KR20130143592A - 오버헤드 로봇시스템과 그 작동 방법 - Google Patents
오버헤드 로봇시스템과 그 작동 방법 Download PDFInfo
- Publication number
- KR20130143592A KR20130143592A KR1020137013185A KR20137013185A KR20130143592A KR 20130143592 A KR20130143592 A KR 20130143592A KR 1020137013185 A KR1020137013185 A KR 1020137013185A KR 20137013185 A KR20137013185 A KR 20137013185A KR 20130143592 A KR20130143592 A KR 20130143592A
- Authority
- KR
- South Korea
- Prior art keywords
- gripper
- platform
- robotic system
- conveying
- overhead
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0421—Storage devices mechanical using stacker cranes with control for stacker crane operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0464—Storage devices mechanical with access from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G63/00—Transferring or trans-shipping at storage areas, railway yards or harbours or in opening mining cuts; Marshalling yard installations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/07—Floor-to-roof stacking devices, e.g. "stacker cranes", "retrievers"
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Warehouses Or Storage Devices (AREA)
- Specific Conveyance Elements (AREA)
- Manipulator (AREA)
- Stacking Of Articles And Auxiliary Devices (AREA)
Abstract
Description
도 2는 본 발명에 따른 시스템의 또다른 예를 나타낸다.
도 3은 본 발명에 따른 로봇 제어 장치의 예를 나타낸다.
도 4는 본 발명에 따른 시스템의 특성을 더 상세하게 나타낸다.
도 5 역시 본 발명에 따른 시스템의 특성을 나타낸다.
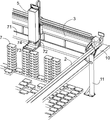
도 6은 도 1의 예의 이송수단을 나타낸다.
도 7은 본 발명에 따른 시스템의 또다른 예를 나타낸다.
도 8은 본 발명에 따른 방법의 예의 플로우챠트를 나타낸다.
Claims (17)
- 창고 영역(1)에 위치한 개체 위로 이동하는 갠트리 유닛(3),
상기 갠트리 유닛(3)에 부착되어, 갠트리 유닛을 따라 이동하며, 창고 영역에 도달하여 개체 또는 개체들의 스택을 픽업 및 릴리스하고, 개체 또는 개체들의 스택을 들어올려 또다른 위치로 이송하는 그리퍼(5), 및
갠트리 유닛(3) 및 그리퍼(5)의 작동을 제어하는 로봇 제어 시스템(4)으로 이루어지고, 창고 영역(1)에 위치하며 적층적재되는 개체를 이송하는 오버헤드 로봇시스템(7)으로서,
이 시스템은, 그리퍼에 파지된 개체 또는 개체들의 스택(7)에 가까우면서 그 아래에 위치하여, 단일의 개체를 그리퍼(5)로부터 그 위로 릴리스할 수 있도록 그리퍼(5)에 위치된 플랫폼(15,74)과, 개체를 플랫폼으로부터 창고 영역(1)의 가장자리로 이송시키는 이송수단(9,71,73)을 더 포함하고,
상기 로봇 제어 시스템(4)은 플랫폼(15)과 이송수단 (9,71,73)의 작동을 제어하기 위한 제어 수단(22)을 포함하는 것을 특징으로 하는 오버헤드 로봇시스템. - 제 1 항에 있어서, 상기 이송수단(9,71,73)은 개체를 플랫폼(15,74)으로부터 멀리 이송하는 이송부재(14,73)를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템.
- 제 2 항에 있어서, 상기 이송수단(9)은, 갠트리 유닛(3)에 부착되어 갠트리 유닛을 따라 이동하되, 그리퍼(5)의 위치 및 이 위치를 넘어 이동할 수 있으며, 상기 플랫폼(15)과 이송부재(14)에 연결되는 캐리어(23)를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템.
- 제 3 항에 있어서, 상기 이송수단(9)은 상호간에 교차하는 두개의 날개부(13A, 13B)를 포함하고, 제 1의 날개부(13A)는 캐리어(23)에 연결되고, 제 2의 날개부(13B)는 플랫폼(15) 및 이송부재(14)에 연결되며, 제 2의 날개부는, 이송부재(9)가 그리퍼의 위치에 있을 때, 그리퍼(5)의 아래로 확장되는 것을 특징으로 하는 오버헤드 로봇시스템.
- 제 4 항에 있어서, 상기 프레임 워크(13)는, 제 1의 날개부(13A)와 제 2의 날개부(13B)에 부착되는 지지부(20)를 포함하는 것을 특징으로 오버헤드 로봇시스템.
- 제 3 항 내지 제 5 항 중 어느 한 항에 있어서, 상기 캐리어(23)는, 캐리어의 이동을 위해, 모터(24)와 궤도 차륜(17)을 포함하는 것을 특징으로 오버헤드 로봇시스템.
- 제 1 항 내지 제 6 항 중 어느 한 항에 있어서, 로봇 제어 시스템(4)과 이송수단(9) 사이에 케이블링(18)을 포함하는 것을 특징으로 하는 오버헤드 로봇시스템.
- 제 2 항에 있어서, 상기 이송수단(71,73)은, 이송부재(73)에 의해 이송된 개체를 창고 영역의 가장자리로 이송시키기 위해, 갠트리 장치(3)이 그 아래에 부착된 종방향 컨베이어(71)를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템.
- 제 8 항에 있어서, 상기 종방향 컨베이어(71)는 벨트 컨베이어인 것을 특징으로 하는 오버헤드 로봇시스템.
- 제 1 항 내지 제 9 항 중 어느 한 항에 있어서, 창고 영역(1)의 가장자리에 위치하여, 로봇 제어 시스템(4)과 연계해서, 이송수단(9,71,73)으로부터 개체(7)를 수용하는 종방향 컨베이어 장치(10)를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템.
- 시스템의 그리퍼(5)를 픽업할 개체(7) 위로 향하게 하는 단계(81), 및,
그리퍼(5)가 픽업 가능한 개체들의 스택의 맨 아래에서 소정의 개체를 픽업하는 단계를 포함하는 오버헤드 로봇시스템의 작동 방법으로서,
창고 영역의 위에서 시스템의 플랫폼(15,74)을 그리퍼(5)내의 맨아래의 개체의 아래에 위치시키고 그리퍼 내에서 개체를 상승시키는 배치 단계(83),
맨아래의 개체가 그리퍼(5)로부터 플랫폼(15,74)상으로 릴리스되는 단계(84), 및,
개체가 플랫폼으로부터 창고 영역의 가장자리로 이송되는 이송 단계(85)를 더 포함하는 것을 특징으로 하는 오버헤드 로봇시스템의 작동 방법. - 제 11 항에 있어서, 상기 배치 단계(83)는, 상기 플랫폼(15)을 포함하고 오버헤드 로봇시스템의 갠트리 장치(3)에 부착된 이송수단(9)을 그리퍼(5)의 위치로 이송시키는 단계를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템의 작동 방법.
- 제 12 항에 있어서, 상기 이송 단계(85)는, 이송수단(9)으로서 개체를 창고 영역의 가장자리로 이송시키고, 개체(7)를 플랫폼(15)으로부터 종방향 컨베이어 장치(10)로 이송시키는 단계를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템의 작동 방법.
- 제 1 항 내지 제 4 항 중 어느 한 항에 있어서, 종방향 컨베이어 장치(10)로 이송하는 단계는, 개체의 이송 중에 종방향 컨베이어 장치(10)를 정적으로 유지하는 하위 단계를 포함하는 것을 특징으로 오버헤드 로봇시스템의 작동 방법.
- 제 11 항에 있어서, 상기 배치 단계(83)는 그리퍼(5)에 부착된 아암부재(72)를 하방으로 하강시키는 단계와, 아암부재에 연결된 플랫폼을, 그리퍼 내에서 상승된 개체(7)의 아래로 이송시키는 하위 단계를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템의 작동 방법.
- 제 15 항에 있어서, 상기 이송 단계(85)는, 개체를 플랫폼(74)으로부터 갠트리 유닛(3)의 아래에 부착된 종방향 컨베이어(71)로 이송시키는 단계와, 개체를 종방향 컨베이어로부터 창고 영역의 가장자리로 이송시키는 단계를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템의 작동 방법.
- 제 16 항에 있어서, 적어도 개체가 종방향 컨베이어(71)로부터 종방향 컨베이어 장치(10)로 이송되는 동안에는 창고 영역의 가장자리에 위치된 종방향 컨베이어 장치(10)가 정적인 상태를 유지하는 하위 단계를 포함하는 것을 특징으로 하는 오버헤드 로봇시스템의 작동 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FI20115267A FI123447B (fi) | 2011-03-18 | 2011-03-18 | Siltarobottijärjestelmä ja menetelmä sen käyttämiseksi |
| FI20115267 | 2011-03-18 | ||
| PCT/FI2012/050235 WO2012127102A1 (en) | 2011-03-18 | 2012-03-12 | Overhead robot system and a method for its operation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20130143592A true KR20130143592A (ko) | 2013-12-31 |
| KR101797798B1 KR101797798B1 (ko) | 2017-11-14 |
Family
ID=43806477
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137013185A Active KR101797798B1 (ko) | 2011-03-18 | 2012-03-12 | 오버헤드 로봇시스템과 그 작동 방법 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US9272845B2 (ko) |
| EP (1) | EP2630061B1 (ko) |
| KR (1) | KR101797798B1 (ko) |
| CA (1) | CA2817180C (ko) |
| DK (1) | DK2630061T3 (ko) |
| ES (1) | ES2538019T3 (ko) |
| FI (1) | FI123447B (ko) |
| IL (1) | IL227915A (ko) |
| PL (1) | PL2630061T3 (ko) |
| RU (1) | RU2555083C2 (ko) |
| WO (1) | WO2012127102A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220026612A (ko) * | 2015-06-08 | 2022-03-04 | 오카도 이노베이션 리미티드 | 물체 보관, 핸들링, 및 회수 시스템 및 방법 |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3192753A1 (en) | 2012-05-11 | 2017-07-19 | Ocado Innovation Limited | Storage systems and methods for retrieving units from a storage system |
| JP6305213B2 (ja) * | 2014-05-29 | 2018-04-04 | 株式会社東芝 | 取出装置および方法 |
| GB201409883D0 (en) | 2014-06-03 | 2014-07-16 | Ocado Ltd | Methods, systems, and apparatus for controlling movement of transporting devices |
| GB2527543A (en) * | 2014-06-25 | 2015-12-30 | Ocado Innovation Ltd | System and method for managing shipping containers |
| BR102014023154B1 (pt) | 2014-09-18 | 2022-03-29 | Carmine Alexandre Cifelli | Base modular para compor instalações e método para estocagem por empilhamento e movimentação de caixas |
| EP3038063A1 (en) * | 2014-12-23 | 2016-06-29 | Bossi, Raffaele | Automatic dispenser of pellets, firewood and biofuel in general for residential heating systems |
| JP6256702B2 (ja) * | 2014-12-25 | 2018-01-10 | 株式会社ダイフク | 物品搬送用容器昇降搬送装置 |
| US9758301B2 (en) * | 2015-03-24 | 2017-09-12 | Joseph Porat | System and method for overhead warehousing |
| US9617075B2 (en) * | 2015-03-24 | 2017-04-11 | Joseph Porat | System and method for overhead warehousing |
| JP6347333B2 (ja) * | 2015-06-01 | 2018-06-27 | 株式会社ダイフク | 平面保管設備における入出庫装置の制御方法 |
| NO339783B1 (en) * | 2015-06-11 | 2017-01-30 | Jakob Hatteland Logistics As | Storage system |
| ES2922990T3 (es) | 2016-01-08 | 2022-09-22 | Berkshire Grey Operating Company Inc | Sistemas de adquisición y movimiento de objetos |
| US10350755B2 (en) | 2016-02-08 | 2019-07-16 | Berkshire Grey, Inc. | Systems and methods for providing processing of a variety of objects employing motion planning |
| CN110049934B (zh) | 2016-12-09 | 2022-02-25 | 伯克希尔格雷股份有限公司 | 用于处理在车辆中设置的物品的系统和方法 |
| US10029865B1 (en) * | 2016-12-16 | 2018-07-24 | Amazon Technologies, Inc. | Parallel recirculating gantry system on a rollercoaster-style track |
| US9988216B1 (en) | 2016-12-16 | 2018-06-05 | Amazon Technologies, Inc. | Parallel vertical recirculating gantry system |
| CN106826820B (zh) * | 2017-01-16 | 2020-06-05 | 北京京东乾石科技有限公司 | 直角坐标机器人的控制方法及系统 |
| EP4527761A3 (en) | 2017-03-17 | 2025-06-11 | Berkshire Grey Operating Company, Inc. | Systems and methods for processing objects including a linear gantry system |
| CN114852726B (zh) | 2017-03-20 | 2024-01-02 | 伯克希尔格雷营业股份有限公司 | 用于处理包括运输车辆的物体的系统和方法 |
| EP3601107A1 (en) | 2017-03-20 | 2020-02-05 | Berkshire Grey, Inc. | Systems and methods for processing objects including mobile matrix carrier systems |
| CA3056782C (en) | 2017-03-20 | 2023-03-14 | Berkshire Grey, Inc. | Systems and methods for processing objects including a zone gantry system |
| EP3601108A1 (en) | 2017-03-20 | 2020-02-05 | Berkshire Grey, Inc. | Systems and methods for processing objects including an auto-shuttle system |
| CA3057367C (en) | 2017-03-23 | 2023-01-10 | Berkshire Grey, Inc. | Systems and methods for processing objects, including automated mobile matrix bins |
| ES2973481T3 (es) | 2017-03-23 | 2024-06-20 | Berkshire Grey Operating Company Inc | Sistema y método para procesar objetos, incluyendo portadores matriciales móviles automatizados |
| US10941000B2 (en) | 2017-03-23 | 2021-03-09 | Berkshire Grey, Inc. | Systems and methods for processing objects, including automated linear processing stations |
| US10243217B2 (en) * | 2017-05-24 | 2019-03-26 | Nanotek Instruments, Inc. | Alkali metal battery having a deformable quasi-solid electrode material |
| BR112020004016A2 (pt) | 2017-08-31 | 2020-09-08 | Monsanto Technology Llc | sistema de entrega de sementes |
| PL234974B1 (pl) * | 2017-09-19 | 2020-05-18 | Rosinski Packaging Spolka Z Ograniczona Odpowiedzialnoscia | Dozownik |
| CN114620398B (zh) | 2017-10-27 | 2024-01-02 | 伯克希尔格雷营业股份有限公司 | 对象处理系统 |
| EP3715284B1 (en) | 2017-11-21 | 2023-03-22 | Solovianenko, Sergey Vladimirovich | Automatic system and method for storing materials and assembling packages therefrom |
| CN108045972A (zh) * | 2017-12-14 | 2018-05-18 | 梅芳艳 | 一种智能分拣码垛系统 |
| US10843333B2 (en) | 2018-03-05 | 2020-11-24 | Berkshire Grey, Inc. | Systems and methods for processing objects, including automated re-circulating processing stations |
| WO2020014725A2 (de) | 2018-07-20 | 2020-01-23 | Tgw Logistics Group Gmbh | Verfahren und kommissionierlager zum lagern und kommissionieren von waren |
| DE102018215780A1 (de) * | 2018-09-18 | 2020-03-19 | Robert Bosch Gmbh | Vorrichtung und Verfahren zum Handhaben von Lagereinheiten |
| EP3871172A1 (en) | 2018-10-25 | 2021-09-01 | Berkshire Grey, Inc. | Systems and methods for learning to extrapolate optimal object routing and handling parameters |
| US11866224B2 (en) | 2019-06-24 | 2024-01-09 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing shipping of orders in an order fulfillment center |
| WO2021142498A1 (de) | 2020-01-17 | 2021-07-22 | Tgw Logistics Group Gmbh | Verfahren und kommissionierlager zum lagern und kommissionieren von waren |
| WO2021178830A1 (en) | 2020-03-06 | 2021-09-10 | Berkshire Grey, Inc. | Systems and methods for providing order fulfillment using a spiral tower system |
| WO2021178835A2 (en) | 2020-03-06 | 2021-09-10 | Berkshire Grey, Inc. | Systems and methods for providing order fulfillment using a recirculating routing system |
| US12269681B2 (en) | 2020-03-06 | 2025-04-08 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing order fulfillment using a routing conveyance system |
| US12129125B2 (en) | 2020-03-06 | 2024-10-29 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing order fulfillment using a conveyor takeaway system |
| JP7294198B2 (ja) * | 2020-03-13 | 2023-06-20 | 株式会社ダイフク | 物品保管設備 |
| US12258216B2 (en) | 2020-06-11 | 2025-03-25 | Nimble Robotics, Inc. | Automated delivery vehicle |
| EP4132868B1 (en) | 2021-01-05 | 2025-05-14 | Martistel Innovation Fzco | Matrix-picking |
| WO2023059485A1 (en) | 2021-10-06 | 2023-04-13 | Berkshire Grey Operating Company, Inc. | Dynamic processing of objects provided in elevated vehicles with evacuation systems and methods for receiving objects |
| WO2023064465A1 (en) | 2021-10-13 | 2023-04-20 | Berkshire Grey Operating Company, Inc. | Robotic put wall systems and methods with mobile destination location assemblies |
| CN115180335A (zh) * | 2022-07-15 | 2022-10-14 | 北京德诚科技有限责任公司 | 一种货物存取系统 |
| CN115417045A (zh) * | 2022-09-07 | 2022-12-02 | 北京德诚科技有限责任公司 | 一种缓存台及货物存取系统 |
| CN115417046A (zh) * | 2022-09-07 | 2022-12-02 | 北京德诚科技有限责任公司 | 一种取放机构及货物存取系统 |
| CN115676198A (zh) * | 2022-09-26 | 2023-02-03 | 北京德诚科技有限责任公司 | 一种推箱组件及货物存取系统 |
| KR102877129B1 (ko) | 2023-07-11 | 2025-10-27 | (주)코윈테크 | 물류 자동화 운반 겐트리 시스템 |
| FI131766B1 (en) * | 2024-02-01 | 2025-11-18 | Cimcorp Oy | Manufacturing arrangements for formation and aging processes for rechargeable battery cells |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2701065A (en) | 1950-09-06 | 1955-02-01 | Charles A Bertel | Apparatus for storing and handling containers |
| US3519151A (en) * | 1968-05-28 | 1970-07-07 | Triax Co | Automatic storage apparatus |
| US3519148A (en) * | 1969-04-16 | 1970-07-07 | Triax Co | Automatic storage apparatus |
| SU547377A1 (ru) | 1974-04-15 | 1977-02-25 | Ленинградский Государственный Проектный Институт Ссср | Устройство дл разгрузки и загрузки стеллажей штучными грузами |
| SU562464A1 (ru) | 1974-12-18 | 1977-06-25 | Ленинградский Государственный Проектный Институт | Устройство дл разгрузки и загрузки стеллажей штучными грузами |
| DE2629718A1 (de) | 1976-07-02 | 1978-01-05 | Krupp Gmbh | Verfahren und einrichtung zum umschlagen von stapelbaren behaeltern |
| FI105668B (fi) | 1995-10-02 | 2000-09-29 | Cimcorp Oy | Poimintajärjestelmä |
| US6113336A (en) * | 1999-10-05 | 2000-09-05 | Chang; Tien-Sheng | Warehousing system having a conveying device for transferring articles between two levels of a multistory building |
| ITPO20010004A1 (it) * | 2001-04-24 | 2002-10-24 | Immobiliare La Valluccia Srl | Impianto di magazzinaggio automatico |
| US6652211B2 (en) | 2001-12-11 | 2003-11-25 | Paceco Corp. | Buffer straddle crane for cargo container handling operations |
| AU2003231430B8 (en) | 2002-05-13 | 2009-07-30 | Bakvertisi Limited | Apparatus for transporting containers |
-
2011
- 2011-03-18 FI FI20115267A patent/FI123447B/fi active IP Right Grant
-
2012
- 2012-03-12 RU RU2013146551/11A patent/RU2555083C2/ru active
- 2012-03-12 DK DK12716478.8T patent/DK2630061T3/en active
- 2012-03-12 WO PCT/FI2012/050235 patent/WO2012127102A1/en not_active Ceased
- 2012-03-12 KR KR1020137013185A patent/KR101797798B1/ko active Active
- 2012-03-12 CA CA2817180A patent/CA2817180C/en active Active
- 2012-03-12 US US14/006,039 patent/US9272845B2/en active Active
- 2012-03-12 EP EP12716478.8A patent/EP2630061B1/en active Active
- 2012-03-12 ES ES12716478.8T patent/ES2538019T3/es active Active
- 2012-03-12 PL PL12716478T patent/PL2630061T3/pl unknown
-
2013
- 2013-08-11 IL IL227915A patent/IL227915A/en active IP Right Grant
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220026612A (ko) * | 2015-06-08 | 2022-03-04 | 오카도 이노베이션 리미티드 | 물체 보관, 핸들링, 및 회수 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2012127102A9 (en) | 2012-11-08 |
| IL227915A (en) | 2017-07-31 |
| KR101797798B1 (ko) | 2017-11-14 |
| RU2013146551A (ru) | 2015-04-27 |
| IL227915A0 (en) | 2013-09-30 |
| US9272845B2 (en) | 2016-03-01 |
| FI123447B (fi) | 2013-05-15 |
| RU2555083C2 (ru) | 2015-07-10 |
| FI20115267A7 (fi) | 2012-09-19 |
| EP2630061B1 (en) | 2015-03-04 |
| WO2012127102A1 (en) | 2012-09-27 |
| DK2630061T3 (en) | 2015-06-15 |
| ES2538019T3 (es) | 2015-06-16 |
| FI20115267L (fi) | 2012-09-19 |
| FI20115267A0 (fi) | 2011-03-18 |
| CA2817180A1 (en) | 2012-09-27 |
| EP2630061A1 (en) | 2013-08-28 |
| CA2817180C (en) | 2018-03-20 |
| PL2630061T3 (pl) | 2015-08-31 |
| US20140017052A1 (en) | 2014-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20130143592A (ko) | 오버헤드 로봇시스템과 그 작동 방법 | |
| CN111137808B (zh) | 搬运小车 | |
| JP6046625B2 (ja) | ワーク移送装置を伴う生産セル、およびワークと部品キャリヤ用の輸送装置 | |
| CN113752285B (zh) | 储存系统 | |
| CN209192822U (zh) | 搬运小车 | |
| CN103224142B (zh) | 一种制件自动装筐及传输系统 | |
| US8342792B2 (en) | Article separation directly on storage and retrieval device | |
| CN107298272B (zh) | 一种物流取码系统的装卸装置 | |
| CN112469646B (zh) | 卸载设备和卸载站以及从储存容器卸载物项的方法 | |
| WO2016031351A1 (ja) | ピッキングシステムとピッキング方法 | |
| CN106470919A (zh) | 分拣系统及分拣方法 | |
| JP2008285251A (ja) | 板材搬送収納システムおよび板材搬送収納方法 | |
| CN211768039U (zh) | 仓储系统 | |
| KR20110102410A (ko) | 유리 시트의 고속 이송 방법 및 장치 | |
| CN110612261A (zh) | 容器更换设备 | |
| CA3257773A1 (en) | APPARATUS AND METHOD FOR PRODUCING COMBINED CHARGE UNITS | |
| KR102008306B1 (ko) | 플랫보드 자동 공급시스템 | |
| JP2000168957A (ja) | 箱詰め包装体の自動段積み装置 | |
| JP2019119553A (ja) | 物品搬送設備 | |
| JP5258122B2 (ja) | 荷運搬具供給排出装置 | |
| JP5130789B2 (ja) | 板材加工システム | |
| JPH09136718A (ja) | パレット出し入れ装置 | |
| CN119821895A (zh) | 一种砂芯远距离空中立体运输系统及方法 | |
| KR20240149595A (ko) | 대차 방식의 파레트 공급장치 | |
| JP3619691B2 (ja) | 農産物の選別箱詰装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| FPAY | Annual fee payment |
Payment date: 20201012 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20211015 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20221014 Year of fee payment: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 9 |