KR20170109438A - 착용형 로봇의 제어를 위한 zmp 기반 보행궤적 생성 방법 및 보행 궤적 생성 시스템의 제어 방법 - Google Patents
착용형 로봇의 제어를 위한 zmp 기반 보행궤적 생성 방법 및 보행 궤적 생성 시스템의 제어 방법 Download PDFInfo
- Publication number
- KR20170109438A KR20170109438A KR1020160033574A KR20160033574A KR20170109438A KR 20170109438 A KR20170109438 A KR 20170109438A KR 1020160033574 A KR1020160033574 A KR 1020160033574A KR 20160033574 A KR20160033574 A KR 20160033574A KR 20170109438 A KR20170109438 A KR 20170109438A
- Authority
- KR
- South Korea
- Prior art keywords
- wearable robot
- wearer
- zmp
- joint
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1661—Program controls characterised by programming, planning systems for manipulators characterised by task planning, object-oriented languages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1687—Assembly, peg and hole, palletising, straight line, weaving pattern movement
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Rehabilitation Tools (AREA)
- Manipulator (AREA)
Abstract
Description
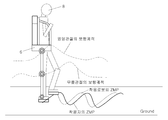
도 2는 본 발명에 따른 ZMP 기반의 보행궤적 생성 개략도.

4 : 외골격다리
6 : 보행바디
8 : 착용자
10 : 착용자 상체 운동 센서
12 : 착용자 하체 운동 센서
14 : 착용형 로봇 운동 센서
16 : 엉덩 구동기
18 : 엉덩 관절각 롤센서
20 : 엉덩 관절각 피치센서
22 : 엉덩 힘센서
24 : 무릎 구동기
26 : 무릎 관절각 피치센서
28 : 무릎 힘센서
30 : 발목 관절각 센서
32 : GRF 센서
34 : 등짐
Claims (12)
- 착용형 로봇을 장착한 착용자의 보행궤적 생성 시스템에 있어서,
착용자의 하지와 대응되는 각 관절에 피치방향 운동을 위한 구동력을 제공하여 착용자의 보행을 보조하는 한 쌍의 외골격다리와 상기 외골격다리 상측에 결합되는 보행바디를 포함하는 착용형 로봇;
상기 착용자의 상체와 하체에 각각 부착되어 착용자의 운동 상태를 측정하는 착용자 운동 센서;
상기 보행바디에 부착되어 상기 보행바디의 운동 상태를 측정하는 착용형 로봇 운동 센서;
상기 착용형 로봇의 엉덩 관절 부분에 장착되는 엉덩 구동기;
상기 착용형 로봇의 무릎 관절 부분에 장착되는 무릎 구동기;
상기 착용형 로봇의 발목 관절 부분에 장착되는 발목 관절각 센서;
상기 착용형 로봇의 양 쪽 발바닥 부분에 장착되어 지면의 반발력을 측정하는 GRF 센서;
를 포함하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 시스템. - 제1항에 있어서,
상기 착용형 로봇의 엉덩 관절 부분에는,
상기 착용형 로봇 엉덩 관절 부분의 피치방향 관절각을 측정하는 엉덩 관절각 피치센서와
상기 착용형 로봇 엉덩 관절 부분의 관절 토크를 측정하는 엉덩 힘센서가 장착되는 것
을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 시스템. - 제2항에 있어서,
상기 보행바디에는 상기 착용형 로봇 엉덩 관절 부분의 롤방향 관절각을 측정하는 엉덩 관절각 롤센서가 장착되는 것을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 시스템. - 제1항에 있어서,
상기 착용형 로봇의 무릎 관절 부분에는,
상기 착용형 로봇 무릎 관절 부분의 피치방향 관절각을 측정하는 무릎 관절각 피치센서와
상기 착용형 로봇 무릎 관절 부분의 관절 토크를 측정하는 무릎 힘센서가 장착되는 것
을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 시스템. - 제1항 내지 제4항 중 어느 한 항의 보행궤적 생성 시스템을 이용한 보행궤적 생성 방법에 있어서,
착용형 로봇과 상기 착용형 로봇을 착용한 착용자에 장착된 센서에서 상기 착용형 로봇의 ZMP(Zero Moment Point)와 상기 착용자의 ZMP(Zero Moment Point)를 측정하고,
상기 착용형 로봇의 ZMP와 상기 착용자의 ZMP 사이의 거리가 항상 일정하게 유지되도록 상기 착용형 로봇의 보행궤적을 생성하는 것을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 방법. - 제5항에 있어서,
상기 착용형 로봇의 ZMP와 상기 착용자의 ZMP 사이의 거리가 항상 일정하게 유지되기 위해서는 다음 식,

(여기서,은 착용형 로봇의 ZMP이고, 는 착용자의 ZMP이며,
는 착용자의 ZMP이며, 는 상수임.)
는 상수임.)
을 충족시키는 것을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 방법. - 제6항에 있어서,
상기 착용형 로봇의 ZMP와 상기 착용자의 ZMP 사이의 거리가 항상 일정하게 유지되도록 생성되는 보행궤적은 구동기가 장착되는 엉덩 관절과 무릎 관절에 대해 수행되는 것을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 방법. - 제7항에 있어서,
상기 구동기가 장착된 관절의 굽힘 정도를 조절하여 상기 착용형 로봇의 ZMP를 조절하는 것을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 방법. - 제8항에 있어서,
상기 구동기가 장착된 관절의 굽힘 정도를 반영하여 생성되는 상기 착용형 로봇의 보행궤적은 다음 식,

(여기서,, ,
, )
)
에 의해 산출되는 것을 특징으로 하는 착용형 로봇의 제어를 위한 ZMP 기반 보행궤적 생성 방법. - 제1항 내지 제4항 중 어느 한 항의 보행궤적 생성 시스템의 제어 방법에 있어서,
착용형 로봇의 ZMP와 착용자의 ZMP가 지지다각형 영역 내에 있는지 판단하여 상기 착용자의 자세 안정성을 판별하는 것을 특징으로 하는 보행궤적 생성 시스템 제어 방법. - 제10항에 있어서,
상기 착용형 로봇의 ZMP와 상기 착용자의 ZMP가 지지다각형 영역 내에 위치한다고 판단되면 상기 착용자의 자세가 안정하다고 판단하는 것을 특징으로 하는 보행궤적 생성 시스템 제어 방법. - 제10항에 있어서,
상기 착용형 로봇의 ZMP와 상기 착용자의 ZMP가 지지다각형 영역 내에 있지 않다고 판단되면 상기 착용형 로봇의 보행궤적을 수정하는 것을 특징으로 하는 보행궤적 생성 시스템 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160033574A KR101787879B1 (ko) | 2016-03-21 | 2016-03-21 | 착용형 로봇의 제어를 위한 zmp 기반 보행궤적 생성 방법 및 보행 궤적 생성 시스템의 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160033574A KR101787879B1 (ko) | 2016-03-21 | 2016-03-21 | 착용형 로봇의 제어를 위한 zmp 기반 보행궤적 생성 방법 및 보행 궤적 생성 시스템의 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170109438A true KR20170109438A (ko) | 2017-09-29 |
| KR101787879B1 KR101787879B1 (ko) | 2017-10-19 |
Family
ID=60035541
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160033574A Expired - Fee Related KR101787879B1 (ko) | 2016-03-21 | 2016-03-21 | 착용형 로봇의 제어를 위한 zmp 기반 보행궤적 생성 방법 및 보행 궤적 생성 시스템의 제어 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101787879B1 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109662869A (zh) * | 2019-01-21 | 2019-04-23 | 中国科学院沈阳自动化研究所 | 一种穿戴式柔性下肢助力机器人 |
| CN112720462A (zh) * | 2020-12-09 | 2021-04-30 | 深圳先进技术研究院 | 一种机器人的轨迹规划系统和方法 |
| CN118269055A (zh) * | 2024-03-15 | 2024-07-02 | 中国科学院深圳先进技术研究院 | 一种人体助力装置及附件运动测试平台及操作方法 |
| WO2025189468A1 (zh) * | 2024-03-15 | 2025-09-18 | 中国科学院深圳先进技术研究院 | 一种人体助力装置及附件运动测试平台及操作方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102291057B1 (ko) | 2020-03-27 | 2021-08-18 | 중앙대학교 산학협력단 | 의복형 웨어러블 로봇의 맞춤형 앵커링 포인트 결정 방법 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101342009B1 (ko) * | 2011-12-23 | 2013-12-16 | 대한민국 | 능동형 보행보조 및 기립보조기, 및 능동 보행보조 및 기립보조방법 |
| KR101490885B1 (ko) * | 2013-12-18 | 2015-02-06 | 국방과학연구소 | 보행의도 추정기반 착용로봇 및 그 제어방법 |
-
2016
- 2016-03-21 KR KR1020160033574A patent/KR101787879B1/ko not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109662869A (zh) * | 2019-01-21 | 2019-04-23 | 中国科学院沈阳自动化研究所 | 一种穿戴式柔性下肢助力机器人 |
| CN109662869B (zh) * | 2019-01-21 | 2024-02-02 | 中国科学院沈阳自动化研究所 | 一种穿戴式柔性下肢助力机器人 |
| CN112720462A (zh) * | 2020-12-09 | 2021-04-30 | 深圳先进技术研究院 | 一种机器人的轨迹规划系统和方法 |
| CN112720462B (zh) * | 2020-12-09 | 2021-08-27 | 深圳先进技术研究院 | 一种机器人的轨迹规划系统和方法 |
| CN118269055A (zh) * | 2024-03-15 | 2024-07-02 | 中国科学院深圳先进技术研究院 | 一种人体助力装置及附件运动测试平台及操作方法 |
| WO2025189468A1 (zh) * | 2024-03-15 | 2025-09-18 | 中国科学院深圳先进技术研究院 | 一种人体助力装置及附件运动测试平台及操作方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101787879B1 (ko) | 2017-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Zanotto et al. | Improving transparency of powered exoskeletons using force/torque sensors on the supporting cuffs | |
| Andrade et al. | Development of a “transparent operation mode” for a lower-limb exoskeleton designed for children with cerebral palsy | |
| Kazerooni et al. | Hybrid control of the Berkeley lower extremity exoskeleton (BLEEX) | |
| KR100904937B1 (ko) | 장착식 동작 보조장치 | |
| KR101490885B1 (ko) | 보행의도 추정기반 착용로봇 및 그 제어방법 | |
| EP3549558B1 (en) | Powered joint orthosis | |
| US9980842B2 (en) | Motion assist device and motion assist method, computer program, and program recording medium | |
| KR101787879B1 (ko) | 착용형 로봇의 제어를 위한 zmp 기반 보행궤적 생성 방법 및 보행 궤적 생성 시스템의 제어 방법 | |
| KR101878038B1 (ko) | 부목형 보행 보조 로봇 시스템 및 그 제어 방법 | |
| KR101681286B1 (ko) | 착용형 외골격 로봇의 고속 보행 자세 제어 장치 | |
| KR102073001B1 (ko) | 착용형 로봇 및 그 제어 방법 | |
| KR102146363B1 (ko) | 착용형 로봇 및 그 제어 방법 | |
| Wang et al. | Design and experimental verification of a hip exoskeleton based on human–machine dynamics for walking assistance | |
| Li et al. | Mechanical compliance and dynamic load isolation design of lower limb exoskeleton for locomotion assistance | |
| KR101321791B1 (ko) | 능동형 신체 재활을 위한 로봇 동작 제어 시스템 및 제어 방법 | |
| Andrade et al. | Trajectory tracking impedance controller in 6-DoF lower-limb exoskeleton for over-ground walking training: Preliminary results | |
| KR20170001261A (ko) | 착용로봇의 보행천이 제어방법 | |
| US9802315B2 (en) | Controller for mobile robot | |
| Nie et al. | Design of wearable robotic support limbs for walking assistance based on configurable support polygon | |
| JP2013208292A (ja) | 歩行支援装置、及び歩行支援プログラム | |
| JP2013208291A (ja) | 歩行支援装置、及び歩行支援プログラム | |
| KR20090036177A (ko) | 어깨 관절 3자유도 구현을 위한 착용형 로봇 메커니즘 | |
| Chen et al. | An assist-as-needed variable admittance controller for adaptive support of mobile walking assistive robots | |
| Li et al. | Design of a crutch-exoskeleton assisted gait for reducing upper extremity loads✰ | |
| Zhu et al. | Adding compliant joints and segmented foot to bio-inspired below-knee exoskeleton |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| FPAY | Annual fee payment |
Payment date: 20201006 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20211005 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20221005 Year of fee payment: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20241013 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| H13 | Ip right lapsed |
Free format text: ST27 STATUS EVENT CODE: N-4-6-H10-H13-OTH-PC1903 (AS PROVIDED BY THE NATIONAL OFFICE); TERMINATION CATEGORY : DEFAULT_OF_REGISTRATION_FEE Effective date: 20241013 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20241013 |