이하, 본 개시의 실시를 위한 구체적인 내용을 첨부된 도면을 참조하여 상세히 설명한다. 다만, 이하의 설명에서는 본 개시의 요지를 불필요하게 흐릴 우려가 있는 경우, 널리 알려진 기능이나 구성에 관한 구체적 설명은 생략하기로 한다.
첨부된 도면에서, 동일하거나 대응하는 구성요소에는 동일한 참조부호가 부여되어 있다. 또한, 이하의 실시예들의 설명에 있어서, 동일하거나 대응되는 구성요소를 중복하여 기술하는 것이 생략될 수 있다. 그러나, 구성요소에 관한 기술이 생략되어도, 그러한 구성요소가 어떤 실시예에 포함되지 않는 것으로 의도되지는 않는다.
개시된 실시예의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나, 본 개시는 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 개시가 완전하도록 하고, 본 개시가 통상의 기술자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것일 뿐이다.
본 명세서에서 사용되는 용어에 대해 간략히 설명하고, 개시된 실시예에 대해 구체적으로 설명하기로 한다. 본 명세서에서 사용되는 용어는 본 개시에서의 기능을 고려하면서 가능한 현재 널리 사용되는 일반적인 용어들을 선택하였으나, 이는 관련 분야에 종사하는 기술자의 의도 또는 판례, 새로운 기술의 출현 등에 따라 달라질 수 있다. 또한, 특정한 경우는 출원인이 임의로 선정한 용어도 있으며, 이 경우 해당되는 발명의 설명 부분에서 상세히 그 의미를 기재할 것이다. 따라서, 본 개시에서 사용되는 용어는 단순한 용어의 명칭이 아닌, 그 용어가 가지는 의미와 본 개시의 전반에 걸친 내용을 토대로 정의되어야 한다.
본 명세서에서의 단수의 표현은 문맥상 명백하게 단수인 것으로 특정하지 않는 한, 복수의 표현을 포함한다. 또한, 복수의 표현은 문맥상 명백하게 복수인 것으로 특정하지 않는 한, 단수의 표현을 포함한다. 명세서 전체에서 어떤 부분이 어떤 구성요소를 포함한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있음을 의미한다.
또한, 명세서에서 사용되는 '모듈' 또는 '부'라는 용어는 소프트웨어 또는 하드웨어 구성요소를 의미하며, '모듈' 또는 '부'는 어떤 역할들을 수행한다. 그렇지만, '모듈' 또는 '부'는 소프트웨어 또는 하드웨어에 한정되는 의미는 아니다. '모듈' 또는 '부'는 어드레싱할 수 있는 저장 매체에 있도록 구성될 수도 있고 하나 또는 그 이상의 프로세서들을 재생시키도록 구성될 수도 있다. 따라서, 일 예로서, '모듈' 또는 '부'는 소프트웨어 구성요소들, 객체지향 소프트웨어 구성요소들, 클래스 구성요소들 및 태스크 구성요소들과 같은 구성요소들과, 프로세스들, 함수들, 속성들, 프로시저들, 서브루틴들, 프로그램 코드의 세그먼트들, 드라이버들, 펌웨어, 마이크로 코드, 회로, 데이터, 데이터베이스, 데이터 구조들, 테이블들, 어레이들 또는 변수들 중 적어도 하나를 포함할 수 있다. 구성요소들과 '모듈' 또는 '부'들은 안에서 제공되는 기능은 더 작은 수의 구성요소들 및 '모듈' 또는 '부'들로 결합되거나 추가적인 구성요소들과 '모듈' 또는 '부'들로 더 분리될 수 있다.
본 개시의 일 실시예에 따르면, '모듈' 또는 '부'는 프로세서 및 메모리로 구현될 수 있다. '프로세서'는 범용 프로세서, 중앙 처리 장치(CPU), 마이크로프로세서, 디지털 신호 프로세서(DSP), 제어기, 마이크로제어기, 상태 머신 등을 포함하도록 넓게 해석되어야 한다. 몇몇 환경에서, '프로세서'는 주문형 반도체(ASIC), 프로그램가능 로직 디바이스(PLD), 필드 프로그램가능 게이트 어레이(FPGA) 등을 지칭할 수도 있다. '프로세서'는, 예를 들어, DSP와 마이크로프로세서의 조합, 복수의 마이크로프로세서들의 조합, DSP 코어와 결합한 하나 이상의 마이크로프로세서들의 조합, 또는 임의의 다른 그러한 구성들의 조합과 같은 처리 디바이스들의 조합을 지칭할 수도 있다. 또한, '메모리'는 전자 정보를 저장 가능한 임의의 전자 컴포넌트를 포함하도록 넓게 해석되어야 한다. '메모리'는 임의 액세스 메모리(RAM), 판독-전용 메모리(ROM), 비-휘발성 임의 액세스 메모리(NVRAM), 프로그램가능 판독-전용 메모리(PROM), 소거-프로그램가능 판독 전용 메모리(EPROM), 전기적으로 소거가능 PROM(EEPROM), 플래쉬 메모리, 자기 또는 광학 데이터 저장장치, 레지스터들 등과 같은 프로세서-판독가능 매체의 다양한 유형들을 지칭할 수도 있다. 프로세서가 메모리로부터 정보를 판독하고/하거나 메모리에 정보를 기록할 수 있다면 메모리는 프로세서와 전자 통신 상태에 있다고 불린다. 프로세서에 집적된 메모리는 프로세서와 전자 통신 상태에 있다.
또한, 이하의 실시예들에서 사용되는 제1, 제2, A, B, (a), (b) 등의 용어는 어떤 구성요소를 다른 구성요소와 구별하기 위해 사용되는 것일 뿐, 그 용어에 의해 해당 구성요소의 본질이나 차례 또는 순서 등이 한정되지는 않는다.
또한, 이하의 실시예들에서, 어떤 구성요소가 다른 구성요소에 '연결', '결합' 또는 '접속'된다고 기재된 경우, 그 구성요소는 그 다른 구성요소에 직접적으로 연결되거나 또는 접속될 수 있지만, 각 구성요소 사이에 또 다른 구성요소가 '연결', '결합' 또는 '접속'될 수도 있다고 이해되어야 한다.
본 개시에서, '복수의 A 각각' 은 복수의 A에 포함된 모든 구성 요소의 각각을 지칭하거나, 복수의 A에 포함된 일부 구성 요소의 각각을 지칭할 수 있다.
또한, 이하의 실시예들에서 사용되는 '포함한다(comprises)' 및/또는 '포함하는(comprising)'은 언급된 구성요소, 단계, 동작 및/또는 소자는 하나 이상의 다른 구성요소, 단계, 동작 및/또는 소자의 존재 또는 추가를 배제하지 않는다.
본 개시에서, '알약'은 일정한 형상을 가진 고체 제제를 지칭할 수 있다. 예를 들어, '알약'은 압축된 분말 또는 과립으로 만들어질 수 있으며, 하나 이상의 활성 성분을 함유하여 제제 형태를 유지할 수 있다. 또한, 알약은 다양한 크기와 모양으로 제공될 수 있다. 예를 들어, 알약은 원형, 타원형, 정사각형, 원통형 등 다양한 모양일 수 있으며, 고체 제제 형태에서 쪼개진 모양일 수 있다. 또한, 알약은 그 재료와 성분에 따라 다양한 색상이 될 수 있다. 또한, 알약의 한쪽 또는 양면에 인쇄물과 같은 각인이 있을 수 있다. 각인은 로고, 약품명, 복용량, 제조업체 등의 정보가 포함할 수 있다. 또한, 알약의 표면은 스크래치나 균열과 같은 다른 표면 표시가 있을 수 있다. 위와 같은 알약의 특징은 약포에 포함된 알약이 처방한 알약과 동일한지 또는 상이한지 판단하기 위해 이용될 수 있다. 일 예로서, 알약은 정(tablet), 서방정(Extended Releasing Tablet), 장용정(Gastro-resistant Tablet), 삼중정(Triple Tablet), 구강붕해정(Oral Distegrating Tablet), 당의정(Sugar-coated Tablet), 트로키정, 질정, 장용제(Enteric-coated pills) 캡슐(Capslue), 연질 캡슐 등과 같은 제형 제제로 구현될 수 있으나, 이에 한정되지 않는다. 알약은 블리스터(Blister), 파우치(Pouch), 포(Sachet) 및 병(Bottle) 등에 포장될 수 있다.
본 개시에서, '약포'는 의약품을 손상, 오염 등으로부터 보호하고, 환자가 쉽게 복용할 수 있도록 1회 복용량 기준으로 적어도 하나의 알약을 단위 복용량 패키징(unit dose packaging)한 형태의 의약품 포장을 지칭할 수 있다. 일 예로서, 약포는 파우치(Pouch), 블리스터(Blister), 포(Sachet), 컨테이너(Container), 시린지(Syringe) 등으로 구현될 수 있으나, 이에 한정되지 않는다. 약포의 표면은 환자에게 중요한 안전 정보를 포함할 수 있다. 예를 들어, 약포의 표면은 환자가 처방 받은 약의 정보를 포함할 수 있다. 구체적으로, 약포에 포함된 약의 종류, 처방 시점, 복용법, 복용량, 처방 받은 환자의 인적 사항 등이 포함될 수 있다. 또한, 약포의 표면은 복용 시점에 관한 정보를 포함할 수 있다. 예를 들어, 복수의 약포에 포장된 약을 아침, 점심, 저녁 복용해야 하는 경우, 약포의 표면은 아침에 복용이 필요한 약의 약포에 '아침', 점심에 복용이 필요한 약의 약포에 '점심', 저녁에 복용이 필요한 약의 약포에 '저녁'과 같은 정보를 포함할 수 있다. 또한, 약포의 표면은 약포의 순서에 관한 정보를 포함할 수 있다. 예를 들어, 환자가 20개 약포를 처방 받은 경우, 약표의 표면은 3번째 약포에 대해 20개 약포 중 3번째 약포와 같은 정보를 포함할 수 있다.
본 개시에서, '약 정보'는 약과 관련된 모든 데이터 중 적어도 일부를 지칭할 수 있다. 예를 들어, 약의 제품명, 유효 기간, 성분, 제조 업체, 일련 번호, 바코드, 형상, 모양, 색체, 각인(imprint) 등 약과 관련된 다양한 정보를 포함할 수 있다. 일 실시예에서, 약 정보는 처방전 데이터 또는 약 개수 패턴일 수 있다.
본 개시에서, '처방전 데이터'는 환자에게 처방한 약 정보를 포함할 수 있다. 예를 들어, 처방전 데이터는 환자 정보, 처방 받은 약의 이름, 복용량, 복용 기간, 복용법, 형상, 모양, 색체, 각인 등을 포함할 수 있다. 추가적으로, 처방전 데이터는 특정 시점에 어떤 약을 복용해야 하는지에 관한 정보를 포함할 수 있다. 추가적으로 또는 대안적으로, 처방전 데이터는 특정 시점에 어떤 약포에 포함된 약을 복용해야 하는지에 관한 정보를 포함할 수 있다.
본 개시에서, '약 개수 패턴'은 복수의 약포 내에 포함된 알약의 개수를 일관성 있게 또는 특징적으로 배열한 정보를 지칭할 수 있다. 예를 들어, 복수의 약포가 3-2-1-3-2-1-…과 같은 개수의 알약을 포함하고 있는 경우, 약 개수 패턴은 3개의 약포마다 순서대로 3개, 2개, 1개의 알약이 포함되어 있다는 정보를 포함할 수 있다. 또한, 약 개수 패턴은 처방전 데이터를 기초로 결정될 수 있다. 즉, 처방전 데이터가 복수의 약포 내에 알약의 개수를 배열하는 정보를 포함하는 것에 응답하여, 약 개수 패턴은 배열 정보를 포함할 수 있다. 대안적으로, 약 개수 패턴은 사용자의 입력된 정보를 기초로 결정될 수 있다. 대안적으로, 약 개수 패턴은 약포 검수 장치에 의해 생성될 수 있다. 구체적으로, 약포 검수 장치는 복수의 약포 중 최초 n개를 검수하여 약 개수 패턴을 생성할 수 있다.
본 개시에서, '카테고리 정보'는 약의 종류를 설명하는 정보를 지칭할 수 있다. 예를 들어, 카테고리 정보는 특정 알약을 고유하게 식별할 수 있는 식별자일 수 있다. 대안적으로, 카테고리 정보는 약포에 포함된 서로 다른 알약의 형상 중 하나를 식별할 수 있는 식별자일 수 있다.
본 개시에서, '캘리브레이션 파라미터(calibration parameter)'는 복수의 카메라와 연관되어, 복수의 카메라가 촬영한 이미지의 객체 인식 결과를 변환하는데 이용되는 값을 지칭할 수 있다. 즉, '캘리브레이션 파라미터'는 서로 다른 복수의 카메라로부터 촬영된 이미지 내의 일부 픽셀들 사이의 위치 관계를 정의할 수 있다. 캘리브레이션 파라미터 생성 방법에 관하여 추후 도 4 및 7를 참조하여 보다 상세히 후술한다.
본 개시에서, '바운딩 박스(bounding box)'는 이미지에서 검출된 객체를 둘러싸는 사각형 영역을 지칭할 수 있다. 바운딩 박스는 객체 인식 모델에 의해 생성될 수 있다. 구체적으로, 약포 내의 알약을 객체로 인식하여, 인식된 알약에 대한 바운딩 박스가 생성될 수 있다. 또한, 바운딩 박스는 인식된 객체별로 생성될 수 있고, 하나의 객체에 복수 개의 바운딩 박스가 생성될 수 있다. 또한, 바운딩 박스는 서로 다른 바운딩 박스와의 비교에 의해 제거될 수 있다.
본 개시에서, '신뢰도 값(confidence value)'은 객체 인식 모델에 의해 생성된 정보로, 이미지에서 객체를 올바르게 인식한 확률/정도를 지칭할 수 있다. 예를 들어, 신뢰도 값은 0에서 1사이의 값을 가질 수 있다. 즉, 신뢰도 값이 0에 가까울수록 객체를 올바르지 않게 인식한 것이며, 1에 가까울수록 객체를 올바르게 인식한 것으로 설정할 수 있다. 또한, 객체 인식 모델에 의해 하나의 객체에 복수의 바운딩 박스가 생성되는 것에 응답하여, 신뢰도 값을 기초로 복수의 바운딩 박스 중 적어도 하나를 선택할 수 있다.
본 개시에서, '인식 결과'는 객체 인식 모델에 의해 생성된 정보로서, 인식된 객체의 위치 정보, 크기 정보, 너비 정보, 높이 정보, 바운딩 박스에 관한 정보 등을 포함할 수 있다. 또한, 인식 결과는 이미지와 또는 이미지와 처방전 데이터를 기초로 객체 인식 모델에 의해 생성된 정보를 포함할 수 있다. 또한, 인식 결과는 신뢰도 값 및/또는 카레고리 정보를 포함할 수 있다.
이하, 본 개시의 다양한 실시예들에 대하여 첨부된 도면에 따라 상세하게 설명한다.
도 1은 본 개시의 일 실시예에 따른 약포 검수 장치의 예시를 나타내는 개요도이다. 도시된 것과 같이, 약포 검수 장치는 제1 카메라(120), 제2 카메라(130) 및 제어부(140)를 포함할 수 있다. 약포 검수 장치는 제1 카메라(120) 및 제2 카메라(130)에 의해 촬영된 약포(112) 이미지 및 약 정보에 기초하여 약포(112)를 검수할 수 있다. 제1 카메라(120)와 제2 카메라(130)는 약포(112)의 서로 다른 면을 촬영하도록 배치될 수 있다. 도 1에서는 2개의 카메라를 이용하여 약포에 대한 검수를 수행하는 것으로 도시되었으나, 이에 한정되지 않으며, 3개 이상의 카메라가 이용될 수 있다.
일 실시예에 따르면, 제1 카메라(120)에 의해 촬영된 약포(112)의 제1 이미지 및 제2 카메라(130)에 의해 촬영된 약포의 제2 이미지는 제어부(140)로 송신될 수 있다. 제어부(140)는 송신된 2개의 이미지와 약포(112)와 연관된 약 정보를 기초로 약포(112)를 검수할 수 있다. 여기서, 약포(112)와 연관된 약 정보는 처방전 데이터 및/또는 약 개수 패턴을 포함할 수 있다.
일 실시예에 따르면, 약포 검수 장치는 약포 자동 포장 장비에 부착되어 사용될 수 있다. 이 경우, 약포 자동 포장 장비에 의해 포장되는 복수의 약포(110)가 약포 검수 장치로 공급될 수 있다. 도시된 바와 같이, 복수의 약포(110)는 제1 카메라(120) 및 제2 카메라(130) 사이에서 화살표 방향으로 이동하면서 검수될 수 있다. 구체적으로, 복수의 약포(110) 중 한 개의 약포(112)가 제1 카메라(120) 및/또는 제2 카메라(130)에 의해 촬영된 후, 복수의 약포(110) 중 다음 약포가 촬영지점으로 이동할 수 있다. 각 약포에 대한 검수 결과는 사용자에게 합격 판정 또는 불합격 판정 형태로 제공될 수 있다. 약포 검수 결과는 시각적, 음향적, 촉각적 등의 형태로 제공될 수 있다.
일 실시예에 따르면, 제어부(140)는 객체 인식 모델을 이용하여 제1 이미지에 대한 객체 인식을 수행함으로써 제1 인식 결과를 생성할 수 있다. 유사하게, 제어부(140)는 객체 인식 모델을 이용하여 제2 이미지에 대한 객체 인식을 수행함으로써 제2 인식 결과를 생성할 수 있다. 그 후, 제어부(140)는 제1 카메라(120) 및 제2 카메라(130)와 연관된 캘리브레이션 파라미터를 이용하여 제2 인식 결과를 보정할 수 있다. 제어부(140)는 제1 인식 결과 및 보정된 제2 인식 결과를 병합하여 제3 인식 결과를 생성할 수 있다. 그 후, 제어부(140)는 제3 인식 결과 중 적어도 일부 및 약 정보 중 적어도 일부를 비교하여 약포를 검수할 수 있다.
일 실시예에 따르면, 제어부(140)는 객체 인식 모델을 이용하여 제1 이미지에 대한 객체 인식을 수행함으로써 제1 인식 결과를 생성할 수 있다. 제어부(140)는 제1 카메라(120) 및 제2 카메라(130)와 연관된 캘리브레이션 파라미터를 이용하여 제2 이미지를 변환하여 제3 이미지를 생성할 수 있다. 그 후, 제어부(140)는 객체 인식 모델을 이용하여 제3 이미지에 대한 객체 인식을 수행함으로써 제2 인식 결과를 생성할 수 있다. 제어부(140)는 제1 인식 결과 및 제2 인식 결과를 병합하여 제3 인식 결과를 생성할 수 있다.
제어부(140)는 제3 인식 결과 및 약 정보를 기초로 약포(112)를 검수할 수 있다. 예를 들어, 제3 인식 결과 중 적어도 일부 및 약 정보 중 적어도 일부가 불일치하는 경우, 불합격 신호를 출력할 수 있다. 다른 예로, 제3 인식 결과 중 일부와 약 정보 중 일부를 비교한 결과, 불일치 정보가 없으면 합격 신호를 출력할 수 있다. 제3 인식 결과 및 약 정보를 기초로 약포(112)를 검수하는 상세한 방법에 대해서는 후술한다.
이러한 구성에 의해, 포장지 내의 협소한 공간에서 발생할 수 있는 객체의 가림/겹침 현상(Occlusion)에 의해 단일 촬영 장비로 정확한 객체 인식/검수가 어렵다는 문제를 해결할 수 있다. 또한, 약은 양측면에 각인이 있어 약의 각인이 약을 식별하는데 중요한 요소임에도 불구하고, 뒤집어져 있는 경우 구분이 어려운 문제를 해결할 수 있다. 본 개시에 따른 다면 촬영 장치를 이용하여, 약포에 대한 다면 이미지를 획득하여 알약을 인식하고, 알약의 개수, 형태 및 종류를 다면에 대해 각각 생성할 수 있다. 그 후, 하나의 결과로 병합하여 약 정보와 일치하는지 여부를 출력하여 조제 검수 시 소요되는 시간과 비용을 크게 절감하면서 높은 검수 정확도를 제공할 수 있다.
도 2는 본 개시의 일 실시예에 따른 정보 처리 시스템(230), 약포 검수 장치(240) 및 복수의 사용자 단말(210_1, 210_2, 210_3) 사이의 통신 가능하도록 연결된 구성을 나타내는 개요도이다. 도시된 바와 같이, 복수의 사용자 단말(210_1, 210_2, 210_3)은 네트워크(220)를 통해 약포 검수 서비스를 제공할 수 있는 정보 처리 시스템(230) 및 약포 검수 장치(240)와 연결될 수 있다. 여기서, 복수의 사용자 단말(210_1, 210_2, 210_3)은 약포 검수 서비스를 제공받는 사용자의 단말을 포함할 수 있다.
일 실시예에 따르면, 정보 처리 시스템(230)은 약포 검수 서비스 제공 등과 연관된 컴퓨터 실행 가능한 프로그램(예를 들어, 다운로드 가능한 애플리케이션) 및 데이터를 저장, 제공 및 실행할 수 있는 하나 이상의 서버 장치 및/또는 데이터베이스, 또는 클라우드 컴퓨팅 서비스 기반의 하나 이상의 분산 컴퓨팅 장치 및/또는 분산 데이터베이스를 포함할 수 있다.
정보 처리 시스템(230)에 의해 제공되는 약포 검수 서비스는 복수의 사용자 단말(210_1, 210_2, 210_3) 각각에 설치된 약포 검수 애플리케이션 등을 통해 사용자에게 제공될 수 있다. 예를 들어, 정보 처리 시스템(230)은 약포 검수 애플리케이션 등을 통해 사용자 단말(210_1, 210_2, 210_3) 및/또는 약포 검수 장치(240)로부터 수신되는 약포 검수와 연관된 정보를 제공하거나 대응하는 처리를 수행할 수 있다.
일 실시예에 따르면, 정보 처리 시스템(230)은 촬영된 이미지 및 약포와 연관된 약 정보를 기초로 약포를 검수할 수 있다. 정보 처리 시스템(230)은 약포 검수 결과를 사용자 단말(210_1, 210_2, 210_3) 및/또는 약포 검수 장치(240)로 제공할 수 있다.
복수의 사용자 단말(210_1, 210_2, 210_3)은 네트워크(220)를 통해 정보 처리 시스템(230) 및 약포 검수 장치(240)와 통신할 수 있다. 네트워크(220)는 복수의 사용자 단말(210_1, 210_2, 210_3), 정보 처리 시스템(230) 및 약포 검수 장치(240) 사이의 통신이 가능하도록 구성될 수 있다. 네트워크(220)는 설치 환경에 따라, 예를 들어, 이더넷(Ethernet), 유선 홈 네트워크(Power Line Communication), 전화선 통신 장치 및 RS-serial 통신 등의 유선 네트워크, 이동통신망, WLAN(Wireless LAN), Wi-Fi, Bluetooth 및 ZigBee 등과 같은 무선 네트워크 또는 그 조합으로 구성될 수 있다. 통신 방식은 제한되지 않으며, 네트워크(220)가 포함할 수 있는 통신망(일례로, 이동통신망, 유선 인터넷, 무선 인터넷, 방송망, 위성망 등)을 활용하는 통신 방식뿐만 아니라 사용자 단말(210_1, 210_2, 210_3) 사이의 근거리 무선 통신 역시 포함될 수 있다.
도 2에서 휴대폰 단말(210_1), 태블릿 단말(210_2) 및 PC 단말 (210_3)이 사용자 단말의 예로서 도시되었으나, 이에 한정되지 않으며, 사용자 단말(210_1, 210_2, 210_3)은 유선 및/또는 무선 통신이 가능하고 인스턴트 메시징 애플리케이션 또는 웹 브라우저 등이 설치되어 실행될 수 있는 임의의 컴퓨팅 장치일 수 있다. 예를 들어, 사용자 단말은, AI 스피커, 스마트폰, 휴대폰, 내비게이션, 컴퓨터, 노트북, 디지털방송용 단말, PDA(Personal Digital Assistants), PMP(Portable Multimedia Player), 태블릿 PC, 게임 콘솔(game console), 웨어러블 디바이스(wearable device), IoT(internet of things) 디바이스, VR(virtual reality) 디바이스, AR(augmented reality) 디바이스, 셋톱 박스 등을 포함할 수 있다. 또한, 도 2에는 3개의 사용자 단말(210_1, 210_2, 210_3)이 네트워크(220)를 통해 정보 처리 시스템(230) 및 약포 검수 장치(240)와 통신하는 것으로 도시되어 있으나, 이에 한정되지 않으며, 상이한 수의 사용자 단말이 네트워크(220)를 통해 정보 처리 시스템(230) 및 약포 검수 장치(240)와 통신하도록 구성될 수도 있다.
도 2에서는 약포 검수 장치(240)가 약포 이미지 등을 정보 처리 시스템(230)으로 전송하고, 정보 처리 시스템(230)이 약포에 대한 검수를 수행하는 것으로 도시되었으나, 이에 한정되지 않는다. 예를 들어, 약포 검수 장치(240)가 정보 처리 시스템(230)과 통신하지 않고, 독립형 장치(stand-alone device)로서 이미지 촬영과 약포 검수를 모두 수행한 후, 검수 결과를 복수의 사용자 단말(210_1, 210_2, 210_3)에 직접 제공할 수 있다.
도 3은 본 개시의 일 실시예에 따른 사용자 단말 및 정보 처리 시스템의 내부 구성을 나타내는 블록도이다. 사용자 단말(210)은 약포 검수 애플리케이션 등을 실행 가능하고 유/무선 통신이 가능한 임의의 컴퓨팅 장치를 지칭할 수 있으며, 예를 들어, 도 2의 휴대폰 단말(210_1), 태블릿 단말(210_2), PC 단말(210_3) 등을 포함할 수 있다. 도시된 바와 같이, 사용자 단말(210)은 메모리(312), 프로세서(314), 통신 모듈(316) 및 입출력 인터페이스(318)를 포함할 수 있다. 이와 유사하게, 정보 처리 시스템(230)은 메모리(332), 프로세서(334), 통신 모듈(336) 및 입출력 인터페이스(338)를 포함할 수 있다. 도 3에 도시된 바와 같이, 사용자 단말(210) 및 정보 처리 시스템(230)은 각각의 통신 모듈(316, 336)을 이용하여 네트워크(220)를 통해 정보 및/또는 데이터를 통신할 수 있도록 구성될 수 있다. 또한, 입출력 장치(320)는 입출력 인터페이스(318)를 통해 사용자 단말(210)에 정보 및/또는 데이터를 입력하거나 사용자 단말(210)로부터 생성된 정보 및/또는 데이터를 출력하도록 구성될 수 있다.
메모리(312, 332)는 비-일시적인 임의의 컴퓨터 판독 가능한 기록매체를 포함할 수 있다. 일 실시예에 따르면, 메모리(312, 332)는 ROM(read only memory), 디스크 드라이브, SSD(solid state drive), 플래시 메모리(flash memory) 등과 같은 비소멸성 대용량 저장 장치(permanent mass storage device)를 포함할 수 있다. 다른 예로서, ROM, SSD, 플래시 메모리, 디스크 드라이브 등과 같은 비소멸성 대용량 저장 장치는 메모리와는 구분되는 별도의 영구 저장 장치로서 사용자 단말(210) 또는 정보 처리 시스템(230)에 포함될 수 있다. 또한, 메모리(312, 332)에는 운영체제와 적어도 하나의 프로그램 코드(예를 들어, 사용자 단말(210)에 설치되어 구동되는 약포 검수 애플리케이션 등을 위한 코드)가 저장될 수 있다.
이러한 소프트웨어 구성요소들은 메모리(312, 332)와는 별도의 컴퓨터에서 판독가능한 기록매체로부터 로딩될 수 있다. 이러한 별도의 컴퓨터에서 판독가능한 기록매체는 이러한 사용자 단말(210) 및 정보 처리 시스템(230)에 직접 연결가능한 기록 매체를 포함할 수 있는데, 예를 들어, 플로피 드라이브, 디스크, 테이프, DVD/CD-ROM 드라이브, 메모리 카드 등의 컴퓨터에서 판독 가능한 기록매체를 포함할 수 있다. 다른 예로서, 소프트웨어 구성요소들은 컴퓨터에서 판독 가능한 기록매체가 아닌 통신 모듈을 통해 메모리(312, 332)에 로딩될 수도 있다. 예를 들어, 적어도 하나의 프로그램은 개발자들 또는 애플리케이션의 설치 파일을 배포하는 파일 배포 시스템이 네트워크(220)를 통해 제공하는 파일들에 의해 설치되는 컴퓨터 프로그램에 기반하여 메모리(312, 332)에 로딩될 수 있다.
프로세서(314, 334)는 기본적인 산술, 로직 및 입출력 연산을 수행함으로써, 컴퓨터 프로그램의 명령을 처리하도록 구성될 수 있다. 명령은 메모리(312, 332) 또는 통신 모듈(316, 336)에 의해 프로세서(314, 334)로 제공될 수 있다. 예를 들어, 프로세서(314, 334)는 메모리(312, 332)와 같은 기록 장치에 저장된 프로그램 코드에 따라 수신되는 명령을 실행하도록 구성될 수 있다.
통신 모듈(316, 336)은 네트워크(220)를 통해 사용자 단말(210)과 정보 처리 시스템(230)이 서로 통신하기 위한 구성 또는 기능을 제공할 수 있으며, 사용자 단말(210) 및/또는 정보 처리 시스템(230)이 다른 사용자 단말 또는 다른 시스템(일례로 별도의 클라우드 시스템 등)과 통신하기 위한 구성 또는 기능을 제공할 수 있다. 일례로, 사용자 단말(210)의 프로세서(314)가 메모리(312) 등과 같은 기록 장치에 저장된 프로그램 코드에 따라 생성한 요청 또는 데이터(예를 들어, 약포와 연관된 약 정보, 촬영된 약포 이미지, 인식 결과 등)는 통신 모듈(316)의 제어에 따라 네트워크(220)를 통해 정보 처리 시스템(230)으로 전달될 수 있다. 역으로, 정보 처리 시스템(230)의 프로세서(334)의 제어에 따라 제공되는 제어 신호나 명령이 통신 모듈(336)과 네트워크(220)를 거쳐 사용자 단말(210)의 통신 모듈(316)을 통해 사용자 단말(210)에 수신될 수 있다. 예를 들어, 사용자 단말(210)은 정보 처리 시스템(230)으로부터 약포와 연관된 약 정보, 촬영된 약포 이미지, 인식 결과 등을 수신할 수 있다.
입출력 인터페이스(318)는 입출력 장치(320)와의 인터페이스를 위한 수단일 수 있다. 일 예로서, 입력 장치는 오디오 센서 및/또는 이미지 센서를 포함한 카메라, 키보드, 마이크로폰, 마우스 등의 장치를, 그리고 출력 장치는 디스플레이, 스피커, 햅틱 피드백 디바이스(haptic feedback device) 등과 같은 장치를 포함할 수 있다. 다른 예로, 입출력 인터페이스(318)는 터치스크린 등과 같이 입력과 출력을 수행하기 위한 구성 또는 기능이 하나로 통합된 장치와의 인터페이스를 위한 수단일 수 있다. 예를 들어, 사용자 단말(210)의 프로세서(314)가 메모리(312)에 로딩된 컴퓨터 프로그램의 명령을 처리함에 있어서 정보 처리 시스템(230)이나 다른 사용자 단말이 제공하는 정보 및/또는 데이터를 이용하여 구성되는 서비스 화면 등이 입출력 인터페이스(318)를 통해 디스플레이에 표시될 수 있다. 도 3에서는 입출력 장치(320)가 사용자 단말(210)에 포함되지 않도록 도시되어 있으나, 이에 한정되지 않으며, 사용자 단말(210)과 하나의 장치로 구성될 수 있다. 또한, 정보 처리 시스템(230)의 입출력 인터페이스(338)는 정보 처리 시스템(230)과 연결되거나 정보 처리 시스템(230)이 포함할 수 있는 입력 또는 출력을 위한 장치(미도시)와의 인터페이스를 위한 수단일 수 있다. 도 3에서는 입출력 인터페이스(318, 338)가 프로세서(314, 334)와 별도로 구성된 요소로서 도시되었으나, 이에 한정되지 않으며, 입출력 인터페이스(318, 338)가 프로세서(314, 334)에 포함되도록 구성될 수 있다.
사용자 단말(210) 및 정보 처리 시스템(230)은 도 3의 구성요소들보다 더 많은 구성요소들을 포함할 수 있다. 그러나, 대부분의 종래기술적 구성요소들을 명확하게 도시할 필요성은 없다. 일 실시예에 따르면, 사용자 단말(210)은 상술된 입출력 장치(320) 중 적어도 일부를 포함하도록 구현될 수 있다. 또한, 사용자 단말(210)은 트랜시버(transceiver), GPS(Global Positioning system) 모듈, 카메라, 각종 센서, 데이터베이스 등과 같은 다른 구성요소들을 더 포함할 수 있다. 예를 들어, 사용자 단말(210)이 스마트폰인 경우, 일반적으로 스마트폰이 포함하고 있는 구성요소를 포함할 수 있으며, 예를 들어, 가속도 센서, 자이로 센서, 이미지 센서, 근접 센서, 터치 센서, 조도 센서, 카메라 모듈, 각종 물리적인 버튼, 터치패널을 이용한 버튼, 입출력 포트, 진동을 위한 진동기 등의 다양한 구성요소들이 사용자 단말(210)에 더 포함되도록 구현될 수 있다.
약포 검수 애플리케이션 등을 위한 프로그램이 동작되는 동안에, 프로세서(314)는 입출력 인터페이스(318)와 연결된 터치 스크린, 키보드, 오디오 센서 및/또는 이미지 센서를 포함한 카메라, 마이크로폰 등의 입력 장치를 통해 입력되거나 선택된 텍스트, 이미지, 영상, 음성 및/또는 동작 등을 수신할 수 있으며, 수신된 텍스트, 이미지, 영상, 음성 및/또는 동작 등을 메모리(312)에 저장하거나 통신 모듈(316) 및 네트워크(220)를 통해 정보 처리 시스템(230)에 제공할 수 있다.
사용자 단말(210)의 프로세서(314)는 입출력 장치(320), 다른 사용자 단말, 정보 처리 시스템(230) 및/또는 복수의 외부 시스템으로부터 수신된 정보 및/또는 데이터를 관리, 처리 및/또는 저장하도록 구성될 수 있다. 프로세서(314)에 의해 처리된 정보 및/또는 데이터는 통신 모듈(316) 및 네트워크(220)를 통해 정보 처리 시스템(230)에 제공될 수 있다. 사용자 단말(210)의 프로세서(314)는 입출력 인터페이스(318)를 통해 입출력 장치(320)로 정보 및/또는 데이터를 전송하여, 출력할 수 있다. 예를 들어, 프로세서(314)는 수신한 정보 및/또는 데이터를 사용자 단말(210)의 화면에 디스플레이할 수 있다.
정보 처리 시스템(230)의 프로세서(334)는 복수의 사용자 단말(210) 및/또는 복수의 외부 시스템으로부터 수신된 정보 및/또는 데이터를 관리, 처리 및/또는 저장하도록 구성될 수 있다. 프로세서(334)에 의해 처리된 정보 및/또는 데이터는 통신 모듈(336) 및 네트워크(220)를 통해 사용자 단말(210)에 제공할 수 있다.
도 4는 본 개시의 일 실시예에 따른 약포(416)를 제1 카메라(412) 및 제2 카메라(414)를 이용하여 촬영하는 모습의 예시를 나타내는 도면이다. 도시된 것과 같이, 제1 카메라(412)는 약포(416)의 제1 면을 촬영하고, 제2 카메라(414)는 약포(416)의 제2 면을 촬영할 수 있다. 이 때, 제1 면은 약포(416)의 앞면일 수 있고, 제2 면은 약포(416)의 뒷면일 수 있으나, 이에 한정되지 않으며 제1 면 또는 제2 면은 약포의 복수의 면 중 하나일 수 있다. 제1 카메라(412)에 의해 촬영된 제1 이미지 및 제2 카메라(414)에 의해 촬영된 제2 이미지는 같은 크기(예를 들어, 720x720px)의 이미지일 수 있다. 도 4에서는 2개의 카메라(412, 414)를 도시하고 있으나, 3개 이상의 카메라가 사용될 수 있다.
일 실시예에 따라 제1 카메라(412) 및 제2 카메라(414)가 약포(416)를 촬영하는 모습을 x축 방향에서 바라본 사시도(410)를 참조하면, 제1 카메라(412) 및 약포(416) 사이의 거리는 d1이고, 제2 카메라(414) 및 약포(416) 사이의 거리는 d2일 수 있다. 여기서, d1 및 d2는 약포 검수 장치 제조시의 공차, 설치 시의 오차, 온도 등의 변화에 따라 상이할 수 있다. 따라서, 제1 카메라(412)에 의해 촬영된 이미지 내의 약포(416) 및 알약(M1, M2, M3)의 크기가 제2 카메라(414)에 의해 촬영된 이미지 내의 약포(416) 및 알약(M1, M2, M3)의 크기와 상이할 수 있다.
일 실시예에 따라 제1 카메라(412) 및 제2 카메라(414)가 약포(416)를 촬영하는 모습을 z축 방향에서 바라본 측면도(420)를 참조하면, 제1 카메라(412)와 제2 카메라(414)의 중심은 서로 상이할 수 있다. 또한, 제1 카메라(412)가 약포(416)를 바라보는 각도와 제2 카메라(414)가 약포(416)를 바라보는 각도가 서로 상이할 수 있다.
앞서 설명한 것과 같이, 약포를 촬영하는 제1 카메라의 위치 및 거리(d1)와 제2 카메라의 위치 및 거리(d2)가 서로 상이할 수 있다. 이로 인해, 동일한 알약을 제1 카메라(412) 및 제2 카메라(414)로 각각 촬영한 경우, 제1 카메라(412)에 의해 촬영된 제1 이미지에서의 알약의 크기와 위치가 제2 카메라(414)에 의해 촬영된 제2 이미지에서의 알약의 크기와 위치가 서로 상이할 수 있다. 제1 이미지와 제2 이미지에서의 객체 인식 결과를 병합하기 위해, 제1 카메라(412) 및 제2 카메라(414)와 연관된 캘리브레이션 파라미터를 이용할 수 있다. 제1 이미지와 제2 이미지에서의 객체 인식 결과를 병합하는 과정을 후술한다.
일 실시예에 따르면, 캘리브레이션 파라미터는 변환 매트릭스를 통해 정의될 수 있다. 예를 들어, 변환 매트릭스는 수학식 1로 표현할 수 있다.
이 때, , 는 x축, y축 방향의 스케일 변환 파라미터이며, , 는 x축, y축 방향의 이동(translation) 파라미터를 나타낼 수 있다. 캘리브레이션 파라미터(, , , )는 적어도 하나의 약포를 제1 카메라(412) 및 제2 카메라(414)가 촬영한 복수의 이미지를 기초로 생성/학습될 수 있다. 구체적으로, 제1 카메라(412) 및 제2 카메라(414)에 의해 촬영된 복수의 이미지에 대해 객체 인식 모델을 이용하여 객체 인식을 수행할 수 있다. 인식된 객체 각각에 대해 제1 카메라(412)에 의해 촬영된 이미지 내에서의 객체의 위치 정보(예, 중심 좌표), 너비 정보 및 높이 정보를 제2 카메라(414)에 의해 촬영된 이미지 내에서의 객체의 위치 정보, 너비 정보 및 높이 정보와 비교할 수 있다.
일 실시예에 따르면, , , , 를 훈련가능한 파라미터(Trainable parameters)로 간주하여, 여러 장의 촬영결과를 이용하여, 반복적으로 학습하여, 파라미터를 최적화할 수 있다. 즉, 캘리브레이션 파라미터 생성/학습 과정은 전면 촬영 결과(예를 들어, 제1 이미지)와 후면 촬영 결과(예를 들어, 제2 이미지)에 대한 객체 인식이 올바르게 진행되었다고 간주하고, 후면 촬영 결과의 객체의 바운딩 박스를 전면 촬영 결과의 객체의 바운딩 박스에 매핑하는 과정이라고 할 수 있다. 따라서, 캘리브레이션 파라미터 생성/학습 과정은 여러 장의 영상 결과를 이용하여 매핑 결과가 동일하게 되도록, 변환 매트릭스의 원소를 최적화하는 과정일 수 있다.
캘리브레이션 파라미터는 필요에 따라 생성 또는 재생성될 수 있다. 예를 들어, 캘리브레이션 파라미터는 제1 카메라 및 제2 카메라 설치 직후 생성될 수 있다. 또 다른 예에서, 캘리브레이션 파라미터는 약포 검수 장치 전원을 킬 때마다 생성될 수 있다. 또 다른 예에서, 캘리브레이션 파라미터는 미리 정해진 주기마다(예를 들어, 계절마다) 생성될 수 있다.
캘리브레이션 파라미터를 이용한 맵핑을 다음의 예시를 통해 구체적으로 설명한다. 캘리브레이션 파라미터 생성/학습 과정을 통해 캘리브레이션 파라미터가 하기 수학식 2와 같이 생성된 것으로 가정한다.
도시된 예에서, 약포(416)는 3개의 알약(M1, M2, M3)을 포함될 수 있다. 제1 이미지 내에서 M1의 중심 좌표는 [360,450]이고, M2의 중심 좌표는 [360,360]일 수 있다. 제2 이미지 내에서 M1의 중심 좌표는 [400,430]이고, M2의 중심 좌표는 [397,340]일 수 있다. 캘리브레이션 파라미터를 이용하여 제2 이미지 내의 M1의 중심 좌표 [400,430]와 M2의 중심 좌표 [397,340]를 변환할 수 있다.
제2 이미지 내에서의 M1의 중심 좌표 및 M2의 중심 좌표를 캘리브레이션 파라미터를 이용하여 변환하면 각각 제1 이미지 내에서의 M1의 중심 좌표([360,450]) 및 M2의 중심 좌표([360,360])와 동일해지는 것을 확인할 수 있다. 객체 인식 결과를 캘리브레이션 파라미터를 이용하여 변환함으로써, 다면으로 촬영한 결과를 병합하여 겹침 현상에 따른 가려진 객체를 정상적으로 인식할 수 있다.
도 5는 본 개시의 일 실시예에 따른 객체 인식을 수행하는 과정의 예시를 나타내는 도면이다. 이미지(510)는 적어도 하나의 알약이 포함된 알약을 촬영한 이미지일 수 있다. 예를 들어, 이미지(510)는 약포 검수 장치의 제1 카메라 및 제2 카메라에 의해 촬영된 약포 이미지 중 하나일 수 있다. 또 다른 예로, 이미지(510)는 카메라에 의해 촬영된 약포 이미지를 캘리브레이션 파라미터를 이용하여 보정한 이미지일 수 있다.
객체 인식 모델(520)은 처방전 데이터 없이 이미지(510)에 포함된 적어도 하나의 알약을 객체로 인식하고, 인식 결과(530)를 생성할 수 있다. 예를 들어, 객체 인식 모델(520)은 Retinanet, YOLO, SSD, R-CNN 등일 수 있다. 인식 결과(530)는 객체 인식 모델(520)이 인식한 각 객체에 관한 정보를 포함할 수 있다. 예를 들어, 인식 결과(530)는 특정 객체의 바운딩 박스(bounding box)에 관한 위치 정보, 크기 정보(너비 정보, 높이 정보), 카테고리 정보, 신뢰도 값 등을 포함할 수 있다.
일 실시예에 따르면, 객체 인식 모델(520)은 다양한 의약품 데이터를 학습할 수 있다. 구체적으로, 객체 인식 모델(520)은 알약 종류마다 구분하여 의약품 데이터를 학습할 수 있다. 예를 들어, 의약품 데이터는 각 알약의 이름, 전면 이미지, 후면 이미지, 크기 정보 등을 포함할 수 있다. 객체 인식 모델(520)은 학습된 데이터를 기초로 이미지(510) 내의 알약 객체를 인식할 수 있다. 이 경우, 인식 결과(530)에 포함된 카테고리 정보는 특정 의약품 데이터(예를 들어, 타이레놀정500밀리그람(아세트아미노펜))과 대응될 수 있다.
다른 실시예에 따르면, 객체 인식 모델(520)은 이미지(510)내의 알약 객체가 어떤 의약품인지 특정할 수는 없지만, 이미지(510)내에 포함된 서로 다른 알약 형상을 구분하여 인식할 수 있다. 예를 들어, 이미지(510)내에 원형 형상의 알약, 삼각형 형상의 알약 및 타원형 형상의 알약이 포함된 경우, 인식 결과(530)에 포함된 카테고리 정보는 서로 다른 알약 형상 중 하나에 대응될 수 있다. 이 경우, 이미지(510) 내의 원형 형상의 알약 객체는 카테고리 정보 "class 1"으로 인식되고, 삼각형 형상의 알약 객체는 카테고리 정보 "class 2"로 인식되고, 타원형 형상의 알약 객체는 카테고리 정보 "class 3"로 인식될 수 있다.
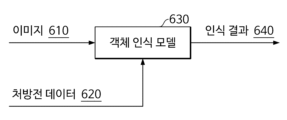
도 6은 본 개시의 일 실시예에 따른 처방전 데이터(620)를 이용하여 객체 인식을 수행하는 일 예시를 나타내는 도면이다. 객체 인식 모델(630)은 이미지(610) 및 처방전 데이터(620)를 기초로 인식 결과(640)를 생성할 수 있다. 구체적으로, 객체 인식 모델(630)은 객체의 위치, 형상, 모양, 크기 등을 인식하고, 인식된 각 객체에 처방전 데이터(620)에 포함된 약 종류 중 하나를 카테고리 정보로 부여할 수 있다. 즉, 객체 인식 모델(630)은 이미지(610) 내에 포함된 객체를 검출하고, 검출된 객체가 처방전 데이터(620)에 포함된 약 종류 중 어느 것에 해당하는지 식별/인식할 수 있다.
객체 인식 모델(630)은 처방전 데이터(620)를 이용하여 이미지(610)에 포함된 적어도 하나의 알약을 객체로 인식하도록 학습될 수 있다. 인식 결과(640)는 객체 인식 모델(630)이 인식한 각 객체에 관한 정보를 포함할 수 있다. 예를 들어, 인식 결과(640)는 특정 객체의 바운딩 박스(bounding box)에 관한 위치 정보, 크기 정보(너비 정보, 높이 정보), 카테고리 정보(예를 들어, 처방전 데이터(620)에 포함된 1번 알약), 신뢰도 값 등을 포함할 수 있다.
도 7은 보정된 제2 인식 결과(730)와 제1 인식 결과(710)의 비교를 나타내는 일 예시를 나타내는 도면이다. 일 실시예에 따라 제1 이미지에 대해 객체 인식 모델을 이용하여 객체 인식이 수행된 제1 인식 결과(710)를 참조하면, 제1 이미지 내의 4개의 알약이 제1 세트의 객체(712)로 인식될 수 있다. 도시된 것과 같이, 제1 이미지는 약포의 전면을 촬영한 이미지일 수 있다. 인식된 알약은 제1 이미지 상에 바운딩 박스로 표시될 수 있으며, 바운딩 박스 내의 원은 해당 바운딩 박스의 중심을 나타낼 수 있다. 제1 인식 결과(710)는 제1 세트의 객체(712)에 대한 각각의 정보를 포함할 수 있다. 예를 들어, 제1 인식 결과(710)는 제1 세트의 객체(712) 각각에 대한 위치 정보(예, 중심 좌표), 카테고리 정보, 크기 정보(예, 너비 정보, 높이 정보), 신뢰도 값 등을 포함할 수 있다.
이와 유사하게, 제2 이미지에 대해 객체 인식 모델을 이용하여 객체 인식이 수행된 제2 인식 결과(720)를 참조하면, 제2 이미지 내의 4개의 알약이 제2 세트의 객체(722)로 인식될 수 있다. 도시된 것과 같이, 제2 이미지는 제1 이미지와 동일한 약포의 후면을 촬영한 이미지일 수 있다. 제2 인식 결과(720)는 제2 세트의 객체(722)에 대한 각각의 정보를 포함할 수 있다. 예를 들어, 제2 인식 결과(720)는 제2 세트의 객체(722) 각각에 대한 위치 정보(예, 중심 좌표), 카테고리 정보, 크기 정보(예, 너비 정보, 높이 정보), 신뢰도 값 등을 포함할 수 있다.
제1 인식 결과(710)와 제2 인식 결과(720)는 촬영된 이미지 상에 검출된 객체를 바운딩 박스로 표시한 형태로 도시되었으나, 이에 한정되지 않는다. 예를 들어, 인식 결과는 이미지 없이 검출된 객체 각각에 대한 정보만 포함할 수 있다.
일 실시예에 따르면, 제2 인식 결과(720)를 캘리브레이션 파라미터를 이용하여 보정함으로써, 보정된 제2 인식 결과(730)가 생성될 수 있다. 여기서, 캘리브레이션 파라미터는 제2 인식 결과(720)에 포함된 제2 세트의 객체(722)의 위치 정보, 너비 정보 및 높이 정보를 제1 이미지와 대응되도록 보정/매핑하는데 이용될 수 있다. 이 때, 제2 인식 결과(730)에 포함된 카테고리 정보 및 신뢰도 정보는 보정되지 않고, 보정된 제2 인식 결과(730)에 그대로 포함될 수 있다. 보정된 제2 인식 결과(730)는 보정된 제2 세트의 객체(722)에 관한 정보를 포함할 수 있다. 도시된 바와 같이, 제2 이미지 상에 표시된 보정된 제2 세트의 객체(732)는 제2 이미지 내의 알약의 위치가 아닌, 제1 이미지 내의 알약의 위치와 대응되는 위치로 이동된 상태일 수 있다.
보정된 제2 인식 결과(730)에 포함된 보정된 제2 세트의 객체(732)에 관한 보정된 위치 정보, 보정된 너비 정보, 보정된 높이 정보, 카테고리 정보 및 신뢰도 정보는 제1 인식 결과(710)에 포함된 제1 세트의 객체(712)에 관한 위치 정보, 너비 정보, 높이 정보, 카테고리 정보 및 신뢰도 정보와 비교될 수 있다. 이러한 비교 과정을 통해 보정된 제2 인식 결과(730)와 제1 인식 결과(710)를 병합하여 제3 인식 결과가 생성될 수 있다. 보정된 제2 인식 결과(730)와 제1 인식 결과(710)를 병합하는 자세한 과정은 후술한다.
도 8은 본 개시의 일 실시예에 따른 이미지(810, 820)와 약 정보(862)를 기초로 검수 결과(864)를 생성하는 예시를 나타내는 도면이다. 제1 인식 결과(832)는 제1 이미지(810)에 대해 객체 인식 모델(830)을 이용하여 객체 인식이 수행된 결과로서 생성될 수 있다. 여기서, 제1 이미지(810)는 제1 카메라를 이용하여 약포의 제1 면을 촬영한 이미지일 수 있다. 제1 인식 결과(832)는 객체 인식 모델(830)에 의해 인식된 각 객체에 대한 위치 정보, 너비 정보, 크기 정보, 카테고리 정보, 신뢰도 값 등을 포함할 수 있다.
유사하게, 제2 인식 결과(834)는 제2 이미지(820)에 대해 객체 인식 모델(830)을 이용하여 객체 인식이 수행된 결과일 수 있다. 여기서, 제2 이미지(820)는 제2 카메라를 이용하여 약포의 제2 면을 촬영한 이미지일 수 있다. 제2 인식 결과(834)는 객체 인식 모델(830)에 의해 인식된 객체에 대한 위치 정보, 너비 정보, 크기 정보, 카테고리 정보, 신뢰도 값 등을 포함할 수 있다.
일 실시예에 따르면, 객체 인식 모델(830)은 추가 정보 없이 각 이미지(810, 820)에 대한 객체 인식을 수행하여 인식 결과(832, 834)를 생성할 수 있다. 대안적으로, 객체 인식 모델(830)은 처방전 데이터(미도시)를 기초로 각 이미지(810, 820)에 대한 객체 인식을 수행하여 인식 결과(832, 834)를 생성할 수 있다. 이 경우, 인식 결과(832, 834)는 처방전 데이터에 포함된 약 종류 중 하나를 카테고리 정보로 포함할 수 있다.
일 실시예에 따르면, 캘리브레이션 파라미터(842)를 이용하여 제2 인식 결과(834)를 보정함으로써 보정된 제2 인식 결과(844)가 생성될 수 있다. 구체적으로, 보정된 제2 인식 결과(844)는 제2 인식 결과(834)에 포함된 객체에 관한 위치 정보, 너비 정보 및/또는 높이 정보를 캘리브레이션 파라미터(842)를 이용하여 보정한 정보를 포함할 수 있다. 이 때, 제2 인식 결과(834)에 포함된 카테고리 정보 및 신뢰도 정보는 보정되지 않고, 보정된 제2 인식 결과(844)에 그대로 포함될 수 있다. 이러한 캘리브레이션 파라미터(842)를 이용하여 보정을 통해, 제1 인식 결과(832)와 제2 인식 결과(834)에 대한 비교가 가능해질 수 있다.
인식 결과 병합부(850)는 제1 인식 결과(832)와 보정된 제2 인식 결과(844)를 병합하여 제3 인식 결과(852)를 생성할 수 있다. 구체적으로, 인식 결과 병합부(850)는 보정된 제2 인식 결과(844)에 포함된 객체의 바운딩 박스를 제1 인식 결과(832)에 포함된 객체의 바운딩 박스와 비교할 수 있다. 그 후, 인식 결과 병합부(850)는 제1 인식 결과(832)에 포함된 적어도 하나의 객체와 보정된 제2 인식 결과(844)에 포함된 적어도 하나의 객체를 병합(합집합, 교집합 등)할 수 있다. 제3 인식 결과(852)는 적어도 하나의 객체에 관한 위치 정보, 너비 정보, 높이 정보, 카테고리 정보, 신뢰도 값 등을 포함할 수 있다. 병합하는 과정의 예시에 대해서는 도 9 내지 도 11에서 구체적으로 서술한다.
검수부(860)는 제3 인식 결과(852)와 약 정보(862)를 비교하여 약포 검수 결과(864)를 생성할 수 있다. 각 약포에 대한 검수 결과(864)는 사용자에게 합격 판정 또는 불합격 판정 형태로 제공될 수 있다. 불합격 판정의 경우, 불합격 판정에 대한 구체적인 이유(예를 들어, 일부 약품 누락, 일부 약품 초과 포장, 다른 약품 포장 등)는 검수 결과(864)에 포함될 수 있다. 약포 검수 결과(864)는 시각적, 음향적, 촉각적 등의 형태로 제공될 수 있다.
일 실시예에 따르면, 약 정보(862)는 처방전 데이터일 수 있다. 구체적으로, 처방전 데이터는 하나의 약포에 포장되어야 하는 약의 종류(즉, 카테고리 정보)와 각 약 종류 별 개수 정보를 포함할 수 있다. 이 경우, 제3 인식 결과(852) 내의 객체들에 관한 카테고리 정보는 약 정보(862)에 포함된 카테고리 정보(예, 약 종류)와 비교될 수 있다. 비교 결과, 제3 인식 결과(852) 내의 객체들에 관한 카테고리 정보 및 개수와 약 정보(862)에 포함된 카테고리 정보(예, 약 종류) 및 개수가 일치하지 않는 경우, 검수부(860)는 해당 약포에 대해 불합격 판정할 수 있다. 반대로, 제3 인식 결과(852) 내의 객체들에 관한 카테고리 정보 및 개수와 약 정보(862)에 포함된 카테고리 정보(예, 약 종류) 및 개수가 일치하는 경우, 검수부(860)는 해당 약포에 대해 합격 판정할 수 있다.
다른 실시예에 따르면, 약 정보(862)는 미리 정해진 약 개수 패턴을 포함할 수 있다. 여기서, 약 개수 패턴은 복수의 약포 내에 포함된 알약의 개수를 일관성 있게 또는 특징적으로 배열한 정보를 지칭할 수 있다. 약 개수 패턴은 사용자에 의해 입력되거나, 처방전 데이터를 기초로 결정되거나 및/또는 약포 검수 장치에 의해 생성될 수 있다. 이 경우, 검수부(860)는 제3 인식 결과(852)에 포함된 카테고리 정보를 이용하지 않고, 객체의 수를 약 개수 패턴과 비교하여 약포 검수 결과(864)를 생성할 수 있다. 예를 들어, 약 개수 패턴이 3-2-1이고, 검수부(860)가 현재 검수하는 약포가 약 개수 패턴 중 "2"에 해당하는 순서이며, 제3 인식 결과(852)에 포함된 객체의 수가 2개인 경우, 검수부(860)는 해당 약포에 대해 합격 판정할 수 있다. 반대로, 검수부(860)는 제3 인식 결과(852)에 포함된 객체의 수가 2개가 아닌 경우, 해당 약포에 대해 불합격 판정할 수 있다.
일 실시예에 따르면, 검수부(860)가 생성한 검수 결과(864)는 사용자에게 제공될 수 있다. 예를 들어, 검수 결과(864)는 약포 검수 장치에 장착된 디스플레이 상에 표시될 수 있다. 추가적으로 또는 대안적으로, 검수 결과(864)는 휴대폰, 스마트 워치 등과 같은 사용자 단말에 표시될 수 있다.
도 8에서는 제2 인식 결과(834)가 캘리브레이션 파라미터(842)를 사용하여 보정되는 것으로 도시되었으나, 이에 한정되지 않는다. 예를 들어, 제2 이미지(820)를 캘리브레이션 파라미터(842)를 이용하여 변환함으로써 제3 이미지(미도시)를 생성할 수 있다. 이 경우, 캘리브레이션 파라미터(842)를 이용하여 이미지 내의 각 픽셀의 정보가 변환될 수 있다. 그 후, 제3 이미지에 대해 객체 인식 모델(830)을 이용하여 객체 인식이 수행됨으로써 제2 인식 결과가 생성될 수 있다. 그런 다음, 인식 결과 병합부(850)는 제1 인식 결과와 제2 인식 결과를 병합하여 제3 인식 결과를 생성하고, 검수부(860)가 제3 인식 결과 및 약 정보(862)에 기초하여 검수 결과를 생성할 수 있다.
도 9는 약포 내부 알약이 겹쳐 있는 경우, 인식 결과 병합 과정의 예시를 나타내는 도면이다. 앞서 설명한 것과 같이, 제1 카메라에 의해 촬영된 제1 이미지(예를 들어, 약포 앞면 이미지)에 대해 객체 인식을 수행함으로써, 제1 인식 결과(910)가 생성될 수 있다. 유사하게, 제2 카메라에 의해 촬영된 제2 이미지(예를 들어, 약포 뒷면 이미지)에 대해 객체 인식을 수행함으로써, 제2 인식 결과(920)가 생성될 수 있다. 그 후, 제2 인식 결과(920)를 보정하여 보정된 제2 인식 결과를 생성하고, 제1 인식 결과(910)와 보정된 제2 인식 결과를 병합함으로써, 제3 인식 결과(930)가 생성될 수 있다.
도시된 바와 같이, 제1 인식 결과(910)는 제1 세트의 객체(,)에 관한 정보를 포함할 수 있다. 예를 들어, 제1 인식 결과(910)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class B), 신뢰도 값 등을 포함할 수 있다. 추가적으로, 제1 인식 결과(910)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class A), 신뢰도 값 등을 포함할 수 있다. 제1 인식 결과(910)의 예시는 아래 표 1과 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
| 제1 인식 결과 |
|
[360, 450] |
B |
0.9 |
| 제1 인식 결과 |
|
[360, 360] |
A |
0.8 |
제2 인식 결과(920)는 제2 세트의 객체(,,)에 관한 정보를 포함할 수 있다. 예를 들어, 제2 인식 결과(920)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class B), 신뢰도 값 등을 포함할 수 있다. 추가적으로, 제2 인식 결과(920)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class A), 신뢰도 값 등을 포함할 수 있다. 추가적으로, 제2 인식 결과(920)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class C), 신뢰도 값 등을 포함할 수 있다. 제2 인식 결과(920)의 예시는 아래 표 2와 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
| 제2 인식 결과 |
|
[400, 430] |
B |
0.5 |
| 제2 인식 결과 |
|
[397, 340] |
A |
0.8 |
| 제2 인식 결과 |
|
[410, 440] |
C |
0.8 |
캘리브레이션 파라미터를 이용하여 제2 인식 결과(920)를 보정함으로써, 보정된 제2 인식 결과(미도시)가 생성될 수 있다. 예를 들어, 캘리브레이션 파라미터는 M= 일 수 있다. 이 때, 제2 인식 결과(920)에 포함된 바운딩 박스에 관한 정보가 보정되고, 카테고리 정보와 신뢰도 값은 보정되지 않을 수 있다. 보정된 제2 인식 결과의 예시는 아래 표 3과 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
| 보정된 제2 인식 결과 |
|
[360, 450] |
B |
0.5 |
| 보정된 제2 인식 결과 |
|
[363, 360] |
A |
0.8 |
| 보정된 제2 인식 결과 |
|
[350, 450] |
C |
0.8 |
제1 인식 결과(910)와 보정된 제2 인식 결과를 비교하고 병합함으로써, 제3 인식 결과(930)가 생성될 수 있다. 제1 인식 결과(910)와 보정된 제2 인식 결과를 비교하는 예시는 아래 표 4와 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
중복 판정 |
| 제1 인식 결과 |
|
[360, 450] |
B |
0.9 |
O |
| 보정된 제2 인식 결과 |
|
[360, 450] |
B |
0.5 |
O |
| 제1 인식 결과 |
|
[360, 360] |
A |
0.8 |
O |
| 보정된 제2 인식 결과 |
|
[363, 360] |
A |
0.8 |
O |
| 제1 인식 결과 |
|
없음 |
없음 |
없음 |
없음 |
| 보정된 제2 인식 결과 |
|
[350, 450] |
C |
0.8 |
X |
일 실시예에 따르면, 인식 결과 비교/병합 과정은 제1 인식 결과(910)에 포함된 제1 객체와 보정된 제2 인식 결과에 포함된 제2 객체의 유사도를 판정하는 과정을 포함할 수 있다. 구체적으로, 인식 결과 병합 과정은 제1 인식 결과(910)의 객체의 바운딩 박스 위치 정보, 너비 정보 및 높이 정보 및 보정된 제2 인식 결과의 객체의 보정된 바운딩 박스의 위치 정보, 너비 정보 및 높이 정보에 기초하여 유사도를 판정하는 과정을 포함할 수 있다.
일 실시예에 따르면, 제1 인식 결과(910)에 포함된 제1 객체의 바운딩 박스와 보정된 제2 인식 결과에 포함된 제2 객체의 보정된 바운딩 박스의 유사도가 미리 정해진 제1 임계치 이상인 경우 제1 객체 및 제2 객체는 동일한 알약과 연관된 중복된 객체로 판정될 수 있다. (이하, '중복 판정'이라 한다.) 여기서, 제1 임계치는 약포 검수 장치 설치 전 및/또는 약포 검수 장치 생산 당시 사전에 입력된 값일 수 있다. 대안적으로, 제1 임계치는 약포 검수 방법 실시 전 입력될 수 있다. 제1 임계치의 입력 방법과 제1 임계치 값은 이에 한정되지 않으며, 다양한 방식으로 결정/적용될 수 있을 것이다.
중복 판정을 받은 제1 객체 및 제2 객체의 경우, 제1 객체의 신뢰도 값은 제2 객체의 신뢰도 값과 비교될 수 있다. 신뢰도 값이 높은 객체의 정보를 제3 인식 결과(930)에 추가하고, 신뢰도 값이 낮은 객체의 정보는 제거되거나 제3 인식 결과(930)에 추가되지 않을 수 있다. 표 4를 참조하여 설명하면, 제1 인식 결과(910)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 의 바운딩 박스의 유사도가 제1 임계치 이상이어서 중복 판정을 받을 수 있다. 즉, 제1 인식 결과(910)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 의 바운딩 박스의 위치 및 크기가 유사한 것으로 판정될 수 있다. 이 경우, 제1 인식 결과(910)에 포함된 의 신뢰도 값은 0.9이고, 보정된 제2 인식 결과에 포함된 의 신뢰도 값은 0.5이므로, 제1 인식 결과(910) 내의 에 관한 정보를 제3 인식 결과(930)에 추가하고, 보정된 제2 인식 결과 내의 에 관한 정보는 제거되거나 제3 인식 결과(930)에 추가되지 않을 수 있다.
또한, 제1 인식 결과(910)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 의 바운딩 박스의 유사도가 제1 임계치 이상이어서 중복 판정을 받을 수 있다. 제1 인식 결과(910) 내의 의 신뢰도 값은 0.8이고, 보정된 제2 인식 결과 내의 의 신뢰도 값은 0.8이므로, 제1 인식 결과(910) 내의 에 대한 정보 또는 보정된 제2 인식 결과 내의 에 대한 정보 중 하나를 제3 인식 결과(930)에 추가하고, 다른 하나는 제거되거나 제3 인식 결과(930)에 추가되지 않을 수 있다.
일 실시예에 따르면, 제1 인식 결과(910)에 포함된 제1 객체의 카테고리 정보와 보정된 제2 인식 결과에 포함된 제2 객체의 카테고리 정보가 서로 상이하고, 제1 객체의 바운딩 박스와 제2 객체의 보정된 바운딩 박스의 유사도가 미리 정해진 제1 임계치 미만이고, 제1 객체의 바운딩 박스와 제2 객체의 바운딩 박스 사이의 겹침 영역이 미리 정해진 제2 임계치 이상인 경우, 제1 객체와 제2 객체는 겹침(Occlusion) 상태에 있는 서로 다른 알약에 관한 객체로 판정될 수 있다. 이 경우, 제1 인식 결과(910) 내의 제1 객체 정보 및 보정된 제2 인식 결과 내의 제2 객체 정보를 모두 제3 인식 결과(930)에 추가할 수 있다.
일 실시예에 따르면, 2개의 바운딩 박스 사이의 겹침 영역은 IoU(Intersection over union), GIoU(Gerneralized-IoU), CIoU (Complete-IoU), DIoU (Distance-IoU) 등의 방식을 이용하여 결정할 수 있다. 제2 임계치는 약포 검수 장치 설치 전 및/또는 약포 검수 장치 생산 당시 사전에 입력된 값일 수 있다. 대안적으로, 제2 임계치는 약포 검수 방법 실시 전 입력될 수 있다. 제2 임계치의 입력 방법은 이에 한정되지 않으며, 다양한 방식으로 결정/적용될 수 있을 것이다.
표 4를 참조하여 설명하면, 제1 인식 결과(910)에 포함된 과 보정된 제2 인식 결과에 포함된 은 각각 카테고리 정보가 B와 C로 서로 상이하고, 제1 인식 결과(910)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 의 바운딩 박스의 유사도가 미리 정해진 제1 임계치 미만이고(즉, 위치와 크기가 비유사), 제1 인식 결과(910)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 의 바운딩 박스의 사이의 겹침 영역이 미리 정해진 제2 임계치 이상인 것으로 판정될 수 있다. 즉, 가 에 의해 겹쳐진 상태로 판정될 수 있다. 이 경우, 제1 인식 결과(910)에 포함된 의 정보와 보정된 제2 인식 결과에 포함된 의 정보가 모두 제3 인식 결과(930)에 추가될 수 있다. 제3 인식 결과(930)의 예시는 아래 표 5와 같다.
| 인식 결과 종류 |
알약 |
좌표정보 |
카테고리 |
신뢰도값 |
| 제3 인식 결과 |
|
[360, 450] |
B |
0.9 |
| 제3 인식 결과 |
|
[363, 360] |
A |
0.8 |
| 제3 인식 결과 |
|
[350, 450] |
C |
0.8 |
이와 같이, 알약이 겹침 상태에 있는 경우, 제1 이미지를 기초로 객체 인식될 수 없던 알약이 제2 이미지를 기초로 객체 인식될 수 있다. 예를 들어, 과 가 겹침 상태인 경우, 제1 이미지로는 를 인식할 수 없어 를 식별할 수 없지만, 제2 이미지로는 를 인식될 수 있어 겹쳐져 있는 알약의 식별이 가능할 수 있다. 즉, 본 개시의 일 실시예 따른 발명은 다면 촬영을 통한 객체 인식을 통해 겹쳐져 있는 알약을 정상적으로 식별할 수 있게 된다.
도 10은 동일한 알약에 관하여 카테고리 정보가 다르게 인식된 경우, 인식 결과 병합 과정의 예시를 나타내는 도면이다. 앞서 설명한 것과 같이, 제1 카메라에 의해 촬영된 제1 이미지(예를 들어, 약포 앞면 이미지)에 대해 객체 인식을 수행함으로써, 제1 인식 결과(1010)가 생성될 수 있다. 유사하게, 제2 카메라에 의해 촬영된 제2 이미지(예를 들어, 약포 뒷면 이미지)에 대해 객체 인식을 수행함으로써, 제2 인식 결과(1020)가 생성될 수 있다. 그 후, 제2 인식 결과(1020)를 보정하여 보정된 제2 인식 결과를 생성하고, 제1 인식 결과(1010)와 보정된 제2 인식 결과를 병합함으로써, 제3 인식 결과(1030)가 생성될 수 있다.
제1 인식 결과(1010), 제2 인식 결과(1020) 및 제3 인식 결과(1030)에서 및 의 인식 결과 및 인식 병합 결과는 도 9와 동일하므로 자세한 설명을 생략한다. 도 10에서는 도 9와 인식 결과가 다른 을 위주로 설명한다.
도시된 바와 같이, 제1 인식 결과(1010)는 에 관한 정보를 포함할 수 있다. 예를 들어, 제1 인식 결과(1010)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class B), 신뢰도 값(0.5) 등을 포함할 수 있다. 제1 인식 결과(1010)의 예시는 아래 표 6과 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
| 제1 인식 결과 |
|
[360, 450] |
B |
0.5 |
제2 인식 결과(1020)는 에 관한 정보를 포함할 수 있다. 예를 들어, 제2 인식 결과(1020)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class D), 신뢰도 값(0.9) 등을 포함할 수 있다. 제2 인식 결과(1020)의 예시는 아래 표 7과 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
| 제2 인식 결과 |
|
[400, 430] |
D |
0.9 |
캘리브레이션 파라미터를 이용하여 제2 인식 결과(1020)를 보정함으로써, 보정된 제2 인식 결과(미도시)가 생성될 수 있다. 예를 들어, 캘리브레이션 파라미터는 M= 일 수 있다. 이 때, 제2 인식 결과(1020)에 포함된 바운딩 박스에 관한 정보가 보정되고, 카테고리 정보와 신뢰도 값은 보정되지 않을 수 있다. 보정된 제2 인식 결과의 예시는 아래 표 8과 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
| 보정된 제2 인식 결과 |
|
[360, 450] |
B |
0.9 |
제1 인식 결과(1010)와 보정된 제2 인식 결과를 비교하고 병합함으로써, 제3 인식 결과(1030)가 생성될 수 있다. 제1 인식 결과(1010)와 보정된 제2 인식 결과를 비교하는 예시는 아래 표 9와 같다.
| 인식 결과 종류 |
알약 |
위치 정보 |
카테고리 정보 |
신뢰도 값 |
중복 판정 |
| 제1 인식 결과 |
|
[360, 450] |
B |
0.5 |
O |
| 보정된 제2 인식 결과 |
|
[360, 450] |
D |
0.9 |
O |
표 9를 참조하여 설명하면, 제1 인식 결과(1010)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 의 바운딩 박스의 유사도가 제1 임계치 이상이어서 중복 판정을 받을 수 있다. 즉, 제1 인식 결과(1010)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 의 바운딩 박스의 위치 및 크기가 유사한 것으로 판정될 수 있다. 이 경우, 제1 인식 결과(1010)에 포함된 의 신뢰도 값은 0.5이고, 보정된 제2 인식 결과에 포함된 의 신뢰도 값은 0.9이므로, 보정된 제2 인식 결과에 포함된 에 관한 정보를 제3 인식 결과(1030)에 추가하고, 제1 인식 결과(1010)에 포함된 에 관한 정보는 제거되거나 제3 인식 결과(1030)에 추가되지 않을 수 있다.
이와 같이, 본 개시의 일 실시예에 따른 발명은 적어도 하나의 알약이 포함된 약포에 대해 복수의 이미지를 촬영하고, 복수의 이미지에 대한 객체 인식 수행 결과를 기초로 신뢰도 값이 높은 객체의 정보를 획득할 수 있다. 이 경우, 단일 이미지를 촬영한 경우보다 알약의 종류를 더 정확하게 파악할 수 있다. 예를 들어, 에 관하여 제1 이미지에서 카테고리 정보를 Class B로 상대적으로 부정확하게 인식하였으나, 에 관하여 제2 이미지에서 카테고리 정보를 Class D로 상대적으로 정확하게 인식할 수 있다. 이 경우, 정확도가 높은 정보인 Class D를 사용함으로써, 약포에 포장된 알약의 종류를 정확하게 파악할 수 있다.
약포의 경우, 좁은 공간에 복수의 알약이 배치되어 알약들이 겹쳐져서 촬영될 수 있다. 이 경우, 가려진 알약에 대한 객체 인식이 부정확하게 이루어질 수 있다. 또한, 알약의 한쪽 면에만 각인이 형성된 경우, 각인이 형성된 면으로 객체 인식을 수행하는 것이 각인이 형성되지 않은 면으로 객체 인식을 수행하는 것보다 객체 인식 정확도가 높을 수 있다. 따라서, 복수의 이미지에 대한 객체 인식 수행 결과를 기초로 신뢰도 값이 높은 객체의 정보를 이용함으로써, 다른 알약에 의해 가려진 알약 및 한쪽 면에만 각인이 형성된 알약을 높은 정확도로 인식할 수 있다.
도 11은 서로 다른 알약 3개가 겹쳐 있는 경우, 인식 결과 병합 과정의 일 예시를 나타내는 도면이다. 앞서 설명한 것과 같이, 제1 카메라에 의해 촬영된 제1 이미지(예를 들어, 약포 앞면 이미지)에 대해 객체 인식을 수행함으로써, 제1 인식 결과(1110)가 생성될 수 있다. 유사하게, 제2 카메라에 의해 촬영된 제2 이미지(예를 들어, 약포 뒷면 이미지)에 대해 객체 인식을 수행함으로써, 제2 인식 결과(1120)가 생성될 수 있다. 그 후, 제2 인식 결과(1120)를 보정하여 보정된 제2 인식 결과를 생성하고, 제1 인식 결과(1110)와 보정된 제2 인식 결과를 병합함으로써, 제3 인식 결과(1130)가 생성될 수 있다.
제1 인식 결과(1110), 제2 인식 결과(1120) 및 제3 인식 결과(1130)에서 , 및 의 인식 결과 및 인식 병합 결과는 도 9와 동일하므로 자세한 설명을 생략한다. 도 11에서는 도 9와 인식 결과가 다른 을 위주로 설명한다.
도시된 바와 같이, 제1 인식 결과(1110)는 에 관한 정보를 포함할 수 있다. 예를 들어, 제1 인식 결과(1110)는 의 바운딩 박스에 관한 정보(예, 위치 정보, 너비 정보, 높이 정보), 카테고리 정보(Class H), 신뢰도 값 등을 포함할 수 있다. 제2 인식 결과(1120)는 에 관한 정보를 포함하지 않을 수 있다. 즉, 제2 인식 결과(1120)에서는 가 및 에 가려져서 객체로 인식되지 않을 수 있다.
그 후, 캘리브레이션 파라미터를 이용하여 제2 인식 결과(1120)를 보정함으로써, 보정된 제2 인식 결과(미도시)가 생성될 수 있다. 제1 인식 결과(1110)와 보정된 제2 인식 결과를 비교하고 병합함으로써, 제3 인식 결과(1130)가 생성될 수 있다. 제1 인식 결과(1110)에 포함된 와 보정된 제2 인식 결과에 포함된 모든 객체는 카테고리 정보가 서로 상이하고, 바운딩 박스의 유사도가 미리 정해진 제1 임계치 미만(즉, 위치와 크기가 비유사)으로 판정될 수 있다. 또한, 제1 인식 결과(1110)에 포함된 의 바운딩 박스와 보정된 제2 인식 결과에 포함된 및/또는 의 바운딩 박스의 사이의 겹침 영역이 미리 정해진 제2 임계치 이상인 것으로 판정될 수 있다. 즉, 가 및/또는 와 겹쳐진 상태로 판정될 수 있다. 이 경우, 제1 인식 결과(1110)에 포함된 의 정보와 보정된 제2 인식 결과에 포함된 및/또는 의 정보가 모두 제3 인식 결과(1130)에 추가될 수 있다.
이와 같이, 3개 이상의 알약이 겹침 상태에 있는 경우, 제1 이미지를 기초로 객체 인식이 수행된 결과와 제2 이미지를 기초로 객체 인식이 수행된 결과를 비교하여 알약들의 겹침 상태를 인식/확인할 수 있다. 즉, 본 개시의 일 실시예에 따르면, 다면 촬영을 통한 객체 인식을 통해 알약의 겹쳐져 있는 관계를 명확히 파악할 수 있다.
도 12는 본 개시의 일 실시예에 따른 약포 검수 방법(1200)을 설명하기 위한 흐름도이다. 방법(1200)은 약포 검수 장치의 제어부(또는 적어도 하나의 프로세서) 및/또는 정보 처리 시스템의 적어도 하나의 프로세서에 의해 수행될 수 있다. 방법(1200)은 프로세서가 제1 카메라에 의해 촬영된 약포의 제1 이미지를 수신하는 단계(S1210)로 개시될 수 있다. 여기서, 제1 이미지는 약포의 제1 면을 촬영한 이미지일 수 있다. 또한, 프로세서는 제2 카메라에 의해 촬영된 약포의 제2 이미지를 수신할 수 있다(S1220). 여기서, 제2 이미지는 약포의 제2 면을 촬영한 이미지일 수 있다. 약포는 복수의 알약을 포함할 수 있다.
일 실시예에서, 프로세서는 약포와 연관된 약 정보를 수신할 수 있다(S1230). 여기서, 약 정보는 처방전 데이터 또는 약 개수 패턴을 포함할 수 있다. 약포는 약 정보에 기초하여 조제된 복수의 약포 중 하나일 수 있다.
그 후, 프로세서는 제1 이미지, 제2 이미지 및 약 정보에 기초하여 약포를 검수할 수 있다(S1240).
일 실시예에서, 약포를 검수하는 단계는, 객체 인식 모델을 이용하여 제1 이미지에 대한 객체 인식을 수행하여 제1 인식 결과를 생성하는 단계, 객체 인식 모델을 이용하여 제2 이미지에 대한 객체 인식을 수행하여 제2 인식 결과를 생성하는 단계 및 제1 카메라 및 제2 카메라와 연관된 캘리브레이션 파라미터를 이용하여 제2 인식 결과를 보정하는 단계를 포함할 수 있다. 여기서, 캘리브레이션 파라미터는 제1 카메라에 의해 촬영되는 이미지 내의 적어도 일부의 픽셀들과 제2 카메라에 의해 촬영되는 이미지 내의 적어도 일부의 픽셀들 사이의 위치 관계를 정의할 수 있다. 그 후, 프로세서는 제1 인식 결과, 보정된 제2 인식 결과 및 약 정보에 기초하여 약포를 검수할 수 있다.
일 실시예에서, 제1 이미지 및 제2 이미지가 촬영되기 이전에, 프로세서는 제1 카메라에 의해 촬영된 제4 이미지를 수신하고, 제2 카메라에 의해 촬영된 제5 이미지를 수신할 수 있다. 그 이후, 프로세서는 제4 이미지 및 제5 이미지에 기초하여 캘리브레이션 파라미터를 생성할 수 있다.
일 실시예에서, 제1 인식 결과를 생성하는 단계는, 처방전 데이터 및 제1 이미지에 기초하여 객체 인식을 수행하여 제1 인식 결과를 생성하는 단계를 포함할 수 있다. 제1 인식 결과는 제1 객체의 위치 정보 및 카테고리 정보를 포함할 수 있다. 또한, 제1 객체의 카테고리 정보는 처방전 데이터에 포함된 약 종류 중 하나에 대응될 수 있다. 대안적으로, 제1 객체의 카테고리 정보는 약포에 포함된 서로 다른 알약 형상 중 하나에 대응될 수 있다. 유사하게, 제2 인식 결과를 생성하는 단계는, 처방전 데이터 및 제2 이미지에 기초하여 객체 인식을 수행하여 제2 인식 결과를 생성하는 단계를 포함할 수 있다.
일 실시예에서, 제1 인식 결과는 제1 객체의 위치 정보, 카테고리 정보, 너비 정보, 높이 정보 또는 신뢰도 값(confidence value) 중 적어도 하나를 포함할 수 있다. 또한, 보정된 제2 객체의 인식 결과는 제2 객체의 보정된 위치 정보, 카테고리 정보, 보정된 너비 정보, 보정된 높이 정보 또는 신뢰도 값 중 적어도 하나를 포함할 수 있다.
일 실시예에서, 제1 인식 결과, 보정된 제2 인식 결과 및 약 정보에 기초하여 약포를 검수하는 단계는, 제1 인식 결과 및 보정된 제2 인식 결과를 병합하여 제3 인식 결과를 생성하는 단계 및 제3 인식 결과 중 적어도 일부 및 약 정보 중 적어도 일부를 비교하여 약포를 검수하는 단계를 포함할 수 있다. 여기서, 제3 인식 결과를 생성하는 단계는, 제1 객체와 연관된 바운딩 박스와 제2 객체와 연관된 바운딩 박스가 미리 정해진 제1 임계치 이상의 유사도를 가지는 것으로 판정하는 것에 응답하여, 제1 객체와 제2 객체 중 신뢰도 값이 낮은 하나를 제거하고 신뢰도 값이 높은 나머지 하나를 제3 인식 결과에 추가하는 단계를 포함할 수 있다. 여기서, 제3 인식 결과를 생성하는 단계는, 제1 객체의 위치 정보, 너비 정보 및 높이 정보, 그리고 제2 객체의 보정된 위치 정보, 보정된 너비 정보 및 보정된 높이 정보에 기초하여 제1 객체와 연관된 바운딩 박스와 제2 객체와 연관된 바운딩 박스 사이의 유사도를 판정하는 단계를 포함할 수 있다.
추가적으로 또는 대안적으로, 제3 인식 결과를 생성하는 단계는, 제1 객체의 카테고리 정보와 제2 객체의 카테고리 정보가 서로 상이하고, 제1 객체와 연관된 바운딩 박스와 제2 객체와 연관된 바운딩 박스가 미리 정해진 제1 임계치 미만의 유사도를 가지고, 제1 객체와 연관된 바운딩 박스와 제2 객체와 연관된 바운딩 박스 사이의 겹침 영역이 미리 정해진 제2 임계치 이상인 것으로 판정하는 것에 응답하여, 제1 객체와 제2 객체를 모두 제3 인식 결과에 추가하는 단계를 포함할 수 있다.
다른 실시예에서, 약포를 검수하는 단계는, 객체 인식 모델을 이용하여 제1 이미지에 대한 객체 인식을 수행하여 제1 인식 결과를 생성하는 단계, 제1 카메라 및 제2 카메라와 연관된 캘리브레이션 파라미터를 이용하여 제2 이미지를 제3 이미지로 변환하는 단계, 객체 인식 모델을 이용하여 제3 이미지에 대한 객체 인식을 수행하여 제2 인식 결과를 생성하는 단계 및 제1 인식 결과, 제2 인식 결과 및 약 정보에 기초하여 약포를 검수하는 단계를 포함할 수 있다.
일 실시예에서, 프로세서는 약포 검수 결과로서 합격 신호 또는 불합격 신호를 출력할 수 있다.
상술한 흐름도 및 상술한 설명은 일 예시일 뿐이며, 일부 실시예에서는 다르게 구현될 수 있다. 예를 들어, 일부 실시예에서는 각 단계의 순서가 바뀌거나, 일부 단계가 반복 수행되거나, 일부 단계가 생략되거나, 일부 단계가 추가될 수 있다.
상술한 방법은 컴퓨터에서 실행하기 위해 컴퓨터 판독 가능한 기록 매체에 저장된 컴퓨터 프로그램으로 제공될 수 있다. 매체는 컴퓨터로 실행 가능한 프로그램을 계속 저장하거나, 실행 또는 다운로드를 위해 임시 저장하는 것일수도 있다. 또한, 매체는 단일 또는 수개 하드웨어가 결합된 형태의 다양한 기록 수단 또는 저장수단일 수 있는데, 어떤 컴퓨터 시스템에 직접 접속되는 매체에 한정되지 않고, 네트워크 상에 분산 존재하는 것일 수도 있다. 매체의 예시로는, 하드 디스크, 플로피 디스크 및 자기 테이프와 같은 자기 매체, CD-ROM 및 DVD 와 같은 광기록 매체, 플롭티컬 디스크(floptical disk)와 같은 자기-광 매체(magneto optical medium), 및 ROM, RAM, 플래시 메모리 등을 포함하여 프로그램 명령어가 저장되도록 구성된 것이 있을 수 있다. 또한, 다른 매체의 예시로, 애플리케이션을 유통하는 앱 스토어나 기타 다양한 소프트웨어를 공급 내지 유통하는 사이트, 서버 등에서 관리하는 기록매체 내지 저장매체도 들 수 있다.
본 개시의 방법, 동작 또는 기법들은 다양한 수단에 의해 구현될 수도 있다. 예를 들어, 이러한 기법들은 하드웨어, 펌웨어, 소프트웨어, 또는 이들의 조합으로 구현될 수도 있다. 본원의 개시와 연계하여 설명된 다양한 예시적인 논리적 블록들, 모듈들, 회로들, 및 알고리즘 단계들은 전자 하드웨어, 컴퓨터 소프트웨어, 또는 양자의 조합들로 구현될 수도 있음을 통상의 기술자들은 이해할 것이다. 하드웨어 및 소프트웨어의 이러한 상호 대체를 명확하게 설명하기 위해, 다양한 예시적인 구성요소들, 블록들, 모듈들, 회로들, 및 단계들이 그들의 기능적 관점에서 일반적으로 위에서 설명되었다. 그러한 기능이 하드웨어로서 구현되는지 또는 소프트웨어로서 구현되는 지의 여부는, 특정 애플리케이션 및 전체 시스템에 부과되는 설계 요구사항들에 따라 달라진다. 통상의 기술자들은 각각의 특정 애플리케이션을 위해 다양한 방식들로 설명된 기능을 구현할 수도 있으나, 그러한 구현들은 본 개시의 범위로부터 벗어나게 하는 것으로 해석되어서는 안 된다.
하드웨어 구현에서, 기법들을 수행하는 데 이용되는 프로세싱 유닛들은, 하나 이상의 ASIC들, DSP들, 디지털 신호 프로세싱 디바이스들(digital signal processing devices; DSPD들), 프로그램가능 논리 디바이스들(programmable logic devices; PLD들), 필드 프로그램가능 게이트 어레이들(field programmable gate arrays; FPGA들), 프로세서들, 제어기들, 마이크로제어기들, 마이크로프로세서들, 전자 디바이스들, 본 개시에 설명된 기능들을 수행하도록 설계된 다른 전자 유닛들, 컴퓨터, 또는 이들의 조합 내에서 구현될 수도 있다.
따라서, 본 개시와 연계하여 설명된 다양한 예시적인 논리 블록들, 모듈들, 및 회로들은 범용 프로세서, DSP, ASIC, FPGA나 다른 프로그램 가능 논리 디바이스, 이산 게이트나 트랜지스터 로직, 이산 하드웨어 컴포넌트들, 또는 본원에 설명된 기능들을 수행하도록 설계된 것들의 임의의 조합으로 구현되거나 수행될 수도 있다. 범용 프로세서는 마이크로프로세서일 수도 있지만, 대안으로, 프로세서는 임의의 종래의 프로세서, 제어기, 마이크로제어기, 또는 상태 머신일 수도 있다. 프로세서는 또한, 컴퓨팅 디바이스들의 조합, 예를 들면, DSP와 마이크로프로세서, 복수의 마이크로프로세서들, DSP 코어와 연계한 하나 이상의 마이크로프로세서들, 또는 임의의 다른 구성의 조합으로서 구현될 수도 있다.
펌웨어 및/또는 소프트웨어 구현에 있어서, 기법들은 랜덤 액세스 메모리(random access memory; RAM), 판독 전용 메모리(read-only memory; ROM), 비휘발성 RAM(non-volatile random access memory; NVRAM), PROM(programmable read-only memory), EPROM(erasable programmable read-only memory), EEPROM(electrically erasable PROM), 플래시 메모리, 컴팩트 디스크(compact disc; CD), 자기 또는 광학 데이터 스토리지 디바이스 등과 같은 컴퓨터 판독가능 매체 상에 저장된 명령들로서 구현될 수도 있다. 명령들은 하나 이상의 프로세서들에 의해 실행 가능할 수도 있고, 프로세서(들)로 하여금 본 개시에 설명된 기능의 특정 양태들을 수행하게 할 수도 있다.
소프트웨어로 구현되는 경우, 상술된 기법들은 하나 이상의 명령들 또는 코드로서 컴퓨터 판독 가능한 매체 상에 저장되거나 또는 컴퓨터 판독 가능한 매체를 통해 전송될 수도 있다. 컴퓨터 판독가능 매체들은 한 장소에서 다른 장소로 컴퓨터 프로그램의 전송을 용이하게 하는 임의의 매체를 포함하여 컴퓨터 저장 매체들 및 통신 매체들 양자를 포함한다. 저장 매체들은 컴퓨터에 의해 액세스될 수 있는 임의의 이용 가능한 매체들일 수도 있다. 비제한적인 예로서, 이러한 컴퓨터 판독가능 매체는 RAM, ROM, EEPROM, CD-ROM 또는 다른 광학 디스크 스토리지, 자기 디스크 스토리지 또는 다른 자기 스토리지 디바이스들, 또는 소망의 프로그램 코드를 명령들 또는 데이터 구조들의 형태로 이송 또는 저장하기 위해 사용될 수 있으며 컴퓨터에 의해 액세스될 수 있는 임의의 다른 매체를 포함할 수 있다. 또한, 임의의 접속이 컴퓨터 판독가능 매체로 적절히 칭해진다.
예를 들어, 소프트웨어가 동축 케이블, 광섬유 케이블, 연선, 디지털 가입자 회선 (DSL), 또는 적외선, 무선, 및 마이크로파와 같은 무선 기술들을 사용하여 웹사이트, 서버, 또는 다른 원격 소스로부터 전송되면, 동축 케이블, 광섬유 케이블, 연선, 디지털 가입자 회선, 또는 적외선, 무선, 및 마이크로파와 같은 무선 기술들은 매체의 정의 내에 포함된다. 본원에서 사용된 디스크(disk) 와 디스크(disc)는, CD, 레이저 디스크, 광 디스크, DVD(digital versatile disc), 플로피디스크, 및 블루레이 디스크를 포함하며, 여기서 디스크들(disks)은 보통 자기적으로 데이터를 재생하고, 반면 디스크들(discs) 은 레이저를 이용하여 광학적으로 데이터를 재생한다. 위의 조합들도 컴퓨터 판독가능 매체들의 범위 내에 포함되어야 한다.
소프트웨어 모듈은, RAM 메모리, 플래시 메모리, ROM 메모리, EPROM 메모리, EEPROM 메모리, 레지스터들, 하드 디스크, 이동식 디스크, CD-ROM, 또는 공지된 임의의 다른 형태의 저장 매체 내에 상주할 수도 있다. 예시적인 저장 매체는, 프로세가 저장 매체로부터 정보를 판독하거나 저장 매체에 정보를 기록할 수 있도록, 프로세서에 연결될 수 있다. 대안으로, 저장 매체는 프로세서에 통합될 수도 있다. 프로세서와 저장 매체는 ASIC 내에 존재할 수도 있다. ASIC은 유저 단말 내에 존재할 수도 있다. 대안으로, 프로세서와 저장 매체는 유저 단말에서 개별 구성요소들로서 존재할 수도 있다.
이상 설명된 실시예들이 하나 이상의 독립형 컴퓨터 시스템에서 현재 개시된 주제의 양태들을 활용하는 것으로 기술되었으나, 본 개시는 이에 한정되지 않고, 네트워크나 분산 컴퓨팅 환경과 같은 임의의 컴퓨팅 환경과 연계하여 구현될 수도 있다. 또 나아가, 본 개시에서 주제의 양상들은 복수의 프로세싱 칩들이나 장치들에서 구현될 수도 있고, 스토리지는 복수의 장치들에 걸쳐 유사하게 영향을 받게 될 수도 있다. 이러한 장치들은 PC들, 네트워크 서버들, 및 휴대용 장치들을 포함할 수도 있다.
본 명세서에서는 본 개시가 일부 실시예들과 관련하여 설명되었지만, 본 개시의 발명이 속하는 기술분야의 통상의 기술자가 이해할 수 있는 본 개시의 범위를 벗어나지 않는 범위에서 다양한 변형 및 변경이 이루어질 수 있다. 또한, 그러한 변형 및 변경은 본 명세서에 첨부된 특허청구의 범위 내에 속하는 것으로 생각되어야 한다.