JP7618115B2 - 搬送装置および搬送方法 - Google Patents
搬送装置および搬送方法 Download PDFInfo
- Publication number
- JP7618115B2 JP7618115B2 JP2024562470A JP2024562470A JP7618115B2 JP 7618115 B2 JP7618115 B2 JP 7618115B2 JP 2024562470 A JP2024562470 A JP 2024562470A JP 2024562470 A JP2024562470 A JP 2024562470A JP 7618115 B2 JP7618115 B2 JP 7618115B2
- Authority
- JP
- Japan
- Prior art keywords
- center frame
- guide mechanism
- groove
- frame
- connecting fitting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/10—Storage devices mechanical with relatively movable racks to facilitate insertion or removal of articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Handcart (AREA)
Description
<構成>
図1は、実施の形態1に係る搬送装置1の構成の一例を示すブロック図である。
図3に示すように、カートは、前部フレーム16と、後部フレーム17と、センタフレーム18と、キャスタ19と、キャスタブレーキ20と、支持フレーム21と、トレイ22とを備えている。
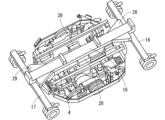
図2に示すように、搬送装置8は、ガイド機構4と、本体機構9と、キャスタ13と、駆動輪14とを備えている。本体機構9の四隅には、キャスタ13が設けられている。ガイド機構4は、本体機構9と一体に設けられており、カートのセンタフレーム18に嵌合可能なセンタフレーム用溝25を有する。
図4は、カートのセンタフレーム18と、ガイド機構4のセンタフレーム用溝25とが嵌合している状態を示す平面図である。図5は、図4のA1-A1断面図である。図6は、図4の側面図である。
以下では、建屋内において、搬送装置8は予め定められた待機位置Prestに待機しており、指示センタ15からの指示を受けると地点Paに停止しているカートを検出し、目的地Pbまでカートを搬送する動作について説明する。
実施の形態1では、カートは、センタフレーム18の延在方向とは異なる方向に張り出すようにセンタフレーム18に設けられた前連結金具23および後連結金具24を有している。また、搬送装置8のガイド機構4は、センタフレーム18に嵌合可能なセンタフレーム用溝25を有している。そして、センタフレーム用溝25にセンタフレーム18が嵌合したとき、ガイド機構4は前連結金具23と後連結金具24との間に位置する。このような構成とすることによって、搬送装置8がカートを搬送する際にセンタフレーム18に強い応力がかからないため、保持アームを強固にする必要がなく、製造コストを抑えることができる。
実施の形態1では、前連結金具23および後連結金具24がガイド機構4の前後方向を支えるように位置する場合について説明したが、これに限るものではない。前連結金具23および後連結金具24は、カートが搬送されるときに搬送装置8を支えるような構成であればよく、例えば本体機構9の一部を支えるような構成であってもよい。
搬送装置8がカートを搬送する際に平坦な床面を移動する場合において、ガイド機構4はセンタフレーム18、前連結金具23、および後連結金具24と強固に嵌合する構造であってもよい。しかし、搬送装置8がカートを搬送する際にスロープが存在する床面を移動する場合は、図12に示すように、ガイド機構4のセンタフレーム用溝25とセンタフレーム18との仰角αを予め設計した範囲内に許容する必要がある。仰角αは、例えば勾配が-5%よりも大きく+5%よりも小さい範囲内に許容される。このように、センタフレーム18にセンタフレーム用溝25が嵌合したとき、センタフレーム18とセンタフレーム用溝25との間には予め定められた間隙が存在することになる。
実施の形態1では、搬送装置8がカートの各部位の正確な位置を検出して、センタフレーム18とガイド機構4のセンタフレーム用溝25とが平面視で合うように搬送装置8を移動させた後に、センタフレーム用溝25とセンタフレーム18とを嵌合させる場合について説明した。
実施の形態2では、センタフレーム用溝25の前後方向の端部に一対の第1誘導機構26を設けている。これにより、ガイド機構4が上昇する前におけるセンタフレーム用溝25とセンタフレーム18との許容位置誤差が大きくなるため、高性能なセンサを用いることなくセンタフレーム18とセンタフレーム用溝25とを嵌合させることができる。すなわち、実施の形態1よりも安価な搬送装置を実現することができる。
センタフレーム18と第1誘導機構26との接触によってセンタフレーム18が摩耗しないようにするために、第1誘導機構26はセンタフレーム18よりも硬度が低い材質としてもよい。これにより、第1誘導機構26は摩耗しても交換することが可能となる。
第1誘導機構26の斜面は、直線状に限らず、図20に示すように下方に向かって徐々に水平に対する角度が小さくなる弧状であってもよい。このような形状とすることによって、ガイド機構4が上昇して第1誘導機構26とセンタフレーム18とが接触したときに、センタフレーム18を滑らかにセンタフレーム用溝25へと誘導することができる。
実施の形態2では、第1誘導機構26をセンタフレーム用溝25の内壁に設ける場合について説明したが、これに限るものではない。
センタフレーム18の幅が異なる複数種類のカートに対応するために、幅が異なる複数の第1誘導機構26を用意してもよい。これらの第1誘導機構26は、取り外し可能である。このような構成とすることによって、センタフレーム18に応じた適切な第1誘導機構26を選択することができる。
実施の形態2では、センタフレーム用溝25に対するセンタフレーム18の左右方向における検出の位置誤差を許容するために第1誘導機構26を設ける場合について説明した。
実施の形態3では、センタフレーム用溝25の前後方向の上部前端および上部後端のそれぞれに第2誘導機構27を設けている。これにより、ガイド機構4が上昇する前におけるガイド機構4と前連結金具23および後連結金具24との許容位置誤差が大きくなるため、高性能なセンサを用いることなく前連結金具23と後連結金具24との間にガイド機構4を位置させることができる。すなわち、実施の形態1よりも安価な搬送装置を実現することができる。
図25に示すように、第2誘導機構27は、ガイド機構4の前後方向の側部前端および側部後端のそれぞれに設けてもよい。
図26に示すように、第2誘導機構27は、前連結金具23および後連結金具24のそれぞれに設けてもよい。
実施の形態1~3では、カートが、センタフレーム18の延在方向とは異なる方向に張り出すようにセンタフレーム18に設けられた前連結金具23および後連結金具24を有する場合について説明した。
実施の形態4では、カートがくさび型構造の前連結金具28および後連結金具29を有し、ガイド機構4が前切り込み部30および後切り込み部31を有している。これにより、前連結金具28と前切り込み部30、および後連結金具29と後切り込み部31のそれぞれが強固に嵌合するため、搬送装置8がカートを旋回させる時の動力伝達の効率化と、旋回時のがたつきとを抑制することが可能となる。また、前連結金具28および後連結金具29は、前部フレーム16および後部フレーム17のそれぞれを支えとするため、センタフレーム18に対する固定および位置決めが容易となる。
実施の形態4では、センタフレーム用溝25に第1誘導機構26を設ける場合について説明したが(例えば図28,31参照)、これに限るものではない。図32に示すように、ガイド機構4の前切り込み部30および後切り込み部31のそれぞれに兼用誘導機構32を設けるようにしてもよい。前切り込み部30には2つの兼用誘導機構32が設けられ、後切り込み部31には2つの兼用誘導機構32が設けられている。
図33,34に示すように、前連結金具28は、ガイド機構4の前切り込み部30(例えば図31参照)と接触する部分に兼用誘導機構32を設けてもよい。また、後連結金具29は、ガイド機構4の後切り込み部31(例えば図31参照)と接触する部分に兼用誘導機構32を設けてもよい。図33,34に示す兼用誘導機構32の機能は、変形例1で説明した図32に示す兼用誘導機構32の機能と同様である。
図2に示す搬送装置8における制御部7および通信部12の各機能は、処理回路により実現される。すなわち、搬送装置8は、センサ群6の検出結果に基づいて、センタフレーム用溝25にセンタフレーム18が嵌合するように装置駆動部3およびガイド機構駆動部5を制御し、搬送装置8の外部に設けられた指示センタ15と通信を行うための処理回路を備える。処理回路は、専用のハードウェアであってもよく、メモリに格納されるプログラムを実行するプロセッサ(CPU、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、DSP(Digital Signal Processor)ともいう)であってもよい。
Claims (9)
- 前部フレームと、前記前部フレームに対向する後部フレームと、前記前部フレームと前記後部フレームとを結合するセンタフレームと、前記センタフレームの延在方向とは異なる方向に張り出すように前記センタフレームに設けられた前連結金具および後連結金具と、複数のキャスタとを有するカートを搬送する搬送装置であって、
前記搬送装置の全体を支持する本体機構と、
前記本体機構に設けられ、前記搬送装置を駆動する装置駆動部と、
前記センタフレームに嵌合可能なセンタフレーム用溝を有するガイド機構と、
前記ガイド機構を高さ方向に駆動するガイド機構駆動部と、
前記搬送装置の周辺状況を検出するセンサ群と、
前記装置駆動部および前記ガイド機構駆動部を制御する制御部と、
を備え、
前記制御部は、前記センサ群の検出結果に基づいて、前記センタフレーム用溝に前記センタフレームが嵌合するように前記装置駆動部および前記ガイド機構駆動部を制御し、
前記センタフレーム用溝に前記センタフレームが嵌合したとき、前記ガイド機構は前記前連結金具と前記後連結金具との間に位置し、
前記センタフレームに前記センタフレーム用溝が嵌合したとき、前記センタフレームと前記センタフレーム用溝との間には予め定められた間隙が存在し、
前記カートを搬送する際、前記前連結金具および前記後連結金具の少なくとも一方は前記ガイド機構に接する、搬送装置。 - 前記前連結金具は、前記前部フレーム側の一端よりも前記後部フレーム側の他端の方が平面視における幅が狭く、かつ当該他端が前記センタフレームと平面視において重畳するくさび型構造であり、
前記後連結金具は、前記後部フレーム側の一端よりも前記前部フレーム側の他端の方が平面視における幅が狭く、かつ当該他端が前記センタフレームと平面視において重畳するくさび型構造であり、
前記ガイド機構は、前記前連結金具の前記他端と、前記後連結金具の前記他端とのそれぞれに嵌合する切り込み部を有する、請求項1に記載の搬送装置。 - 前記ガイド機構は、前記センタフレーム用溝に前記センタフレームが嵌合するときに、前記センタフレーム用溝に前記センタフレームを誘導する第1誘導機構を有する、請求項1に記載の搬送装置。
- 前記第1誘導機構は、前記センタフレーム用溝の対向する面に設けられた傾斜を有する一対の機構、または、前記センタフレーム用溝の外であり前記センタフレーム用溝に沿って設けられた傾斜を有する一対の機構である、請求項3に記載の搬送装置。
- 前記ガイド機構は、前記センタフレーム用溝に前記センタフレームが嵌合するときに、前記ガイド機構が前記前連結金具と前記後連結金具との間に位置するように前記前連結金具および前記後連結金具を誘導する第2誘導機構を有する、請求項1に記載の搬送装置。
- 前記前連結金具および前記後連結金具のそれぞれは、前記センタフレーム用溝に前記センタフレームが嵌合するときに、前記ガイド機構が前記前連結金具と前記後連結金具との間に位置するように前記前連結金具および前記後連結金具を誘導する第2誘導機構を有する、請求項1に記載の搬送装置。
- 前記ガイド機構は、前記切り込み部に兼用誘導機構を有し、
前記兼用誘導機構は、前記センタフレーム用溝に前記センタフレームが嵌合するときに、前記センタフレーム用溝に前記センタフレームを誘導するとともに、前記切り込み部に前記前連結金具および前記後連結金具のそれぞれを誘導する、請求項2に記載の搬送装置。 - 前記前連結金具および前記後連結金具のそれぞれは、前記センタフレーム用溝に前記センタフレームが嵌合するときに、前記センタフレーム用溝に前記センタフレームを誘導するとともに、前記切り込み部に前記前連結金具および前記後連結金具のそれぞれを誘導する兼用誘導機構を有する、請求項2に記載の搬送装置。
- 前部フレームと、前記前部フレームに対向する後部フレームと、前記前部フレームと前記後部フレームとを結合するセンタフレームと、前記センタフレームの延在方向とは異なる方向に張り出すように前記センタフレームに設けられた前連結金具および後連結金具と、複数のキャスタとを有するカートを搬送装置によって搬送する搬送方法であって、
前記搬送装置が備えるセンサ群の検出結果に基づいて、前記搬送装置が備えるガイド機構が有するセンタフレーム用溝に前記センタフレームが嵌合され、
前記センタフレーム用溝に前記センタフレームが嵌合したとき、前記ガイド機構は前記前連結金具と前記後連結金具との間に位置し、
前記センタフレームに前記センタフレーム用溝が嵌合したとき、前記センタフレームと前記センタフレーム用溝との間には予め定められた間隙が存在し、
前記カートを搬送する際、前記前連結金具および前記後連結金具の少なくとも一方は前記ガイド機構に接する、搬送方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/045079 WO2024121968A1 (ja) | 2022-12-07 | 2022-12-07 | 搬送装置および搬送方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2024121968A1 JPWO2024121968A1 (ja) | 2024-06-13 |
| JPWO2024121968A5 JPWO2024121968A5 (ja) | 2025-01-17 |
| JP7618115B2 true JP7618115B2 (ja) | 2025-01-20 |
Family
ID=91378956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024562470A Active JP7618115B2 (ja) | 2022-12-07 | 2022-12-07 | 搬送装置および搬送方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7618115B2 (ja) |
| WO (1) | WO2024121968A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005105620A1 (ja) | 2004-04-30 | 2005-11-10 | Yuyama Mfg. Co., Ltd. | カート搬送装置 |
| US9073736B1 (en) | 2013-09-25 | 2015-07-07 | Amazon Technologies, Inc. | Enhanced inventory holder |
| CN108382779A (zh) | 2018-04-28 | 2018-08-10 | 上海托华机器人有限公司 | 一种智能仓储分拣系统及货架、agv |
| JP2018151328A (ja) | 2017-03-14 | 2018-09-27 | 株式会社日立製作所 | 経路決定装置、経路決定方法及び経路決定プログラム |
| JP2019162954A (ja) | 2018-03-20 | 2019-09-26 | 株式会社イシダ | 無人搬送車 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0225764Y2 (ja) * | 1985-07-29 | 1990-07-16 | ||
| JPH0427388Y2 (ja) * | 1987-03-20 | 1992-07-01 | ||
| JP6685867B2 (ja) * | 2016-08-31 | 2020-04-22 | 株式会社日立製作所 | 多段棚搬送システム及び多段棚搬送方法 |
-
2022
- 2022-12-07 JP JP2024562470A patent/JP7618115B2/ja active Active
- 2022-12-07 WO PCT/JP2022/045079 patent/WO2024121968A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005105620A1 (ja) | 2004-04-30 | 2005-11-10 | Yuyama Mfg. Co., Ltd. | カート搬送装置 |
| US9073736B1 (en) | 2013-09-25 | 2015-07-07 | Amazon Technologies, Inc. | Enhanced inventory holder |
| JP2018151328A (ja) | 2017-03-14 | 2018-09-27 | 株式会社日立製作所 | 経路決定装置、経路決定方法及び経路決定プログラム |
| JP2019162954A (ja) | 2018-03-20 | 2019-09-26 | 株式会社イシダ | 無人搬送車 |
| CN108382779A (zh) | 2018-04-28 | 2018-08-10 | 上海托华机器人有限公司 | 一种智能仓储分拣系统及货架、agv |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024121968A1 (ja) | 2024-06-13 |
| WO2024121968A1 (ja) | 2024-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10486901B2 (en) | Method and system for transporting inventory items | |
| JP7459819B2 (ja) | 搬送システム及び搬送方法 | |
| US8280547B2 (en) | Method and system for transporting inventory items | |
| JP2011518740A (ja) | リフト車両用フローティングフォーク | |
| CN109110361B (zh) | 物品输送设备以及物品输送车 | |
| JP2019156289A (ja) | 搬送装置 | |
| JP7618115B2 (ja) | 搬送装置および搬送方法 | |
| TW201435531A (zh) | 搬運系統 | |
| US11643272B2 (en) | Article transport vehicle | |
| JP7612104B2 (ja) | 搬送装置および搬送方法 | |
| JP2012150588A (ja) | 有軌道台車システム | |
| JP5372422B2 (ja) | 搬送台車用ワーク移載装置 | |
| JP2021046287A (ja) | 走行車システム | |
| JP7724967B2 (ja) | 搬送装置および搬送方法 | |
| JP3894753B2 (ja) | 無人搬送システム | |
| JP7839073B2 (ja) | 搬送台車 | |
| JP7113260B2 (ja) | 移動装置及び移動装置の制御方法 | |
| JP7750264B2 (ja) | 搬送システム | |
| JP2024128225A (ja) | 搬送台車 | |
| US20240427354A1 (en) | Data processing device, mobile body system, mobile body, data processing method, and storage medium | |
| JP2003081410A (ja) | 無人搬送システム | |
| JP2020203684A (ja) | 搬送装置およびプログラム | |
| JP7768183B2 (ja) | 搬送システム | |
| JP7782788B2 (ja) | 自律走行装置および自律走行装置の制御方法 | |
| JP7750261B2 (ja) | 搬送システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20241111 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20241111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250107 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7618115 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |