JP7643277B2 - 車両制御インターフェース、自動運転システムおよびそれを備える車両、ならびに、車両の制御方法 - Google Patents
車両制御インターフェース、自動運転システムおよびそれを備える車両、ならびに、車両の制御方法 Download PDFInfo
- Publication number
- JP7643277B2 JP7643277B2 JP2021157686A JP2021157686A JP7643277B2 JP 7643277 B2 JP7643277 B2 JP 7643277B2 JP 2021157686 A JP2021157686 A JP 2021157686A JP 2021157686 A JP2021157686 A JP 2021157686A JP 7643277 B2 JP7643277 B2 JP 7643277B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- mode
- vehicle platform
- control interface
- platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/46—Interconnection of networks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/035—Bringing the control units into a predefined state, e.g. giving priority to particular actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0061—Aborting handover process
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0055—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements
- G05D1/0061—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements for transition from automatic pilot to manual pilot and vice versa
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- H04L12/40039—Details regarding the setting of the power status of a node according to activity on the bus
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
図1は、本開示の実施の形態に係る車両の概要を示す図である。車両1は、自動運転キット(ADK:Autonomous Driving Kit)10と、車両プラットフォーム(VP:Vehicle Platform)20とを備える。ADK10は、VP20に取り付け可能(車両1に搭載可能)に構成されている。ADK10とVP20とは、車両制御インターフェース(後述するVCIB40)を介して相互に通信可能に構成されている。
図2は、ADS11、VCIB40およびVP20の構成をより詳細に示す図である。図2に示すように、ADS11は、コンピュータ111と、HMI(Human Machine Interface)112と、認識用センサ113と、姿勢用センサ114と、センサクリーナ115とを含む。
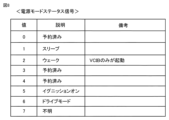
図3は、車両1のモード遷移を示すステートマシンである。この例において、車両1は、スリープモードと、2つのマニュアルモードと、1つの自動モードと、メンテナンスモードとを有する。2つのマニュアルモードとは、通常マニュアルモード、および、有人マニュアルモードである。1つの自動モードとは有人自動モードである。
スリープモードとは、VCIB40を含むほどんどのシステムが停止しているモードである。起動直後のVP20(VCIB40を含む)はスリープモードである。スリープモードにおいては、ADS11は、どのような制御指令もVP20に対して出力できない。ADS11に対するVCIB40によるデバイス認証も行われていない。
通常マニュアルモードとは、通常の車両(自動運転に非対応の車両)と同様のモード、すなわち、VP20がオペレータ(運転手、乗客など)の制御下にあるモードである。通常マニュアルモードでは、オペレータが車室内(VP20内)にいる場合もあるし、オペレータが車室にはいない場合もある。通常マニュアルモードは、本開示に係る「第1のマニュアルモード」に相当する。
有人マニュアルモードとは、オペレータが車室内にいる状態でのマニュアルモードである。有人マニュアルモードでは、VCIB40が認証され、VCIB40がVP20(統合制御マネージャ31)と通信可能である。しかし、VP20は、ADS11ではなくオペレータの制御下にある。有人マニュアルモードは、本開示に係る「第2のマニュアルモード」に相当する。
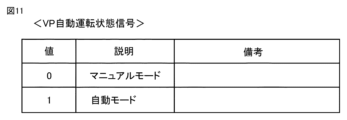
有人自動モードとは、VP20がADS11の制御下にあり、車両1の自動運転が可能なモードである。有人自動モードは、本開示に係る「自動モード」に相当する。
メンテナンスモードとは、車両1の整備のためのモードである。メンテナンスモードにおいては、車両1の移動を防ぐため、P-Lockシステム342によって車輪が固定される。また、統合制御マネージャ31は、たとえオペレータがスタートボタン(図示せず)を押下してもパワーオン要求を拒絶する。車両1がハイブリッド車両等である場合にエンジン始動(それに伴う屋内での排気ガスの発生)を防ぐためである。
スリープモードにおいて、スマートキーなどの物理キー(図示せず)が車室内に存在する状態でオペレータがスタートボタンを押下した場合に、車両1は、スリープモードから通常マニュアルモードに遷移する。
通常マニュアルモードにおいて、物理キーが車室内に存在する状態でオペレータがスタートボタンを押下した場合に、車両1は、通常マニュアルモードからスリープモードに遷移する。
通常マニュアルモードにおいて、(1)VP20(統合制御マネージャ31)によりVCIB40が認証され、かつ、(2)車室内にオペレータが存在する場合に、車両1は、通常マニュアルモードから有人マニュアルモードに遷移する。
有人マニュアルモードにおいて、(1)VP20が車両電源オフ状態(ReadyOFF)に移行する場合、または、(2)物理キーが車室内に存在する状態でオペレータがスタートボタンを押下した場合に、車両1は、有人マニュアルモードからスリープモードに遷移する。
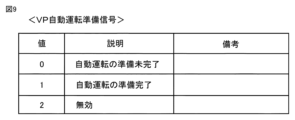
有人マニュアルモードにおいて、(1)VP20の自動運転の準備ができており、かつ、(2)ADS11からVCIB40に自動運転が要求された場合に、車両1は、有人マニュアルモードから有人自動モードに遷移する。
有人自動モードにおいて、ADS11からVCIB40を介して統合制御マネージャ31にマニュアルモードへの遷移が要求された場合に、車両1は、有人自動モードから有人マニュアルモードに遷移する。より具体的には、車両1は、自動運転要求=「解除要求」である場合に、有人自動モードから有人マニュアルモードに遷移する。
通常マニュアルモードにおいて、(1)VP20によりVCIB40が認証され、かつ、(2)VP20がイグニッションオンされており、かつ、(3)シフトレンジがPレンジであり、かつ、(4)車両1が停車しており、かつ、(5)ADS11からのメンテナンス要求ありの場合に、車両1は、通常マニュアルモードからメンテナンスモードに遷移する。
メンテナンスモードにおいて、(1)VP20がイグニッションオンされており、かつ、(2)シフトレンジがPレンジであり、かつ、(3)車両1が停車しており、かつ、(4)ADS11からのメンテナンス要求なしの場合に、車両1は、メンテナンスモードから通常マニュアルモードに遷移する。より具体的には、車両1は、駆動方向ステータス信号=「Pレンジ」であり、かつ、実移動方向信号=「停車」であり、かつ、メンテナンス要求=「要求なし」である場合に、メンテナンスモードから通常マニュアルモードに遷移する。














































































Claims (16)
- 車両プラットフォームに搭載可能な自動運転システムと、前記車両プラットフォームとの間のインターフェースを行う車両制御インターフェースであって、
前記車両プラットフォームは、統合制御マネージャ、ブレーキシステム、ステアリングシステムおよびパワートレーンシステムが搭載されたベース車両を含み、
前記車両プラットフォームは、
前記車両プラットフォームが起動された場合に設定され、オペレータが前記車両プラットフォーム内にいることを要求されない第1のマニュアルモードと、
前記オペレータが前記車両プラットフォーム内にいることを要求され、前記車両プラットフォームが前記オペレータの制御下にある第2のマニュアルモードと、
前記車両プラットフォームが前記自動運転システムの制御下にある自動モードとを有し、
前記車両制御インターフェースは、
プロセッサと、
前記プロセッサによって実行可能なプログラムを記憶するメモリとを備え、
前記プロセッサは、
前記オペレータが前記車両プラットフォーム内にいるかどうかを表し、かつ、前記車両プラットフォームを前記第1のマニュアルモードから前記第2のマニュアルモードに遷移させるためのオペレータ指令を前記自動運転システムから受け、
前記車両プラットフォームの自動運転の準備ができていることを示す自動運転準備信号を前記自動運転システムに出力するとともに、前記車両プラットフォームを前記第2のマニュアルモードから前記自動モードに遷移させるための自動運転要求を前記自動運転システムから受ける、車両制御インターフェース。 - 前記自動運転要求は、前記自動モードの設定を要求するかと、前記自動モードの解除を要求するかとを切替可能であり、
前記プロセッサは、前記自動モードにおいて、前記自動モードの解除を要求する前記自動運転要求を前記自動運転システムから受ける、請求項1に記載の車両制御インターフェース。 - 前記車両プラットフォームは、前記車両制御インターフェースが停止するスリープモードをさらに有し、
前記プロセッサは、前記第2のマニュアルモードにおいて、前記車両プラットフォームを前記第2のマニュアルモードから前記スリープモードに遷移させるための電源モード要求を前記自動運転システムから受ける、請求項1または2に記載の車両制御インターフェース。 - 前記車両プラットフォームは、前記車両プラットフォームを整備するためのメンテナンスモードをさらに有し、
前記プロセッサは、前記第1のマニュアルモードから前記メンテナンスモードへの遷移において、
前記車両プラットフォームがイグニッションオンされていることを示す電源モードステータス信号を前記自動運転システムに出力し、
シフトレンジがPレンジであることを示す駆動方向ステータス信号を前記自動運転システムに出力し、
前記車両プラットフォームが停車していることを示す実移動方向信号を前記自動運転システムに出力し、
前記車両プラットフォームの整備を要求する旨のメンテナンス要求を前記自動運転システムから受ける、請求項1~3のいずれか1項に記載の車両制御インターフェース。 - 前記メンテナンス要求は、前記車両プラットフォームの整備を要求するかと、前記車両プラットフォームの整備を要求しないかとを切替可能であり、
前記プロセッサは、前記メンテナンスモードから前記第1のマニュアルモードへの遷移において、
前記車両プラットフォームがイグニッションオンされていることを示す前記電源モードステータス信号を前記自動運転システムに出力し、
前記シフトレンジがPレンジであることを示す前記駆動方向ステータス信号を前記自動運転システムに出力し、
前記車両プラットフォームが停車していることを示す前記実移動方向信号を前記自動運転システムに出力し、
前記車両プラットフォームの整備を要求しない旨の前記メンテナンス要求を前記自動運転システムから受ける、請求項4に記載の車両制御インターフェース。 - 車両に含まれる車両プラットフォームに搭載可能な自動運転システムであって、
前記車両プラットフォームは、統合制御マネージャ、ブレーキシステム、ステアリングシステムおよびパワートレーンシステムが搭載されたベース車両を含み、
前記車両プラットフォームは、前記自動運転システムと前記車両プラットフォームとの間のインターフェースを行う車両制御インターフェースを有し、
前記車両プラットフォームは、
前記車両プラットフォームが起動された場合に設定され、オペレータが前記車両プラットフォーム内にいることを要求されない第1のマニュアルモードと、
前記オペレータが前記車両プラットフォーム内にいることを要求され、前記車両プラットフォームが前記オペレータの制御下にある第2のマニュアルモードと、
前記車両プラットフォームが前記自動運転システムの制御下にある自動モードとを有し、
前記自動運転システムは、
コンピュータと、
前記車両制御インターフェースと通信可能に構成された通信モジュールとを備え、
前記コンピュータは、
前記オペレータが前記車両プラットフォーム内にいるかどうかを表し、かつ、前記車両プラットフォームを前記第1のマニュアルモードから前記第2のマニュアルモードに遷移させるためのオペレータ指令を前記車両制御インターフェースに出力し、
前記車両プラットフォームの自動運転の準備ができていることを示す自動運転準備信号を前記車両制御インターフェースから受けるとともに、前記車両プラットフォームを前記第2のマニュアルモードから前記自動モードに遷移させるための自動運転要求を前記車両制御インターフェースに出力する、自動運転システム。 - 前記自動運転要求は、前記自動モードの設定を要求するかと、前記自動モードの解除を要求するかとを切替可能であり、
前記コンピュータは、前記自動モードにおいて、前記自動モードの解除を要求する前記自動運転要求を前記車両制御インターフェースに出力する、請求項6に記載の自動運転システム。 - 前記車両プラットフォームは、前記車両制御インターフェースが停止するスリープモードをさらに有し、
前記コンピュータは、前記第2のマニュアルモードにおいて、前記車両プラットフォームを前記第2のマニュアルモードから前記スリープモードに遷移させるための電源モード要求を前記車両制御インターフェースに出力する、請求項7に記載の自動運転システム。 - 前記車両プラットフォームは、前記車両プラットフォームを整備するためのメンテナンスモードをさらに有し、
前記コンピュータは、前記第1のマニュアルモードから前記メンテナンスモードへの遷移において、
前記車両プラットフォームがイグニッションオンされていることを示す電源モードステータス信号を前記車両制御インターフェースから受け、
シフトレンジがPレンジであることを示す駆動方向ステータス信号を前記車両制御インターフェースから受け、
前記車両プラットフォームが停車していることを示す実移動方向信号を前記車両制御インターフェースから受け、
前記車両プラットフォームの整備を要求する旨のメンテナンス要求を前記車両制御インターフェースに出力する、請求項6~8のいずれか1項に記載の自動運転システム。 - 前記メンテナンス要求は、前記車両プラットフォームの整備を要求するかと、前記車両プラットフォームの整備を要求しないかとを切替可能であり、
前記コンピュータは、前記メンテナンスモードから前記第1のマニュアルモードへの遷移において、
前記車両プラットフォームがイグニッションオンされていることを示す前記電源モードステータス信号を前記車両制御インターフェースから受け、
前記シフトレンジがPレンジであることを示す前記駆動方向ステータス信号を前記車両制御インターフェースから受け、
前記車両プラットフォームが停車していることを示す前記実移動方向信号を前記車両制御インターフェースから受け、
前記車両プラットフォームの整備を要求しない旨の前記メンテナンス要求を前記車両制御インターフェースに出力する、請求項9に記載の自動運転システム。 - 請求項6~10のいずれか1項に記載の自動運転システムと、
車両プラットフォームとを備え、
前記車両プラットフォームは、統合制御マネージャ、ブレーキシステム、ステアリングシステムおよびパワートレーンシステムが搭載されたベース車両を含み、
前記車両プラットフォームは、前記自動運転システムと前記車両プラットフォームとの間のインターフェースを行う車両制御インターフェースを有し、
前記車両プラットフォームは、
前記車両プラットフォームが起動された場合に設定され、オペレータが前記車両プラットフォーム内にいることを要求されない第1のマニュアルモードと、
前記オペレータが前記車両プラットフォーム内にいることを要求され、前記車両プラットフォームが前記オペレータの制御下にある第2のマニュアルモードと、
前記車両プラットフォームが前記自動運転システムの制御下にある自動モードとを有する、車両。 - 自動運転システムを搭載可能な車両プラットフォームを含む車両の制御方法であって、
前記車両プラットフォームは、統合制御マネージャ、ブレーキシステム、ステアリングシステムおよびパワートレーンシステムが搭載されたベース車両を含み、
前記車両プラットフォームは、前記自動運転システムと前記車両プラットフォームとの間のインターフェースを行う車両制御インターフェースをさらに含み、
前記制御方法は、
前記車両プラットフォームが起動された場合に、オペレータが前記車両プラットフォーム内にいることを要求することなく前記車両プラットフォームを第1のマニュアルモードに設定するステップと、
前記第1のマニュアルモードにおいて、前記オペレータが前記車両プラットフォーム内にいる場合に、前記車両プラットフォームが前記第1のマニュアルモードから第2のマニュアルモードに遷移するステップと、
前記第2のマニュアルモードにおいて、前記車両プラットフォームの自動運転の準備ができており、かつ、前記自動運転システムから前記車両制御インターフェースに自動運転要求が出力された場合に、前記車両プラットフォームが前記第2のマニュアルモードから自動モードに遷移するステップとを含み、
前記第2のマニュアルモードは、前記オペレータが前記車両プラットフォーム内にいることを要求され、前記車両プラットフォームが前記オペレータの制御下にあるモードであり、
前記自動モードは、前記車両プラットフォームが前記自動運転システムの制御下にあるモードである、車両の制御方法。 - 前記自動運転要求は、前記自動モードの設定を要求するかと、前記自動モードの解除を要求するかとを切替可能であり、
前記自動運転システムから前記車両制御インターフェースに、前記自動モードの解除を要求する前記自動運転要求が出力された場合に、前記車両プラットフォームが前記自動モードから前記第2のマニュアルモードに遷移するステップをさらに含む、請求項12に記載の車両の制御方法。 - 前記車両プラットフォームは、前記車両制御インターフェースが停止するスリープモードをさらに有し、
前記制御方法は、前記自動運転システムから前記車両制御インターフェースに、前記車両プラットフォームを前記第2のマニュアルモードから前記スリープモードに遷移させるための電源モード要求が出力された場合に、前記第2のマニュアルモードから前記スリープモードに遷移するステップをさらに含む、請求項12または13に記載の車両の制御方法。 - 前記車両プラットフォームは、前記車両プラットフォームの整備のためのメンテナンスモードをさらに有し、
前記制御方法は、第1~第4の条件が成立した場合に前記車両プラットフォームが前記第1のマニュアルモードから前記メンテナンスモードに遷移するステップをさらに含み、 前記第1の条件は、前記車両制御インターフェースから前記自動運転システムに、前記車両プラットフォームがイグニッションオンされていることを示す電源モードステータス信号が出力されたとの条件であり、
前記第2の条件は、前記車両制御インターフェースから前記自動運転システムに、シフトレンジがPレンジであることを示す駆動方向ステータス信号が出力されたとの条件であり、
前記第3の条件は、前記車両制御インターフェースから前記自動運転システムに、前記車両プラットフォームが停車していることを示す実移動方向信号が出力されたとの条件であり、
前記第4の条件は、前記自動運転システムから前記車両制御インターフェースに、前記車両プラットフォームの整備を要求する旨のメンテナンス要求が出力されたとの条件である、請求項12~14のいずれか1項に記載の車両の制御方法。 - 前記メンテナンス要求は、前記車両プラットフォームの整備を要求するかと、前記車両プラットフォームの整備を要求しないかとを切替可能であり、
第5~第8の条件が成立した場合に前記車両プラットフォームが前記メンテナンスモードから前記第1のマニュアルモードに遷移するステップをさらに含み、
前記第5の条件は、前記車両制御インターフェースから前記自動運転システムに、前記車両プラットフォームがイグニッションオンされていることを示す前記電源モードステータス信号が出力されたとの条件であり、
前記第6の条件は、前記車両制御インターフェースから前記自動運転システムに、シフトレンジがPレンジであることを示す前記駆動方向ステータス信号が出力されたとの条件であり、
前記第7の条件は、前記車両制御インターフェースから前記自動運転システムに、前記車両プラットフォームが停車していることを示す前記実移動方向信号が出力されたとの条件であり、
前記第8の条件は、前記自動運転システムから前記車両制御インターフェースに、前記車両プラットフォームの整備を要求しない旨の前記メンテナンス要求が出力されたとの条件である、請求項15に記載の車両の制御方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021157686A JP7643277B2 (ja) | 2021-09-28 | 2021-09-28 | 車両制御インターフェース、自動運転システムおよびそれを備える車両、ならびに、車両の制御方法 |
| US17/947,592 US12434741B2 (en) | 2021-09-28 | 2022-09-19 | Vehicle control interface and vehicle including the same, autonomous driving system and vehicle including the same, and method of controlling vehicle |
| CN202211184878.6A CN115871707A (zh) | 2021-09-28 | 2022-09-27 | 车辆控制接口及包括其的车辆、自动驾驶系统及包括其的车辆以及控制车辆的方法 |
| JP2024186524A JP7790518B2 (ja) | 2021-09-28 | 2024-10-23 | 車両 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021157686A JP7643277B2 (ja) | 2021-09-28 | 2021-09-28 | 車両制御インターフェース、自動運転システムおよびそれを備える車両、ならびに、車両の制御方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024186524A Division JP7790518B2 (ja) | 2021-09-28 | 2024-10-23 | 車両 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023048395A JP2023048395A (ja) | 2023-04-07 |
| JP7643277B2 true JP7643277B2 (ja) | 2025-03-11 |
Family
ID=85770093
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021157686A Active JP7643277B2 (ja) | 2021-09-28 | 2021-09-28 | 車両制御インターフェース、自動運転システムおよびそれを備える車両、ならびに、車両の制御方法 |
| JP2024186524A Active JP7790518B2 (ja) | 2021-09-28 | 2024-10-23 | 車両 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024186524A Active JP7790518B2 (ja) | 2021-09-28 | 2024-10-23 | 車両 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12434741B2 (ja) |
| JP (2) | JP7643277B2 (ja) |
| CN (1) | CN115871707A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025011628A (ja) * | 2023-07-11 | 2025-01-24 | トヨタ自動車株式会社 | 車両 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008120182A (ja) | 2006-11-10 | 2008-05-29 | Omron Corp | 点灯制御装置及び点灯制御方法 |
| WO2017006651A1 (ja) | 2015-07-08 | 2017-01-12 | 本田技研工業株式会社 | 自動運転制御装置 |
| JP2018060295A (ja) | 2016-10-03 | 2018-04-12 | Kddi株式会社 | 制御装置、制御方法、及びコンピュータプログラム |
| JP2020123295A (ja) | 2019-01-31 | 2020-08-13 | 株式会社小松製作所 | 無人車両の制御システム及び無人車両の制御方法 |
| JP2021123147A (ja) | 2020-01-31 | 2021-08-30 | トヨタ自動車株式会社 | 車両 |
Family Cites Families (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100536385B1 (ko) * | 2003-12-30 | 2005-12-12 | 기아자동차주식회사 | 버스 정비 작업중 시동 방지 장치 |
| US8280580B2 (en) * | 2008-02-06 | 2012-10-02 | Ford Global Technologies, Llc | System and method for controlling electronic stability control based on driver status |
| US8825258B2 (en) * | 2012-11-30 | 2014-09-02 | Google Inc. | Engaging and disengaging for autonomous driving |
| DE102013019141A1 (de) * | 2013-11-15 | 2015-05-21 | Audi Ag | Fahrmoduswechsel beim Fahrerassistenzsystem |
| US9517764B2 (en) * | 2014-10-23 | 2016-12-13 | Ford Global Technologies, Llc | Methods and system for operating a hybrid vehicle in cruise control mode |
| JP2016199104A (ja) * | 2015-04-08 | 2016-12-01 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP2017001597A (ja) * | 2015-06-15 | 2017-01-05 | トヨタ自動車株式会社 | 自動運転装置 |
| JP6451537B2 (ja) * | 2015-07-21 | 2019-01-16 | 株式会社デンソー | 運転支援制御装置 |
| KR102464926B1 (ko) * | 2016-02-11 | 2022-11-08 | 삼성전자주식회사 | 운송 기기를 제어하는 제어 장치 및 이의 운송 기기 제어 방법 |
| JP6508177B2 (ja) * | 2016-04-27 | 2019-05-08 | 株式会社デンソー | 支援システム、携帯端末、及び車載装置 |
| JP7001349B2 (ja) | 2017-02-16 | 2022-01-19 | 株式会社デンソー | 自動運転制御装置 |
| US10220857B2 (en) * | 2017-02-23 | 2019-03-05 | Uber Technologies, Inc. | Vehicle control system |
| US10304343B2 (en) * | 2017-02-24 | 2019-05-28 | At&T Mobility Ii Llc | Flight plan implementation, generation, and management for aerial devices |
| US10753763B2 (en) * | 2017-04-10 | 2020-08-25 | Chian Chiu Li | Autonomous driving under user instructions |
| JP6455569B2 (ja) * | 2017-07-31 | 2019-01-23 | トヨタ自動車株式会社 | 運転支援方法及び運転支援装置 |
| US10509418B1 (en) * | 2017-08-09 | 2019-12-17 | Rockwell Collins, Inc. | * Theta* merged 3D routing method |
| ES2774728T3 (es) * | 2017-10-11 | 2020-07-22 | Boeing Co | Un método y sistema implementados por ordenador para generar una trayectoria 3D a una ubicación de aterrizaje para un vehículo aéreo |
| US20210114628A1 (en) * | 2018-06-21 | 2021-04-22 | Daniel KHURGIN | Method of vehicle operation in a mixed mode |
| US11639142B2 (en) * | 2019-01-11 | 2023-05-02 | Ford Global Technologies, Llc | Electronic control module wake monitor |
| JP7238495B2 (ja) * | 2019-03-12 | 2023-03-14 | トヨタ自動車株式会社 | 車両運転システム |
| CN112041773B (zh) * | 2019-03-29 | 2024-06-14 | 百度时代网络技术(北京)有限公司 | 自动驾驶车辆的规划和控制之间的通信协议 |
| JP7310403B2 (ja) * | 2019-07-23 | 2023-07-19 | トヨタ自動車株式会社 | 車両制御装置及び自動運転禁止システム |
| US11391257B2 (en) * | 2019-07-23 | 2022-07-19 | Ford Global Technologies, Llc | Power supply during vehicle startup |
| CN112236348B (zh) * | 2019-09-03 | 2024-10-01 | 北京航迹科技有限公司 | 自动驾驶中的驾驶模式切换系统和方法 |
| JP7159137B2 (ja) * | 2019-09-25 | 2022-10-24 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| US12434719B2 (en) * | 2019-10-21 | 2025-10-07 | Ford Global Technologies, Llc | Enhanced vehicle activation |
| WO2021091766A1 (en) * | 2019-11-04 | 2021-05-14 | Nuro, Inc. | Methods and apparatus for activating and monitoring functions of an autonomous vehicle |
| DE102020113864A1 (de) * | 2019-12-10 | 2021-06-10 | Ford Global Technologies Llc | Kraftwagen und Verfahren zum Betreiben eines Kraftwagens |
| JP7098216B2 (ja) * | 2019-12-13 | 2022-07-11 | 本田技研工業株式会社 | 車両支援装置、自動運転可能な車両、車両支援方法及びプログラム |
| US11702110B2 (en) * | 2020-01-06 | 2023-07-18 | Nio Technology (Anhui) Co., Ltd. | Methods and systems to enhance safety of bi-directional transition between autonomous and manual driving modes |
| DE102020105793A1 (de) * | 2020-03-04 | 2021-09-09 | Volocopter Gmbh | Bahnplanungsverfahren und Bahnplanungsalgorithmus für ein Fluggerät |
| US11554791B2 (en) * | 2020-03-06 | 2023-01-17 | Caterpillar Paving Products Inc. | Test system and method for autonomous machines |
| US11513517B2 (en) * | 2020-03-30 | 2022-11-29 | Uatc, Llc | System and methods for controlling state transitions using a vehicle controller |
| EP3892512B1 (en) * | 2020-04-08 | 2025-01-22 | Zenuity AB | Methods and systems for hand-over from and ads feature to a driver of a vehicle |
| US20210331686A1 (en) * | 2020-04-22 | 2021-10-28 | Uatc, Llc | Systems and Methods for Handling Autonomous Vehicle Faults |
| JP7517312B2 (ja) * | 2021-11-25 | 2024-07-17 | トヨタ自動車株式会社 | 車両乗員の移動距離測定装置、移動距離測定プログラム、及び移動距離測定方法 |
| US20230339472A1 (en) * | 2022-04-26 | 2023-10-26 | Tusimple, Inc. | System and method for autonomous driving mode transition control based on driver detection |
| KR20240053219A (ko) * | 2022-10-17 | 2024-04-24 | 현대자동차주식회사 | 전력 제어 장치 및 그를 가지는 차량 |
-
2021
- 2021-09-28 JP JP2021157686A patent/JP7643277B2/ja active Active
-
2022
- 2022-09-19 US US17/947,592 patent/US12434741B2/en active Active
- 2022-09-27 CN CN202211184878.6A patent/CN115871707A/zh active Pending
-
2024
- 2024-10-23 JP JP2024186524A patent/JP7790518B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008120182A (ja) | 2006-11-10 | 2008-05-29 | Omron Corp | 点灯制御装置及び点灯制御方法 |
| WO2017006651A1 (ja) | 2015-07-08 | 2017-01-12 | 本田技研工業株式会社 | 自動運転制御装置 |
| JP2018060295A (ja) | 2016-10-03 | 2018-04-12 | Kddi株式会社 | 制御装置、制御方法、及びコンピュータプログラム |
| JP2020123295A (ja) | 2019-01-31 | 2020-08-13 | 株式会社小松製作所 | 無人車両の制御システム及び無人車両の制御方法 |
| JP2021123147A (ja) | 2020-01-31 | 2021-08-30 | トヨタ自動車株式会社 | 車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| US12434741B2 (en) | 2025-10-07 |
| CN115871707A (zh) | 2023-03-31 |
| JP2023048395A (ja) | 2023-04-07 |
| JP2025010177A (ja) | 2025-01-20 |
| JP7790518B2 (ja) | 2025-12-23 |
| US20230109715A1 (en) | 2023-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7626016B2 (ja) | 車両プラットフォーム、自動運転システム、および車両制御インターフェースボックス | |
| JP7771998B2 (ja) | 車両プラットフォーム、車両制御インターフェースボックス、および、自動運転システム | |
| JP7652037B2 (ja) | 自動運転システム、及び車両 | |
| US20250276719A1 (en) | Vehicle control interface, vehicle, and control method for vehicle | |
| JP7790518B2 (ja) | 車両 | |
| JP7484858B2 (ja) | 自動運転キット、車両プラットフォーム、車両インターフェースボックスおよび車両 | |
| JP7552566B2 (ja) | 車両管理システムおよび車両管理方法 | |
| JP2024060752A (ja) | 車両 | |
| JP2024065846A (ja) | 車両、車両プラットフォームおよび自動運転キット | |
| JP7615991B2 (ja) | 自動運転システム、車両制御インターフェースおよび車両 | |
| US12428038B2 (en) | Vehicle | |
| JP7794161B2 (ja) | 車両、車両の制御方法および車両制御インターフェースボックス | |
| JP7619234B2 (ja) | 車両、車両プラットフォーム、車両制御インターフェースボックス、自動運転キット、車両の制御方法、および、車両プラットフォームの制御方法 | |
| JP7746954B2 (ja) | 車両 | |
| JP7816275B2 (ja) | 車両制御装置 | |
| JP7662481B2 (ja) | 車両プラットフォーム | |
| US20240416968A1 (en) | Vehicle control device | |
| JP2025163822A (ja) | 車両 | |
| JP2023048354A (ja) | 車両、車両の制御方法および車両制御インターフェースボックス |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230526 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240508 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241022 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20241029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250128 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250210 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7643277 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |