RU159596U1 - Летательный аппарат без силовой установки - Google Patents
Летательный аппарат без силовой установки Download PDFInfo
- Publication number
- RU159596U1 RU159596U1 RU2015125737/04U RU2015125737U RU159596U1 RU 159596 U1 RU159596 U1 RU 159596U1 RU 2015125737/04 U RU2015125737/04 U RU 2015125737/04U RU 2015125737 U RU2015125737 U RU 2015125737U RU 159596 U1 RU159596 U1 RU 159596U1
- Authority
- RU
- Russia
- Prior art keywords
- aircraft
- power plant
- drive
- rotor
- ground
- Prior art date
Links
- 238000009434 installation Methods 0.000 title description 5
- 230000005540 biological transmission Effects 0.000 claims abstract description 9
- 230000001174 ascending effect Effects 0.000 claims abstract description 7
- 230000003387 muscular Effects 0.000 claims abstract description 4
- 239000007789 gas Substances 0.000 claims abstract description 3
- 239000007788 liquid Substances 0.000 claims abstract description 3
- 239000004449 solid propellant Substances 0.000 claims abstract description 3
- 230000003313 weakening effect Effects 0.000 claims abstract 2
- 238000005259 measurement Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 101100537665 Trypanosoma cruzi TOR gene Proteins 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
- 238000005303 weighing Methods 0.000 description 1
Images





Landscapes
- Toys (AREA)
Abstract
1. Летательный аппарат вертикального взлёта и посадки, крутящий момент несущего винта которого обеспечивает механический привод от наземной силовой установки, отличающийся тем, что механический привод каждого несущего винта содержит: ведомое колесо фрикционной передачи, связанное через коническую зубчатую передачу с валом несущего винта, ось вращения ведомого колеса расположена в горизонтальной плоскости, а радиус ограничен минимально допустимым значением, менее которого невозможен взлёт и зависание в воздухе летательного аппарата; бесконечный приводной трос фрикционной передачи, вращающий ведомое колесо и приводимый в движение ведущим барабаном фрикционной передачи, закреплённым на валу наземной силовой установки и снабжённым вращающимся соосно, но независимо от барабана кронштейном, обеспечивающим компенсацию разности скоростей нисходящей и восходящей ветвей бесконечного приводного троса в режиме взлёта и посадки летательного аппарата.2. Летательный аппарат по п.1, отличающийся тем, что в качестве силовой установки можно применить мускульную силу человека, или электродвигатель, или мотор на газовом, жидком или твёрдом топливе.3. Летательный аппарат по п.1, отличающийся тем, что устойчивость аппарата при воздействии посторонних возмущающих сил обеспечивает уравновешивающая штанга и прикреплённая к ней нить, связанная с наземным устройством натяжения/ослабления нити.4. Летательный аппарат по п.1, отличающийся тем, что силовая установка и устройство натяжения/ослабления нити уравновешивающей штанги смонтированы на передвижной платформе с возможностью закрепления на ней шасси летательного аппарата.
Description
Полезная модель относится к летательным аппаратам (ЛА) вертикального взлета и посадки тяжелее воздуха без силовой установки. Подъемную силу ЛА создают два несущих винта, смещенных относительно центральной вертикальной оси аппарата в противоположные стороны на одинаковое расстояние. Крутящий момент несущих винтов обеспечивает наземная силовая установка, передаваемый механическим способом бесконечным тросом (то есть тросом с замкнутыми концами) - приводным тросом.
Полезная модель может использоваться для подъема на высоту нескольких десятков метров и удержания на заданной высоте в режиме зависания измерительной аппаратуры, средств видеонаблюдения, рекламных материалов и других грузов и/или людей. Также полезная модель может использоваться в качестве игрушечного летательного аппарата или для проведения спортивных соревнований летательных аппаратов тяжелее воздуха, приводимых мускульной силой человека.
Известен игрушечный привязной летательный аппарат, состоящий из двух основных частей: летающей платформы и ручного привода. Летающая платформа состоит из корпуса и ротора с трехлопастным несущим винтом. Ручной привод состоит из гибкого троса и приводной машинки. Гибкий трос представляет собой пружину, которая передает крутящий момент на ротор при вращении от ручного привода. Внутри гибкого троса проходит неподвижный трос, который препятствует вращению корпуса (Б. Щербаков, «Летающее кресло», ж. Юный техник - для умелых рук, 1979 г., №9, с. 5-7). Данный аппарат принят за аналог. Недостатком аналога является ограниченное применение только в качестве игрушечного аппарата, поднимающего небольшой вес на высоту нескольких метров.
Задачей, на решение которой направлена заявляемая полезная модель, является обеспечение возможности длительного зависания над определенной точкой местности на высоте нескольких десятков метров летательного аппарата без силовой установки с полезным грузом и/или человеком на борту.
Указанная задача решается полезной моделью за счет того, что механический привод от наземной силовой установки выполняет фрикционная передача крутящего момента бесконечным тросом.
В качестве силовой установки может использоваться мускульная сила человека, электродвигатель, мотор на газовом, жидком или твердом топливе. Так как на земле может быть подготовлен не ограниченный запас энергоносителя для силовой установки, то этим условием обеспечивается возможность зависания в воздухе летательного аппарата длительное время. Облегчение веса летательного аппарата за счет отсутствия силовой установки на борту позволяет увеличить долю полезного груза.
Передача крутящего момента на несущие винты от наземной силовой установки посредством бесконечного приводного троса естественно сопровождается возникновением дополнительных сил из-за натяжения троса, направленных вертикально вниз. Однако приведенные ниже расчеты показывают, что задавая необходимые размеры элементов фрикционной передачи, можно выбрать такие параметры подводимой к несущим винтам мощности и угловой скорости их вращения, которые обеспечивают подъемную силу несущих винтов равную или превышающую в сумме вес ЛА и дополнительную силу, возникающую из-за натяжения приводного троса.
Сущность полезной модели поясняется чертежами летательного аппарата с двумя несущими винтами, где на фиг. 1 дана схема предлагаемого аппарата, вид прямо, на фиг. 2 та же схема, вид сбоку. На фиг. 3 показана наземная передвижная платформа с установленными на ней силовыми установками и устройством для натяжения-ослабления нити уравновешивающей штанги. Фиг. 4 и фиг. 5 содержат характеристики несущего винта. На фиг. 6 помещена фотография измерительной установки. Обозначения на чертежах следующие:
1) несущий винт;
2) каркас (ферма) летательного аппарата;
3) ведомое колесо фрикционной передачи;
4) коническая зубчатая передача;
5) вал несущего винта;
6) нисходящая ветвь приводного бесконечного троса;
7) восходящая ветвь приводного бесконечного троса;
8) прижимной направляющий ролик;
9) шасси;
10) уравновешивающая штанга;
11) нить уравновешивающей штанги;
12) передвижная платформа;
13) силовая установка;
14) вал силовой установки;
15) ведущий барабан фрикционной передачи;
16) приемный направляющий ролик;
17) передающие направляющие ролики;
18) передающий ролик;
19) кронштейн;
20) устройство для натяжения-ослабления нити уравновешивающей штанги.
Летательный аппарат работает следующим образом. Каждый из двух несущих винтов 1 создает подъемную силу T∗, необходимую для вертикального взлета и «зависания» в воздухе. Винты вращаются с угловой скоростью Q∗ в режиме без срыва потока. Крутящий момент M∗ несущего винта 1 передается ему от силовой установки 13 через вал силовой установки 14 на ведущий барабан 15 и ведомое колесо 3 посредством бесконечного троса фрикционной передачи. С ведомого колеса 3 через коническую зубчатую передачу 4, имеющую передаточное число равное 1, крутящий момент передается валу несущего винта 5.
В наземном положении ЛА на ведущий барабан 15 намотано такое количество витков бесконечного приводного троса, которого будет достаточно при его полном разматывании для удержания ЛА на заданной высоте. Нисходящая ветвь 6 и восходящая ветвь 7 бесконечного приводного троса переброшены через ведомое колесо 3 радиусом RК и в покое находятся в натянутом состоянии каждая силой FН/2.
В режиме взлета нисходящая ветвь 6 приводного троса при вращении ведущего барабана 15 приобретает дополнительное натяжение силой FН/2, а восходящая ветвь 7 - ослабляет натяжение на эту же величину. В результате ведомое колесо 3 под действием момента силы M∗=FН·RК вращается с угловой скоростью ΩК=Ω∗ при условии не проскальзывания троса вдоль обода колеса.
Вертикальная скорость ЛА VЛА при взлете направлена вверх, имеет положительное значение. В режиме посадки - направлена вниз, имеет отрицательное значение. Линейная скорость движения обода ведомого колеса 3 относительно оси вращения колеса равна VК=RК·ΩК. Скорость движения нисходящего участка 6 приводного троса относительно земли равна VН=VК-VЛА. Скорость движения восходящего участка 7 приводного троса относительно земли равна VВ=VК+VЛА. Таким образом, в режиме взлета или посадки ЛА |VН-VВ|=|2VЛА|. Для компенсации разности скоростей нисходящей ветви 6 и восходящей ветви 7 приводного троса в конструкцию фрикционной передачи добавляется кронштейн 19 с установленными на нем передающими направляющими роликами 17 и 18. Кронштейн имеет возможность вращаться относительно вертикальной оси, совпадающей с осью вращения ведущего барабана 15. При взлете ЛА кронштейн 19 вращается в направлении разматывания приводного троса с барабана 15 с угловой скоростью ΩКР=|2VЛА|/RБ, где RБ - радиус барабана 15. При посадке ЛА кронштейн 19 вращается в направлении наматывания приводного троса на барабан 15 с угловой скоростью ΩКР=|2VЛА|/RБ.
В режиме зависания ЛА VЛА=0 и VН=VВ=VК. Барабан 15 вращается с угловой скоростью ΩБ=VК/RБ, кронштейн 19 неподвижен относительно земли.
От силовой установки 13 отбирается мощность NСУ. Часть мощности NТР теряется на трение в трансмиссии. К несущему винту подводится мощность N∗ так, что NСУ=N∗+NТР. Введем коэффициент k=NТР/N∗, тогда NСУ=N∗+kN∗=N∗(1+k). Полагая, для простоты расчетов, k<<1, тогда NСУ≈N∗.
Имеем следующие соотношения в введенных выше обозначениях:
T∗≥G/m+FН, где
G - вес ЛА, включающий вес приводного троса;
m - количество несущих винтов ЛА.
Из (1) RК=N∗/(FН·Ω∗) и с учетом (2) получим

Для расчетов радиуса RК ведомого колеса необходимы следующие характеристики несущего винта: зависимость подъемной силы T несущего винта от подводимой к нему мощности N (фиг. 4) и зависимость угловой скорости вращения Ω. несущего винта также от подводимой к нему мощности N (фиг. 5). По зависимости фиг. 4 задается значение T∗ большее, чем вес ЛА, разделенный на количество несущих винтов T∗>G/m, и меньшее критического значения T∗<TКРИТ (граница области срыва потока). Для этого значения T∗ по графику фиг. 4 определяем подводимую к несущему винту мощность N∗. Далее из зависимости фиг. 5 по значению мощности N∗ определяем значение угловой скорости вращения несущего винта Q∗. Этих трех параметров T∗, N∗ и Ω∗ достаточно для определения необходимого радиуса RК ведомого колеса 3 по формуле (3). Значение
является минимально допустимым значением радиуса ведомого колеса, при котором возможен взлет и зависание ЛА.
Для подтверждения реализуемости предложенной конструкции ЛА автором была построена измерительная установка (фиг. 6). Измерительная установка состоит из стойки, на которой закреплен прибор для измерения угловой скорости вращения несущего винта (электронный велоспидометр с датчиком). На подставке устанавливаются электронные весы, в которые упирается вал несущего винта с закрепленной на нем катушкой с нитью. На вал крепится несущий винт, имеющий следующие характеристики: диаметр винта - 1,16 м; длина лопасти - 0,5 м; хорда лопасти - 0,145 м; профиль лопасти - S8037 16%; угол установки (шаг) - 18°. Нить с катушки сматывается через систему роликов свободно падающим грузом, заставляя вращаться вал винта. Измерив радиус катушки, массу падающего груза, угловую скорость вращения винта, можно вычислить подводимую к несущему винту мощность. Одновременно с электронных весов снимаются показания подъемной тяги винта. Проведя измерения для различных масс падающего груза, строятся соответствующие графики, аналогичные показанным на фиг. 4 и фиг. 5. Для двухвинтового ЛА весом G=4,68 Н, проведенные измерения дали следующие результаты:
T∗=3,34 Н; N∗=6,62 Вт; Ω∗=2π·3,5 рад/с
Подставив в формулу (3), получаем минимально допустимый радиус ведомого колеса 0,30 м. Так как диаметр ведомого колеса 3 превышает половину диаметра несущего винта, целесообразно располагать ось вращения ведомого колеса в горизонтальной плоскости, чтобы уменьшить возмущение индуктивного потока воздуха, идущего от несущего винта.
Аналогичные измерения и расчеты можно провести для несущего винта с тягой до 1000 Н, чтобы построить летательный аппарат, способный поднять человека и полезный груз на высоту нескольких десятков метров.
Обеспечение устойчивого положения ЛА при воздействии посторонних возмущающих сил можно реализовать известными способами, не упоминаемыми в данном описании, а также добавлением в конструкцию ЛА уравновешивающей штанги 10 и прикрепленной к ней нити 11. Нить 11 намотана на барабан 20, расположенный на передвижной платформе 12. Усиливая или ослабляя натяжение уравновешивающей нити вращением барабана 20 в соответствующем направлении, можно регулировать наклон ЛА в плоскости, перпендикулярной плоскости вращения ведомых колес 3.
Claims (4)
1. Летательный аппарат вертикального взлёта и посадки, крутящий момент несущего винта которого обеспечивает механический привод от наземной силовой установки, отличающийся тем, что механический привод каждого несущего винта содержит: ведомое колесо фрикционной передачи, связанное через коническую зубчатую передачу с валом несущего винта, ось вращения ведомого колеса расположена в горизонтальной плоскости, а радиус ограничен минимально допустимым значением, менее которого невозможен взлёт и зависание в воздухе летательного аппарата; бесконечный приводной трос фрикционной передачи, вращающий ведомое колесо и приводимый в движение ведущим барабаном фрикционной передачи, закреплённым на валу наземной силовой установки и снабжённым вращающимся соосно, но независимо от барабана кронштейном, обеспечивающим компенсацию разности скоростей нисходящей и восходящей ветвей бесконечного приводного троса в режиме взлёта и посадки летательного аппарата.
2. Летательный аппарат по п.1, отличающийся тем, что в качестве силовой установки можно применить мускульную силу человека, или электродвигатель, или мотор на газовом, жидком или твёрдом топливе.
3. Летательный аппарат по п.1, отличающийся тем, что устойчивость аппарата при воздействии посторонних возмущающих сил обеспечивает уравновешивающая штанга и прикреплённая к ней нить, связанная с наземным устройством натяжения/ослабления нити.
4. Летательный аппарат по п.1, отличающийся тем, что силовая установка и устройство натяжения/ослабления нити уравновешивающей штанги смонтированы на передвижной платформе с возможностью закрепления на ней шасси летательного аппарата.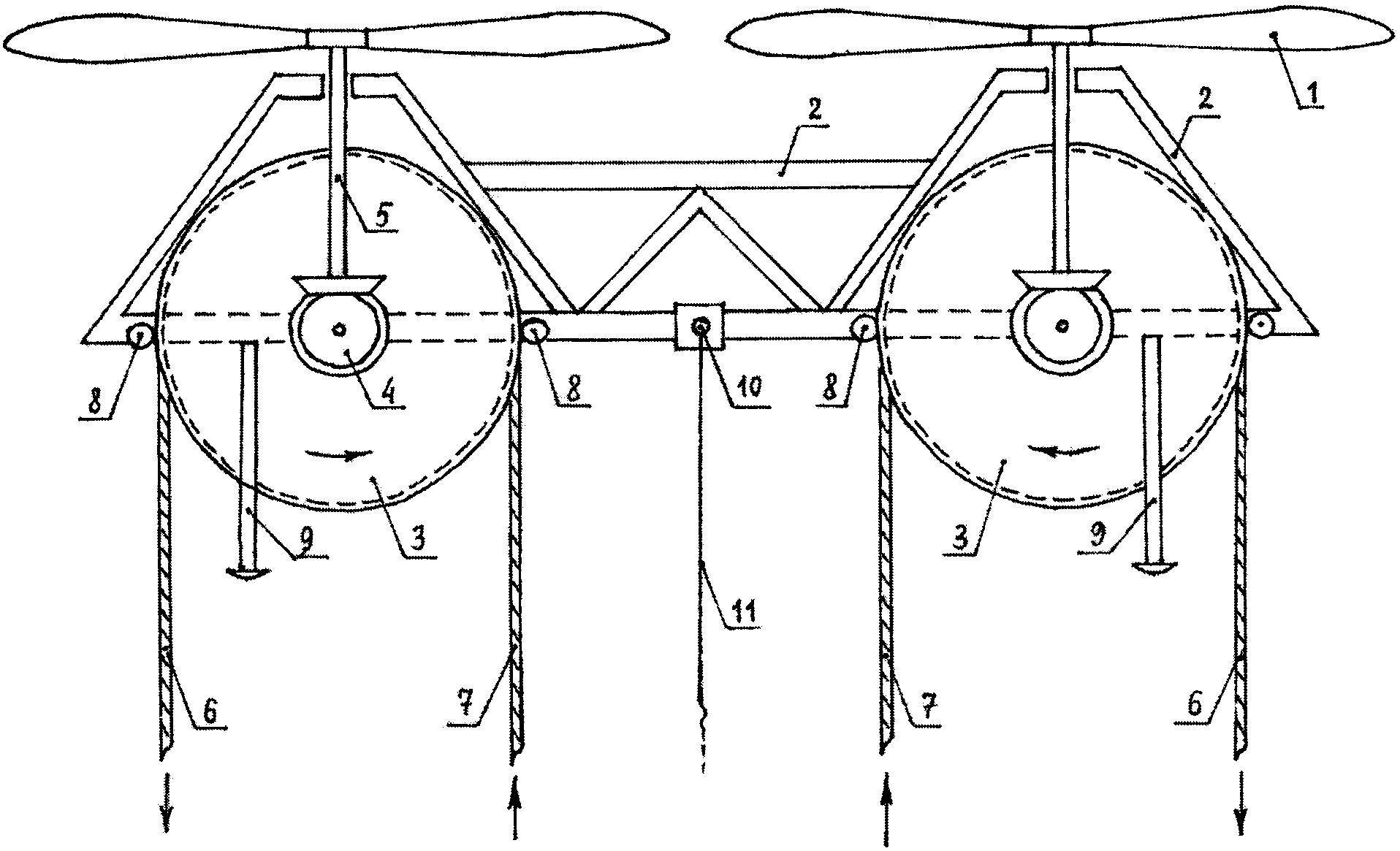
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2015125737/04U RU159596U1 (ru) | 2015-06-30 | 2015-06-30 | Летательный аппарат без силовой установки |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2015125737/04U RU159596U1 (ru) | 2015-06-30 | 2015-06-30 | Летательный аппарат без силовой установки |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU159596U1 true RU159596U1 (ru) | 2016-02-10 |
Family
ID=55314082
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2015125737/04U RU159596U1 (ru) | 2015-06-30 | 2015-06-30 | Летательный аппарат без силовой установки |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU159596U1 (ru) |
-
2015
- 2015-06-30 RU RU2015125737/04U patent/RU159596U1/ru not_active IP Right Cessation
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6198017B2 (ja) | ジャイログライダー装置のテザー格納システム | |
| US20150330368A1 (en) | Airborne wind energy system with rotary wing, flying generator and optional multi-leg tether | |
| JP2013079034A (ja) | 空撮用回転翼機 | |
| US20030136875A1 (en) | Aircraft with rotary wings | |
| RU159596U1 (ru) | Летательный аппарат без силовой установки | |
| WO2022008437A1 (fr) | Dispositif volant a decollage vertical | |
| Yi et al. | Design and experimental study of a new flapping wing rotor micro aerial vehicle | |
| CN1349907A (zh) | 三类相似的飞行器及其轨道设施 | |
| DE102019004106B3 (de) | Ballongeführter Höhenwindturbinengenerator zur Erzeugung elektrischer Energie | |
| JP2012137082A (ja) | 遠心力による推進力発生装置 | |
| CN107115649B (zh) | 花样滑冰捻转托举动作保护装置 | |
| US20110185840A1 (en) | Method and apparatus for an inertial drive | |
| Kelly et al. | An animal centrifuge for prolonged operation | |
| CN104768846A (zh) | 高海拔磁悬浮垂直轴风力涡轮机系统(ham-vawt) | |
| US7048232B1 (en) | Plottner rotor kite | |
| CN102579219A (zh) | 卷轮车式悬棺升吊装置 | |
| CN201719713U (zh) | 高楼逃生器 | |
| WO2013005182A2 (en) | Wind power plant | |
| CN208564854U (zh) | 一种稳定固定的风电机 | |
| KR20090021300A (ko) | 공중풍력발전장치 | |
| US20120031297A1 (en) | Cableway car with braking pulley device | |
| WO2003018400A1 (fr) | Aerostat captif et equipement de commande associe | |
| Halliday et al. | Wind tunnel experiments on a model of a tandem rotor helicopter | |
| US20190072081A1 (en) | Airborne wind turbine | |
| CN2442695Y (zh) | 人工动力短臂离心机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM1K | Utility model has become invalid (non-payment of fees) |
Effective date: 20160701 |