KR20200039348A - 청소기 및 그것의 제어방법 - Google Patents
청소기 및 그것의 제어방법 Download PDFInfo
- Publication number
- KR20200039348A KR20200039348A KR1020180119165A KR20180119165A KR20200039348A KR 20200039348 A KR20200039348 A KR 20200039348A KR 1020180119165 A KR1020180119165 A KR 1020180119165A KR 20180119165 A KR20180119165 A KR 20180119165A KR 20200039348 A KR20200039348 A KR 20200039348A
- Authority
- KR
- South Korea
- Prior art keywords
- battery
- suction motor
- voltage
- switch
- battery assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images










Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2842—Suction motors or blowers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/2831—Motor parameters, e.g. motor load or speed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2868—Arrangements for power supply of vacuum cleaners or the accessories thereof
- A47L9/2878—Dual-powered vacuum cleaners, i.e. devices which can be operated with mains power supply or by batteries
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2868—Arrangements for power supply of vacuum cleaners or the accessories thereof
- A47L9/2884—Details of arrangements of batteries or their installation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/06—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current
- H02P7/18—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power
- H02P7/24—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices
- H02P7/28—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices
- H02P7/285—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only
- H02P7/29—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only using pulse modulation
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K7/00—Modulating pulses with a continuously-variable modulating signal
- H03K7/08—Duration or width modulation ; Duty cycle modulation
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Description
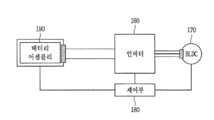
도 3a, 도 3b는 본 발명의 일 실시 예에 따른 진공 청소기에서, 배터리 전압 또는 커패시터에 충전된 전압을 이용하여 흡입 모터를 구동하는 구동회로를 보여주는 블록도와 회로도이다.
도 4a, 도 4b는 본 발명의 일 실시 예에 따른 진공 청소기에서, 배터리 분리시 인버터 소손 방지를 위한 제어방법을 구체적으로 설명하기 위한 흐름도들이다.
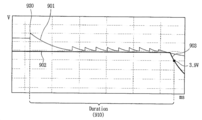
도 5는 기존의 진공 청소기에서 배터리 분리시 피크 전압의 발생을 보여주는 그래프이고, 도 6은 본 발명의 일 실시 예에 따른 진공 청소기에서 흡입 모터의 구동 중에 배터리 분리시 피크 전압의 발생 없이 흡입 모터의 구동이 중단되는 것을 보여주는 그래프이다.
도 7은 도 5와 관련된 PWM(pulse width modulation) 신호의 파형을 보여주는 그래프이고, 도 8은 도 6과 관련된 PWM 신호의 파형을 보여주는 그래프이다.
도 9a 및 도 9b는 본 발명의 일 실시 예에 따른 진공 청소기에서 흡입 모터의 구동 중에 배터리 분리시, 제어부에 전원의 인가가 유지되는 시간을 설명하기 위한 그래프들이다.
| 배터리 분리 상태 | 흡입 모터의 동작 상태 | 인버터의 상단 스위칭 소자 제어 | 인버터의 하단 스위칭 소자 제어 |
| 배터리 분리 감지 | 동작 중 | U, V, W 모두 Off | X, Y, Z PWM 제어 |
| - | 정지 | U, V, W 모두 Off | X, Y, Z 모두 On |
| - | 감속 구동 | U, V, W PWM 제어 | X, Y, Z PWM 제어 |
Claims (12)
- 흡입력을 발생시키는 흡입모터를 포함하는 본체;
상기 본체에 장착되어, 상기 흡입모터에 전압을 공급하는 배터리를 포함하는 배터리 어셈블리;
상기 배터리로부터 제공되는 공급 전압을 상기 흡입모터에 연결하는 스위치를 포함하는 인버터; 및
상기 흡입모터가 구동되는 동안 상기 배터리 어셈블리가 상기 본체로부터 분리된 것을 감지하고, 상기 감지에 따라 상기 스위치에 연결된 커패시터에 충전된 전압을 이용하여 상기 흡입 모터가 감속 구동 되도록 상기 스위치를 제어하기 위한 PWM 신호를 출력하는 제어부를 포함하여 이루어지는 진공 청소기. - 제1항에 있어서,
상기 제어부는,
상기 배터리 어셈블리의 분리에 따른 상기 공급 전압과 상기 흡입모터의 회전 속도의 변화에 대응하여 상기 PWM 신호의 듀티 사이클을 조절하는 것을 특징으로 하는 진공 청소기. - 제1항에 있어서,
상기 스위치는 상단 및 하단 스위칭 소자를 구비하고,
상기 제어부는,
상기 배터리 어셈블리가 상기 본체로부터 분리된 것이 감지되면, 상기 인버터의 상단 스위칭 소자는 오프시키고 하단 스위칭 소자는 상기 PWM 신호의 듀티 사이클을 감소시키는 제어신호를 출력하는 것을 특징으로 하는 진공 청소기. - 제3항에 있어서,
상기 제어부는,
상기 배터리 어셈블리가 상기 본체로부터 분리된 것이 감지되면, 상기 하단 스위칭 소자에 대한 PWM 신호의 듀티 사이클이 상기 공급 전압의 크기를 기준으로 1% 내외로 감소되도록 상기 스위치를 제어하는 것을 특징으로 하는 진공 청소기. - 제3항에 있어서,
상기 배터리 어셈블리가 상기 본체로부터 분리된 것이 감지되면, 상기 하단 스위칭 소자에 대한PWM 신호의 듀티 사이클이 상기 배터리 어셈블리의 분리 전보다 작은 양으로 조정되는 것을 특징으로 하는 진공 청소기. - 제1항에 있어서,
상기 흡입 모터의 감속 구동을 위한 상기 PWM 신호의 출력은 상기 커패시터에 충전된 전압이 방전될 때까지 수행되는 것을 특징으로 하는 진공 청소기. - 제6항에 있어서,
상기 스위치는, 상단 및 하단 스위칭 소자를 구비하고,
상기 제어부는,
상기 커패시터에 충전된 전압이 방전되면, 상기 스위치의 상단 스위칭 소자는 오프 상태로 상기 스위치의 하단 스위칭 소자는 온 상태로 제어하여 상기 흡입 모터의 구동을 정지시키는 것을 특징으로 하는 진공 청소기. - 제1항에 있어서,
상기 배터리 어셈블리가 상기 본체로부터 분리된 것이 감지된 후에도 일정 시간 동안 상기 제어부에 정격 전압이 인가되며,
상기 제어부는, 상기 정격 전압에 의해 상기 스위치를 제어하기 위한 PWM 신호를 출력하는 것을 특징으로 하는 진공 청소기. - 제1항에 있어서,
상기 공급 전압의 크기를 감지하는 전압 검출 수단과,
상기 흡입모터의 회전 속도를 감지하는 속도 검출 수단을 더 포함하고,
상기 제어부는,
상기 전압 검출 수단에 의해 감지된 공급 전압의 크기가 제1 기준값 이하이고 상기 속도 검출 수단에 의해 감지된 회전 속도가 제2 기준값 이상이면, 상기 배터리 어셈블리가 상기 본체로부터 분리된 것으로 감지하는 것을 특징으로 하는 진공 청소기. - 제9항에 있어서,
상기 제어부는,
상기 전압 검출 수단에 의해 감지된 공급 전압의 크기가 제1 기준값을 초과하거나 상기 속도 검출 수단에 의해 감지된 회전 속도가 제2 기준값 미만이면, 상기 배터리 어셈블리가 상기 본체로부터 분리되지 않은 것으로 판단하는 것을 특징으로 하는 진공 청소기. - 배터리로부터 제공되는 공급 전압을 이용하여 청소기 본체에 구비된 흡입모터를 구동하는 단계;
상기 흡입모터가 구동되는 동안 상기 본체에 장착된 배터리 어셈블리가 상기 본체로부터 분리된 것을 감지하는 단계;
상기 감지에 따라 커패시터에 충전된 전압을 이용하여 상기 흡입 모터가 감속 구동 되도록, 상기 공급 전압을 상기 흡입모터에 연결하는 스위치를 제어하기 위한 PWM 신호를 출력하는 단계를 포함하는 것을 특징으로 하는 진공 청소기의 제어방법. - 제11항에 있어서,
상기 PWM 신호를 출력하는 단계는
상기 스위치의 상단 스위칭 소자는 오프시키고 상기 스위치의 하단 스위칭 소자는 PWM 신호의 듀티 사이클을 감소시키는 제어신호를 출력하는 단계인 것을 특징으로 하는 진공 청소기의 제어방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180119165A KR20200039348A (ko) | 2018-10-05 | 2018-10-05 | 청소기 및 그것의 제어방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180119165A KR20200039348A (ko) | 2018-10-05 | 2018-10-05 | 청소기 및 그것의 제어방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200039348A true KR20200039348A (ko) | 2020-04-16 |
Family
ID=70454921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180119165A Abandoned KR20200039348A (ko) | 2018-10-05 | 2018-10-05 | 청소기 및 그것의 제어방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200039348A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021230446A1 (ko) * | 2020-05-12 | 2021-11-18 | 엘지전자 주식회사 | 전력선 통신이 제공되는 진공 청소기 |
| KR20230072034A (ko) | 2021-11-17 | 2023-05-24 | 공주대학교 산학협력단 | 청소 위치 파악 장치 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140095581A (ko) | 2009-04-30 | 2014-08-01 | 아크티에볼라겟트 에렉트로룩스 | 진공청소기와 전기모터를 제어하기 위한 방법 |
-
2018
- 2018-10-05 KR KR1020180119165A patent/KR20200039348A/ko not_active Abandoned
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140095581A (ko) | 2009-04-30 | 2014-08-01 | 아크티에볼라겟트 에렉트로룩스 | 진공청소기와 전기모터를 제어하기 위한 방법 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021230446A1 (ko) * | 2020-05-12 | 2021-11-18 | 엘지전자 주식회사 | 전력선 통신이 제공되는 진공 청소기 |
| KR20210138342A (ko) * | 2020-05-12 | 2021-11-19 | 엘지전자 주식회사 | 전력선 통신이 제공되는 진공 청소기 |
| KR20220054268A (ko) * | 2020-05-12 | 2022-05-02 | 엘지전자 주식회사 | 전력선 통신이 제공되는 진공 청소기 |
| CN115515463A (zh) * | 2020-05-12 | 2022-12-23 | Lg电子株式会社 | 提供有电力线通信的真空吸尘器 |
| AU2020447556B2 (en) * | 2020-05-12 | 2024-01-25 | Lg Electronics Inc. | Vacuum cleaner capable of power line communication |
| CN115515463B (zh) * | 2020-05-12 | 2024-03-01 | Lg电子株式会社 | 提供有电力线通信的真空吸尘器 |
| US12396607B2 (en) | 2020-05-12 | 2025-08-26 | Lg Electronics Inc. | Vacuum cleaner capable of power line communication |
| KR20230072034A (ko) | 2021-11-17 | 2023-05-24 | 공주대학교 산학협력단 | 청소 위치 파악 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101341234B1 (ko) | 청소기 및 그 구동 방법 | |
| US7932688B2 (en) | Cleaner and method for driving the same | |
| EP2103243A1 (en) | A low noise and energy saving air vacuum cleaner | |
| JP5817049B2 (ja) | オンボード診断を備えた空気移動電気器具 | |
| KR101350286B1 (ko) | 전기 기계용 전류 컨트롤러 | |
| US7847511B2 (en) | Cleaner and method for driving the same | |
| KR101479150B1 (ko) | 일정 파워 전기 시스템 | |
| KR101361020B1 (ko) | 전기 기계용 제어 시스템 | |
| EP2415164B1 (en) | Control of an electric machine | |
| EP2237407B1 (en) | Control system for an electric machine | |
| US7698777B2 (en) | Vacuum cleaner | |
| EP2237411A2 (en) | Power tuning an electric system | |
| KR20000011429A (ko) | 부드럽게시작되는청소기구및방법 | |
| EP2237410A2 (en) | Brushless DC motor with soft-starting of PWM signals | |
| KR20200039348A (ko) | 청소기 및 그것의 제어방법 | |
| US20180152122A1 (en) | Dc-brushless-motor control device | |
| EP4268695B1 (en) | Vacuum cleaner and method for controlling same | |
| JP4020746B2 (ja) | 電気掃除機 | |
| JP2007319581A (ja) | 電気掃除機の制御装置 | |
| JP2000069787A (ja) | 電気掃除機 | |
| JP2003174796A (ja) | モータ制御装置及びそれを用いた電気掃除機 | |
| JP2020179055A (ja) | 電気掃除機 | |
| CN111616644A (zh) | 电动吸尘器 | |
| JP2002218758A (ja) | 回転ブラシ駆動用モータ制御装置およびこれを用いた電気掃除機 | |
| JPH0584163B2 (ko) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PC1902 | Submission of document of abandonment before decision of registration |
St.27 status event code: N-1-6-B10-B11-nap-PC1902 |