022-01-07 | 2024-10-22 | Trimble Inc. | Total station with compensation for misaligned optical aiming point |
| CN114755666B (zh) * | 2022-06-01 | 2022-09-13 | 苏州一径科技有限公司 | 点云膨胀的评估方法、装置及设备 |
| CN115289981A (zh) * | 2022-08-30 | 2022-11-04 | 武汉新朗光电科技有限公司 | 一种多点激光位移监测装置、系统以及方法 |
| WO2025069967A1 (ja) * | 2023-09-25 | 2025-04-03 | 富士フイルム株式会社 | 剥離剥落特定装置、方法及びプログラム |
| CN121889663A (zh) * | 2023-09-25 | 2026-04-17 | 富士胶片株式会社 | 剥离剥落确定装置、方法及程序 |
| CN119879830B (zh) * | 2025-03-31 | 2025-07-04 | 四川高速公路建设开发集团有限公司 | 一种桥墩形变度的检测方法 |
| CN120521526B (zh) * | 2025-07-25 | 2025-09-19 | 广西新发展交通集团有限公司 | 基于激光干涉测量的隧道围岩大变形高精度监测设备 |
| CN121089679B (zh) * | 2025-11-11 | 2026-01-30 | 中交一公局第六工程有限公司 | 冻土路基热融沉降激光扫描测量方法及系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017223540A (ja) | 2016-06-15 | 2017-12-21 | 株式会社トプコン | 測量システム |
| CN108362216A (zh) | 2018-01-26 | 2018-08-03 | 林海剑 | 一种测量数据采集与处理方法 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5124319B2 (ja) | 1972-11-11 | 1976-07-23 | ||
| EP2041515A4 (en) | 2006-07-13 | 2009-11-11 | Velodyne Acoustics Inc | HIGH DEFINITION LIDAR SYSTEM |
| JP4966616B2 (ja) * | 2006-09-19 | 2012-07-04 | 大成建設株式会社 | 形状変動監視方法および形状変動監視システム |
| JP4256890B2 (ja) | 2006-10-25 | 2009-04-22 | 地球観測株式会社 | 地盤変状監視方法 |
| JP5263804B2 (ja) | 2007-04-20 | 2013-08-14 | 株式会社トプコン | 多点測定方法及び測量装置 |
| DE102008014274B4 (de) * | 2008-02-01 | 2020-07-09 | Faro Technologies, Inc. | Verfahren und Vorrichtung zum Bestimmen einer Entfernung zu einem Objekt |
| JP5124319B2 (ja) | 2008-03-21 | 2013-01-23 | 株式会社トプコン | 測量機、測量システム、測定対象の検出方法、および測定対象の検出プログラム |
| JP5688876B2 (ja) | 2008-12-25 | 2015-03-25 | 株式会社トプコン | レーザスキャナ測定システムの較正方法 |
| WO2011146523A2 (en) | 2010-05-17 | 2011-11-24 | Velodyne Acoustics, Inc. | High definition lidar system |
| JP5725922B2 (ja) * | 2011-03-25 | 2015-05-27 | 株式会社トプコン | 測量システム及びこの測量システムに用いる測量用ポール及びこの測量システムに用いる携帯型無線送受信装置 |
| JP6030549B2 (ja) | 2011-04-13 | 2016-11-24 | 株式会社トプコン | 三次元点群位置データ処理装置、三次元点群位置データ処理システム、三次元点群位置データ処理方法およびプログラム |
| JP5963353B2 (ja) | 2012-08-09 | 2016-08-03 | 株式会社トプコン | 光学データ処理装置、光学データ処理システム、光学データ処理方法、および光学データ処理用プログラム |
| US9074878B2 (en) * | 2012-09-06 | 2015-07-07 | Faro Technologies, Inc. | Laser scanner |
| JP2014169947A (ja) * | 2013-03-05 | 2014-09-18 | Hitachi Ltd | 形状検査方法およびその装置 |
| US10132928B2 (en) | 2013-05-09 | 2018-11-20 | Quanergy Systems, Inc. | Solid state optical phased array lidar and method of using same |
| JP6237002B2 (ja) | 2013-08-29 | 2017-11-29 | 富士通株式会社 | モデル計測装置、モデル計測方法、及びプログラム |
| JP6543520B2 (ja) | 2015-07-02 | 2019-07-10 | 株式会社トプコン | 測量データ処理装置、測量データ処理方法および測量データ処理用プログラム |
| EP3433578B8 (en) | 2016-03-21 | 2021-06-16 | Velodyne Lidar USA, Inc. | Lidar based 3-d imaging with varying illumination intensity |
| EP3264034B1 (de) * | 2016-06-30 | 2020-02-26 | Leica Geosystems AG | Vermessungsgerät mit höhenmesssystem und verfahren zum messen einer höhe |
| US10546373B2 (en) * | 2016-08-03 | 2020-01-28 | Sightline Innovation Inc. | System and method for integrated laser scanning and signal processing |
| JP6786325B2 (ja) * | 2016-09-21 | 2020-11-18 | 株式会社トプコン | 測量装置および測定方法 |
| WO2018216629A1 (ja) | 2017-05-22 | 2018-11-29 | キヤノン株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| JP2019090653A (ja) | 2017-11-13 | 2019-06-13 | 株式会社トプコン | 測量装置、測量装置の校正確認方法および測量装置の校正確認用プログラム |
| JP7007167B2 (ja) * | 2017-12-05 | 2022-01-24 | 株式会社トプコン | 測量装置、測量装置の校正方法および測量装置の校正用プログラム |
| CN108974044A (zh) | 2018-08-09 | 2018-12-11 | 铁路愿景欧洲有限公司 | 铁路轨道资产勘测系统 |
| JP7313955B2 (ja) * | 2019-07-30 | 2023-07-25 | 株式会社トプコン | 測量装置、測量方法および測量用プログラム |
-
2019
- 2019-07-16 JP JP2019130996A patent/JP7300915B2/ja active Active
-
2020
- 2020-06-30 US US16/916,183 patent/US11629957B2/en active Active
- 2020-07-06 EP EP20184246.5A patent/EP3767231B1/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017223540A (ja) | 2016-06-15 | 2017-12-21 | 株式会社トプコン | 測量システム |
| CN108362216A (zh) | 2018-01-26 | 2018-08-03 | 林海剑 | 一种测量数据采集与处理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20210018318A1 (en) | 2021-01-21 |
| JP2021015081A (ja) | 2021-02-12 |
| EP3767231B1 (en) | 2024-07-17 |
| US11629957B2 (en) | 2023-04-18 |
| EP3767231A1 (en) | 2021-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7300915B2 (ja) | 測量装置 | |
| JP7313955B2 (ja) | 測量装置、測量方法および測量用プログラム | |
| US11592291B2 (en) | Method, device, and program for surveying | |
| CN103547939B (zh) | 用于具有扫描功能的装置的校准方法 | |
| CN102985787B (zh) | 具有自动高精度觇标点照准功能的大地测量装置 | |
| CN101970985B (zh) | 确定觇标相对于带有至少两台相机的测量仪的坐标 | |
| JP7378545B2 (ja) | ターゲット装置および測量方法 | |
| JP7257326B2 (ja) | 測量装置、測量システム、測量方法および測量用プログラム | |
| JP7022601B2 (ja) | 測量装置および測量方法 | |
| CN1856693A (zh) | 用于确定手持测量仪的空间位置的方法和系统 | |
| CN112444520B (zh) | 壁面的裂纹测定机及测定方法 | |
| JP2019100915A (ja) | 測量装置、測量装置の校正方法および測量装置の校正用プログラム | |
| WO2008133315A1 (ja) | 多点測定方法及び測量装置 | |
| US10591290B2 (en) | Survey system | |
| EP3353492B1 (en) | Device and method to locate a measurement point with an image capture device | |
| CN105509721B (zh) | 测量装置 | |
| JP7565822B2 (ja) | 三次元位置測定システム,測定方法,および測定プログラム | |
| JPH06186036A (ja) | 3次元位置計測装置 | |
| JP2019168406A (ja) | ターゲット装置、測量システム | |
| JP7511049B2 (ja) | 測量装置、測量方法および測量用プログラム | |
| JP2001289620A (ja) | トンネル内施工状態検知方法 | |
| JP4403546B2 (ja) | 自動測量システム | |
| JPH06186035A (ja) | 3次元位置計測装置 | |
| CN114383580B (zh) | 电子勘测仪器 | |
| JP6954830B2 (ja) | ターゲット装置、測量方法、測量装置および測量用プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220629 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230601 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7300915 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |