KR20160056671A - 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템 및 이를 이용한 무인 운송 서비스 방법 - Google Patents
무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템 및 이를 이용한 무인 운송 서비스 방법 Download PDFInfo
- Publication number
- KR20160056671A KR20160056671A KR1020140157284A KR20140157284A KR20160056671A KR 20160056671 A KR20160056671 A KR 20160056671A KR 1020140157284 A KR1020140157284 A KR 1020140157284A KR 20140157284 A KR20140157284 A KR 20140157284A KR 20160056671 A KR20160056671 A KR 20160056671A
- Authority
- KR
- South Korea
- Prior art keywords
- unmanned
- cargo
- tracking
- information
- air vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
- G05D1/102—Simultaneous control of position or course in three dimensions specially adapted for aircraft specially adapted for vertical take-off of aircraft
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/083—Shipping
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Economics (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Entrepreneurship & Innovation (AREA)
- Strategic Management (AREA)
- Theoretical Computer Science (AREA)
- Development Economics (AREA)
- General Business, Economics & Management (AREA)
- Tourism & Hospitality (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
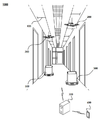
실내 천장에 구비되며, 적어도 하나 이상의 표지부들이 구비된 복수 개의 경로로 구성된 트래킹 라인(100); 상기 적어도 하나 이상의 표지부들을 따라 비행이동하며, 하부에 화물을 수용할 수 있는 수용체가 구비된 무인 비행체(200); 및 상기 무인 비행체(200)의 위치에 따라 이동하며, 상기 화물을 수용할 수 있는 수용체가 구비된 무인 드론(500); 트래킹 인터페이스를 이용하여 사용자가 원하고자 하는 배송지점의 정보가 포함된 화물배송 요청신호를 제공하는 휴대단말(400); 및 상기 휴대단말(400)에서 제공된 상기 화물배송 요청신호에 상응하는 경로 명령 정보를 산출하여 상기 무인 비행체에 제공하는 트래킹 서버(300);를 포함하고, 상기 무인 비행체(200)는 상기 경로 명령 정보에 따라 상기 트래킹 라인(100)을 이동하는 것을 특징으로 한다.
Description
도 2는 본 발명의 실시 예에 따른 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템을 나타낸 예시도이다.
도 3은 도 2에 도시된 트래킹 라인의 일 예를 설명하기 위한 예시도이다.
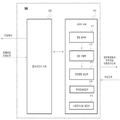
도 4는 도 2에 도시된 무인 비행체의 구성을 설명하기 위한 블록도이다.
도 5는 도 4에 도시된 MCU의 블록도이다.
도 6은 도 4에 도시된 라인트레이싱 센싱부의 일 예를 나타낸 예시도이다.
도 7은 트래킹 라인을 따라 이동하는 라인트레이싱 센싱부의 모습을 나타낸 예시도이다.
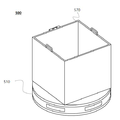
도 8은 무인 드론의 일 예를 나타낸 예시도이다.
도 9은 화물 수용부와 몸체부가 결속되는 과정을 나타낸 예시도이다.
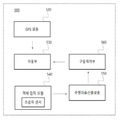
도 10은 무인 드론 내부의 구성을 나타낸 블록도이다.
도 11 내지 도 13은 객체가 감지될 경우, 무인 드론의 이동하는 과정을 나타낸 순서도이다.
도 14는 도 11 내지 도 13에 도시된 무인 드론의 이동과정을 상부도로 나타낸 예시도이다.
도 15는 보호 케이스의 일 예를 나타낸 예시도이다.
도 16은 도 2에 도시된 트래킹 서버(300)의 블록도이다.
도 17은 트래킹 인터페이스를 제공하는 휴대단말을 나타낸 예시도이다.
도 18은 본 발명의 실시 예에 따른 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템을 이용한 무인 배송 서비스 방법을 설명하기 위한 흐름도이다.
도 19는 도 18에 도시된 S120의 흐름도이다.

120: 태그 모듈 200: 무인 비행체
201: 회전구동체 202: 방향조작부
210: 몸체부 220: RFID 리더기
230: 라인트레이싱 센싱부 240: 기울기 조절부
250: 기울기 센싱모듈 260: 초음파 거리센서모듈
270: MCU 271: 메모리
272: 경로 제어/처리부 273: 에러신호 생성부
274: 통신모듈 290: 보호 케이스
300: 트래킹 서버 310: 관리자 서버
311: 경로 탐색부 312: 경로 추출부
313: 경로명령 생성부 320: 클라이언트 서버
311: 경로 탐색부 312: 경로 추출부
313: 경로명령 생성부 400: 휴대단말
500: 무인 드론 510: 몸체부
511: 결속부재 520: GPS 모듈
530: 이동부 540: 객체 감지 모듈
550: 주행좌표산출모듈 560: 구동제어부
570: 화물 수용부 571: 돌출부재
A ~ H: 표지부점
Claims (10)
- 실내 천장에 구비되며, 적어도 하나 이상의 표지부들이 구비된 복수 개의 경로로 구성된 트래킹 라인(100);
상기 적어도 하나 이상의 표지부들을 따라 비행이동하며, 하부에 화물을 수용할 수 있는 수용체가 구비된 무인 비행체(200); 및
상기 무인 비행체(200)의 위치에 따라 이동하며, 상기 화물을 수용할 수 있는 수용체가 구비된 무인 드론(500);
트래킹 인터페이스를 이용하여 사용자가 원하고자 하는 배송지점의 정보가 포함된 화물배송 요청신호를 제공하는 휴대단말(400); 및
상기 휴대단말(400)에서 제공된 상기 화물배송 요청신호에 상응하는 경로 명령 정보를 산출하여 상기 무인 비행체에 제공하는 트래킹 서버(300);를 포함하고,
상기 무인 비행체(200)는,
상기 경로 명령 정보에 따라 상기 트래킹 라인(100)을 이동하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 제1항에 있어서,
상기 휴대단말(400)은,
상기 트래킹 인터페이스를 사용자에게 표시하며, 상기 트래킹 인터페이스는 화물 수령 및 화물 운송에 관련된 정보, 무인비행체(200) 및 무인 드론(500)의 위치정보가 포함된 인터페이스인 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 제1항에 있어서,
상기 트래킹 라인(100)은,
접착제를 통해 상기 천장과 탈부착되는 테이핑 라인(110);
상기 테이핑 라인(110)에 형성된 복수 개의 경로들을 구분짖기 위하여 상기 테이핑 라인(110) 내에 형성된 복수 개의 표지부들 각각에 위치하고, 내부에 각 표지부들을 상기 무인 비행체(200)가 인식하기 위한 고유 식별 번호(ID)가 부여된 RFID 태그가 내장된 태그 모듈(120)를 포함하고,
상기 복수 개의 표지부들은,
적어도 하나 이상의 종단점들 및 적어도 하나 이상의 분기점들로 구성된 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 제1항에 있어서,
상기 무인 비행체(200)는,
복수 개의 회전구동체(201) 및 방향조작부(202)를 구비한 몸체부(210);
상기 몸체부(210) 내에 구비되며, 상기 RFID 태그를 태깅하는 RFID 리더기(220);
상기 몸체부(210)의 상부에 높이방향으로 돌출되어 구비되며, 적외선을 이용하여 상기 테이핑 라인(110)을 인식하는 라인트레이싱 센싱부(230);
상기 몸체부(210)의 기울기 변화에 따라 상기 라인트레이싱 센싱부(230)의 기울기를 가변시켜, 상기 라인트레이싱 센싱부(230)가 천장에 수직되도록 조절하는 기울기 조절부(240);
9축 자이로센서, 가속도 센서 및 자자기 센서 중 적어도 하나 이상을 이용하여 비행이동에 따라 상기 몸체부(210)의 기울기 변화를 감지하는 기울기 센싱모듈(250);
상기 기울기 센싱모듈(250)과 상기 천장과의 이격거리를 일정하게 유지하기 위하여 상기 천장에 초음파 신호를 출력한 후, 반송된 반송파를 수신하는 초음파 거리센서모듈(260); 및
상기 트래킹 서버(300)로부터 제공되는 경로명령정보를 수신한 후, 상기 경로 정보에 따라 상기 방향조작부(202)를 제어하는 MCU(270)를 포함하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 제4항에 있어서,
상기 MCU(270)는,
트래킹 서버(300)로부터 전송된 경로명령정보 및 상기 트래킹 라인(100)에 형성된 복수 개의 표지부들 각각의 고유 ID를 저장하는 메모리(271); 및
상기 경로명령정보와 상기 RFID 리더기(220)로부터 태깅된 태그 정보가 동일할 경우, 상기 경로명령정보 내에 기록된 행동명령 코드에 따라 상기 방향조작부 및 상기 회전구동체(201)의 구동을 제어하는 경로 제어/처리부(272); 및
상기 경로명령정보와 상기 RFID 리더기(220)로부터 태깅된 태그 정보가 불일치 할 경우, 이상신호(Error)를 상기 트래킹 서버(300)로 제공하는 에러신호 생성부(273);를 포함하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 제1항에 있어서,
무인 드론(500)은,
몸체부(510);
상기 무인 비행체(200)의 위치정보를 상기 트래킹 서버로부터 수신하는 GPS 모듈(520);
바퀴를 이용하여 상기 몸체부(510)를 전, 후, 좌, 우로 이동시키도록 동력구동체가 구비된 이동부(530);
초음파를 이용하여 객체의 위치점들을 추출하는 객체 감지 모듈(540);
위치점들을 평면좌표로 변환한 후, 상기 평면좌표를 복수 개의 분할좌표영역들로 분할하여 상기 분활좌표영역 내에 상기 위치점들이 없는 영역을 추출하여, 주행좌표를 생성하는 주행좌표산출모듈(550);
상기 무인 비행체(200)의 위치정보 및 상기 주행좌표에 기반하여 상기 이동부(530)의 구동을 제어하는 구동제어부(560); 및
상기 몸체부(510)의 상부면에 구비된 화물 수용부(570);를 포함하고,
상기 구동제어부(550)는,
상기 객체 감지 모듈(560)에서 객체를 감지할 경우, 상기 이동부(530)의 구동을 제어하고, 이상신호를 상기 트래킹 서버(300)로 제공하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 제1항에 있어서,
상기 트래킹 서버(300)는,
상기 화물배송 요청신호 내에 포함된 배송지점까지, 상기 무인 비행체(200)가 상기 트래킹 라인(100)을 따라 이동하는데 필요한 경로명령정보를 생성한 후, 상기 무인 비행체(200)에 제공하며, 실시간으로 상기 무인 비행체(200)의 위치정보를 상기 무인 비행체(200)로부터 제공받아, 상기 무인 드론(500)에 제공하는 상기 관리자 서버(310); 및
상기 휴대단말(400) 및 상기 관리자 서버(310)와 연동하며, 상기 화물배송 요청신호를 수신하여 상기 관리자 서버(310)로 제공하며, 상기 관리자 서버(310)로부터 제공된 상기 무인 비행체(200)의 이동정보(이동예상시간, 이동구간 정보)를 상기 휴대단말로 제공하는 클라이언트 서버(320);를 포함하고,
상기 관리자 서버(310)는,
상기 무인 드론(500)으로부터 이상신호를 수신할 경우, 상기 무인 비행체(200)에 정지신호를 제공하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 제7항에 있어서,
상기 관리자 서버(310)는,
상기 화물배송 요청신호를 수신한 후, 화물이 구비된 무인 비행체(200)가 상기 화물배송 요청신호 내에 기록된 배송지점까지 경유 가능한 경로들을 생성하는 경로 탐색부(311);
상기 경로 탐색부(311)에서 제공한 경로들 중 최단거리 경로를 추출하는 경로 추출부(312); 및
상기 최단거리 내에 위치하는 연속되는 표지부들 간에 상기 무인 비행체(200)의 이동에 필요한 행동명령 코드가 기록된 경로명령정보를 생성하는 경로명령 생성부(313);
상기 무인 비행체(200)의 위치정보를 상기 무인 드론(500)에 제공하는 위치정보 제공부; 및
상기 무인드론으로부터 이상신호를 수신할 경우, 상기 무인 비행체로 이동정지신호를 제공하는 이동정지신호 제공부(314);를 포함하고,
상기 최단거리 경로는 분기점들을 경유 순서에 따라 순차적으로 배열한 분기점 정보가 포함되며, 상기 경로 탐색부(311)는 무인 비행체(200)로부터 전송된 이상신호를 제공받을 경우, 배송지점까지 경유가능한 경로들을 재탐색하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템.
- 청구항 제1항 내지 청구항 제9항 중 어느 하나의 항에 기재된 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템을 이용한 무인 운송 서비스 방법에 있어서,
사용자의 휴대단말(400)에서 트래킹 인터페이스를 이용하여 상기 사용자가 원하고자 하는 배송지점의 정보가 포함된 화물배송 요청신호를 트래킹 서버(300)로 제공하는 화물배송 요청단계(S110);
상기 트래킹 서버(300)에서 화물배송 요청신호에 상응하는 경로명령정보를 산출하여 상기 휴대단말(400) 및 화물이 구비된 무인 비행체(200)로 전송하는 경로명령정보 제공단계(S120);
상기 배송지점까지 상기 경로명령정보에 따라 상기 무인 비행체(200)가 트래킹 라인을 따라 이동하고, 이동하는 상기 무인 비행체(200)를 따라 무인 드론(500)이 화물을 배송하는 화물배송단계(S130);
휴대단말(400)에서 트래킹 인터페이스를 이용하여 무인 비행체(200) 및 무인 드론(500)의 위치정보를 요청하는 위치정보 요청단계(S140);
위치정보 요청신호를 수신하며, 트래킹 서버(300)의 클라이언트 서버(320)는 관리자 서버(310)로부터 무인 비행체(200) 및 무인 드론(500)의 위치정보를 제공받아, 상기 휴대단말(400)로 제공하는 위치정보 제공단계(S150); 및
상기 무인 비행체(200) 및 상기 무인 드론(500)이 상기 배송지점에 도착하면, 무인 비행체(200)에서 트래킹 서버로 도착신호를 제공하며, 상기 트래킹 서버(300)에서 휴대단말(400)로 배송완료 메시지를 제공하는 배송 완료 단계(S160)를 포함하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템을 이용한 무인 운송 서비스 방법.
- 제9항에 있어서,
상기 경로명령정보 제공단계(S120)는,
클라이언트 서버(320)에서 화물배송 요청신호를 수신하는 단계(S121)
수신된 정보를 관리자 서버(310)로 제공하는 단계(S122);
관리자 서버(310)에서 무인 비행체(200)가 위치한 지점부터 화물배송 요청신호 내의 배송지점까지의 무인 비행체가 트래킹 라인을 따라 경유되어야하는 최단경로를 추출하는 단계(S123);
상기 최단경로 내에 포함된 표지부점(배송지점 및 분기점)을 추출하는 단계(S124); 및
분기점 또는 배송지점 별로 무인 비행체를 이동시키기 위한 경로명령정보를 생성한 후, 휴대단말 및 무인 비행체로 제공하는 단계(S125)를 포함하는 것을 특징으로 하는 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템을 이용한 무인 운송 서비스 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140157284A KR101680051B1 (ko) | 2014-11-12 | 2014-11-12 | 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템 및 이를 이용한 무인 운송 서비스 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140157284A KR101680051B1 (ko) | 2014-11-12 | 2014-11-12 | 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템 및 이를 이용한 무인 운송 서비스 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160056671A true KR20160056671A (ko) | 2016-05-20 |
| KR101680051B1 KR101680051B1 (ko) | 2016-11-28 |
Family
ID=56103797
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140157284A Active KR101680051B1 (ko) | 2014-11-12 | 2014-11-12 | 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템 및 이를 이용한 무인 운송 서비스 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101680051B1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018038455A1 (ko) * | 2016-08-25 | 2018-03-01 | 박기현 | 물품 수납기능을 가진 드론 착륙장치 |
| KR20180109216A (ko) * | 2017-03-27 | 2018-10-08 | 한국전자통신연구원 | 무인 항공기를 이용한 물류 협업 배송 방법 및 장치 |
| KR20190070448A (ko) | 2017-12-13 | 2019-06-21 | 주식회사 베셀 | 무인 자동화 체결 장치 및 상기 무인 자동화 체결 장치를 포함하는 무인 비행체 택배 정밀 배송 시스템 |
| KR20190072944A (ko) * | 2017-12-18 | 2019-06-26 | 삼성전자주식회사 | 무인 비행체 및 그의 동작 방법, 그리고 상기 무인 비행체의 이동을 제어하기 위한 무인 운반체 |
| CN111724101A (zh) * | 2019-03-20 | 2020-09-29 | 本田技研工业株式会社 | 配送系统、配送方法和存储有程序的非暂时性计算机可读记录介质 |
| CN111776227A (zh) * | 2019-04-04 | 2020-10-16 | 杭州海存信息技术有限公司 | 利用无人机进行客舱服务的飞机机舱及其方法 |
| KR20210029518A (ko) * | 2019-09-06 | 2021-03-16 | 삼성전자주식회사 | 멀티 센서 기반의 무인 비행체 및 그 제어 방법 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101947057B1 (ko) | 2017-02-27 | 2019-02-13 | 서울대학교산학협력단 | 구동기 능력을 고려한 안전 비행 운송 시스템 및 실시간 경로 계획 방법 |
| KR102870992B1 (ko) * | 2021-12-16 | 2025-10-14 | 네이버 주식회사 | 로봇 친화형 건물, 로봇을 활용한 배송 방법 및 시스템 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20140254896A1 (en) | 2011-07-18 | 2014-09-11 | Tiger T G Zhou | Unmanned drone, robot system for delivering mail, goods, humanoid security, crisis negotiation, mobile payments, smart humanoid mailbox and wearable personal exoskeleton heavy load flying machine |
-
2014
- 2014-11-12 KR KR1020140157284A patent/KR101680051B1/ko active Active
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018038455A1 (ko) * | 2016-08-25 | 2018-03-01 | 박기현 | 물품 수납기능을 가진 드론 착륙장치 |
| KR20180109216A (ko) * | 2017-03-27 | 2018-10-08 | 한국전자통신연구원 | 무인 항공기를 이용한 물류 협업 배송 방법 및 장치 |
| KR20190070448A (ko) | 2017-12-13 | 2019-06-21 | 주식회사 베셀 | 무인 자동화 체결 장치 및 상기 무인 자동화 체결 장치를 포함하는 무인 비행체 택배 정밀 배송 시스템 |
| KR20190072944A (ko) * | 2017-12-18 | 2019-06-26 | 삼성전자주식회사 | 무인 비행체 및 그의 동작 방법, 그리고 상기 무인 비행체의 이동을 제어하기 위한 무인 운반체 |
| WO2019124894A1 (ko) * | 2017-12-18 | 2019-06-27 | 삼성전자 주식회사 | 무인 비행체 및 그의 동작 방법, 그리고 상기 무인 비행체의 이동을 제어하기 위한 무인 운반체 |
| US11720105B2 (en) | 2017-12-18 | 2023-08-08 | Samsung Electronics Co., Ltd. | Unmanned aerial vehicle and method for operating same, and automated guided vehicle for controlling movement of unmanned aerial vehicle |
| CN111724101A (zh) * | 2019-03-20 | 2020-09-29 | 本田技研工业株式会社 | 配送系统、配送方法和存储有程序的非暂时性计算机可读记录介质 |
| CN111776227A (zh) * | 2019-04-04 | 2020-10-16 | 杭州海存信息技术有限公司 | 利用无人机进行客舱服务的飞机机舱及其方法 |
| KR20210029518A (ko) * | 2019-09-06 | 2021-03-16 | 삼성전자주식회사 | 멀티 센서 기반의 무인 비행체 및 그 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101680051B1 (ko) | 2016-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101680051B1 (ko) | 무인 드론 연동형 라인트레이싱 기반의 무인 비행체를 이용한 무인 운송 시스템 및 이를 이용한 무인 운송 서비스 방법 | |
| US9533759B2 (en) | Modular drone and methods for use | |
| US10403156B2 (en) | Automated package delivery to a delivery receptacle | |
| US9922306B1 (en) | Mobile RFID reading systems | |
| US9613338B1 (en) | Reading station structures | |
| ES2545131T3 (es) | Equipo y método para energizar una etiqueta transceptora | |
| US20180033315A1 (en) | Systems and methods for transporting products via unmanned aerial vehicles and mobile relay stations | |
| US10997544B1 (en) | Delivery location identifiers | |
| KR101831908B1 (ko) | 운송차량을 이용한 실시간 화물 위치 추적 시스템 | |
| US10748106B2 (en) | Mobile delivery receptacle | |
| US20140304107A1 (en) | Webrooming with rfid-scanning robots | |
| US9780435B2 (en) | Aerial inventory antenna | |
| US9881277B2 (en) | Wrist band haptic feedback system | |
| CA3128210C (en) | Proximate robot object detection and avoidance | |
| CN207281586U (zh) | 一种移动机器人导航控制系统 | |
| KR101682509B1 (ko) | 천장형 라인트레이싱 기반 무인 운송 시스템 및 이를 이용한 무인 운송 서비스 방법 | |
| Đurić et al. | Improving the efficiency of the warehouse storage process with the use of drones | |
| US12232075B2 (en) | System and method for automated and dynamic location tracking | |
| US20240288864A1 (en) | Method and System for Drone Localization and Planning | |
| Mathuria | Ultra-wideband RFID based localization, obstacle detection and speed optimization for automatic guided vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R15-X000 | Change to inventor requested |
St.27 status event code: A-3-3-R10-R15-oth-X000 |
|
| R16-X000 | Change to inventor recorded |
St.27 status event code: A-3-3-R10-R16-oth-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| FPAY | Annual fee payment |
Payment date: 20190923 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| P14-X000 | Amendment of ip right document requested |
St.27 status event code: A-5-5-P10-P14-nap-X000 |
|
| P16-X000 | Ip right document amended |
St.27 status event code: A-5-5-P10-P16-nap-X000 |
|
| Q16-X000 | A copy of ip right certificate issued |
St.27 status event code: A-4-4-Q10-Q16-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |