KR20090052889A - 이미지들로부터 깊이 맵을 결정하기 위한 방법 및 깊이 맵을 결정하기 위한 디바이스 - Google Patents
이미지들로부터 깊이 맵을 결정하기 위한 방법 및 깊이 맵을 결정하기 위한 디바이스 Download PDFInfo
- Publication number
- KR20090052889A KR20090052889A KR1020097006726A KR20097006726A KR20090052889A KR 20090052889 A KR20090052889 A KR 20090052889A KR 1020097006726 A KR1020097006726 A KR 1020097006726A KR 20097006726 A KR20097006726 A KR 20097006726A KR 20090052889 A KR20090052889 A KR 20090052889A
- Authority
- KR
- South Korea
- Prior art keywords
- point
- matching
- windows
- depth map
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Geometry (AREA)
- Computer Graphics (AREA)
- Software Systems (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
Description







Claims (19)
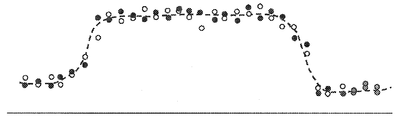
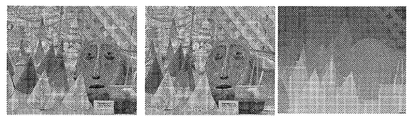
- 이미지의 포인트에 대해 윈도우-기반 매칭을 사용하여 상이한 방향들(orientations)로부터 획득된 이미지들로부터 깊이 맵을 결정하기 위한 방법으로서,적어도 상기 이미지의 부분에 대하여, 상기 이미지의 부분의 포인트들에 대하여, 매칭 윈도우들의 세트가 사용되고, 하나 이상의 후보 디스패러티 값이 각각의 포인트에 어트리뷰팅(attributing)되는 임시적인 깊이 맵을 제공하기 위해 각각의 포인트에 대해 다수의 후보 디스패러티 값들이 계산되고, 그 후에, 이웃하는 포인트들에 대한 상기 후보 디스패러티 값들로부터 상기 포인트로 포인팅하는 단위 벡터들의 합의 놈(norm)의 적어도 z-성분을 각각의 포인트에 대해 최소화함으로써 또 다른 깊이 맵이 계산되는, 깊이 맵 결정 방법.
- 제 1 항에 있어서,상기 이웃하는 포인트들의 단위 벡터들의 합의 놈의 모든 성분들이 최소화되는, 깊이 맵 결정 방법.
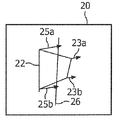
- 제 1 항에 있어서,매칭의 세트는 관심있는 포인트가 상기 매칭 윈도우에 대하여 편심적으로 위치되는 하나 이상의 매칭 윈도우들을 포함하는, 깊이 맵 결정 방법.
- 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,상기 단위 벡터들의 합은 가중된 합이고,상기 계산 내의 각각의 단위 벡터들에 대한 가중치는 상기 관심있는 포인트까지의 거리의 함수인, 깊이 맵 결정 방법.
- 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,평균으로부터의 문턱치보다 더 많이 상이한 단위 벡터들을 상기 계산으로부터 삭제하기 위해 검사가 수행되는, 깊이 맵 결정 방법.
- 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,상기 매칭 윈도우의 세트는 실질적으로 직교하는 매칭 윈도우들의 세트인, 깊이 맵 결정 방법.
- 제 6 항에 있어서,상기 매칭 윈도우들의 수는 4개이고, 상기 매칭 윈도우들은 크로스(cross)를 형성하는, 깊이 맵 결정 방법.
- 제 7 항에 있어서,상기 매칭 윈도우들의 수는 8개이고,상기 윈도우들은 2개의 포섬들로 이루어지고, 하나의 포섬은 크로스를 각각 형성하는, 다른 포섬의 상기 윈도우들의 좌측 또는 우측 버전인, 깊이 맵 결정 방법.
- 제 6 항에 있어서,상기 매칭 윈도우들은 실질적으로 삼각형인, 깊이 맵 결정 방법.
- 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,아웃라이어 거부/폐색 검출(outlier rejection/occlusion detection)이 상기 또 다른 깊이 맵 상에서 수행되는, 깊이 맵 결정 방법.
- 제 10 항에 있어서,이미지 기반 홀 충전이 상기 또 다른 깊이 맵 상에서 수행되는, 깊이 맵 결정 방법.
- 컴퓨터 프로그램이 컴퓨터 상에서 실행될 때, 제 1 항 내지 제 11 항 중 어느 한 항에 따른 방법을 수행하기 위한 프로그램 코드 수단을 포함하는, 컴퓨터 프로그램.
- 제 1 항 내지 제 11 항 중 어느 한 항에 따른 방법을 수행하기 위한 컴퓨터 판독가능한 매체 상에 저장된 컴퓨터 코드 수단을 포함하는, 컴퓨터 프로그램 제품.
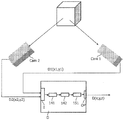
- 상이한 방향들로부터 획득된 이미지 데이터를 입력하기 위한 입력부 및 이미지의 포인트에 대해 윈도우-기반 매칭을 사용하여 상기 입력부에 의해 수신된 상기 이미지 데이터로부터 임시적인 깊이 맵을 결정하기 위한 디터미네이터(determinator)(141)를 포함하는 디바이스에 있어서,상기 디터미네이터에서, 상기 포인트들에 대한 후보 디스패러티 값들을 생성하기 위해 상기 이미지의 포인트에 대해 매칭 윈도우들의 세트가 사용되고,상기 디바이스는 이웃하는 포인트들에 대한 상기 후보 디스패러티 값들로부터 상기 포인트로 포인팅하는 단위 벡터들의 합의 놈의 적어도 z-성분을 각각의 포인트에 대해 최소화함으로써 상기 임시적인 깊이 맵을 기초로 하여 또 다른 깊이 맵을 제공하기 위해 구성되는 표면 필터(142)를 더 포함하는, 디바이스.
- 제 14 항에 있어서,상기 표면 필터는 상기 이웃하는 포인트들의 단위 벡터들의 합의 놈의 모든 성분들을 최소화하도록 구성되는, 디바이스.
- 제 14 항에 있어서,상기 디터미네이터는 매칭의 세트가 관심있는 포인트들이 상기 매칭 윈도우 에 대하여 편심적으로 위치되는 하나 이상의 매칭 윈도우들을 포함하도록 구성되는, 디바이스.
- 제 14 항에 있어서,상기 표면 필터는 상기 단위 벡터들의 합이 가중된 합이도록 구성되고,상기 계산에서의 각각의 단위 벡터들에 대한 상기 가중치는 상기 관심있는 포인트까지의 거리의 함수인, 디바이스.
- 제 14 항에 있어서,상기 표면 필터는 평균으로부터의 문턱치보다 더 많이 상이한 단위 벡터들을 상기 계산으로부터 삭제하기 위해 검사가 수행되도록 구성되는, 디바이스.
- 제 14 항에 있어서,상기 디바이스는 이미지들을 기록하기 위한 수단을 포함하는, 디바이스.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP06120051 | 2006-09-04 | ||
| EP06120051.5 | 2006-09-04 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20090052889A true KR20090052889A (ko) | 2009-05-26 |
Family
ID=38961271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020097006726A Ceased KR20090052889A (ko) | 2006-09-04 | 2007-09-04 | 이미지들로부터 깊이 맵을 결정하기 위한 방법 및 깊이 맵을 결정하기 위한 디바이스 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8326025B2 (ko) |
| EP (1) | EP2064675B1 (ko) |
| JP (1) | JP5249221B2 (ko) |
| KR (1) | KR20090052889A (ko) |
| CN (1) | CN101512601B (ko) |
| WO (1) | WO2008029345A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9070196B2 (en) | 2012-02-27 | 2015-06-30 | Samsung Electronics Co., Ltd. | Apparatus and method for estimating disparity using visibility energy model |
| US9245344B2 (en) | 2012-05-10 | 2016-01-26 | Samsung Electronics Co., Ltd. | Method and apparatus for acquiring geometry of specular object based on depth sensor |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8390821B2 (en) | 2005-10-11 | 2013-03-05 | Primesense Ltd. | Three-dimensional sensing using speckle patterns |
| JP5001286B2 (ja) | 2005-10-11 | 2012-08-15 | プライム センス リミティド | 対象物再構成方法およびシステム |
| US9330324B2 (en) | 2005-10-11 | 2016-05-03 | Apple Inc. | Error compensation in three-dimensional mapping |
| TWI433052B (zh) * | 2007-04-02 | 2014-04-01 | Primesense Ltd | 使用投影圖案之深度製圖 |
| WO2008155770A2 (en) * | 2007-06-19 | 2008-12-24 | Prime Sense Ltd. | Distance-varying illumination and imaging techniques for depth mapping |
| US8456517B2 (en) * | 2008-07-09 | 2013-06-04 | Primesense Ltd. | Integrated processor for 3D mapping |
| CN101673395B (zh) | 2008-09-10 | 2012-09-05 | 华为终端有限公司 | 图像拼接方法及装置 |
| EP2374110A4 (en) * | 2008-12-19 | 2013-06-05 | Saab Ab | SYSTEM AND METHOD FOR MIXING A SCENE WITH A VIRTUAL SCENARIO |
| KR101526866B1 (ko) * | 2009-01-21 | 2015-06-10 | 삼성전자주식회사 | 깊이 정보를 이용한 깊이 노이즈 필터링 방법 및 장치 |
| KR101675555B1 (ko) * | 2009-01-30 | 2016-11-11 | 톰슨 라이센싱 | 깊이 맵의 코딩 |
| US8462207B2 (en) * | 2009-02-12 | 2013-06-11 | Primesense Ltd. | Depth ranging with Moiré patterns |
| US8786682B2 (en) | 2009-03-05 | 2014-07-22 | Primesense Ltd. | Reference image techniques for three-dimensional sensing |
| US8717417B2 (en) | 2009-04-16 | 2014-05-06 | Primesense Ltd. | Three-dimensional mapping and imaging |
| US8933925B2 (en) * | 2009-06-15 | 2015-01-13 | Microsoft Corporation | Piecewise planar reconstruction of three-dimensional scenes |
| JP4934701B2 (ja) * | 2009-06-30 | 2012-05-16 | 株式会社日立製作所 | ステレオ画像処理装置およびステレオ画像処理方法 |
| WO2011013079A1 (en) * | 2009-07-30 | 2011-02-03 | Primesense Ltd. | Depth mapping based on pattern matching and stereoscopic information |
| US8830227B2 (en) | 2009-12-06 | 2014-09-09 | Primesense Ltd. | Depth-based gain control |
| US8982182B2 (en) | 2010-03-01 | 2015-03-17 | Apple Inc. | Non-uniform spatial resource allocation for depth mapping |
| WO2011140178A1 (en) * | 2010-05-04 | 2011-11-10 | Bae Systems National Security Solutions Inc. | Inverse stereo image matching for change detection |
| US8885890B2 (en) * | 2010-05-07 | 2014-11-11 | Microsoft Corporation | Depth map confidence filtering |
| CN103053167B (zh) | 2010-08-11 | 2016-01-20 | 苹果公司 | 扫描投影机及用于3d映射的图像捕获模块 |
| KR101640404B1 (ko) * | 2010-09-20 | 2016-07-18 | 엘지전자 주식회사 | 휴대 단말기 및 그 동작 제어방법 |
| US8983121B2 (en) * | 2010-10-27 | 2015-03-17 | Samsung Techwin Co., Ltd. | Image processing apparatus and method thereof |
| WO2012066501A1 (en) | 2010-11-19 | 2012-05-24 | Primesense Ltd. | Depth mapping using time-coded illumination |
| US9131136B2 (en) | 2010-12-06 | 2015-09-08 | Apple Inc. | Lens arrays for pattern projection and imaging |
| EP2679014B1 (en) * | 2011-02-23 | 2015-01-07 | Koninklijke Philips N.V. | Processing depth data of a three-dimensional scene |
| US9030528B2 (en) | 2011-04-04 | 2015-05-12 | Apple Inc. | Multi-zone imaging sensor and lens array |
| US8982117B2 (en) | 2011-06-22 | 2015-03-17 | Samsung Display Co., Ltd. | Display apparatus and method of displaying three-dimensional image using same |
| US8817073B2 (en) * | 2011-08-12 | 2014-08-26 | Himax Technologies Limited | System and method of processing 3D stereoscopic image |
| US20140241434A1 (en) * | 2011-10-11 | 2014-08-28 | Mediatek Inc | Method and apparatus of motion and disparity vector derivation for 3d video coding and hevc |
| US20130094753A1 (en) * | 2011-10-18 | 2013-04-18 | Shane D. Voss | Filtering image data |
| KR20130047822A (ko) * | 2011-11-01 | 2013-05-09 | 삼성전자주식회사 | 영상 처리 장치 및 방법 |
| JP5985661B2 (ja) | 2012-02-15 | 2016-09-06 | アップル インコーポレイテッド | 走査深度エンジン |
| US9571818B2 (en) * | 2012-06-07 | 2017-02-14 | Nvidia Corporation | Techniques for generating robust stereo images from a pair of corresponding stereo images captured with and without the use of a flash device |
| EP2868089B1 (en) * | 2012-06-28 | 2017-12-20 | HFI Innovation Inc. | Method and apparatus of disparity vector derivation in 3d video coding |
| US9843820B2 (en) | 2012-07-05 | 2017-12-12 | Mediatek Inc | Method and apparatus of unified disparity vector derivation for 3D video coding |
| US9299152B2 (en) * | 2012-12-20 | 2016-03-29 | Hong Kong Applied Science And Technology Research Institute Co., Ltd. | Systems and methods for image depth map generation |
| US9171373B2 (en) * | 2012-12-26 | 2015-10-27 | Ncku Research And Development Foundation | System of image stereo matching |
| CN103974055B (zh) * | 2013-02-06 | 2016-06-08 | 城市图像科技有限公司 | 3d照片生成系统及方法 |
| WO2014166109A1 (en) * | 2013-04-12 | 2014-10-16 | Mediatek Singapore Pte. Ltd. | Methods for disparity vector derivation |
| US10009621B2 (en) * | 2013-05-31 | 2018-06-26 | Qualcomm Incorporated | Advanced depth inter coding based on disparity of depth blocks |
| US20140363097A1 (en) | 2013-06-06 | 2014-12-11 | Etron Technology, Inc. | Image capture system and operation method thereof |
| CN105359520B (zh) * | 2013-07-15 | 2017-12-12 | 联发科技(新加坡)私人有限公司 | 在三维视频编码中的深度编码方法和装置 |
| WO2015006900A1 (en) * | 2013-07-15 | 2015-01-22 | Mediatek Singapore Pte. Ltd. | A disparity derived depth coding method |
| FR3013488B1 (fr) | 2013-11-18 | 2017-04-21 | Univ De Nice (Uns) | Procede d'estimation de la vitesse de deplacement d'une camera |
| TW201528775A (zh) | 2014-01-02 | 2015-07-16 | Ind Tech Res Inst | 景深圖校正方法及系統 |
| JP6401922B2 (ja) * | 2014-03-13 | 2018-10-10 | 株式会社メガチップス | 物体検出装置 |
| CN105082888A (zh) * | 2014-05-06 | 2015-11-25 | 低碳动能开发股份有限公司 | 一种轮胎胎纹侦测装置 |
| US9858719B2 (en) | 2015-03-30 | 2018-01-02 | Amazon Technologies, Inc. | Blended reality systems and methods |
| JP2017021759A (ja) * | 2015-07-15 | 2017-01-26 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| KR20180133394A (ko) * | 2016-04-06 | 2018-12-14 | 소니 주식회사 | 화상 처리 장치와 화상 처리 방법 |
| US10237530B1 (en) * | 2016-06-29 | 2019-03-19 | Amazon Technologies, Inc. | Depth-map augmentation techniques |
| US10212408B1 (en) | 2016-06-29 | 2019-02-19 | Amazon Technologies, Inc. | Depth-map augmentation techniques |
| KR102507383B1 (ko) * | 2016-11-08 | 2023-03-08 | 한국전자통신연구원 | 직사각형 윈도우를 이용한 스테레오 정합 방법 및 스테레오 정합 시스템 |
| US10445861B2 (en) * | 2017-02-14 | 2019-10-15 | Qualcomm Incorporated | Refinement of structured light depth maps using RGB color data |
| KR102468897B1 (ko) | 2017-10-16 | 2022-11-21 | 삼성전자주식회사 | 깊이 값을 추정하는 방법 및 장치 |
| CN110070500B (zh) * | 2019-03-21 | 2020-12-08 | 浙江大学 | 一种深度图像的后处理方法 |
| CN111223059B (zh) * | 2020-01-04 | 2022-02-11 | 西安交通大学 | 一种基于引导滤波器的鲁棒深度图结构重建和去噪方法 |
| US12590798B2 (en) | 2021-05-11 | 2026-03-31 | Apple Inc. | Multi-sensor depth mapping |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4532546A (en) | 1984-01-04 | 1985-07-30 | Itek Corporation | Real time single frame memory for converting video interlaced formats |
| EP1418766A3 (en) * | 1998-08-28 | 2010-03-24 | Imax Corporation | Method and apparatus for processing images |
| US6269175B1 (en) * | 1998-08-28 | 2001-07-31 | Sarnoff Corporation | Method and apparatus for enhancing regions of aligned images using flow estimation |
| JP4524514B2 (ja) * | 1999-08-05 | 2010-08-18 | ソニー株式会社 | 画像処理装置、画像処理方法、および記録媒体 |
| KR100843112B1 (ko) * | 2000-09-07 | 2008-07-02 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 이미지 매칭 |
| JP3915664B2 (ja) * | 2002-05-15 | 2007-05-16 | 日本電気株式会社 | 画像処理装置及びそれに用いる画像処理方法並びにそのプログラム |
| CN1739119A (zh) * | 2003-01-17 | 2006-02-22 | 皇家飞利浦电子股份有限公司 | 全深度图采集 |
-
2007
- 2007-09-04 KR KR1020097006726A patent/KR20090052889A/ko not_active Ceased
- 2007-09-04 US US12/439,691 patent/US8326025B2/en not_active Expired - Fee Related
- 2007-09-04 CN CN2007800328033A patent/CN101512601B/zh not_active Expired - Fee Related
- 2007-09-04 JP JP2009526255A patent/JP5249221B2/ja not_active Expired - Fee Related
- 2007-09-04 EP EP07826248A patent/EP2064675B1/en not_active Not-in-force
- 2007-09-04 WO PCT/IB2007/053550 patent/WO2008029345A1/en not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9070196B2 (en) | 2012-02-27 | 2015-06-30 | Samsung Electronics Co., Ltd. | Apparatus and method for estimating disparity using visibility energy model |
| US9245344B2 (en) | 2012-05-10 | 2016-01-26 | Samsung Electronics Co., Ltd. | Method and apparatus for acquiring geometry of specular object based on depth sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2064675B1 (en) | 2012-11-21 |
| EP2064675A1 (en) | 2009-06-03 |
| CN101512601B (zh) | 2013-07-31 |
| WO2008029345A1 (en) | 2008-03-13 |
| US8326025B2 (en) | 2012-12-04 |
| JP5249221B2 (ja) | 2013-07-31 |
| JP2010502945A (ja) | 2010-01-28 |
| CN101512601A (zh) | 2009-08-19 |
| US20090324059A1 (en) | 2009-12-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8326025B2 (en) | Method for determining a depth map from images, device for determining a depth map | |
| US8385630B2 (en) | System and method of processing stereo images | |
| EP1442614B1 (en) | Method and apparatus for image matching | |
| CN103814306B (zh) | 深度测量质量增强 | |
| RU2382406C1 (ru) | Способ улучшения карты диспарантности и устройство для реализации способа | |
| US8897545B2 (en) | Apparatus and method for determining a confidence value of a disparity estimate | |
| Jain et al. | Exploiting global connectivity constraints for reconstruction of 3D line segments from images | |
| Rossi et al. | Joint graph-based depth refinement and normal estimation | |
| CN117456114B (zh) | 基于多视图的三维图像重建方法及系统 | |
| WO2015179216A1 (en) | Orthogonal and collaborative disparity decomposition | |
| Yuan et al. | 3D reconstruction of background and objects moving on ground plane viewed from a moving camera | |
| EP1997072B1 (en) | Method for determining a depth map from images, device for determining a depth map | |
| Saxena et al. | 3-d reconstruction from sparse views using monocular vision | |
| Luo et al. | Stereo matching and occlusion detection with integrity and illusion sensitivity | |
| Lee et al. | Refinement of inverse depth plane in textureless and occluded regions in a multiview stereo matching scheme | |
| Yin et al. | Improving Depth Maps by Nonlinear Diffusion. | |
| Navarro et al. | Variational scene flow and occlusion detection from a light field sequence | |
| Turetken et al. | Temporally consistent layer depth ordering via pixel voting for pseudo 3D representation | |
| Leistner | Deep Learning-Based Depth Estimation from Light Fields | |
| Laycock et al. | Image Registration in a Coarse Three‐Dimensional Virtual Environment | |
| Okarma et al. | Vector median splatting for image based rendering | |
| Alessandrini et al. | Efficient and automatic stereoscopic videos to N views conversion for autostereoscopic displays | |
| Cavan | Reconstruction of 3d points from uncalibrated underwater video | |
| Duchesne et al. | Comparison of matching criteria for the interposition problem in augmented reality | |
| Eisemann et al. | 3-D Cinematography with Approximate or No Geometry |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-3-3-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |