KR20200044043A - 역행 드릴 의료 디바이스용 제어 시스템 - Google Patents
역행 드릴 의료 디바이스용 제어 시스템 Download PDFInfo
- Publication number
- KR20200044043A KR20200044043A KR1020207007957A KR20207007957A KR20200044043A KR 20200044043 A KR20200044043 A KR 20200044043A KR 1020207007957 A KR1020207007957 A KR 1020207007957A KR 20207007957 A KR20207007957 A KR 20207007957A KR 20200044043 A KR20200044043 A KR 20200044043A
- Authority
- KR
- South Korea
- Prior art keywords
- blade
- cam
- inner shaft
- longitudinal axis
- elongated body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005553 drilling Methods 0.000 claims description 28
- 210000000988 bone and bone Anatomy 0.000 claims description 23
- 238000000034 method Methods 0.000 claims description 18
- 230000007246 mechanism Effects 0.000 claims description 7
- 230000003213 activating effect Effects 0.000 claims description 4
- 238000013519 translation Methods 0.000 claims description 2
- 238000006073 displacement reaction Methods 0.000 claims 1
- 230000014759 maintenance of location Effects 0.000 abstract description 5
- 238000001356 surgical procedure Methods 0.000 abstract description 4
- 239000002131 composite material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000002266 amputation Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000013467 fragmentation Methods 0.000 description 1
- 238000006062 fragmentation reaction Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000002844 melting Methods 0.000 description 1
- 230000008018 melting Effects 0.000 description 1
- 238000002278 reconstructive surgery Methods 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
Images






























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1626—Control means; Display units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1615—Drill bits, i.e. rotating tools extending from a handpiece to contact the worked material
- A61B17/1617—Drill bits, i.e. rotating tools extending from a handpiece to contact the worked material with mobile or detachable parts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/162—Chucks or tool parts which are to be held in a chuck
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1622—Drill handpieces
- A61B17/1624—Drive mechanisms therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1631—Special drive shafts, e.g. flexible shafts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1662—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body
- A61B17/1675—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body for the knee
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Engineering & Computer Science (AREA)
- Dentistry (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
Description
도 2는 도 1의 의료 디바이스의 분해 사시도이다.
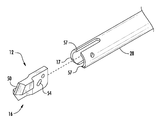
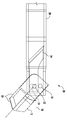
도 3은 도 2의 상세 3-3에서 취한 의료 디바이스의 원위 단부의 상세 사시도이다.
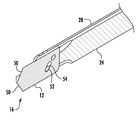
도 4는 도 1의 섹션 라인 4-4에서 취한 블레이드의 부분 단면 사시도이다.
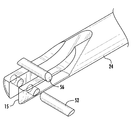
도 5는 내부 샤프트의 원위 단부의 부분 사시도이다.
도 6은 도 1의 섹션 라인 6-6에서 취한 의료 디바이스의 원위 단부의 부분 단면도이다.
도 7은 도 1의 섹션 라인 7-7에서 취한 의료 디바이스의 근위 단부의 부분 분해 상세 사시도이다.
도 8은 도 1의 섹션 라인 7-7에서 취한 의료 디바이스의 근위 단부의 상세 사시도이다.
도 9는 도 8의 섹션 라인 9-9에서 취한 의료 디바이스의 근위 단부의 단면 사시도이다.
도 10은 도 8의 섹션 라인 9-9에서 취한 의료 디바이스의 근위 단부의 측단면도이다.
도 11은 하우징이 제거되어 있는 상태에서 의료 디바이스의 근위 단부의 측면도이다.
도 12는 캠 종동자가 제거되어 있는 상태에서 의료 디바이스의 근위 단부의 분해 사시도이다.
도 13은 도 11의 섹션 라인 13-13에서 취한, 하우징이 제거되어 있는 상태에서 의료 디바이스의 근위 단부의 측단면도이다.
도 14는 의료 디바이스를 사용하는 방법의 흐름도이다.
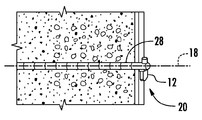
도 15는 블레이드가 제1 위치에 위치되어 있는 상태에서 환자의 뼈를 통해 드릴링된 외부 튜브 및 내부 샤프트의 측단면도이다.
도 16은 블레이드가 제2 플립된 위치에 위치되어 있는 상태에서 환자의 뼈를 통해 드릴링된 외부 튜브 및 내부 샤프트의 측단면도이다.
도 17은 블레이드가 제2 플립된 위치에 위치되어 있고 역행 소켓을 드릴링하는 데 사용되는 외부 튜브 및 내부 샤프트의 측단면도이다.
도 18은 제1 위치에서의 블레이드의 상세 측면도이다.
도 19는 제1 및 제2 위치 사이에서 이동하는 블레이드의 상세 측면도이다.
도 20은 제2 위치에서의 블레이드의 상세 측면도이다.
도 21은 제1 위치, 제2 위치에 있고 제1 및 제2 위치 사이에서 이동하는 블레이드의 상세 편집 측면도이다.
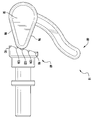
도 22는 제1 위치에서의 작동 디바이스를 도시하고 있는 디바이스의 근위 단부의 상세도이다.
도 23은 도 22의 상세도의 측단면도이다.
도 24는 작동 디바이스가 도 22 및 도 23에 도시되어 있는 제1 위치에 있고 캠이 캠 종동자 상의 제1 위치 리테이너와 접촉할 때 디바이스의 원위 단부의 상세 측면도이다.
도 25는 제2 위치에서의 작동 디바이스를 도시하고 있는 디바이스의 근위 단부의 상세도이다.
도 26은 도 25의 상세도의 측단면도이다.
도 27은 작동 디바이스가 도 25 및 도 26에 도시되어 있는 제2 위치에 있고 캠이 캠 종동자 상의 제2 위치 리테이너와 접촉할 때 디바이스의 원위 단부의 상세 측면도이다.
도 28은 캠이 캠 종동자 상의 제3 위치 리테이너와 접촉하고 작동 디바이스가 도 24 및 도 27에 도시되어 있는 제1 및 제2 위치 사이에 위치될 때 블레이드가 약 45도에 있는 디바이스의 원위 단부의 상세 측면도이다.
도 29는 디바이스의 원위 단부에서 블레이드가 약 45도에 있을 때 캠이 캠 종동자 상의 제3 위치 리테이너와 접촉하고 있는 상태에서 캠과 캠 종동자의 상세 측면도이다.
도 30은 제1, 제2, 제3, 제4 및 제5 위치 리테이너를 포함하는 캠 종동자의 다른 실시예의 사시도이다.
도 31은 제1, 제2, 제3, 제4 및 제5 위치 리테이너를 포함하는 도 29에 도시되어 있는 캠 종동자의 다른 실시예의 측면도이다.
도 32는 캠 종동자 상의 제4 위치 리테이너와 접촉하는 캠의 사시도이다.
도 33은 캠 종동자 상의 제4 위치 리테이너와 접촉하는 캠의 측면도이다.
도 34는 캠이 캠 종동자 상의 제4 위치 리테이너와 접촉하고 작동 디바이스가 제1 및 제3 위치 사이에 위치될 때 제4 위치에서 블레이드가 약 30도에 있는 상태에서 디바이스의 원위 단부의 상세 측면도이다.
도 35는 캠 종동자 상의 제5 위치 리테이너와 접촉하는 캠의 측면도이다.
도 36은 캠이 캠 종동자 상의 제5 위치 리테이너와 접촉하고 작동 디바이스가 제2 및 제3 위치 사이에 위치될 때 제5 위치에서 블레이드가 약 60도에 있는 상태에서 디바이스의 원위 단부의 상세 측면도이다.
Claims (24)
- 회전식 절단 디바이스로서,
원위 단부, 근위 단부 및 종축을 갖는 세장형 본체로서, 상기 세장형 본체는 외부 튜브 및 상기 외부 튜브에 의해 수용된 내부 샤프트를 더 포함하는 것인 세장형 본체;
상기 본체의 원위 단부에 있는 블레이드로서, 상기 블레이드는 상기 종축과 전반적으로 정렬된 제1 위치로부터 상기 종축과 비평행한 제2 플립 위치로 회전하도록 구성되는 것인 블레이드; 및
상기 블레이드를 상기 외부 튜브 및 내부 샤프트 양자 모두의 원위 단부에 연결하는 블레이드 위치 제어 시스템
을 포함하고, 상기 블레이드 위치 제어 시스템은:
상기 블레이드가, 상기 종축과 전반적으로 정렬된 제1 위치로부터 상기 종축과 비평행한 제2 플립 위치로 이동하게 하는 상기 내부 샤프트를 상기 블레이드에 연결하는 연결 시스템으로서, 상기 블레이드가 상기 제2 플립 위치에 잠금될 때 구멍의 역행 드릴링을 위해 상기 블레이드의 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되는 것인, 연결 시스템;
상기 블레이드를 제1 및 제2 위치로 이동시키기 위해 캠 종동자와 접하고 상기 내부 샤프트와 접하는 캠; 및
상기 캠을 제2 위치에 유지하여 상기 내부 샤프트가 상기 제2 위치에 유지되게 하여, 이에 의해 상기 내부 샤프트와 상기 블레이드를 회전하게 하면서 구멍의 역행 드릴링을 위해 상기 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되도록 상기 블레이드의 절단 모서리를 적소에 유지하도록 구성된 위치 유지 시스템을 포함하는 것인 회전식 절단 디바이스. - 제1항에 있어서, 상기 위치 유지 시스템은 상기 캠으로부터 연장되는 적어도 하나의 핀을 포함하는 것인 회전식 절단 디바이스.
- 제2항에 있어서, 상기 위치 유지 시스템은, 상기 적어도 하나의 핀이 상기 내부 샤프트의 적어도 하나의 홈에 존재하는 동안 상기 내부 샤프트가 회전 가능하여, 이에 의해 상기 내부 샤프트의 축방향 운동을 방지하도록 상기 캠으로부터 연장되는 적어도 하나의 핀을 수용하기 위한 적어도 하나의 홈을 상기 내부 샤프트 상에 포함하는 것인 회전식 절단 디바이스.
- 제3항에 있어서, 상기 위치 유지 시스템은 상기 내부 샤프트 상의 상기 핀, 상기 캠 및 상기 적어도 하나의 홈 사이의 잠재적인 오정렬을 처리하도록 상기 적어도 하나의 핀을 수용하기 위한 상기 캠 내의 적어도 하나의 슬롯을 포함하는 것인 회전식 절단 디바이스.
- 제1항에 있어서, 상기 캠은 그를 통해 연장되는 상기 내부 샤프트를 수용하도록 구성된 튜브 수용 챔버에 의해 분리된 제1 헤드 부재 및 제2 헤드 부재로부터 형성되는 것인 회전식 절단 디바이스.
- 제1항에 있어서, 상기 캠 종동자는, 제1 위치에 상기 캠을 유지하도록 구성되고 또한 상기 종축과 전반적으로 정렬된 위치에 상기 블레이드를 유지하는 제1 위치 리테이너, 및 구멍의 역행 드릴링을 위해 상기 내부 샤프트와 블레이드가 회전하게 하면서 상기 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되도록 상기 블레이드의 절단 모서리가 위치되어 있는 제2 위치에 상기 캠을 유지하도록 구성된 제2 위치 리테이너를 포함하는 것인 회전식 절단 디바이스.
- 제6항에 있어서, 상기 제1 위치 리테이너는 상기 세장형 본체의 종축에 전반적으로 직교하는 편평면으로부터 형성되고, 이는 또한 상기 블레이드를 상기 종축과 전반적으로 정렬된 위치에 유지하는 것인 회전식 절단 디바이스.
- 제7항에 있어서, 상기 제1 및 제2 위치 리테이너 사이의 상기 캠 종동자의 결합면은 상기 세장형 본체의 종축에 대해 비직교하는 것인 회전식 절단 디바이스.
- 제6항에 있어서, 상기 제2 위치 리테이너는 상기 세장형 본체의 종축에 전반적으로 직교하는 편평면으로부터 형성되는 것인 회전식 절단 디바이스.
- 제6항에 있어서, 상기 제2 위치 리테이너는 상기 제1 위치 리테이너보다 상기 세장형 본체의 원위 단부에 더 가깝게 위치되는 것인 회전식 절단 디바이스.
- 제6항에 있어서, 상기 블레이드가 제1 및 제2 위치 사이에 위치되어 있는 제3 위치에 상기 캠을 유지하기 위해 상기 제1 및 제2 위치 리테이너 사이에 위치된 제3 위치 리테이너를 더 포함하는 회전식 절단 디바이스.
- 제6항에 있어서, 10도 내지 40도의 블레이드 위치에 대응하는 제4 위치에 상기 캠을 유지하기 위해 상기 제1 및 제3 리테이너 사이에 위치된 제4 위치 리테이너를 더 포함하는 회전식 절단 디바이스.
- 제6항에 있어서, 50도 내지 80도의 블레이드 위치에 대응하는 제5 위치에 상기 캠을 유지하기 위해 상기 제2 및 제3 리테이너 사이에 위치된 제5 위치 리테이너를 더 포함하는 회전식 절단 디바이스.
- 제1항에 있어서, 상기 캠을 적소에 유지하도록 구성된 하우징을 더 포함하고, 여기서 상기 하우징은 상기 캠이 우발적으로 변위되는 것을 방지하고 단지 하나의 축 둘레로 상기 캠의 회전을 제한하기 위해 상기 캠을 수용하는 내부 측면을 포함하는 것인 회전식 절단 디바이스.
- 제1항에 있어서, 상기 캠 종동자를 상기 캠과 접촉하여 유지하도록 상기 캠 종동자를 상기 캠을 향해 편향시키도록 구성되고 상기 내부 샤프트를 상기 세장형 본체의 원위 단부를 향해 편향시키도록 구성된 편향 메커니즘을 더 포함하는 회전식 절단 디바이스.
- 제1항에 있어서, 상기 근위 단부에 위치된 구동 허브를 더 포함하고, 상기 구동 허브는 핸드피스 상의 제어부에 의해 제어되는 바와 같이, 상기 내부 샤프트 및 블레이드에 회전 모션을 부여하기 위해 핸드피스와 기계적으로 접하여 상기 내부 샤프트를 배치하도록 구성되는 것인 회전식 절단 디바이스.
- 제1항에 있어서, 상기 내부 샤프트를 상기 블레이드에 연결하는 상기 연결 시스템은, 상기 외부 튜브에 관한 상기 내부 샤프트의 선형 운동시에 상기 블레이드를 상기 제2 플립 위치로 회전시키기 위해 상기 블레이드의 회전 운동으로의 상기 내부 샤프트의 선형 운동의 변환을 허용하는 핀 및 슬롯을 포함하고, 상기 핀은 상기 블레이드의 회전을 허용하기 위해 상기 슬롯 내에서 활주하고, 상기 블레이드는, 상기 블레이드가 상기 제2 플립 위치에 있을 때 상기 세장형 본체의 종축에 대해 비평행 위치로 관절 연결되고, 상기 제2 플립 위치에서, 상기 블레이드가 상기 제2 플립 위치에 잠금될 때 구멍의 역행 드릴링을 위해 상기 블레이드의 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되는 것인 회전식 절단 디바이스.
- 회전식 절단 디바이스로서,
원위 단부, 근위 단부 및 종축을 갖는 세장형 본체로서, 상기 세장형 본체는 외부 튜브 및 상기 외부 튜브에 의해 수용된 내부 샤프트를 더 포함하는 것인, 세장형 본체;
상기 본체의 원위 단부에 있는 블레이드로서, 상기 블레이드는 상기 종축과 전반적으로 정렬된 제1 위치로부터 상기 종축과 비평행한 제2 플립 위치로 회전하도록 구성되는 것인, 블레이드; 및
상기 블레이드를 상기 외부 튜브 및 상기 내부 샤프트 양자 모두의 원위 단부에 연결하는 블레이드 위치 제어 시스템을 포함하고,
상기 블레이드 위치 제어 시스템은:
상기 블레이드가 상기 종축과 전반적으로 정렬된 제1 위치로부터 상기 종축과 비평행한 제2 플립 위치로 이동하게 하는 상기 내부 샤프트를 상기 블레이드에 연결하는 연결 시스템으로서, 상기 블레이드가 상기 제2 플립 위치에 잠금될 때 구멍의 역행 드릴링을 위해 상기 블레이드의 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되는 것인, 연결 시스템;
상기 블레이드를 상기 제1 및 제2 위치로 이동시키기 위해 캠 종동자와 접하고 상기 내부 샤프트와 접하는 캠으로서, 상기 캠 종동자는, 제1 위치에 캠을 유지하도록 구성되고 또한 상기 종축과 전반적으로 정렬된 위치에 상기 블레이드를 유지하는 제1 위치 리테이너, 및 상기 내부 샤프트와 상기 블레이드가 회전하게 하면서 구멍의 역행 드릴링을 위해 상기 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되도록 상기 블레이드의 절단 모서리가 위치되어 있는 제2 위치에 상기 캠을 유지하도록 구성된 제2 위치 리테이너를 포함하는 것인, 캠; 및
상기 캠을 제2 위치에 유지하여 상기 내부 샤프트가 상기 제2 위치에 유지되게 하여, 이에 의해 상기 내부 샤프트와 상기 블레이드를 회전하게 하면서 구멍의 역행 드릴링을 위해 상기 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되도록 상기 블레이드의 절단 모서리를 적소에 유지하도록 구성된 위치 유지 시스템을 포함하고;
상기 위치 유지 시스템은 상기 캠으로부터 연장되는 적어도 하나의 핀을 포함하고, 상기 위치 유지 시스템은, 상기 적어도 하나의 핀이 상기 내부 샤프트의 적어도 하나의 홈에 존재하는 동안 상기 내부 샤프트가 회전 가능하여, 이에 의해 상기 내부 샤프트의 축방향 운동을 방지하도록 상기 캠으로부터 연장되는 적어도 하나의 핀을 수용하기 위한 적어도 하나의 홈을 상기 내부 샤프트 상에 포함하는 것인 회전식 절단 디바이스. - 제16항에 있어서, 상기 위치 유지 시스템은 상기 내부 샤프트 상의 상기 핀, 상기 캠 및 상기 적어도 하나의 홈 사이의 잠재적인 오정렬을 처리하도록 상기 적어도 하나의 핀을 수용하기 위한 상기 캠 내의 적어도 하나의 슬롯을 포함하는 것인 회전식 절단 디바이스.
- 제16항에 있어서, 상기 캠을 적소에 유지하도록 구성된 하우징으로서, 여기서 상기 하우징은 상기 캠이 우발적으로 변위되는 것을 방지하고 단지 하나의 축 둘레로 상기 캠의 회전을 제한하기 위해 상기 캠을 수용하는 내부 측면을 포함하는 것인, 하우징; 상기 캠 종동자를 상기 캠과 접촉하여 유지하도록 상기 캠 종동자를 상기 캠을 향해 편향시키도록 구성되고 상기 내부 샤프트를 상기 세장형 본체의 원위 단부를 향해 편향시키도록 구성된 편향 메커니즘; 및 상기 근위 단부에 위치한 구동 허브로서, 상기 구동 허브는 핸드피스 상의 제어부에 의해 제어되는 바와 같이, 상기 내부 샤프트 및 상기 블레이드에 회전 모션을 부여하기 위해 핸드피스와 기계적으로 접하여 상기 내부 샤프트를 배치하도록 구성되는 것인, 구동 허브를 더 포함하는 회전식 절단 디바이스.
- 뼈 내에 소켓을 생성하는 방법으로서,
뼈 표면에 대한 액세스를 제공함으로써 환자 내에 수술 부위를 준비하는 단계;
블레이드가 회전하도록 디바이스를 활성화하는 단계로서, 상기 디바이스는:
원위 단부, 근위 단부 및 종축을 갖는 세장형 본체로서, 상기 세장형 본체는 외부 튜브 및 상기 외부 튜브에 의해 수용된 내부 샤프트를 더 포함하는 것인, 세장형 본체;
상기 본체의 원위 단부에 있는 블레이드로서, 상기 블레이드는 상기 종축과 전반적으로 정렬된 제1 위치로부터 상기 종축과 비평행한 제2 플립 위치로 회전하도록 구성되는 것인, 블레이드; 및
상기 블레이드를 상기 외부 튜브 및 상기 내부 샤프트 양자 모두의 원위 단부에 연결하는 블레이드 위치 제어 시스템을 포함하고,
상기 블레이드 위치 제어 시스템은:
상기 블레이드가 상기 종축과 전반적으로 정렬된 제1 위치로부터 상기 종축과 비평행한 제2 플립 위치로 이동하게 하는 상기 내부 샤프트를 상기 블레이드에 연결하는 연결 시스템으로서, 상기 블레이드가 상기 제2 플립 위치에 잠금될 때 구멍의 역행 드릴링을 위해 상기 블레이드의 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되는 것인, 연결 시스템;
상기 블레이드를 상기 제1 및 제2 위치로 이동시키기 위해 캠 종동자와 접하고 상기 내부 샤프트와 접하는 캠; 및
상기 캠을 제2 위치에 유지하여 상기 내부 샤프트가 상기 제2 위치에 유지되게 하여, 이에 의해 상기 내부 샤프트와 상기 블레이드를 회전하게 하면서 구멍의 역행 드릴링을 위해 상기 절단 모서리가 상기 세장형 본체의 근위 단부를 향해 노출되도록 상기 블레이드의 절단 모서리를 적소에 유지하도록 구성된 위치 유지 시스템을 포함하는 것인, 디바이스 활성화 단계;
뼈 내로 구멍을 드릴링하는 단계;
일단 상기 블레이드가 뼈를 완전히 통과하면, 상기 디바이스를 작동시켜 상기 캠을 제1 위치로부터 제2 위치로 이동시켜, 상기 블레이드를 제1 위치로부터 상기 블레이드가 상기 디바이스의 종축과 덜 정렬되는 제2 위치로 이동하게 하는 단계;
상기 블레이드가 회전하도록 상기 디바이스를 활성화하는 단계;
상기 블레이드가 뼈와 접촉하고 역행 소켓 또는 터널을 생성하도록 상기 블레이드를 인출하는 단계
를 포함하는 방법. - 제21항에 있어서, 상기 제1 위치로부터 제2 위치로 상기 캠을 이동시키기 위해 상기 디바이스를 작동하는 단계는 상기 블레이드가 0도인 제1 위치와 90도인 제2 위치 사이의 제3 위치에 위치되도록 상기 블레이드를 이동시키도록 상기 디바이스를 작동하는 단계를 포함하는 것인 방법.
- 제21항에 있어서, 상기 제1 위치로부터 제2 위치로 상기 캠을 이동시키기 위해 상기 디바이스를 작동하는 단계는 상기 블레이드가 0도인 제1 위치와 45도인 제3 위치 사이의 위치에 위치되도록 상기 블레이드를 이동시키도록 상기 디바이스를 작동하는 단계를 포함하는 것인 방법.
- 제21항에 있어서, 상기 제1 위치로부터 제2 위치로 상기 캠을 이동시키기 위해 상기 디바이스를 작동하는 단계는 상기 블레이드가 90도인 제2 위치와 45도인 제3 위치 사이의 위치에 위치되도록 상기 블레이드를 이동시키도록 상기 디바이스를 작동하는 단계를 포함하는 것인 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/683,434 US10695073B2 (en) | 2017-08-22 | 2017-08-22 | Control system for retrograde drill medical device |
| US15/683,434 | 2017-08-22 | ||
| PCT/US2018/021994 WO2019040121A1 (en) | 2017-08-22 | 2018-03-12 | CONTROL SYSTEM FOR RETROGRADE DRILLING MEDICAL DEVICE |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200044043A true KR20200044043A (ko) | 2020-04-28 |
| KR102555089B1 KR102555089B1 (ko) | 2023-07-12 |
Family
ID=65436508
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207007957A Active KR102555089B1 (ko) | 2017-08-22 | 2018-03-12 | 역행 드릴 의료 디바이스용 제어 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10695073B2 (ko) |
| EP (1) | EP3672504B1 (ko) |
| JP (1) | JP7019797B2 (ko) |
| KR (1) | KR102555089B1 (ko) |
| CN (1) | CN110996817B (ko) |
| WO (1) | WO2019040121A1 (ko) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8388624B2 (en) | 2003-02-24 | 2013-03-05 | Arthrosurface Incorporated | Trochlear resurfacing system and method |
| AU2007332787A1 (en) | 2006-12-11 | 2008-06-19 | Arthrosurface Incorporated | Retrograde resection apparatus and method |
| WO2010121250A1 (en) | 2009-04-17 | 2010-10-21 | Arthrosurface Incorporated | Glenoid resurfacing system and method |
| WO2016154393A1 (en) | 2009-04-17 | 2016-09-29 | Arthrosurface Incorporated | Glenoid repair system and methods of use thereof |
| AU2011222404A1 (en) | 2010-03-05 | 2012-09-27 | Arthrosurface Incorporated | Tibial resurfacing system and method |
| EP2804565B1 (en) | 2011-12-22 | 2018-03-07 | Arthrosurface Incorporated | System for bone fixation |
| DE112013003358T5 (de) | 2012-07-03 | 2015-03-19 | Arthrosurface, Inc. | System und Verfahren für Gelenkoberflächenersatz und -reparatur |
| US9492200B2 (en) | 2013-04-16 | 2016-11-15 | Arthrosurface Incorporated | Suture system and method |
| US20150250472A1 (en) | 2014-03-07 | 2015-09-10 | Arthrosurface Incorporated | Delivery System for Articular Surface Implant |
| US11607319B2 (en) | 2014-03-07 | 2023-03-21 | Arthrosurface Incorporated | System and method for repairing articular surfaces |
| US10624748B2 (en) | 2014-03-07 | 2020-04-21 | Arthrosurface Incorporated | System and method for repairing articular surfaces |
| BR122022014776B1 (pt) | 2014-10-19 | 2023-12-26 | T.A.G. Medical Devices - Agriculture Cooperative Ltd | Conjunto incluindo um sistema de orientação e dispositivo para remoção de material ósseo e método para perfuração de um túnel ósseo em um osso |
| US10448959B2 (en) | 2015-04-09 | 2019-10-22 | T.A.G. Medical Devices—Agriculture Cooperative Ltd. | Bone material removal device and a method for use thereof |
| DE102015111878A1 (de) | 2015-07-22 | 2017-01-26 | Aesculap Ag | Platzsparende Ratscheinheit mit Freilauf |
| DE102015111877A1 (de) * | 2015-07-22 | 2017-01-26 | Aesculap Ag | Werkzeugaufnahmeaufsatz für chirurgische Bohrmaschine mit zusätzlicher manueller Antriebseinheit und chirurgische Bohrmaschine |
| WO2017137998A2 (en) | 2016-02-11 | 2017-08-17 | T.A.G. Medical Devices - Agriculture Cooperative Ltd. | Bone material removal device and a method for use thereof |
| US11020132B2 (en) | 2016-04-24 | 2021-06-01 | T.A.G. Medical Devices—Agriculture Cooperative Ltd. | Guiding device and method of using thereof |
| EP3638132A1 (en) * | 2017-06-12 | 2020-04-22 | ConMed Corporation | Orthopedic drill bit with swiveling head |
| US11160663B2 (en) | 2017-08-04 | 2021-11-02 | Arthrosurface Incorporated | Multicomponent articular surface implant |
| US11510686B2 (en) * | 2018-07-05 | 2022-11-29 | Conmed Corporation | Retrograde drilling device |
| CA3105930C (en) | 2018-08-01 | 2023-01-31 | T.A.G. Medical Devices - Agriculture Cooperative Ltd. | Adjustable drilling device and a method for use thereof |
| US11478358B2 (en) | 2019-03-12 | 2022-10-25 | Arthrosurface Incorporated | Humeral and glenoid articular surface implant systems and methods |
| US11819233B2 (en) * | 2020-01-24 | 2023-11-21 | Medtronic Xomed, Inc. | Devices and techniques for separating tissue |
| EP4059449A1 (en) * | 2021-03-15 | 2022-09-21 | Fundación Tecnalia Research & Innovation | Expansive drill and method for drilling a hole using said expansive drill |
| EP4447825A4 (en) * | 2021-12-17 | 2026-02-18 | Joint Preservation Innovations Llc | ARTICULATED ROTARY CUTTING TOOL |
| JP7260118B1 (ja) | 2021-12-22 | 2023-04-18 | 学校法人東京女子医科大学 | ドリルストッパ |
| CN114587515B (zh) * | 2022-03-15 | 2024-05-07 | 青岛智兴医疗器械有限公司 | 一种可360°转动并可调整刀头角度的可旋转铰刀 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130122932A (ko) * | 2010-06-29 | 2013-11-11 | 신세스 게엠바하 | 고정구 조립체용 삽입 기구 |
| US20140276844A1 (en) * | 2013-03-12 | 2014-09-18 | Smith & Nephew, Inc. | Retro guidewire reamer |
| US20150351777A1 (en) * | 2014-06-10 | 2015-12-10 | Medos International Sarl | Retro-cutting instrument with adjustable limit setting |
| US20170137998A1 (en) * | 2015-11-17 | 2017-05-18 | Stowe Woodward Licensco, Llc | Polyurethane roll cover for calender roll for papermaking machine |
Family Cites Families (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4963147A (en) | 1987-09-18 | 1990-10-16 | John M. Agee | Surgical instrument |
| US5620456A (en) | 1995-10-20 | 1997-04-15 | Lasersurge, Inc. | Trocar assembly |
| US6332880B1 (en) | 1996-12-19 | 2001-12-25 | Ep Technologies, Inc. | Loop structures for supporting multiple electrode elements |
| US5913867A (en) | 1996-12-23 | 1999-06-22 | Smith & Nephew, Inc. | Surgical instrument |
| US6048346A (en) | 1997-08-13 | 2000-04-11 | Kyphon Inc. | Systems and methods for injecting flowable materials into bones |
| US6033411A (en) | 1997-10-14 | 2000-03-07 | Parallax Medical Inc. | Precision depth guided instruments for use in vertebroplasty |
| US6053907A (en) | 1998-08-13 | 2000-04-25 | Endius Incorporated | Surgical instruments with flexible drive shaft |
| US6464711B1 (en) | 1999-03-19 | 2002-10-15 | Medtronic Xomed, Inc. | Articulating mechanism for steerable surgical cutting instruments |
| US6358251B1 (en) | 2000-03-21 | 2002-03-19 | University Of Washington | Method and apparatus for forming a cavity in soft tissue or bone |
| US6610067B2 (en) | 2000-05-01 | 2003-08-26 | Arthrosurface, Incorporated | System and method for joint resurface repair |
| US6520964B2 (en) | 2000-05-01 | 2003-02-18 | Std Manufacturing, Inc. | System and method for joint resurface repair |
| US8057477B2 (en) | 2000-06-24 | 2011-11-15 | Greatbatch Medical S.A. | Guided reamer system for reshaping bone |
| US6669698B1 (en) | 2000-10-24 | 2003-12-30 | Sdgi Holdings, Inc. | Vertebrae fastener placement guide |
| US6916306B1 (en) | 2000-11-10 | 2005-07-12 | Boston Scientific Scimed, Inc. | Steerable loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| US6610058B2 (en) | 2001-05-02 | 2003-08-26 | Cardiac Pacemakers, Inc. | Dual-profile steerable catheter |
| US6478801B1 (en) | 2001-07-16 | 2002-11-12 | Third Millennium Engineering, Llc | Insertion tool for use with tapered trial intervertebral distraction spacers |
| US7828804B2 (en) | 2002-11-08 | 2010-11-09 | Warsaw Orthopedic, Inc. | Transpedicular intervertebral disk access methods and devices |
| US7238189B2 (en) * | 2003-03-18 | 2007-07-03 | Arthrex, Inc. | ACL reconstruction technique using retrodrill |
| WO2005023085A2 (en) | 2003-09-03 | 2005-03-17 | Kyphon Inc. | Devices for creating voids in interior body regions and related methods |
| EP1514518A1 (en) | 2003-09-11 | 2005-03-16 | SDGI Holdings, Inc. | Impulsive percussion instruments for endplate preparation |
| CA2593182A1 (en) | 2003-11-20 | 2006-07-13 | Arthrosurface, Inc. | System and method for retrograde procedure |
| US7909873B2 (en) * | 2006-12-15 | 2011-03-22 | Soteira, Inc. | Delivery apparatus and methods for vertebrostenting |
| US8603106B2 (en) | 2005-05-20 | 2013-12-10 | Neotract, Inc. | Integrated handle assembly for anchor delivery system |
| US8080061B2 (en) | 2005-06-20 | 2011-12-20 | Synthes Usa, Llc | Apparatus and methods for treating bone |
| US8021366B2 (en) | 2005-07-11 | 2011-09-20 | Kyphon Sarl | Axial load limiting system and methods |
| US7442195B1 (en) | 2005-09-12 | 2008-10-28 | Behrens Alfred F | Apparatus and method for the reduction of bone fractures |
| US8016846B2 (en) | 2005-10-27 | 2011-09-13 | Medtronic Xomed, Inc. | Micro-resecting and evoked potential monitoring system and method |
| US8465491B2 (en) | 2006-06-01 | 2013-06-18 | Osteo Innovations Llc | Bone drill |
| US8480673B2 (en) | 2006-06-01 | 2013-07-09 | Osteo Innovations Llc | Cavity creation device and methods of use |
| US7780690B2 (en) | 2006-06-08 | 2010-08-24 | Recon Surgical, Inc. | Instruments and method for minimally invasive carpal tunnel release |
| US7666200B2 (en) | 2006-07-19 | 2010-02-23 | Target Medical Innovations Llc | Endoscopic cutting instrument with axial and rotary motion |
| AU2007332787A1 (en) | 2006-12-11 | 2008-06-19 | Arthrosurface Incorporated | Retrograde resection apparatus and method |
| GB0702948D0 (en) | 2007-02-15 | 2007-03-28 | Depuy Int Ltd | A tool for forming a cavity within a bone |
| US8591514B2 (en) | 2007-05-02 | 2013-11-26 | Arthrex, Inc. | Retrograde cutter with rotating blade |
| US8652139B2 (en) | 2007-05-02 | 2014-02-18 | Arthrex, Inc. | Flip retrograde cutting instrument |
| US8012170B2 (en) * | 2009-04-27 | 2011-09-06 | Tyco Healthcare Group Lp | Device and method for controlling compression of tissue |
| US20090131886A1 (en) | 2007-11-16 | 2009-05-21 | Liu Y King | Steerable vertebroplasty system |
| EP2098177B1 (en) | 2008-03-03 | 2013-10-16 | Arthrex, Inc. | Combined flip cutter and drill |
| CA2722972A1 (en) | 2008-05-05 | 2009-11-12 | Stryker Corporation | Surgical tool system including a tool and a console, the console capable of reading data from a memory integral with the tool over the conductors over which power is sourced to the tool |
| US8394101B2 (en) | 2009-02-23 | 2013-03-12 | Globus Medical, Inc. | Discectomy instrument |
| WO2010111246A1 (en) | 2009-03-23 | 2010-09-30 | Soteira, Inc. | Devices and methods for vertebrostenting |
| US8852201B2 (en) | 2009-03-30 | 2014-10-07 | Arthrex, Inc. | Microfracture instrument |
| US8449552B2 (en) | 2009-06-04 | 2013-05-28 | Quantum Surgical | Surgical drill guide with awl and method of use |
| CA2713309C (en) | 2009-08-20 | 2013-07-02 | Howmedica Osteonics Corp. | Flexible acl instrumentation, kit and method |
| US8480682B2 (en) | 2009-08-28 | 2013-07-09 | Zimmer Dental, Inc. | Device for limiting the drilling depth of a drill |
| US8348950B2 (en) | 2010-01-04 | 2013-01-08 | Zyga Technology, Inc. | Sacroiliac fusion system |
| US8535311B2 (en) | 2010-04-22 | 2013-09-17 | Ethicon Endo-Surgery, Inc. | Electrosurgical instrument comprising closing and firing systems |
| US8801713B2 (en) | 2011-04-07 | 2014-08-12 | DePuy Synthes Products, LLC | Surgical drill instrument with motor and locking mechanism to receive an attachment and a cutting burr |
| EP2704647B1 (en) | 2011-05-05 | 2016-08-24 | Zyga Technology, Inc. | Sacroiliac fusion system |
| EP2706931B1 (en) | 2011-05-12 | 2015-04-15 | NLT Spine Ltd. | Tissue disruption device |
| AU2012275191B2 (en) | 2011-06-30 | 2016-12-15 | Depuy Ireland Unlimited Company | Patella clamp and drill guide surgical instrument |
| US9119639B2 (en) | 2011-08-09 | 2015-09-01 | DePuy Synthes Products, Inc. | Articulated cavity creator |
| DE102012008970B3 (de) | 2012-05-03 | 2013-06-27 | Joimax Gmbh | Chirurgische Werkzeugeinrichtung |
| US9439693B2 (en) | 2013-02-01 | 2016-09-13 | DePuy Synthes Products, Inc. | Steerable needle assembly for use in vertebral body augmentation |
| US20140263541A1 (en) * | 2013-03-14 | 2014-09-18 | Ethicon Endo-Surgery, Inc. | Articulatable surgical instrument comprising an articulation lock |
| WO2015168359A1 (en) | 2014-04-30 | 2015-11-05 | Gyrus Acmi, Inc., D.B.A. Olympus Surgical | Rotary tool with improved coupling assembly |
| CN107849961B (zh) | 2015-08-05 | 2019-10-25 | 康明斯排放处理公司 | 使用后处理系统的NOx传感器进行发动机排出NOx估计的氧校正 |
| WO2017137998A2 (en) * | 2016-02-11 | 2017-08-17 | T.A.G. Medical Devices - Agriculture Cooperative Ltd. | Bone material removal device and a method for use thereof |
-
2017
- 2017-08-22 US US15/683,434 patent/US10695073B2/en active Active
-
2018
- 2018-03-12 WO PCT/US2018/021994 patent/WO2019040121A1/en not_active Ceased
- 2018-03-12 CN CN201880053761.XA patent/CN110996817B/zh active Active
- 2018-03-12 EP EP18848385.3A patent/EP3672504B1/en active Active
- 2018-03-12 KR KR1020207007957A patent/KR102555089B1/ko active Active
- 2018-03-12 JP JP2020510593A patent/JP7019797B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130122932A (ko) * | 2010-06-29 | 2013-11-11 | 신세스 게엠바하 | 고정구 조립체용 삽입 기구 |
| US20140276844A1 (en) * | 2013-03-12 | 2014-09-18 | Smith & Nephew, Inc. | Retro guidewire reamer |
| US20150351777A1 (en) * | 2014-06-10 | 2015-12-10 | Medos International Sarl | Retro-cutting instrument with adjustable limit setting |
| JP2015231527A (ja) * | 2014-06-10 | 2015-12-24 | メドス・インターナショナル・エスエイアールエルMedos International SARL | 可変限界設定を用いた逆方向切削器具 |
| US20170137998A1 (en) * | 2015-11-17 | 2017-05-18 | Stowe Woodward Licensco, Llc | Polyurethane roll cover for calender roll for papermaking machine |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3672504B1 (en) | 2024-10-23 |
| US20190059910A1 (en) | 2019-02-28 |
| WO2019040121A1 (en) | 2019-02-28 |
| US10695073B2 (en) | 2020-06-30 |
| EP3672504A1 (en) | 2020-07-01 |
| CN110996817B (zh) | 2023-05-26 |
| EP3672504A4 (en) | 2021-05-05 |
| JP7019797B2 (ja) | 2022-02-15 |
| CN110996817A (zh) | 2020-04-10 |
| JP2020531136A (ja) | 2020-11-05 |
| EP3672504C0 (en) | 2024-10-23 |
| KR102555089B1 (ko) | 2023-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102555089B1 (ko) | 역행 드릴 의료 디바이스용 제어 시스템 | |
| US12369927B2 (en) | Adjustable drilling device and a method for use thereof | |
| CN114269268B (zh) | 具有两部分式驱动杆的钳 | |
| US7976563B2 (en) | Medical instrument | |
| EP2231035B1 (en) | Multiple portal guide | |
| US8221424B2 (en) | Surgical instrument for orthopedic surgery | |
| US20040147909A1 (en) | Surgical instrument | |
| US20130282013A1 (en) | Discectomy Instrument | |
| WO2004052216A1 (en) | Bone resection device | |
| US11510687B2 (en) | Surgical rotary cutting tool including articulable head | |
| US20250049444A1 (en) | Incision Tools And Methods Of Use | |
| WO2017042914A1 (ja) | 骨掘削用リーマー | |
| US11751866B2 (en) | Endoscopic stitching device having angled suture needle | |
| US20240366237A1 (en) | Fixed Angle Tool Holder | |
| CN115969463B (zh) | 一种骨组织切除装置 | |
| KR102629508B1 (ko) | 수술용 쉐이버 샤프트 및 이를 포함하는 수술용 쉐이버 | |
| US20220211403A1 (en) | Reciprocating serrated blade for precision dissection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200318 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20201218 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20220928 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20230426 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20230710 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20230710 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |