KR20190143545A - 모듈형 이동 로봇 - Google Patents
모듈형 이동 로봇 Download PDFInfo
- Publication number
- KR20190143545A KR20190143545A KR1020180068252A KR20180068252A KR20190143545A KR 20190143545 A KR20190143545 A KR 20190143545A KR 1020180068252 A KR1020180068252 A KR 1020180068252A KR 20180068252 A KR20180068252 A KR 20180068252A KR 20190143545 A KR20190143545 A KR 20190143545A
- Authority
- KR
- South Korea
- Prior art keywords
- display unit
- module
- mobile robot
- modular mobile
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0005—Manipulators having means for high-level communication with users, e.g. speech generator, face recognition means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/08—Program-controlled manipulators characterised by modular constructions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Program-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
- B25J9/1666—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F21/00—Security arrangements for protecting computers, components thereof, programs or data against unauthorised activity
- G06F21/30—Authentication, i.e. establishing the identity or authorisation of security principals
- G06F21/31—User authentication
- G06F21/34—User authentication involving the use of external additional devices, e.g. dongles or smart cards
- G06F21/35—User authentication involving the use of external additional devices, e.g. dongles or smart cards communicating wirelessly
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/10009—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation sensing by radiation using wavelengths larger than 0.1 mm, e.g. radio-waves or microwaves
- G06K7/10366—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation sensing by radiation using wavelengths larger than 0.1 mm, e.g. radio-waves or microwaves the interrogation device being adapted for miscellaneous applications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/14—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation using light without selection of wavelength, e.g. sensing reflected white light
- G06K7/1404—Methods for optical code recognition
- G06K7/1408—Methods for optical code recognition the method being specifically adapted for the type of code
- G06K7/1413—1D bar codes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K7/00—Methods or arrangements for sensing record carriers, e.g. for reading patterns
- G06K7/10—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation
- G06K7/14—Methods or arrangements for sensing record carriers, e.g. for reading patterns by electromagnetic radiation, e.g. optical sensing; by corpuscular radiation using light without selection of wavelength, e.g. sensing reflected white light
- G06K7/1404—Methods for optical code recognition
- G06K7/1408—Methods for optical code recognition the method being specifically adapted for the type of code
- G06K7/1417—2D bar codes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Electromagnetism (AREA)
- Toxicology (AREA)
- General Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Computer Security & Cryptography (AREA)
- Radar, Positioning & Navigation (AREA)
- Automation & Control Theory (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Aviation & Aerospace Engineering (AREA)
- Computer Hardware Design (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Manipulator (AREA)
Abstract
Description
도 2는 도 1의 모듈형 이동 로봇의 정면도이다.
도 3은 도 1의 모듈형 이동 로봇의 측면도이다.
도 4는 도 1의 모듈형 이동 로봇의 배면도이다.
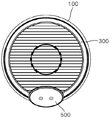
도 5는 도 1의 모듈형 이동 로봇의 평면도이다.
도 6은 도 1의 모듈형 이동 로봇의 분해사시도이다.
도 7은 도 1의 모듈형 이동 로봇의 제어 흐름을 설명하는 개략도이다.
도 8은 도 1의 모듈형 이동 로봇에 포터 모듈이 결합된 모습을 설명하는 사시도이다.
도 9는 도 1의 모듈형 이동 로봇에 서빙 모듈이 결합된 모습을 설명하는 사시도이다.
도 10은 도 1의 모듈형 이동 로봇에 쇼핑 모듈이 결합된 모습을 설명하는 사시도이다.
도 11은 본 발명의 다른 실시예에 따른 모듈형 이동 로봇을 설명하는 사시도이다.
120: 발광 유닛 200: 주행 유닛
300: 모듈 결합 플레이트 400: 바디 디스플레이 유닛
500: 헤드 디스플레이 유닛 510: 연결부
550: 제어 유닛
Claims (18)
- 본체;
상기 본체의 하단에 장착되어 상기 본체의 이동을 가능하게 하는 주행 유닛;
상기 본체의 상단에 장착되고, 상면에 결합되는 모듈을 감지하는 모듈 결합 플레이트;
상기 모듈 결합 플레이트의 일단에서 세로 방향으로 연장되도록 형성된 바디 디스플레이 유닛;
상기 바디 디스플레이 유닛의 상단에 회전 가능하게 장착된 헤드 디스플레이 유닛; 및
상기 모듈 결합 플레이트로부터 상기 감지된 모듈에 관한 정보를 제공받고, 상기 제공받은 정보를 토대로 상기 바디 디스플레이 유닛과 상기 헤드 디스플레이 유닛 중 적어도 하나를 제어하는 제어 유닛을 포함하는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 모듈 결합 플레이트와 상기 본체 사이에 장착되어 상기 본체의 외부에 배치된 장애물을 감지하는 깊이 센서; 및
상기 모듈 결합 플레이트와 상기 본체 사이에 장착되어 후방으로 빛을 발산하는 발광 유닛을 더 포함하는
모듈형 이동 로봇.
- 제2항에 있어서,
상기 모듈 결합 플레이트와 상기 본체 사이에는 전방 및 양측방으로 개구된 제1 개구부와 후방으로 개구된 제2 개구부가 형성된
모듈형 이동 로봇.
- 제3항에 있어서,
상기 깊이 센서는 상기 제1 개구부를 통해 상기 장애물을 감지하고,
상기 발광 유닛은 상기 제2 개구부를 통해 빛을 발산하는
모듈형 이동 로봇.
- 제2항에 있어서,
상기 제어 유닛은 상기 깊이 센서로부터 상기 감지된 장애물에 관한 정보를 제공받고, 상기 제공받은 정보를 토대로 상기 주행 유닛 및 상기 발광 유닛 중 적어도 하나를 제어하는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 모듈 결합 플레이트는 상기 바디 디스플레이 유닛과 일체형으로 형성되는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 바디 디스플레이 유닛에는 사용자 인증부가 구비되고,
상기 사용자 인증부를 통해 인증된 사용자에 관한 정보는 상기 사용자 인증부에서 상기 제어 유닛으로 제공되고,
상기 제어 유닛은 상기 사용자 인증부로부터 제공받은 상기 인증된 사용자에 관한 정보를 토대로 상기 바디 디스플레이 유닛에 표시되는 정보 및 상기 주행 유닛의 구동 중 적어도 하나를 제어하는
모듈형 이동 로봇.
- 제7항에 있어서,
상기 사용자 인증부에는 바코드(barcode), QR 코드(Quick Response code), RFID(Radio Frequency Identification) 및 블루투스(Bluetooth) 중 적어도 하나가 적용되는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 바디 디스플레이 유닛에는 사용자로부터 입력을 제공받기 위한 터치 스크린이 구비되고,
상기 터치 스크린은 상기 사용자로부터 제공받은 입력을 상기 제어 유닛으로 제공하고,
상기 제어 유닛은 상기 터치 스크린으로부터 제공받은 상기 입력을 토대로 상기 주행 유닛, 상기 바디 디스플레이 유닛 및 상기 헤드 디스플레이 유닛 중 적어도 하나를 제어하는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 제어 유닛은,
상기 본체에 내장되고,
상기 바디 디스플레이 유닛 및 상기 헤드 디스플레이 유닛에 각각 표시되는 정보와, 상기 헤드 디스플레이 유닛의 회전 여부와, 상기 주행 유닛의 구동을 제어하는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 바디 디스플레이 유닛의 후면에는 상기 세로 방향으로 연장되도록 형성된 제1 결합 고정부가 구비되고,
상기 모듈 결합 플레이트의 상면 가장자리에는 상방으로 돌출되도록 형성된 제2 결합 고정부가 구비되는
모듈형 이동 로봇.
- 제11항에 있어서,
상기 모듈은,
상기 바디 디스플레이 유닛의 양 측면을 덮도록 상기 모듈 결합 플레이트의 상면에 결합되고,
상기 제1 결합 고정부에 의해 상기 바디 디스플레이 유닛에 고정되며,
상기 제2 결합 고정부에 의해 상기 모듈 결합 플레이트에 고정되는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 주행 유닛은,
복수개의 주행 휠과,
상기 복수개의 주행 휠을 각각 독립적으로 구동하는 복수개의 구동 모터를 포함하는
모듈형 이동 로봇.
- 제13항에 있어서,
상기 제어 유닛은 상기 복수개의 구동 모터를 제어하는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 헤드 디스플레이 유닛과 상기 바디 디스플레이 유닛 사이를 연결하는 연결부를 더 포함하되,
상기 연결부의 일단은 상기 헤드 디스플레이 유닛에 고정 결합되고,
상기 연결부의 타단은 상기 바디 디스플레이 유닛에 회전 가능하게 결합되는
모듈형 이동 로봇.
- 제15항에 있어서,
상기 연결부의 일단은 상기 헤드 디스플레이 유닛의 후면에 관통 결합되고,
상기 연결부의 타단은 상기 바디 디스플레이 유닛의 상면에 관통 결합되는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 모듈은 상기 모듈 결합 플레이트의 상면에 탈부착 가능하게 결합되는
모듈형 이동 로봇.
- 제1항에 있어서,
상기 모듈은 쇼핑 모듈, 포터 모듈 및 서빙 모듈 중 적어도 하나를 포함하는
모듈형 이동 로봇.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180068252A KR102566528B1 (ko) | 2018-06-14 | 2018-06-14 | 모듈형 이동 로봇 |
| PCT/KR2019/005984 WO2019240389A1 (en) | 2018-06-14 | 2019-05-20 | Modular movable robot |
| EP19798145.9A EP3609657B1 (en) | 2018-06-14 | 2019-05-20 | Modular movable robot |
| US16/641,087 US11465292B2 (en) | 2018-06-14 | 2019-05-20 | Modular movable robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180068252A KR102566528B1 (ko) | 2018-06-14 | 2018-06-14 | 모듈형 이동 로봇 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190143545A true KR20190143545A (ko) | 2019-12-31 |
| KR102566528B1 KR102566528B1 (ko) | 2023-08-10 |
Family
ID=68843433
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180068252A Active KR102566528B1 (ko) | 2018-06-14 | 2018-06-14 | 모듈형 이동 로봇 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11465292B2 (ko) |
| EP (1) | EP3609657B1 (ko) |
| KR (1) | KR102566528B1 (ko) |
| WO (1) | WO2019240389A1 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021194192A1 (ko) * | 2020-03-25 | 2021-09-30 | 주식회사 우아한형제들 | 기능확장이 용이한 이동로봇 및 그 제공방법 |
| KR20210119886A (ko) * | 2020-03-25 | 2021-10-06 | 주식회사 우아한형제들 | 기능확장이 용이한 이동로봇 및 그 제공방법 |
| KR20210119709A (ko) | 2020-03-25 | 2021-10-06 | 한국과학기술연구원 | 모듈형 로봇 제어 시스템 |
| WO2021201481A1 (ko) * | 2020-03-31 | 2021-10-07 | 주식회사 우아한형제들 | 배달 로봇의 적재함 변환 시스템 |
| KR20240057499A (ko) * | 2022-10-24 | 2024-05-03 | (주) 한호기술 | 서비스모듈 교체형 자율주행 로봇 |
| KR20250083698A (ko) * | 2023-12-01 | 2025-06-10 | 주식회사 트위니 | 하나의 태스크를 공유하는 복수의 로봇을 제어하는 시스템의 태스크 수행 방법 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102137190B1 (ko) * | 2018-06-15 | 2020-07-24 | 엘지전자 주식회사 | 안내 로봇 |
| JP7415793B2 (ja) * | 2020-05-19 | 2024-01-17 | オムロン株式会社 | 無人搬送車 |
| CN113084834A (zh) * | 2021-04-10 | 2021-07-09 | 快住智能科技(苏州)有限公司 | 一种智能酒店业务机器人 |
| CN114571476A (zh) * | 2022-03-10 | 2022-06-03 | 苏州蓝甲虫机器人科技有限公司 | 一种基于计算机智能控制的家庭机器人 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110004015A (ko) * | 2009-07-07 | 2011-01-13 | 송세경 | 식당의 고객 서비스 및 계산 가능한 지능형 주행로봇 |
| KR101257896B1 (ko) * | 2011-05-25 | 2013-04-24 | (주) 퓨처로봇 | 스마트 서비스 로봇 운영 시스템 및 방법 |
| KR20130044859A (ko) * | 2011-10-25 | 2013-05-03 | 주식회사 엔티리서치 | 자율주행 이동로봇의 주행제어방법 |
| JP2015518188A (ja) * | 2012-02-29 | 2015-06-25 | アイロボット コーポレイション | 可動式ロボット |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7720572B2 (en) * | 2005-09-30 | 2010-05-18 | Irobot Corporation | Companion robot for personal interaction |
| KR20110022130A (ko) * | 2009-08-27 | 2011-03-07 | 이리오넷 주식회사 | 유비쿼터스 개인 트레이닝 보조 로봇 |
| US9440356B2 (en) * | 2012-12-21 | 2016-09-13 | Crosswing Inc. | Customizable robotic system |
| US10482550B1 (en) * | 2013-03-27 | 2019-11-19 | Vecna Robotics, Inc. | Mobile robot for performing hospitality service(s) for guest(s) of a hospitatlity business |
| US9557740B2 (en) * | 2013-07-02 | 2017-01-31 | David Crawley | Autonomous mobile platform for service applications |
| US11348066B2 (en) * | 2013-07-25 | 2022-05-31 | IAM Robotics, LLC | System and method for piece picking or put-away with a mobile manipulation robot |
| US9796093B2 (en) * | 2014-10-24 | 2017-10-24 | Fellow, Inc. | Customer service robot and related systems and methods |
| US10518407B2 (en) | 2015-01-06 | 2019-12-31 | Discovery Robotics | Apparatus and methods for providing a reconfigurable robotic platform |
| DE102015216272A1 (de) | 2015-08-26 | 2017-03-02 | Airbus Operations Gmbh | Modularer Roboter-Bausatz, Schwarm modularisierter Roboter und Verfahren zum Erledigen von Aufgaben durch einen Schwarm modularisierter Roboter |
| US20170129099A1 (en) | 2015-11-10 | 2017-05-11 | M3N, Inc. | Multipurpose Robotic System |
| US10486313B2 (en) * | 2016-02-09 | 2019-11-26 | Cobalt Robotics Inc. | Mobile robot map generation |
| CN106041950B (zh) | 2016-06-24 | 2019-05-21 | 深圳市前海康启源科技有限公司 | 家用机器人控制系统及方法 |
| US10196210B2 (en) * | 2017-01-16 | 2019-02-05 | Locus Robotics Corp. | Display for improved efficiency in robot assisted order-fulfillment operations |
-
2018
- 2018-06-14 KR KR1020180068252A patent/KR102566528B1/ko active Active
-
2019
- 2019-05-20 EP EP19798145.9A patent/EP3609657B1/en active Active
- 2019-05-20 US US16/641,087 patent/US11465292B2/en active Active
- 2019-05-20 WO PCT/KR2019/005984 patent/WO2019240389A1/en not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110004015A (ko) * | 2009-07-07 | 2011-01-13 | 송세경 | 식당의 고객 서비스 및 계산 가능한 지능형 주행로봇 |
| KR101257896B1 (ko) * | 2011-05-25 | 2013-04-24 | (주) 퓨처로봇 | 스마트 서비스 로봇 운영 시스템 및 방법 |
| KR20130044859A (ko) * | 2011-10-25 | 2013-05-03 | 주식회사 엔티리서치 | 자율주행 이동로봇의 주행제어방법 |
| JP2015518188A (ja) * | 2012-02-29 | 2015-06-25 | アイロボット コーポレイション | 可動式ロボット |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021194192A1 (ko) * | 2020-03-25 | 2021-09-30 | 주식회사 우아한형제들 | 기능확장이 용이한 이동로봇 및 그 제공방법 |
| KR20210119886A (ko) * | 2020-03-25 | 2021-10-06 | 주식회사 우아한형제들 | 기능확장이 용이한 이동로봇 및 그 제공방법 |
| KR20210119709A (ko) | 2020-03-25 | 2021-10-06 | 한국과학기술연구원 | 모듈형 로봇 제어 시스템 |
| US11660744B2 (en) | 2020-03-25 | 2023-05-30 | Korea Institute Of Science And Technology | Module-type robot control system |
| WO2021201481A1 (ko) * | 2020-03-31 | 2021-10-07 | 주식회사 우아한형제들 | 배달 로봇의 적재함 변환 시스템 |
| CN115768603A (zh) * | 2020-03-31 | 2023-03-07 | 优雅兄弟有限公司 | 配送机器人的装载箱变换系统 |
| US12319522B2 (en) | 2020-03-31 | 2025-06-03 | Woowa Brothers Co., Ltd. | Loading box changing system for delivery robot |
| KR20240057499A (ko) * | 2022-10-24 | 2024-05-03 | (주) 한호기술 | 서비스모듈 교체형 자율주행 로봇 |
| KR20250083698A (ko) * | 2023-12-01 | 2025-06-10 | 주식회사 트위니 | 하나의 태스크를 공유하는 복수의 로봇을 제어하는 시스템의 태스크 수행 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3609657B1 (en) | 2022-01-05 |
| EP3609657A1 (en) | 2020-02-19 |
| EP3609657A4 (en) | 2021-03-03 |
| KR102566528B1 (ko) | 2023-08-10 |
| WO2019240389A1 (en) | 2019-12-19 |
| US20200254623A1 (en) | 2020-08-13 |
| US11465292B2 (en) | 2022-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20190143545A (ko) | 모듈형 이동 로봇 | |
| KR102560904B1 (ko) | 포터 모듈이 구비된 모듈형 이동 로봇 | |
| US11889933B2 (en) | Resolving events in item-identifying carts | |
| US11820414B1 (en) | Item-identifying carts | |
| US11540627B2 (en) | Serving module and robot having the same | |
| US11381780B2 (en) | Item-identifying carts | |
| KR102818558B1 (ko) | 로봇의 제어 방법 | |
| CN105159236B (zh) | 售卖机器人系统及其控制方法 | |
| US10239740B2 (en) | Shopping facility assistance system and method having a motorized transport unit that selectively leads or follows a user within a shopping facility | |
| KR102369205B1 (ko) | 전자 디스플레이들을 머천다이징하기 위한 시스템들 및 방법들 | |
| US20200198680A1 (en) | Physical shopping cart having features for use in customer checkout of items placed into the shopping cart | |
| KR20200133174A (ko) | 서빙로봇 | |
| US20240175625A1 (en) | Appliance door handles with integrated graphical displays | |
| KR20230137725A (ko) | 치과에서 사용하는 서빙 로봇 | |
| US12217457B1 (en) | Determining a location of a mobile cart | |
| US12084104B1 (en) | Capacitive sensor for item identifying mobile apparatus | |
| US20080275630A1 (en) | Venue Guiding Assistance System, Apparatus and Method | |
| JP7844376B2 (ja) | 接客ロボットおよびプログラム | |
| US20250178511A1 (en) | Square-shaped service serving robot with excellent service provision space utilization | |
| US12277590B1 (en) | Systems and method for generating recommendations based on location-based, item similarities | |
| US11673254B2 (en) | Porter module and robot having the same | |
| US12394194B1 (en) | Conserving power in item-identifying carts | |
| CN111148607A (zh) | 用于通过移动机器人进行物品递送的系统和方法 | |
| US20210157999A1 (en) | Shopping module and robot having the same | |
| KR101976815B1 (ko) | 스마트 카트 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20180614 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210601 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20180614 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20221104 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20230515 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20230808 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20230808 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |