RU2363096C2 - Способ фазовой автоподстройки частоты и устройство для его осуществления - Google Patents
Способ фазовой автоподстройки частоты и устройство для его осуществления Download PDFInfo
- Publication number
- RU2363096C2 RU2363096C2 RU2005108614/09A RU2005108614A RU2363096C2 RU 2363096 C2 RU2363096 C2 RU 2363096C2 RU 2005108614/09 A RU2005108614/09 A RU 2005108614/09A RU 2005108614 A RU2005108614 A RU 2005108614A RU 2363096 C2 RU2363096 C2 RU 2363096C2
- Authority
- RU
- Russia
- Prior art keywords
- operatively connected
- input
- output
- phase
- coefficient
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 43
- 230000006978 adaptation Effects 0.000 claims abstract description 94
- 238000012546 transfer Methods 0.000 claims abstract description 25
- 230000001629 suppression Effects 0.000 claims description 45
- 238000004891 communication Methods 0.000 claims description 42
- 230000005540 biological transmission Effects 0.000 claims description 24
- 230000004044 response Effects 0.000 claims description 20
- 230000009365 direct transmission Effects 0.000 claims description 12
- 230000008878 coupling Effects 0.000 claims description 10
- 238000010168 coupling process Methods 0.000 claims description 10
- 238000005859 coupling reaction Methods 0.000 claims description 10
- 230000008859 change Effects 0.000 claims description 9
- 230000010354 integration Effects 0.000 claims 17
- 230000033228 biological regulation Effects 0.000 claims 5
- 230000015572 biosynthetic process Effects 0.000 claims 2
- 230000000694 effects Effects 0.000 abstract description 5
- 239000000126 substance Substances 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 10
- 230000009466 transformation Effects 0.000 description 8
- 230000005284 excitation Effects 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 238000004590 computer program Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 238000000844 transformation Methods 0.000 description 3
- 230000003044 adaptive effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 239000000969 carrier Substances 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 238000009472 formulation Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000000047 product Substances 0.000 description 2
- 239000013589 supplement Substances 0.000 description 2
- 241000219289 Silene Species 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 229910052918 calcium silicate Inorganic materials 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000012407 engineering method Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000003607 modifier Substances 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images



Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03C—MODULATION
- H03C3/00—Angle modulation
- H03C3/02—Details
- H03C3/09—Modifications of modulator for regulating the mean frequency
- H03C3/0908—Modifications of modulator for regulating the mean frequency using a phase locked loop
- H03C3/0983—Modifications of modulator for regulating the mean frequency using a phase locked loop containing in the loop a mixer other than for phase detection
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03C—MODULATION
- H03C3/00—Angle modulation
- H03C3/02—Details
- H03C3/09—Modifications of modulator for regulating the mean frequency
- H03C3/0908—Modifications of modulator for regulating the mean frequency using a phase locked loop
- H03C3/0916—Modifications of modulator for regulating the mean frequency using a phase locked loop with frequency divider or counter in the loop
- H03C3/0933—Modifications of modulator for regulating the mean frequency using a phase locked loop with frequency divider or counter in the loop using fractional frequency division in the feedback loop of the phase locked loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03C—MODULATION
- H03C3/00—Angle modulation
- H03C3/02—Details
- H03C3/09—Modifications of modulator for regulating the mean frequency
- H03C3/0908—Modifications of modulator for regulating the mean frequency using a phase locked loop
- H03C3/0941—Modifications of modulator for regulating the mean frequency using a phase locked loop applying frequency modulation at more than one point in the loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03C—MODULATION
- H03C3/00—Angle modulation
- H03C3/02—Details
- H03C3/09—Modifications of modulator for regulating the mean frequency
- H03C3/0908—Modifications of modulator for regulating the mean frequency using a phase locked loop
- H03C3/095—Modifications of modulator for regulating the mean frequency using a phase locked loop applying frequency modulation to the loop in front of the voltage controlled oscillator
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03C—MODULATION
- H03C3/00—Angle modulation
- H03C3/02—Details
- H03C3/09—Modifications of modulator for regulating the mean frequency
- H03C3/0908—Modifications of modulator for regulating the mean frequency using a phase locked loop
- H03C3/0966—Modifications of modulator for regulating the mean frequency using a phase locked loop modulating the reference clock
Landscapes
- Stabilization Of Oscillater, Synchronisation, Frequency Synthesizers (AREA)
- Nitrogen Condensed Heterocyclic Rings (AREA)
- Devices For Executing Special Programs (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
Abstract
Изобретение относится к области радиотехники и может быть использовано для фазовой автоматической подстройки частоты. Контур фазовой автоподстройки частоты включает ведущий генератор, имеющий выход, оперативно подключенный к первому входу фазового детектора, ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора, и модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора, причем модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора, содержит усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, оперативно подключенный к выводу исходной ошибки фазового детектора, и интегратор модуля адаптации коэффициента передачи в прямом направлении, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении и ведомым генератором. Технический результат - повышение стабильности. 4 н. и 36 з.п. ф-лы, 18 ил.
Description
Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к контурам фазовой автоподстройки частоты.
Уровень техники
Контуры фазовой автоподстройки частоты представляют собой электрические цепи, которые обеспечивают относительно стабильные выходные сигналы изменяющихся частот за счет использования ведущей генераторной схемы, которая имеет относительно неизменную частоту.
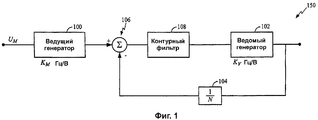
На фиг. 1 представлен в виде блок-схемы контур 150 фазовой автоподстройки частоты. Ведущий генератор 100 имеет входной сигнал напряжения, обозначенный символом  . Ведущий генератор 100 обеспечивает очень стабильное генерирование около некоторой определенной средней частоты генератора. Частота генерирования может претерпевать незначительные изменения за счет изменения значения входного сигнала напряжения,
. Ведущий генератор 100 обеспечивает очень стабильное генерирование около некоторой определенной средней частоты генератора. Частота генерирования может претерпевать незначительные изменения за счет изменения значения входного сигнала напряжения,  . Ведущий генератор 100 имеет номинальное значение чувствительности, составляющее
. Ведущий генератор 100 имеет номинальное значение чувствительности, составляющее  герц/вольт (Гц/В), которое указывает пропорциональность между входным напряжением и частотой генерации выходного напряжения ведущего генератора 100.
герц/вольт (Гц/В), которое указывает пропорциональность между входным напряжением и частотой генерации выходного напряжения ведущего генератора 100.
Ведомый генератор 102, управляемый напряжением (ГУН), выдает колеблющийся выходной сигнал, частота которого зависит от входного сигнала напряжения,  , ведомого ГУН 102. Ведомый ГУН 102 в общем случае имеет номинальное значение чувствительности, составляющее КV герц/вольт (Гц/В), которое указывает пропорциональность между входным напряжением и частотой генерации выходного напряжения ведомого ГУН 102.
, ведомого ГУН 102. Ведомый ГУН 102 в общем случае имеет номинальное значение чувствительности, составляющее КV герц/вольт (Гц/В), которое указывает пропорциональность между входным напряжением и частотой генерации выходного напряжения ведомого ГУН 102.
Ведущий генератор 100 в типичном случае генерирует очень стабильно, но на частоты, на которых он может генерировать, накладывается некоторое ограничение. В отличие от этого, для ведомого ГУН 102 в типичном случае характерна значительная гибкость применительно к частотам, на которых он может генерировать, но его генерирование нестабильно. Контур 150 фазовой автоподстройки частоты представляет собой цепь, посредством которой предпринимается попытка получить преимущество наилучших свойств ведущего генератора 100 и ведомого ГУН 102, но без ограничений, характерных для них обоих.
Выходной сигнал контура 150 фазовой автоподстройки частоты, который также является выходным сигналом ГУН 102, подается в блок 104 «деления» частоты «на N» (блок (1/N)-деления частоты). Блок 104 «деления» частоты «на N» принимает в качестве входного сигнала напряжение, имеющее частоту f1, и передает в качестве выходного сигнала «деленную на N» версию сигнала частоты f1. Выходной сигнал блока 104 (1/N)-деления частоты подается на один вход дифференциального частотно-фазового контроллера 106 напряжения. Выходной сигнал ведущего генератора 100 подается на другой вход дифференциального частотно-фазового контроллера 106 напряжения.
Дифференциальный частотно-фазовый контроллер 106 напряжения представлен в виде суммирующего соединения в конфигурации с отрицательной обратной связью. Эта конфигурация указывает, что дифференциальный частотно-фазовый контроллер 106 напряжения будет выдавать, по существу, постоянный выходной сигнал (например, нулевой), если оба входных сигнала являются одинаковыми, но будет создавать некоторое изменение в своем входном сигнале, если два его входных сигнала окажутся разными. Например, в ситуации, когда дифференциальный частотно-фазовый контроллер 106 напряжения обнаруживает, что сигнал напряжения, выходящий из блока 104 (1/N)-деления частоты, представляет собой «задержанный по фазе» сигнал напряжения, выходящий из ведущего генератора 100, то дифференциальный частотно-фазовый контроллер 106 напряжения должен немного увеличить свое выходное напряжение, чтобы вызвать соответствующее увеличение выходной частоты сигнала, выдаваемого ведомым ГУН 102. И, наоборот, в ситуации, когда дифференциальный частотно-фазовый контроллер 106 напряжения обнаруживает, что сигнал напряжения, выходящий из блока 104 (1/N)-деления частоты, представляет собой «опережающий по фазе» сигнал напряжения, выходящий из ведущего генератора 100, то дифференциальный частотно-фазовый контроллер 106 напряжения должен немного уменьшить свое выходное напряжение, чтобы вызвать соответствующее уменьшение выходной частоты сигнала, выдаваемого ведомым ГУН 102.
Отметим, что даже когда дифференциальный частотно-фазовый контроллер 106 напряжения в самом деле обнаруживает разность частот, если появляющаяся разность частот рассматривается «относительно» опорной частоты 100 кГц, формируемой ведущим генератором 100, то с точки зрения дифференциального частотно-фазового контроллера 106 напряжения ситуация является такой, «будто» выходной сигнал блока 104 (1/10)-деления частоты находится «не в фазе» (например, «задержан по фазе» или «опережает по фазе») с сигналом опорной частоты 100 кГц. Вот почему обычные специалисты в данной области техники часто называют блок дифференциального частотно-фазового детектора (см. фиг. 3) дифференциального частотно-фазового контроллера 106 напряжения просто «фазовым детектором».
Единственным еще не рассмотренным прямоугольником на схеме является прямоугольник контурного фильтра 108. Как отмечалось выше, дифференциальный частотно-фазовый контроллер 106 напряжения определяет разность по частоте и фазе между своими входными сигналами и выдает сигнал напряжения, соответствующий этой разности, в более или менее реальном масштабе времени. Также отмечалось, что этот входной сигнал дифференциального частотно-фазового контроллера 106 напряжения, в конечном счете, используется для возбуждения ведомого ГУН 102. Если ведомый ГУН 102 выполнен с возможностью реагирования на каждую происходящую в реальном масштабе времени флуктуацию напряжения дифференциального частотно-фазового контроллера 106 напряжения, то ведомый ГУН 102 часто будет «реагировать слишком резко» и формировать относительно нестабильный выходной сигнал напряжения. Лучшая стабильность достигается, когда ведомый ГУН 102 делают «менее чувствительным» к быстрее происходящим изменениям выходного сигнала напряжения дифференциального частотно-фазового контроллера 106 напряжения. Это достигается путем установки контурного фильтра 108 между дифференциальным частотно-фазовым контроллером 106 напряжения и входом напряжения V
ГУН ведомого ГУН 102, при этом контурный фильтр 108 отсеивает или «отфильтровывает» любые быстрые изменения выходного напряжения дифференциального частотно-фазового контроллера 106 напряжения, которые создают тенденцию к изменчивому поведению выходного сигнала ведомого ГУН 102 (а значит, и выходного сигнала контура 150 фазовой автоподстройки частоты).
Автор изобретения осознал потребности техники, связанные со стабильностью контуров фазовой автоподстройки частоты, и разработал способы и устройства для удовлетворения этих потребностей. Поскольку осознание таких потребностей представляет собой в данном случае часть изобретательского замысла, то эти осознанные потребности рассматриваются в нижеследующем подробном описании.
Сущность изобретения
В одном варианте осуществления предложена система связи, отличающаяся тем, что содержит ведущий генератор, имеющий выход, оперативно подключенный к первому входу фазового детектора; ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора; и модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора.
В другом варианте осуществления предложен способ управления системой связи, заключающийся в том, что регулируют коэффициент передачи при прямой связи контура фазовой автоподстройки частоты в ответ на сигнал исходной ошибки контура фазовой автоподстройки частоты; и регулируют ведомый генератор контура фазовой автоподстройки частоты в ответ на коэффициент передачи при прямой связи.
В другом варианте осуществления предложена система связи, содержащая ведущий генератор, имеющий выход, оперативно подключенный к первому входу фазового детектора; ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора; и модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора.
В другом варианте осуществления предложен способ управления системой связи, заключающийся в том, что регулируют коэффициент передачи при прямой связи контура фазовой автоподстройки частоты в ответ на сигнал фильтрованной ошибки контура фазовой автоподстройки частоты; формируют сигнал фильтрованной ошибки, в котором подавлены помехи; и регулируют ведомый генератор контура фазовой автоподстройки частоты в ответ на коэффициент передачи при прямой связи и сигнал фильтрованной ошибки, в котором подавлены помехи.
Вышеизложенное представляет собой краткое изложение сущности изобретения и поэтому предусматривает - по необходимости - упрощения, обобщения и пропуски подробностей; следовательно, специалисты в данной области техники поймут, что это краткое изложение сущности изобретения носит лишь иллюстративный, но ни в коей мере не ограничительный характер. Другие аспекты, изобретательские признаки и преимущества описываемых здесь устройств и/или способов, определяемые исключительно формулой изобретения, станут очевидными при рассмотрении подробного описания изобретения, носящего неограничительный характер и приводимого ниже.
Краткое описание чертежей
На фиг. 1 представлен в виде блок-схемы контур фазовой автоподстройки частоты.
На фиг. 2 показана блок-схема высокого уровня контура фазовой автоподстройки частоты, в котором используется двухточечная модуляция.
На фиг. 3 показана блок-схема контура фазовой автоподстройки частоты, которая представлена в формате преобразования Лапласа.
На фиг. 4 показана условная схема одной реализации контурного фильтра.
На фиг. 5А изображена версия системы, альтернативная системе, изображенной на фиг. 2 - 4, причем эта альтернативная версия, по существу, представляет собой систему согласно фиг. 3, дополненную двумя избыточными сигналами: первым сигналом ξ, указывающим некоторое неуправляемое и неожиданное внешнее воздействие на систему (например, шум), и внутренним сигналом D, который предназначен для подавления остаточного воздействия сигнала ξ, которое не устранено противодействием контурного фильтра.
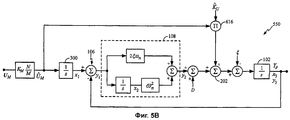
На фиг. 5В показана система согласно фиг. 5А, представленная таким образом, что специалисты в данной области техники воспримут ее как некий аналог реализации «стандартного уравнения» или «канонической» формы системы второго порядка, подвергнутой преобразованию Лапласа.
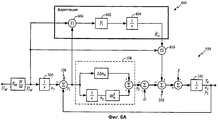
На фиг. 6А показана система, аналогичная изображенной на фиг. 5В, имеющая дополнительный модуль адаптации коэффициента передачи в прямом направлении.
На фиг. 6В изображена та система, которая проиллюстрирована на фиг. 6А, но показанная с дополнительно встроенными компонентами в модуле адаптации коэффициента передачи в прямом направлении.
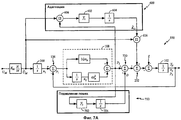
На фиг. 7А изображена система, несколько похожая на ту систему, которая проиллюстрирована на фиг. 6А, но с отличающимися соединениями и с дополнением в виде модуля подавления помех.
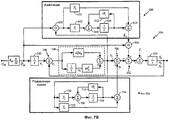
На фиг. 7В изображена система, несколько напоминающая ту систему, которая проиллюстрирована на фиг. 7А, но без дополнительных компонентов.
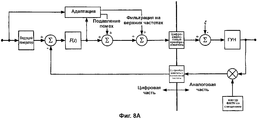
На фиг. 8А показана система, которая благоприятствует в основном цифровой реализации.
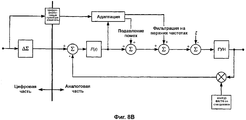
На фиг. 8В изображена система, которая благоприятствует в основном аналоговой реализации.
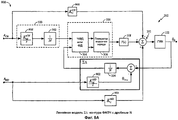
На фиг. 9А показана система, имеющая контур фазовой автоподстройки частоты, в чем-то аналогичный контуру фазовой автоподстройки частоты, проиллюстрированному на фиг. 3 и описанному в связи с ней, но дополненная линейной моделью ∑Δ-модулятора.
На фиг. 9В показана система, имеющая контур фазовой автоподстройки частоты, который, по существу, математически эквивалентен контуру фазовой автоподстройки частоты согласно фиг. 9А, но который изменен таким образом, что контур фазовой автоподстройки частоты, представляемый на фиг. 9В, имеет топологию, по существу, аналогичную контуру фазовой автоподстройки частоты согласно фиг. 5А.
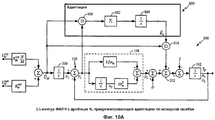
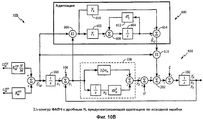
На фиг. 10А показана система, имеющая ∑Δ-контур фазовой автоподстройки частоты с дробным N согласно фиг. 9В, но с дополнительным модулем адаптации коэффициента передачи в прямом направлении, реализующим правило, касающееся системы, адаптируемой по вышеописанной исходной ошибке, и описанное в связи с фиг. 6В.
На фиг. 10В изображена система согласно фиг. 10А, имеющая дополнительные компоненты в модуле адаптации коэффициента передачи в прямом направлении.
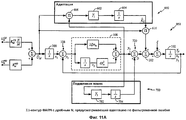
На фиг. 11А показана система, имеющая ∑Δ-контур фазовой автоподстройки частоты с дробным N согласно фиг. 9В, но с дополнительными модулями, способствующими реализации правил, касающихся системы, адаптируемой по вышеописанной фильтрованной ошибке, и описанных в связи с фиг. 7А.
На фиг. 11В проиллюстрировано представление системы, несколько похожей на систему, изображенную на фиг. 11А, но без дополнительных компонентов.
Использование одинаковых символов на разных чертежах, как правило, свидетельствует о том, что речь идет о сходных или идентичных элементах.
Подробное описание
I. Неадаптируемая система
На фиг. 2 показана блок-схема высокого уровня контура 250 фазовой автоподстройки частоты, в котором используется двухточечная модуляция. Входной сигнал напряжения,  , ведущего генератора 100 поступает в усилитель 200 с регулируемым коэффициентом усиления, причем этот усилитель 200 с регулируемым коэффициентом усиления имеет коэффициент
, ведущего генератора 100 поступает в усилитель 200 с регулируемым коэффициентом усиления, причем этот усилитель 200 с регулируемым коэффициентом усиления имеет коэффициент  передачи при прямой связи. Выходной сигнал усилителя 200 с регулируемым коэффициентом усиления поступает в суммирующее соединение 202, которое показано расположенным между контурным фильтром 108 и ведомым ГУН 102. Остальные компоненты контура 250 фазовой автоподстройки частоты функционируют так же, как описано в связи с фиг. 1.
передачи при прямой связи. Выходной сигнал усилителя 200 с регулируемым коэффициентом усиления поступает в суммирующее соединение 202, которое показано расположенным между контурным фильтром 108 и ведомым ГУН 102. Остальные компоненты контура 250 фазовой автоподстройки частоты функционируют так же, как описано в связи с фиг. 1.
Усилитель 200 с регулируемым коэффициентом усиления увеличивает общую рабочую полосу пропускания контура 250 фазовой автоподстройки частоты (т.е. полосу частот, в пределах которой контур 250 фазовой автоподстройки частоты жизнеспособен), делая ее больше той, которая связана с контуром 150 фазовой автоподстройки частоты согласно фиг. 1, если коэффициент  передачи при прямой связи задан соответствующим правильному значению. Существуют несколько разных методов для определения, по существу, оптимального значения коэффициента передачи при прямой связи. Например, чтобы существенно максимизировать общую рабочую полосу пропускания контура 250 фазовой автоподстройки частоты, можно использовать измерительные устройства (такие, как генератор или спектральный плотномер) для оперативного контроля сигналов, а коэффициент передачи при прямой связи можно регулировать вручную (например, посредством отвертки). Вместе с тем, технические специалисты обычно реализуют эти методы как специальные, а не в соответствии с какими-либо определенными инженерными правилами.
передачи при прямой связи задан соответствующим правильному значению. Существуют несколько разных методов для определения, по существу, оптимального значения коэффициента передачи при прямой связи. Например, чтобы существенно максимизировать общую рабочую полосу пропускания контура 250 фазовой автоподстройки частоты, можно использовать измерительные устройства (такие, как генератор или спектральный плотномер) для оперативного контроля сигналов, а коэффициент передачи при прямой связи можно регулировать вручную (например, посредством отвертки). Вместе с тем, технические специалисты обычно реализуют эти методы как специальные, а не в соответствии с какими-либо определенными инженерными правилами.
Автор описываемого здесь изобретения (далее в тексте - просто автор) разработал способы и соответствующие устройства для того, чтобы, по существу, максимизировать общую рабочую полосу пропускания контура фазовой автоподстройки частоты в соответствии с определенными правилами. Ниже приводится описание этих способов и устройств.
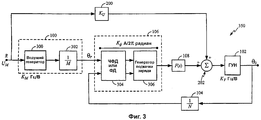
На фиг. 3 показана блок-схема контура 350 фазовой автоподстройки частоты, который представлен в формате преобразования Лапласа. В анализе цепей преобразование Лапласа используют для того, чтобы преобразовать систему целочисленных уравнений во временной области в систему алгебраических уравнений в частотной области. Поэтому решение относительно некоторой неизвестной величины сводится к преобразованию алгебраических уравнений. Как только выражение в частотной области для неизвестного получено, можно провести обратное преобразование снова во временную область, пользуясь известными методами. Цепи и устройства, реализующие описываемые здесь блок-схемы и подвергнутые преобразованию Лапласа, отображают их другие представления во временной области, и наоборот.
В связи с фиг. 3 отмечаем, что в одной реализации ведущий генератор 300 вместе с блоком 302 (1/М)-деления частоты образует ведущий генератор 100. В общем случае, блок 302 (1/М)-деления частоты придает стабильность ведущему генератору 100. Ведущий генератор 300 подключен к входу блока 302 «деления» частоты «на М» (блока 1/М)- деления частоты). Выход блока 302 (1/М)- деления частоты подключен к входу дифференциального фазочастотного контроллера 106 напряжения.
В одной реализации дифференциальный фазочастотный контроллер 106 напряжения состоит из дифференциального фазочастотного детектора 304, который питает генератор 306 подкачки заряда. Выход генератора 306 подкачки заряда подключен к входу контурного фильтра 108 (показанного представленным в s-области после преобразования Лапласа). Выход контурного фильтра 108 подключен к входу суммирующего соединения 202.
Выход усилителя 200 с регулируемым коэффициентом усиления подключен к выходу суммирующего соединения 202, а вход усилителя 200 с регулируемым коэффициентом усиления подключен к входу  ведущего генератора 300. Выход суммирующего соединения 202 подключен к входу ведомого ГУН 102. Выход ведомого ГУН 102 подключен к входу блока 104 «деления» частоты «на N» (блока (1/N)-деления частоты). Выход блока 104 «деления» частоты «на N» (блока (1/N)-деления частоты) подключен к входу дифференциального фазочастотного детектора 304.
ведущего генератора 300. Выход суммирующего соединения 202 подключен к входу ведомого ГУН 102. Выход ведомого ГУН 102 подключен к входу блока 104 «деления» частоты «на N» (блока (1/N)-деления частоты). Выход блока 104 «деления» частоты «на N» (блока (1/N)-деления частоты) подключен к входу дифференциального фазочастотного детектора 304.
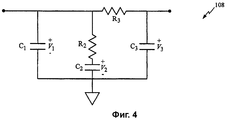
На фиг. 4 показана условная схема одной реализации контурного фильтра 108. Обычные специалисты в данной области техники поймут в связи с компонентами показанной схемы, что сопротивление R2 и емкость С2 управляют динамикой контура. Поэтому нижеследующие рассуждения приводятся в данном описании с учетом влияний только сопротивления R2 и емкости С2. Однако можно учесть при рассмотрении и другие компоненты, показанные на фиг. 4, особенно если осуществляется численное моделирование способов и устройств, иллюстрируемых и описываемых в данной заявке.
На фиг. 5А изображена альтернативная система 550. Альтернативная система 550, по существу, аналогична системе согласно фиг. 3, дополненной двумя избыточными сигналами: первым сигналом ξ, указывающим некоторое неуправляемое и неожиданное внешнее воздействие на систему (например, шум), и внутренним сигналом D, который предназначен для подавления остаточного воздействия сигнала ξ, которое не устранено противодействием контурного фильтра 108. Внутренний подавляющий сигнал D подробнее поясняется ниже в связи с фиг. 7А и 7В.
На фиг. 5В показана система согласно фиг. 5А, представленная таким образом, что специалисты в данной области техники воспримут ее как некий аналог реализации «стандартного уравнения» или «канонической» формы системы второго порядка, подвергнутой преобразованию Лапласа. Соответствующее стандартному или каноническому уравнению представление согласно фиг. 5В эквивалентно представлению согласно фиг. 5А, но его проще преобразовывать и сравнивать, чем систему, представленную не в канонической форме, потому что во многих методах преобразования систем используется номенклатура, аналогичная той, которая представлена на фиг. 5В. Представление согласно фиг. 5В является результатом математических подстановок и алгебраических преобразований, подробности которых не рассматриваются в данном описании. Кроме того, как будет показано ниже, представление системы в виде, соответствующем фиг. 5В, позволяет записать некоторые уравнения состояния путем проверки, которая в одной реализации доказывает свою состоятельность. Даже несмотря на то что нижеследующие величины описываются в канонической форме, они, по существу, эквивалентны своим неканоническим формам, а такие неканонические эквиваленты можно определить посредством стандартных способов преобразования. Канонические формы используются в данном описании в качестве средства облегчения понимания и преобразования.
Представление согласно фиг. 5В можно приравнять представлению согласно фиг. 5А посредством соотношений:
|
|
(1) |
|
|
(2) |
|
|
(3) |
Обычные специалисты в данной области техники поймут, что в случае D=ξ можно проанализировать систему согласно фиг. 5В, чтобы вывести следующую передаточную функцию:
 |
(4) |
Из этой передаточной функции видно, что если канонический коэффициент передачи при прямой связи определяется как  =1, то передаточная функция системы будет сведена к выражению ((KMN/M) Гц/В)∗(1/s), которое представляет собой подвергнутое преобразованию Лапласа представление генератора, управляемого напряжением, имеющего чувствительность KMN/M Гц/В. Автор установил, что было бы выгодно иметь передаточную функцию системы согласно фиг. 5В меньшей, чем передаточная функция почти идеального генератора. Вследствие этого, автор выдвинул гипотезу, что преимущественная форма адаптации должна быть такой, которая, по существу, поддерживала бы на уровне значения единица или один (1) или близким к этому значению, потому что такое значение способствовало бы тому, чтобы сделать поведение системы согласно фиг. 5А-5В приближающимся к поведению почти идеального генератора.
=1, то передаточная функция системы будет сведена к выражению ((KMN/M) Гц/В)∗(1/s), которое представляет собой подвергнутое преобразованию Лапласа представление генератора, управляемого напряжением, имеющего чувствительность KMN/M Гц/В. Автор установил, что было бы выгодно иметь передаточную функцию системы согласно фиг. 5В меньшей, чем передаточная функция почти идеального генератора. Вследствие этого, автор выдвинул гипотезу, что преимущественная форма адаптации должна быть такой, которая, по существу, поддерживала бы на уровне значения единица или один (1) или близким к этому значению, потому что такое значение способствовало бы тому, чтобы сделать поведение системы согласно фиг. 5А-5В приближающимся к поведению почти идеального генератора.
II. Адаптируемые системы
Как отмечалось выше, если канонический коэффициент передачи при прямой связи поддерживается на уровне приблизительно один (1), поведение системы согласно фиг. 5А-5В приближается к поведению почти идеального генератора, управляемого напряжением, имеющего чувствительность KMN/M Гц/В. Автор разработал две основных схемы адаптации, которые способствуют тому, чтобы система согласно фиг. 5А-В повела себя как почти идеальная система: схему адаптации по исходной ошибке и схему адаптации по фильтрованной ошибке.
А. Система, адаптируемая по исходной ошибке
Как уже отмечалось, автор установил, что желательно, чтобы канонический коэффициент передачи при прямой связи был таким, чтобы передаточная функция системы, показанной на фиг. 5В, предпочтительно сводилась к передаточной функции почти идеального генератора. Автор разработал правило, которое можно использовать, чтобы поддерживать канонический коэффициент передачи при прямой связи таким, чтобы передаточная функция системы, показанной на фиг. 5В, предпочтительно сводилась к передаточной функции почти идеального генератора. Это правило выглядит следующим образом:
|
|
(5) |
Уравнения адаптации выводятся при условии, что скорость изменения энергии ошибки (исходной или фильтрованной) всегда является отрицательной. То есть, во времени ошибка стремится к нулю.
На фиг. 6А показана система согласно фиг. 5В, имеющая дополнительный модуль 600 адаптации коэффициента передачи в прямом направлении, который реализует вышеизложенное правило. На словах, правило исходной ошибки гласит, что в одной реализации канонический коэффициент  передачи при прямой связи, который будет способствовать поведению системы как почти идеального генератора, можно найти путем интегрирования γ1 раз произведения канонического входного сигнала
передачи при прямой связи, который будет способствовать поведению системы как почти идеального генератора, можно найти путем интегрирования γ1 раз произведения канонического входного сигнала  и сигнала у1 исходной ошибки. В правиле исходной ошибки, γ1 есть положительная константа, которая помогает определить быстроту адаптации. Правило исходной ошибки основано на аргументах стабильности и предназначено для того, чтобы сделать вероятной ситуацию, когда вся совокупность системы адаптации и контура фазовой автоподстройки частоты стабильна при всех значениях
и сигнала у1 исходной ошибки. В правиле исходной ошибки, γ1 есть положительная константа, которая помогает определить быстроту адаптации. Правило исходной ошибки основано на аргументах стабильности и предназначено для того, чтобы сделать вероятной ситуацию, когда вся совокупность системы адаптации и контура фазовой автоподстройки частоты стабильна при всех значениях
γ1. В связи с фиг. 6А нужно отметить, что компонентами, которые, по существу, реализуют правило адаптации по исходной ошибке, являются блок 606 умножения с опережением по фазе, усилитель 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, имеющий коэффициент усиления γ1, и интегратор 604 модуля адаптации коэффициента передачи в прямом направлении.
Продолжая рассматривать фиг. 6А, отмечаем, что канонический входной сигнал  подключен к входу блока 606 умножения с опережением по фазе. Вывод исходной ошибки у1 (т.е. тот, на котором имеется сигнал у1 исходной ошибки) подключен к входу блока 606 умножения с опережением по фазе. Выход блока 606 умножения с опережением по фазе подключен к входу усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, имеющего коэффициент усиления γ1. Выход усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи подключен к входу интегратора 604 модуля адаптации коэффициента передачи в прямом направлении. К входу блока 616 умножения с отставанием по фазе подключены и выход интегратора 604 модуля адаптации коэффициента передачи в прямом направлении, и каноническая версия входного сигнала
подключен к входу блока 606 умножения с опережением по фазе. Вывод исходной ошибки у1 (т.е. тот, на котором имеется сигнал у1 исходной ошибки) подключен к входу блока 606 умножения с опережением по фазе. Выход блока 606 умножения с опережением по фазе подключен к входу усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, имеющего коэффициент усиления γ1. Выход усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи подключен к входу интегратора 604 модуля адаптации коэффициента передачи в прямом направлении. К входу блока 616 умножения с отставанием по фазе подключены и выход интегратора 604 модуля адаптации коэффициента передачи в прямом направлении, и каноническая версия входного сигнала  . Выход блока 616 умножения с отставанием по фазе оперативно соединен с входом суммирующего соединения 202. Что касается остальных компонентов системы, то система функционирует так, как было показано и описано выше.
. Выход блока 616 умножения с отставанием по фазе оперативно соединен с входом суммирующего соединения 202. Что касается остальных компонентов системы, то система функционирует так, как было показано и описано выше.
Хотя это и не показано явно на чертежах, в других реализациях имеется фильтр, по существу, аналогичный контурному фильтру 108 и заключенный между блоком 606 умножения с опережением по фазе и усилителем 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении. Следовательно, где бы ни появились и где бы ни рассматривались в данном описании блок 606 умножения с опережением по фазе и усилитель 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, следует понять, что в альтернативных реализациях имеется фильтр, по существу, аналогичный контурному фильтру 108 и заключенный между блоком 606 умножения с опережением по фазе и усилителем 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении.
Хотя здесь описываются усилители с регулируемым коэффициентом усиления пропорционального вклада (например, усилитель 610 с регулируемым коэффициентом усиления пропорционального вклада, описанный ниже, и усилитель 710 с регулируемым коэффициентом усиления пропорционального вклада, описанный ниже), обычные специалисты в данной области техники поймут, что такие усилители с регулируемым коэффициентом усиления пропорционального вклада, появляющиеся и описываемые здесь, должны быть представителями контроллеров, таких как пропорционально-интегральные (ПИ) контроллеры и пропорционально-интегрально-дифференциальные (ПИД) контроллеры.
Хотя генераторы, управляемые напряжением, на самом деле являются нелинейными, существуют известные диапазоны операций генераторов, управляемых напряжением, которые в инженерных целях можно рассматривать как, по существу, линейные. Вследствие этого, в приводимых здесь рассуждениях генераторы, управляемые напряжением, рассматриваются как, по существу, линейные, что часто делается в инженерных приложениях. Хотя здесь описывается использование схем «деления на N», в других приложениях генераторы, управляемые напряжением, предусматривают преобразование с понижением частоты и имеют смесители, а не схемы «деления на N».
Автор обнаружил, что на практике ведомый ГУН 102 может иметь отклик, который не полностью моделируется посредством идеального генератора (такого, как показанный на фиг. 6А) или который может иметь немоделируемую динамику, как дополнительные компоненты в контурном фильтре согласно фиг. 6А, и что эти различия между реальными системами и моделируемыми системами ограничивают максимальную величину γ1, при которой будет оставаться жизнеспособным контур фазовой автоподстройки частоты согласно фиг. 6А. Автор обнаружил, что в таких реальных жизненных ситуациях выгодно дополнять правило исходной ошибки пропорциональным вкладом (γ2) и коэффициентом «утечки» (δ1). Автор подчеркивает, что с эвристической точки зрения можно считать пропорциональное управление используемым для ускорения адаптации, а коэффициент утечки можно считать отражающим один из нескольких способов придания адаптивной системе робастности к помехам и немоделируемой динамике. Описание альтернативной системы, реализующей пропорциональный вклад и дополнение коэффициентом утечки базового вышеописанного правила исходной ошибки, приводится ниже и иллюстрируется с помощью фиг. 6В.
На фиг. 6В изображена та система, которая проиллюстрирована на фиг. 6А, показанная с дополнительно встроенными компонентами в модуле 600 адаптации коэффициента передачи в прямом направлении. Как можно увидеть из фиг. 6В, в этой реализации возбуждение, по меньшей мере - частичное, модуля 600 адаптации коэффициента передачи в прямом направлении таково, что это возбуждение можно характеризовать как сигнал у1 «исходной ошибки». Сигнал у1 называется в данном описании сигналом «исходной ошибки», чтобы отличить его от сигнала, называемого в данном описании сигналом у2 «фильтрованной ошибки».
Продолжая рассматривать фиг. 6В, отмечаем, что канонический входной сигнал  подключен к входу блока 606 умножения с опережением по фазе. Сигнал у1 исходной ошибки подключен к входу блока 606 умножения с опережением по фазе. Выход блока 606 умножения с опережением по фазе подключен к входу усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, имеющего коэффициент усиления γ1. Выход усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении подключен к входу суммирующего соединения 608. Выход суммирующего соединения 608 подключен к входу интегратора 604 модуля адаптации коэффициента передачи в прямом направлении. Выход интегратора 604 модуля адаптации коэффициента передачи в прямом направлении подключен посредством отрицательной обратной связи к входу суммирующего соединения 608, при этом отрицательная обратная связь обеспечивается усилителем 612 с регулируемым коэффициентом усиления коэффициента утечки, имеющим коэффициент усиления σ1.
подключен к входу блока 606 умножения с опережением по фазе. Сигнал у1 исходной ошибки подключен к входу блока 606 умножения с опережением по фазе. Выход блока 606 умножения с опережением по фазе подключен к входу усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, имеющего коэффициент усиления γ1. Выход усилителя 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении подключен к входу суммирующего соединения 608. Выход суммирующего соединения 608 подключен к входу интегратора 604 модуля адаптации коэффициента передачи в прямом направлении. Выход интегратора 604 модуля адаптации коэффициента передачи в прямом направлении подключен посредством отрицательной обратной связи к входу суммирующего соединения 608, при этом отрицательная обратная связь обеспечивается усилителем 612 с регулируемым коэффициентом усиления коэффициента утечки, имеющим коэффициент усиления σ1.
Выход интегратора 604 модуля адаптации коэффициента передачи в прямом направлении подключен к входу суммирующего соединения 614. К входу суммирующего соединения 614 также подключен выход усилителя 610 с регулируемым коэффициентом усиления пропорционального вклада, имеющий коэффициент усиления γ2. Вход усилителя 610 с регулируемым коэффициентом усиления пропорционального вклада подключен к выходу блока 606 умножения с опережением по фазе.
Выход суммирующего соединения 614 подключен к входу блока 616 умножения с отставанием по фазе. К входу блока 616 умножения с отставанием по фазе подключен канонический входной сигнал  . Выход блока 616 умножения с отставанием по фазе соединен с входом суммирующего соединения 202. Что касается остальных компонентов системы, то система функционирует так же, как описано выше.
. Выход блока 616 умножения с отставанием по фазе соединен с входом суммирующего соединения 202. Что касается остальных компонентов системы, то система функционирует так же, как описано выше.
Б. Система, адаптируемая по фильтрованной ошибке
Можно интуитивно заметить, что адаптации с использованием сигнала у2 фильтрованной ошибки следует отдать предпочтение перед использованием сигнала у1 исходной ошибки для адаптации системы. Однако, когда автор попытался использовать сигнал у2 фильтрованной ошибки для проведения адаптации, он неожиданно обнаружил, что адаптация становится исключительно чувствительной к первому сигналу ξ, который используется для указания некоторого неуправляемого и неожиданного внешнего воздействия на систему (например, шума). Поэтому автор предложил использовать внутренний подавляющий сигнал D, который предназначен для подавления воздействия сигнала ξ, которое не устранено противодействием контурного фильтра 108.
В свете вышеизложенного автор разработал два правила, которые можно использовать для создания системы, передаточная функция которой приближается к передаточной функции идеального генератора. Эти два правила имеют следующий вид:
|
|
(6) |
|
|
(7) |
Уравнения адаптации выводятся при условии, что скорость изменения энергии ошибки (исходной или фильтрованной) всегда является отрицательной. То есть, во времени ошибка стремится к нулю.
На фиг. 7А изображены модули 600 и 700, которые реализуют вышеописанные правила. На словах, правило фильтрованной ошибки гласит, что в одной реализации систему согласно фиг. 7А можно сделать приближающейся к поведению идеального генератора при условии, что канонический коэффициент  передачи при прямой связи находят путем интегрирования γ1 раз произведения канонического входного сигнала
передачи при прямой связи находят путем интегрирования γ1 раз произведения канонического входного сигнала  и сигнала у2 фильтрованной ошибки, а также при условии, что в систему вводят коэффициент D подавления помех, находимый путем интегрирования γ3 раз сигнала у2 фильтрованной ошибки. В правиле фильтрованной ошибки γ1 и γ3 есть положительные константы, которые помогают определить быстроту адаптации. Компонентами, которые, по существу, реализуют правило адаптации по фильтрованной ошибке, являются компоненты модуля 600 адаптации коэффициента передачи в прямом направлении, а именно блок 606 умножения с опережением по фазе, усилитель 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, имеющий коэффициент усиления γ1, и интегратор 604 модуля адаптации коэффициента передачи в прямом направлении, а также компоненты модуля 700 подавления помех, то есть усилитель 702 с регулируемым коэффициентом усиления модуля подавления помех, имеющий коэффициент усиления γ3, и интегратор 704 модуля подавления помех.
и сигнала у2 фильтрованной ошибки, а также при условии, что в систему вводят коэффициент D подавления помех, находимый путем интегрирования γ3 раз сигнала у2 фильтрованной ошибки. В правиле фильтрованной ошибки γ1 и γ3 есть положительные константы, которые помогают определить быстроту адаптации. Компонентами, которые, по существу, реализуют правило адаптации по фильтрованной ошибке, являются компоненты модуля 600 адаптации коэффициента передачи в прямом направлении, а именно блок 606 умножения с опережением по фазе, усилитель 602 с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, имеющий коэффициент усиления γ1, и интегратор 604 модуля адаптации коэффициента передачи в прямом направлении, а также компоненты модуля 700 подавления помех, то есть усилитель 702 с регулируемым коэффициентом усиления модуля подавления помех, имеющий коэффициент усиления γ3, и интегратор 704 модуля подавления помех.
Система, показанная на фиг. 7А, похожа на ту систему, которая проиллюстрирована на фиг. 6А, но имеет отличающиеся соединения и дополнение в виде модуля 700 подавления помех. Как можно увидеть из фиг. 6А, возбуждение, по меньшей мере - частичное, модуля 600 адаптации коэффициента передачи в прямом направлении таково, что специалисты в данной области техники могут характеризовать это возбуждение как сигнал у2 фильтрованной ошибки. То есть, тогда как на фиг. 6А одним входным сигналом в блок 606 умножения с опережением по фазе был сигнал у1 исходной ошибки, на фиг. 7А тот же сигнал теперь показан в виде сигнала у2 фильтрованной ошибки. С другой стороны, соединения являются такими же, как те, которые показаны на фиг. 6А и описаны в связи с ней, поэтому обсуждение компонентов рассматриваемого чертежа, общих с фиг. 6А, повторено не будет.
Продолжая рассматривать фиг. 7А, отмечаем в отношении модуля 700 подавления помех, что сигнал у2 фильтрованной ошибки подключен к входу усилителя 702 с регулируемым коэффициентом усиления модуля подавления помех, имеющего коэффициент усиления γ3. Выход усилителя 702 с регулируемым коэффициентом усиления модуля подавления помех, имеющего коэффициент усиления γ3, подключен к входу интегратора 704 модуля подавления помех. Выход интегратора 704 модуля подавления помех подключен к входу суммирующего соединения 720.
К входу суммирующего соединения 720 подключен сигнал у2 фильтрованной ошибки. Выход суммирующего соединения 720 соединен с входом суммирующего соединения 202. Что касается остальных компонентов системы, то система функционирует так, как было показано и описано выше.
Как и в случае правила исходной ошибки, автор обнаружил, что на практике прибор (ведомый ГУН) 102 может иметь отклик, который не полностью моделируется посредством идеального генератора (такого, как показанный на фиг. 7А) или который может иметь немоделируемую динамику, как дополнительные компоненты в контурном фильтре 108, и что эти различия между реальными системами и моделируемыми системами ограничивают максимальную величину γ3, при которой будет оставаться жизнеспособной система согласно фиг. 7А. Автор обнаружил, что в таких реальных жизненных ситуациях выгодно дополнять правило фильтрованной ошибки коэффициентами (γ2, γ4) пропорционального вклада и коэффициентами (δ1, δ2) утечки. Описание альтернативной системы, реализующей пропорциональный вклад и дополнение коэффициентом утечки базового вышеописанного правила фильтрованной ошибки, приводится ниже и иллюстрируется с помощью фиг. 7В.
На фиг. 7В изображена система, немного напоминающая систему, проиллюстрированную на фиг. 7А, но показанная с дополнительно встроенными компонентами в модулях 600 и 700. Как можно увидеть из фиг. 7В, в этой реализации модуль 600 адаптации коэффициента передачи в прямом направлении аналогичен тому, который показан на фиг. 6В, но его возбуждение, по меньшей мере - частичное, таково, что специалисты в данной области техники смогут охарактеризовать это возбуждение как сигнал у2 фильтрованной ошибки. То есть, тогда как на фиг. 6В одним входным сигналом в блок 606 умножения с опережением по фазе был сигнал у1 исходной ошибки, на фиг. 7В тот же сигнал теперь показан в виде сигнала у2 фильтрованной ошибки. С другой стороны, соединения являются такими же, как те, которые показаны на фиг. 6В и описаны в связи с ней, поэтому обсуждение компонентов рассматриваемого чертежа, общих с фиг. 6В, повторено не будет.
Продолжая рассматривать фиг. 7В, отмечаем в отношении модуля 700 подавления помех, что сигнал у2 фильтрованной ошибки подключен к входу усилителя 702 с регулируемым коэффициентом усиления модуля подавления помех, имеющего коэффициент усиления γ3. Выход усилителя 702 с регулируемым коэффициентом усиления модуля подавления помех, имеющего коэффициент усиления γ3, подключен к входу суммирующего соединения 708. Выход суммирующего соединения 708 подключен к входу интегратора 704 модуля подавления помех. Выход интегратора 704 модуля подавления помех подключен посредством отрицательной обратной связи к входу суммирующего соединения 708, при этом отрицательная обратная связь обеспечивается усилителем 712 с регулируемым коэффициентом усиления коэффициента утечки модуля подавления помех, имеющим коэффициент усиления σ3.
Выход интегратора 704 модуля подавления помех подключен к входу суммирующего соединения 714. К входу суммирующего соединения 714 также подключен выход усилителя 710 с регулируемым коэффициентом усиления пропорционального вклада модуля подавления помех, имеющего коэффициент усиления γ4. К входу усилителя 710 с регулируемым коэффициентом усиления пропорционального вклада модуля подавления помех подключен сигнал у2 «фильтрованной ошибки».
Выход суммирующего соединения 714 подключен к входу суммирующего соединения 720. К входу суммирующего соединения 720 подключен сигнал у2 фильтрованной ошибки. Вход суммирующего соединения 720 соединен с входом суммирующего соединения 202. Что касается остальных компонентов системы, то система функционирует так, как было показано и описано выше.
Обычные специалисты в данной области техники поймут, что состояние техники уже достигло того момента, когда существует некоторое различие между аппаратной и программной реализациями аспектов системы; использование аппаратного обеспечения и программного обеспечения в общем случае (но не всегда, потому что в некоторых контекстах выбор между аппаратным обеспечением и программным обеспечением может стать существенным) представляет собой конструкторский выбор, отражающий компромиссы между затратами и эффективностью. Обычные специалисты в данной области техники поймут, что существуют различные средства (например, аппаратное обеспечение, программное обеспечение, программно-аппаратное обеспечение), с помощью которых можно реализовать аспекты описываемых здесь способов и/или систем, и что предпочтительное средство будет меняться в соответствии с контекстом, в котором применяются эти способы и/или системы. Например, если конструктор определяет, что основополагающими параметрами являются скорость и точность, то этот конструктор может предпочесть средства аппаратного обеспечения и/или средства программно-аппаратного обеспечения; в альтернативном варианте, если основополагающей является гибкость, то конструктор может предпочесть именно программную реализацию; или, в еще одном альтернативном варианте, конструктор может предпочесть некоторую комбинацию аппаратного обеспечения, программного обеспечения и программно-аппаратного обеспечения. В данном случае имеется несколько возможных средств, с помощью которых можно воплотить аспекты описываемых здесь способов и систем, ни одно из которых не представляется явно предпочтительным над другими, потому что любое используемое средство отражает выбор, зависимый от контекста, в котором это средство будет использоваться, и конкретных параметров (например, скорости, гибкости или прогнозируемости), которые предпочтет конструктор и которые могут меняться.
В вышеизложенном подробном описании приведены различные варианты осуществления устройств и/или способов посредством использования блок-схем, схем последовательности операций и примеров. Постольку, поскольку такие блок-схемы, схемы последовательности операций и примеры содержат одну или более функций и/или операций, специалисты в данной области техники воспримут как общеизвестную информацию о том, что каждая функция и/или операция в таких блок-схемах, схемах последовательностей операций или примерах может быть реализована, отдельно и/или в совокупности, с помощью широкого диапазона средств аппаратного обеспечения, программного обеспечения, программно-аппаратного обеспечения или, по существу, любой комбинации названных средств. В одном варианте настоящее изобретение может быть реализовано посредством интегральных схем прикладной ориентации (ИСПО). Вместе с тем, специалисты в данной области техники поймут, что описываемые здесь варианты осуществления - в целом или частично - могут быть с равным успехом реализованы в стандартных интегральных схемах, в виде одной или более компьютерных программ, выполняемых на одном или более компьютеров (например, одной или более компьютерных программ, выполняемых на одной или более компьютерных систем), в виде одной или более программ, выполняемых на одном или более контроллеров (например, микроконтроллеров), в виде одной или более программ, выполняемых на одном или более процессоров (например, микропроцессоров или цифровых процессоров сигналов), в виде программно-аппаратного обеспечения или в виде, по существу, любой комбинации названных средств, и что разработку схем и/или написание кода для программного обеспечения и/или программно-аппаратного обеспечения следует считать - в свете этого описания - находящейся или находящимся в рамках квалификации обычных специалистов в данной области техники. Кроме того, специалисты в данной области техники поймут, что механизмы согласно настоящему изобретению можно распространять в качестве программного продукта во множестве форм и что иллюстративный вариант осуществления настоящего изобретения применим с равным успехом безотносительно конкретного типа носителей сигналов, используемых для практического осуществления этого распространения. Примеры носителей сигналов включают в себя - но не в ограничительном смысле - следующие: перезаписываемые носители, такие как флоппи-диски, накопители на жестких дисках, CD ROM, цифровую ленту и компьютерную память, и среды передачи, такие как цифровые и аналоговые линии связи, использующие мультиплексирование с временным разделением каналов (МВРК), или линии связи на основе Internet-протоколов (например, линии пакетной передачи).
В общем смысле, специалисты в данной области техники поймут, что описываемые здесь различные варианты осуществления - в целом или частично - могут быть реализованы в широком диапазоне средств аппаратного обеспечения, программного обеспечения, программно-аппаратного обеспечения или что можно рассмотреть любую комбинацию этих средств как состоящую из различных типов «электрических схем». Следовательно, в том смысле, в каком он употребляется в данном описании, термин «электрические схемы» включает в себя - но не в ограничительном смысле - электрические схемы, имеющие в своем составе, по меньшей мере, одну дискретную электрическую схему, электрические схемы, имеющие в своем составе, по меньшей мере, одну интегральную схему, электрические схемы, имеющие в своем составе, по меньшей мере, одну интегральную схему прикладной ориентации, электрические схемы, имеющие в своем составе, по меньшей мере, одно компьютерное устройство общего назначения, конфигурируемого компьютерной программой (например, компьютер общего назначения, конфигурируемый компьютерной программой, которая, по меньшей мере, частично обеспечивает реализацию описываемых здесь способов и/или устройств, или микропроцессор, конфигурируемый компьютерной программой, которая, по меньшей мере, частично обеспечивает реализацию описываемых здесь способов и/или устройств), электронные схемы, образующие запоминающее устройство (например, формы оперативного запоминающего устройства), и электрические схемы, образующие устройство связи (например, модем, коммутатор связи или оптико-электронные приборы).
Специалисты в данной области техники поймут, что такое описание рассматриваемых здесь устройств и/или способов, как в данной заявке, является общепринятой практикой, как и использование стандартных инженерных методов для внедрения таких устройств и/или способов в системы, которые в типичном случае являются частично аналоговыми, а частично - цифровыми. То есть, описываемые здесь устройства и/или способы можно внедрить в аналоговые и частично цифровые системы посредством проведения экспериментальных работ в целесообразном объеме, определяемом специалистами, имеющими обычную квалификацию в данной области техники. На фиг. 8А и 8В показаны примеры систем, в которые можно внедрить, по меньшей мере, часть описываемых здесь устройств и/или способов посредством проведения экспериментальных работ в целесообразном объеме.
На фиг. 8А показана система, которая пригодна, в частности, для цифровой реализации. На фиг. 8А отмечено разделение между цифровой и аналоговой частями. По выбору, система может включать в себя смеситель для преобразования выходного сигнала с понижением частоты. Ведущий генератор, контурный фильтр и схемы адаптации являются цифровыми. Выходной сигнал ГУН подается на ∑Δ-преобразователь с понижением частоты для формирования ошибки по отношению к цифровому генератору. Выходной сигнал контурного фильтра и схем адаптации преобразуется в аналоговый сигнал и подается на вход ГУН.
На фиг. 8В изображена система, которая пригодна, в частности, для аналоговой реализации. На фиг. 8В отмечено разделение между цифровой и аналоговой частями. Система согласно фиг. 8В отображает подход, альтернативный по отношению к продемонстрированному на фиг. 8А в том, что разделение согласно фиг. 8В благоприятствует реализации в виде аналоговых схем. Этот подход пригоден для тех алгоритмов адаптации, которые приводятся в данном описании.
Вариант осуществления ∑Δ-контура фазовой автоподстройки частоты с дробным N
Вместо рассмотренной выше непосредственной модуляции генератора можно модулировать контур фазовой автоподстройки частоты путем динамического изменения параметра N его делителя. В частности, можно управлять значением N с помощью ∑Δ-модулятора, чтобы обеспечить дробное, а не целое значение. Как и в вышерассмотренном контуре фазовой автоподстройки частоты, к таким ∑Δ-контурам фазовой автоподстройки частоты с дробным N можно применить двухточечную модуляцию, что теперь и будет показано.
На фиг. 9А показана система, имеющая контур 900 фазовой автоподстройки частоты, в чем-то аналогичный контуру 350 фазовой автоподстройки частоты, проиллюстрированному на фиг. 3 и описанному в связи с ней, но дополненную линейной моделью ∑Δ-модулятора. (Хотя ∑Δ-модулятор в типичном случае действует, изменяя параметр деления, характерный для контура, на фиг. 9А показана линеаризованная версия ∑Δ-модулятора, в которой (постоянная) N представляет номинальный параметр деления. Малые изменения в параметре деления представлены вносимой фазовой модуляцией θМОД.)
Хотя для ясности и простоты иллюстрации здесь показана и описана линеаризованная версия ∑Δ-модулятора, реальный ∑Δ-модулятор (в противоположность линейной модели, используемой при анализе) генерирует сигнал высокого разрешения, используя лишь несколько уровней. В частности, ∑Δ-модулятор обычно решает вышеописанную задачу путем размывания выходного сигнала между уровнями таким образом, что при фильтрации выходной сигнал имеет желаемое значение. В рассматриваемом здесь контексте ∑Δ-модулятор, как правило, реализуют на цифровых схемах. Затем параметр N деления размывают между несколькими дискретными значениями, так что требуемое значение генерируется при фильтрации посредством обеспечивающего фильтрацию нижних частот воздействия контура фазовой автоподстройки частоты. Соответственно, когда в данном описании показывают, описывают и/или ссылаются на линеаризованные - частично или полностью - ∑Δ-модуляторы, такие частично или полностью линеаризованные ∑Δ-модуляторы следует считать представляющими собой представителями частично или полностью линеаризованных аналитических версий ∑Δ-модуляторов, а также, по существу, всех частичных или полных реализаций физических компонентов ∑Δ-модуляторов.
Контур 900 фазовой автоподстройки частоты имеет два входных сигнала - верхний входной сигнал  и нижний входной сигнал
и нижний входной сигнал  . Верхний входной сигнал является постоянным и задает частоту канала. (То есть, частоту, вокруг которой центрирован модулированный спектр.) Нижний входной сигнал RMD изменяется во времени и вызывает частотную модуляцию ГУН 902. Эта частотная модуляция преобразуется в фазовую модуляцию θМОД и вводится в контур 900 фазовой автоподстройки частоты.
. Верхний входной сигнал является постоянным и задает частоту канала. (То есть, частоту, вокруг которой центрирован модулированный спектр.) Нижний входной сигнал RMD изменяется во времени и вызывает частотную модуляцию ГУН 902. Эта частотная модуляция преобразуется в фазовую модуляцию θМОД и вводится в контур 900 фазовой автоподстройки частоты.
Масштабированные версии верхнего входного сигнала  и нижнего входного сигнала
и нижнего входного сигнала  - с учетом того, что такое масштабирование соответственно управляется коэффициентом усиления
- с учетом того, что такое масштабирование соответственно управляется коэффициентом усиления  усилителя 908 с регулируемым коэффициентом усиления и коэффициентом
усилителя 908 с регулируемым коэффициентом усиления и коэффициентом  усилителя 904 с регулируемым коэффициентом усиления - вводятся на подключенном к суммирующему соединению 202 входе ГУН 102, чтобы обеспечить двухточечную модуляцию. Сравнение контура 900 фазовой автоподстройки частоты согласно фиг. 9А с контуром 350 фазовой автоподстройки частоты показывает, что такие контуры фазовой автоподстройки частоты оказываются существенно различающимися. В данном случае непросто понять, как описываемые здесь способы и устройства можно применить к контуру 900 фазовой автоподстройки частоты.
усилителя 904 с регулируемым коэффициентом усиления - вводятся на подключенном к суммирующему соединению 202 входе ГУН 102, чтобы обеспечить двухточечную модуляцию. Сравнение контура 900 фазовой автоподстройки частоты согласно фиг. 9А с контуром 350 фазовой автоподстройки частоты показывает, что такие контуры фазовой автоподстройки частоты оказываются существенно различающимися. В данном случае непросто понять, как описываемые здесь способы и устройства можно применить к контуру 900 фазовой автоподстройки частоты.
Чтобы преодолеть вышеуказанные затруднения, автор предложил преобразовать ∑Δ- контур 900 фазовой автоподстройки частоты с дробным N так, чтобы вышеописанные способы и устройства можно было применить к контуру 900 фазовой автоподстройки частоты. Это преобразование представляется следующим.
Продолжая рассматривать фиг. 9А, предположим, что
|
|
(8) |
|
|
(9) |
|
|
(10) |
В свете вышеизложенного отметим, что, с помощью математического преобразования (аналогичного математическим преобразованиям, описанным выше в связи с фиг. 5А и 5В), можно преобразовать систему согласно фиг. 9А в систему, по существу, математически эквивалентную ей и показанную на фиг. 9В.
На фиг. 9В показана система, имеющая контур 950 фазовой автоподстройки частоты, который, по существу, математически эквивалентен контуру 900 фазовой автоподстройки частоты, но который изменен таким образом, что контур 950 фазовой автоподстройки частоты, представляемый на фиг. 9В, имеет топологию, по существу, аналогичную контуру 550 фазовой автоподстройки частоты согласно фиг. 5А (отметим, что генератор 300 представлен в своей версии преобразованием Лапласа - Km/s), за исключением того, что контур 950 фазовой автоподстройки частоты показан имеющим опорный входной сигнал, который можно представить следующим выражением:
|
|
(11) |
Как можно заметить путем сравнения контура 950 фазовой автоподстройки частоты с системой 550 фазовой автоподстройки частоты, помимо различий во входных сигналах контура 950 фазовой автоподстройки частоты с контуром 550 фазовой автоподстройки частоты, контур 950 фазовой автоподстройки частоты и контур 550 фазовой автоподстройки частоты, по существу, топологически идентичны.
За счет того, что контур 950 фазовой автоподстройки частоты согласно фиг. 9В, появляющийся в результате вышеописанных математических преобразований, по существу, аналогичен контуру 550 фазовой автоподстройки частоты, автор создал ∑Δ- контуры фазовой автоподстройки частоты с дробным N, которые включают в себя вышеописанные способы и устройства. Теперь будет приведено описание этих ∑Δ- контуров фазовой автоподстройки частоты с дробным N.
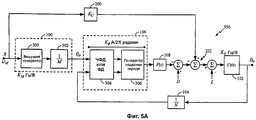
На фиг. 10А показана система, имеющая ∑Δ- контур 950 фазовой автоподстройки частоты с дробным N согласно фиг. 9В, но с дополнительным модулем 600 адаптации коэффициента передачи в прямом направлении, реализующим правило, касающееся системы, адаптируемой по вышеописанной исходной ошибке, и описанное в связи с фиг. 6В. Как отмечалось выше, это правило имеет следующий вид:
|
|
(12) |
Как отмечалось выше, фиг. 10А, по существу, аналогична фиг. 6А, за исключением того, что в отношении фиг. 10А справедливо уравнение
|
|
(13) |
где  переписано в виде
переписано в виде  , а
, а  переписано в виде
переписано в виде  из соображений простоты записи.
из соображений простоты записи.
За исключением вышеуказанного различия контур 950 фазовой автоподстройки частоты согласно фиг. 10А функционирует, по существу, аналогично контуру 550 фазовой автоподстройки частоты согласно фиг. 6А, и описание такого функционирования в явном виде будет опущено из соображений краткости.
На фиг. 10В изображена система согласно фиг. 10А, имеющая дополнительные компоненты в модуле 600 адаптации коэффициента передачи в прямом направлении. Как можно заметить путем сравнения, фиг. 10В, по существу, аналогична фиг. 6В, за исключением того, что в отношении фиг. 10В справедливо уравнение
|
|
(14) |
где RCH переписано в виде , а переписано в виде из соображений простоты записи.
За исключением вышеуказанного различия контур 950 фазовой автоподстройки частоты согласно фиг. 10В функционирует, по существу, аналогично контуру 550 фазовой автоподстройки частоты согласно фиг. 6В, и поэтому описание такого функционирования в явном виде будет опущено из соображений краткости.
На фиг. 11А показана система, имеющая ∑Δ-контур фазовой автоподстройки частоты с дробным N согласно фиг. 9В, но с дополнительными модулями 600 и 700, способствующими реализации правил, касающихся системы, адаптируемой по вышеописанной фильтрованной ошибке, и описанных в связи с фиг. 7А. Эти два правила имеют следующий вид:
|
|
(15) |
|
|
(16) |
Фиг. 11А, по существу, аналогична фиг. 7А, за исключением того, что в отношении фиг. 11А справедливо уравнение
|
|
(17) |
где RCH переписано в виде , а переписано в виде из соображений простоты записи.
За исключением вышеуказанного различия контур 950 фазовой автоподстройки частоты согласно фиг. 11А функционирует, по существу, аналогично контуру 550 фазовой автоподстройки частоты согласно фиг. 7А, и описание такого функционирования в явном виде будет опущено из соображений краткости.
На фиг. 11В проиллюстрирована система, несколько похожая на систему, изображенную на фиг. 11А, но без дополнительных компонентов в модулях 600 и 700. Как можно заметить путем сравнения, фиг. 11В, по существу, аналогична фиг. 7В, за исключением того, что в отношении фиг. 11В справедливо уравнение
|
|
(18) |
где RCH переписано в виде , а переписано в виде из соображений простоты записи.
За исключением вышеуказанного различия контур 950 фазовой автоподстройки частоты согласно фиг. 11В функционирует, по существу, аналогично контуру 550 фазовой автоподстройки частоты согласно фиг. 7В, и поэтому описание такого функционирования в явном виде будет опущено из соображений краткости.
Как описано выше в связи с фиг. 8А и 8В, проиллюстрированные различные практические реализации контуров и/или систем можно разделить между цифровыми и аналоговыми областями многими разными способами.
Вышеописанные варианты осуществления отображают различные компоненты, содержащиеся в различных других компонентах или соединенные с ними. Следует понять, что проиллюстрированные таким образом архитектуры являются лишь возможными и что на практике можно реализовать многие другие архитектуры, которые достигают тех же функциональных возможностей. В концептуальном смысле любая структура компонентов для достижения тех же самых функциональных возможностей является эффективно «связанной» тем образом, который и обеспечивает достижение желаемых функциональных возможностей. Следовательно, любые два компонента, объединяемые для достижения конкретных функциональных возможностей, можно рассматривать как «связанные» друг с другом тем образом, который и обеспечивает достижение желаемых функциональных возможностей, безотносительно архитектур и промежуточных компонентов. Точно так же любые два компонента, связанные таким образом, также можно рассматривать как «оперативно соединенные» друг с другом или «оперативно подключенные» друг к другу для достижения желаемых функциональных возможностей.
Хотя проиллюстрированы и описаны конкретные варианты осуществления настоящего изобретения, специалисты в данной области техники поймут на основании приведенных здесь положений, что в рамках этого изобретения при толковании его в самом широком смысле возможны изменения и модификации и что поэтому совокупность всех таких изменений и модификаций - как находящихся в рамках сущности и объема притязаний этого изобретения - охватывается прилагаемой формулой изобретения. Кроме того, специалистам в данной области техники будет понятно, что изобретение надлежащим образом охарактеризовано прилагаемой формулой изобретения. Для специалистов в данной области будет очевидно, что, вообще говоря, термины, употребляемые в заявке, особенно - в прилагаемой формуле изобретения (например, в формулировках прилагаемой формулы изобретения), как правило, предназначены для толкования в качестве «открытых» терминов (т.е. термин «включающий в себя» следует интерпретировать как «включающий в себя - но не в ограничительном смысле», термин «имеющий» следует интерпретировать как «имеющий, по меньшей мере», термин «включает в себя» следует интерпретировать как «включает в себя - но не в ограничительном смысле» и т.д.). Специалистам в данной области техники также будет понятно, что если имелось намерение указать конкретное число во вводной части пункта формулы изобретения, то такое намерение будет явно выражено, а при отсутствии такого указания не было и такого намерения. Например, чтобы помочь понять вышеизложенное, нижеследующая прилагаемая формула изобретения может предусматривать употребление вводных фраз «по меньшей мере, один» и «один или более» в качестве слов, являющихся вводными по отношению к формулировкам пунктов формулы изобретения. Вместе с тем, употребление таких фраз не должно рассматриваться так, будто предварение формулировки пункта формулы изобретения признаками единственного числа существительных при первом употреблении ограничивает какой-либо конкретный пункт формулы изобретения, содержащий изложение пункта формулы изобретения с таким предварением, изобретениями, предусматривающую только одну такую формулировку, даже когда тот же пункт включает в себя вводные фразы «один или более» и «по меньшей мере, один» и признаками единственного числа существительных при первом употреблении (например, признак единственного числа существительного при первом употреблении следует интерпретировать как «по меньшей мере, один» или «один или более»); тот же подход справедлив в отношении употребления признаков уже употреблявшихся существительных для предварения формулировок пунктов формулы изобретения. Кроме того, если во вводной части пункта формулы изобретения явно выражено конкретное число, то специалисты в данной области техники поймут, что такую формулировку в типичном случае нужно интерпретировать как означающую, по меньшей мере, указанное число (например, малейшее указание формулировок «два» без других модификаторов, как правило, означает формулировку «по меньшей мере, два» или формулировку «два или более»).
Claims (40)
1. Система связи, содержащая
ведущий генератор, имеющий выход, оперативно подключенный к первому входу фазового детектора,
ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора, и
модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора, причем модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора, содержит
усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, оперативно подключенный к выводу исходной ошибки фазового детектора, и
интегратор модуля адаптации коэффициента передачи в прямом направлении, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении и ведомым генератором.
ведущий генератор, имеющий выход, оперативно подключенный к первому входу фазового детектора,
ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора, и
модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора, причем модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора, содержит
усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, оперативно подключенный к выводу исходной ошибки фазового детектора, и
интегратор модуля адаптации коэффициента передачи в прямом направлении, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении и ведомым генератором.
2. Система связи по п.1, в которой усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, оперативно подключенный к выводу исходной ошибки фазового детектора, содержит блок умножения с опережением по фазе, имеющий первый вход, оперативно подключенный к выводу исходной ошибки фазового детектора, и второй вход, оперативно подключенный к входу ведущего генератора, и
при этом усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении имеет вход, оперативно соединенный с выходом блока умножения с опережением по фазе.
при этом усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении имеет вход, оперативно соединенный с выходом блока умножения с опережением по фазе.
3. Система связи по п.1, в которой интегратор модуля адаптации коэффициента передачи в прямом направлении, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении и ведомым генератором, содержит
вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, и
блок умножения с запаздыванием по фазе, имеющий первый вход, оперативно подключенный к выходу интегратора модуля адаптации коэффициента передачи в прямом направлении, второй вход, оперативно подключенный к входу ведущего генератора, и выход, оперативно подключенный к входу ведомого генератора.
вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, и
блок умножения с запаздыванием по фазе, имеющий первый вход, оперативно подключенный к выходу интегратора модуля адаптации коэффициента передачи в прямом направлении, второй вход, оперативно подключенный к входу ведущего генератора, и выход, оперативно подключенный к входу ведомого генератора.
4. Система связи по п.3, в которой интегратор модуля адаптации коэффициента передачи в прямом направлении, имеющий вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, содержит
усилитель с регулируемым коэффициентом усиления коэффициента утечки, имеющий вход, оперативно соединенный с выходом интегратора модуля адаптации коэффициента передачи в прямом направлении, и выход, оперативно соединенный с входом интегратора модуля адаптации коэффициента передачи в прямом направлении.
усилитель с регулируемым коэффициентом усиления коэффициента утечки, имеющий вход, оперативно соединенный с выходом интегратора модуля адаптации коэффициента передачи в прямом направлении, и выход, оперативно соединенный с входом интегратора модуля адаптации коэффициента передачи в прямом направлении.
5. Система связи по п.3, в которой блок умножения с запаздыванием по фазе, имеющий первый вход, оперативно подключенный к выходу интегратора модуля адаптации коэффициента передачи в прямом направлении, второй вход, оперативно подключенный к входу ведущего генератора, и выход, оперативно подключенный к входу ведомого генератора, содержит
усилитель с регулируемым коэффициентом усиления пропорционального вклада, имеющий вход, оперативно соединенный с выходом блока умножения с опережением по фазе, и выход, оперативно соединенный со вторым входом блока умножения с отставанием по фазе.
усилитель с регулируемым коэффициентом усиления пропорционального вклада, имеющий вход, оперативно соединенный с выходом блока умножения с опережением по фазе, и выход, оперативно соединенный со вторым входом блока умножения с отставанием по фазе.
6. Система связи по п.1, которая содержит карманный телефон или базовую станцию связи.
7. Система связи по п.1, в которой ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора, дополнительно содержит сигма-дельта модулятор, оперативно подключенный между выходом ведомого генератора и вторым входом фазового детектора.
8. Система связи по п.6, в которой сигма-дельта модулятор содержит, по меньшей мере, или генератор, управляемый напряжением, или/и суммирующее соединение.
9. Способ управления системой связи, заключающийся в том, что регулируют коэффициент передачи прямой связи контура фазовой автоподстройки частоты в ответ на сигнал исходной ошибки контура фазовой автоподстройки частоты и регулируют ведомый генератор контура фазовой автоподстройки частоты в ответ на коэффициент передачи прямой связи, при этом регулирование коэффициента передачи прямой связи контура фазовой автоподстройки частоты в ответ на сигнал исходной ошибки контура фазовой автоподстройки частоты заключается в том, что управляют скоростью изменения во времени коэффициента передачи прямой связи пропорционально динамике изменения сигнала исходной ошибки.
10. Способ по п.9, в котором управление скоростью изменения во времени коэффициента передачи прямой связи пропорционально динамике изменения сигнала исходной ошибки заключается в том, что
вычисляют произведение входного сигнала ведущего генератора контура фазовой автоподстройки частоты и сигнала исходной ошибки,
интегрируют это произведение, и
регулируют коэффициент передачи прямой связи в ответ на упомянутое интегрирование произведения.
вычисляют произведение входного сигнала ведущего генератора контура фазовой автоподстройки частоты и сигнала исходной ошибки,
интегрируют это произведение, и
регулируют коэффициент передачи прямой связи в ответ на упомянутое интегрирование произведения.
11. Способ по п.10, в котором упомянутое интегрирование произведения заключается в том, что умножают упомянутое произведение на коэффициент передачи модуля адаптации для получения масштабированного произведения модуля адаптации.
12. Способ по п.10, в котором упомянутое интегрирование произведения заключается в том, что
умножают упомянутое произведение на коэффициент передачи модуля адаптации для получения масштабированного произведения модуля адаптации,
суммируют масштабированное произведение модуля адаптации с масштабированным результатом интегрирования по обратной связи коэффициента утечки, и
интегрируют результат суммирования масштабированного произведения модуля адаптации с масштабированным результатом интегрирования по обратной связи коэффициента утечки.
умножают упомянутое произведение на коэффициент передачи модуля адаптации для получения масштабированного произведения модуля адаптации,
суммируют масштабированное произведение модуля адаптации с масштабированным результатом интегрирования по обратной связи коэффициента утечки, и
интегрируют результат суммирования масштабированного произведения модуля адаптации с масштабированным результатом интегрирования по обратной связи коэффициента утечки.
13. Способ по п.10, в котором регулирование коэффициента передачи прямой связи в ответ на упомянутое интегрирование произведения заключается в том, что
суммируют результат упомянутого интегрирования произведения с масштабированной по пропорциональному вкладу версией упомянутого произведения.
суммируют результат упомянутого интегрирования произведения с масштабированной по пропорциональному вкладу версией упомянутого произведения.
14. Способ по п.9, в котором регулирование ведомого генератора контура фазовой автоподстройки частоты в ответ на коэффициент передачи прямой связи заключается в том, что регулируют входной сигнал ведомого генератора контура фазовой автоподстройки частоты в ответ на произведение коэффициента передачи прямой связи и входного сигнала контура фазовой автоподстройки частоты.
15. Система связи, содержащая
ведущий генератор, имеющий выход, оперативно подключенный к первому входу фазового детектора,
ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора, и
модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, причем модуль адаптации коэффициента передачи в прямом направлении содержит
усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, и
интегратор модуля адаптации коэффициента передачи в прямом направлении, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении и ведомым генератором.
ведущий генератор, имеющий выход, оперативно подключенный к первому входу фазового детектора,
ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора, и
модуль адаптации коэффициента передачи в прямом направлении, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, причем модуль адаптации коэффициента передачи в прямом направлении содержит
усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, и
интегратор модуля адаптации коэффициента передачи в прямом направлении, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении и ведомым генератором.
16. Система связи по п.15, в которой усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, содержит
блок умножения с опережением по фазе, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, и второй вход, оперативно подключенный к входу ведущего генератора, и
при этом усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении имеет вход, оперативно соединенный с выходом блока умножения с опережением по фазе.
блок умножения с опережением по фазе, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, и второй вход, оперативно подключенный к входу ведущего генератора, и
при этом усилитель с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении имеет вход, оперативно соединенный с выходом блока умножения с опережением по фазе.
17. Система связи по п.15, в которой интегратор модуля адаптации коэффициента передачи в прямом направлении, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении и ведомым генератором, содержит
вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, и
блок умножения с запаздыванием по фазе, имеющий первый вход, оперативно подключенный к выходу интегратора модуля адаптации коэффициента передачи в прямом направлении, второй вход, оперативно подключенный к входу ведущего генератора, и выход, оперативно подключенный к входу ведомого генератора.
вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, и
блок умножения с запаздыванием по фазе, имеющий первый вход, оперативно подключенный к выходу интегратора модуля адаптации коэффициента передачи в прямом направлении, второй вход, оперативно подключенный к входу ведущего генератора, и выход, оперативно подключенный к входу ведомого генератора.
18. Система связи по п.17, в которой интегратор модуля адаптации коэффициента передачи в прямом направлении, имеющий вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля адаптации коэффициента передачи в прямом направлении, содержит
усилитель с регулируемым коэффициентом усиления коэффициента утечки, имеющий вход, оперативно соединенный с выходом интегратора модуля адаптации коэффициента передачи в прямом направлении, и выход, оперативно соединенный с входом интегратора модуля адаптации коэффициента передачи в прямом направлении.
усилитель с регулируемым коэффициентом усиления коэффициента утечки, имеющий вход, оперативно соединенный с выходом интегратора модуля адаптации коэффициента передачи в прямом направлении, и выход, оперативно соединенный с входом интегратора модуля адаптации коэффициента передачи в прямом направлении.
19. Система связи по п.17, в которой блок умножения с запаздыванием по фазе, имеющий первый вход, оперативно подключенный к выходу интегратора модуля адаптации коэффициента передачи в прямом направлении, второй вход, оперативно подключенный к входу ведущего генератора, и выход, оперативно подключенный к входу ведомого генератора, содержит
усилитель с регулируемым коэффициентом усиления пропорционального вклада, имеющий вход, оперативно соединенный с выходом блока умножения с опережением по фазе, и выход, оперативно соединенный со вторым входом блока умножения с отставанием по фазе.
усилитель с регулируемым коэффициентом усиления пропорционального вклада, имеющий вход, оперативно соединенный с выходом блока умножения с опережением по фазе, и выход, оперативно соединенный со вторым входом блока умножения с отставанием по фазе.
20. Система связи по п.15, дополнительно содержащая модуль подавления помех, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, и первый выход, оперативно подключенный к ведомому генератору.
21. Система связи по п.20, в которой модуль подавления помех, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, и первый выход, оперативно подключенный к ведомому генератору, содержит первое суммирующее соединение, имеющее первый вход, оперативно соединенный с первым выходом модуля подавления помех, и второй вход, оперативно соединенный с выводом фильтрованной ошибки, и
при этом ведомый генератор оперативно соединен с выходом первого суммирующего соединения.
при этом ведомый генератор оперативно соединен с выходом первого суммирующего соединения.
22. Система связи по п.21, в которой ведомый генератор, оперативно соединенный с выходом первого суммирующего соединения, содержит
второе суммирующее соединение, имеющее первый вход, оперативно соединенный с выходом первого суммирующего соединения, второй вход, оперативно соединенный с выходом модуля адаптации коэффициента передачи в прямом направлении, и выход, оперативно соединенный с ведомым генератором.
второе суммирующее соединение, имеющее первый вход, оперативно соединенный с выходом первого суммирующего соединения, второй вход, оперативно соединенный с выходом модуля адаптации коэффициента передачи в прямом направлении, и выход, оперативно соединенный с ведомым генератором.
23. Система связи по п.20, в которой модуль подавления помех, имеющий первый вход, оперативно подключенный к выводу фильтрованной ошибки фазового детектора, и первый выход, оперативно подключенный к ведомому генератору, содержит
усилитель с регулируемым коэффициентом усиления модуля подавления помех, оперативно соединенный с выводом фильтрованной ошибки фазового детектора, и интегратор модуля подавления помех, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля подавления помех и ведомым генератором.
усилитель с регулируемым коэффициентом усиления модуля подавления помех, оперативно соединенный с выводом фильтрованной ошибки фазового детектора, и интегратор модуля подавления помех, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля подавления помех и ведомым генератором.
24. Система связи по п.23, в которой интегратор модуля подавления помех, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля подавления помех и ведомым генератором, содержит
вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля подавления помех.
вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля подавления помех.
25. Система связи по п.24, в которой интегратор модуля подавления помех, имеющий вход, оперативно соединенный с выходом усилителя с регулируемым коэффициентом усиления модуля подавления помех, содержит
усилитель с регулируемым коэффициентом усиления коэффициента утечки модуля подавления помех, имеющий вход, оперативно соединенный с выходом интегратора модуля подавления помех, и выход, оперативно соединенный с входом интегратора модуля подавления помех.
усилитель с регулируемым коэффициентом усиления коэффициента утечки модуля подавления помех, имеющий вход, оперативно соединенный с выходом интегратора модуля подавления помех, и выход, оперативно соединенный с входом интегратора модуля подавления помех.
26. Система связи по п.23, в которой интегратор модуля подавления помех, оперативно соединенный с усилителем с регулируемым коэффициентом усиления модуля подавления помех и ведомым генератором, содержит
усилитель с регулируемым коэффициентом усиления пропорционального вклада модуля подавления помех, имеющий вход, оперативно соединенный с выводом фильтрованной ошибки фазового детектора, и выход, оперативно соединенный с ведомым генератором.
усилитель с регулируемым коэффициентом усиления пропорционального вклада модуля подавления помех, имеющий вход, оперативно соединенный с выводом фильтрованной ошибки фазового детектора, и выход, оперативно соединенный с ведомым генератором.
27. Система связи по п.15, которая содержит карманный телефон или базовую станцию связи.
28. Система связи по п.15, в которой ведомый генератор, имеющий выход, оперативно подключенный ко второму входу фазового детектора, дополнительно содержит сигма-дельта модулятор, оперативно подключенный между выходом ведомого генератора и вторым входом фазового детектора.
29. Система связи по п.28, в которой сигма-дельта модулятор содержит, по меньшей мере, или генератор, управляемый напряжением, или/и суммирующее соединение.
30. Способ управления системой связи, заключающийся в том, что
регулируют коэффициент передачи прямой связи контура фазовой автоподстройки частоты в ответ на сигнал фильтрованной ошибки контура фазовой автоподстройки частоты,
формируют сигнал фильтрованной ошибки, в котором подавлены помехи, и
регулируют ведомый генератор контура фазовой автоподстройки частоты в ответ на коэффициент передачи прямой связи и сигнал фильтрованной ошибки, в котором подавлены помехи.
регулируют коэффициент передачи прямой связи контура фазовой автоподстройки частоты в ответ на сигнал фильтрованной ошибки контура фазовой автоподстройки частоты,
формируют сигнал фильтрованной ошибки, в котором подавлены помехи, и
регулируют ведомый генератор контура фазовой автоподстройки частоты в ответ на коэффициент передачи прямой связи и сигнал фильтрованной ошибки, в котором подавлены помехи.
31. Способ по п.30, в котором регулирование коэффициента передачи прямой связи контура фазовой автоподстройки частоты в ответ на сигнал фильтрованной ошибки контура фазовой автоподстройки частоты заключается в том, что
управляют скоростью изменения во времени коэффициента передачи прямой связи пропорционально динамике изменения сигнала фильтрованной ошибки.
управляют скоростью изменения во времени коэффициента передачи прямой связи пропорционально динамике изменения сигнала фильтрованной ошибки.
32. Способ по п.31, в котором управление скоростью изменения во времени коэффициента передачи прямой связи пропорционально динамике изменения сигнала фильтрованной ошибки заключается в том, что
вычисляют произведение входного сигнала ведущего генератора контура фазовой автоподстройки частоты и сигнала фильтрованной ошибки,
интегрируют это произведение, и
регулируют коэффициент передачи прямой связи в ответ на упомянутое интегрирование произведения.
вычисляют произведение входного сигнала ведущего генератора контура фазовой автоподстройки частоты и сигнала фильтрованной ошибки,
интегрируют это произведение, и
регулируют коэффициент передачи прямой связи в ответ на упомянутое интегрирование произведения.
33. Способ по п.32, в котором упомянутое интегрирование произведения заключается в том, что
умножают упомянутое произведение на коэффициент передачи модуля адаптации коэффициента передачи в прямом направлении для получения масштабированного произведения модуля адаптации коэффициента передачи в прямом направлении.
умножают упомянутое произведение на коэффициент передачи модуля адаптации коэффициента передачи в прямом направлении для получения масштабированного произведения модуля адаптации коэффициента передачи в прямом направлении.
34. Способ по п.32, в котором упомянутое интегрирование произведения заключается в том, что
умножают упомянутое произведение на коэффициент передачи модуля адаптации коэффициента передачи в прямом направлении для получения масштабированного произведения модуля адаптации коэффициента передачи в прямом направлении,
суммируют масштабированное произведение модуля адаптации коэффициента передачи в прямом направлении с масштабированным результатом интегрирования по обратной связи коэффициента утечки и интегрируют результат суммирования масштабированного произведения модуля адаптации коэффициента передачи в прямом направлении с масштабированным результатом интегрирования по обратной связи коэффициента утечки.
умножают упомянутое произведение на коэффициент передачи модуля адаптации коэффициента передачи в прямом направлении для получения масштабированного произведения модуля адаптации коэффициента передачи в прямом направлении,
суммируют масштабированное произведение модуля адаптации коэффициента передачи в прямом направлении с масштабированным результатом интегрирования по обратной связи коэффициента утечки и интегрируют результат суммирования масштабированного произведения модуля адаптации коэффициента передачи в прямом направлении с масштабированным результатом интегрирования по обратной связи коэффициента утечки.
35. Способ по п.32, в котором регулирование коэффициента передачи прямой связи в ответ на упомянутое интегрирование произведения заключается в том, что
суммируют результат упомянутого интегрирования произведения с масштабированной по пропорциональному вкладу версией упомянутого произведения.
суммируют результат упомянутого интегрирования произведения с масштабированной по пропорциональному вкладу версией упомянутого произведения.
36. Способ по п.30, в котором формирование сигнала фильтрованной ошибки, в котором подавлены помехи, заключается в том, что
интегрируют сигнал фильтрованной ошибки, и
суммируют сигнал фильтрованной ошибки с результатом упомянутого интегрирования.
интегрируют сигнал фильтрованной ошибки, и
суммируют сигнал фильтрованной ошибки с результатом упомянутого интегрирования.
37. Способ по п.36, в котором интегрирование сигнала фильтрованной ошибки заключается в том, что
умножают сигнал фильтрованной ошибки на коэффициент передачи модуля подавления помех для получения масштабированного сигнала фильтрованной ошибки модуля подавления помех.
умножают сигнал фильтрованной ошибки на коэффициент передачи модуля подавления помех для получения масштабированного сигнала фильтрованной ошибки модуля подавления помех.
38. Способ по п.36, в котором интегрирование сигнала фильтрованной ошибки заключается в том, что
умножают сигнал фильтрованной ошибки на коэффициент передачи модуля подавления помех для получения масштабированного сигнала фильтрованной ошибки модуля подавления помех,
суммируют масштабированный сигнал фильтрованной ошибки модуля подавления помех с масштабированным результатом интегрирования по обратной связи коэффициента утечки модуля подавления помех, и
интегрируют результат суммирования масштабированного сигнала фильтрованной ошибки модуля подавления помех с масштабированным результатом интегрирования по обратной связи коэффициента утечки модуля подавления помех.
умножают сигнал фильтрованной ошибки на коэффициент передачи модуля подавления помех для получения масштабированного сигнала фильтрованной ошибки модуля подавления помех,
суммируют масштабированный сигнал фильтрованной ошибки модуля подавления помех с масштабированным результатом интегрирования по обратной связи коэффициента утечки модуля подавления помех, и
интегрируют результат суммирования масштабированного сигнала фильтрованной ошибки модуля подавления помех с масштабированным результатом интегрирования по обратной связи коэффициента утечки модуля подавления помех.
39. Способ по п.30, в котором формирование сигнала фильтрованной ошибки, в котором подавлены помехи, заключается в том, что
интегрируют сигнал фильтрованной ошибки, и
суммируют результат интегрирования сигнала фильтрованной ошибки с масштабированной по пропорциональному вкладу версией сигнала фильтрованной ошибки, и
суммируют сигнал фильтрованной ошибки с результатом суммирования результата интегрирования сигнала фильтрованной ошибки с масштабированной по пропорциональному вкладу версией сигнала фильтрованной ошибки.
интегрируют сигнал фильтрованной ошибки, и
суммируют результат интегрирования сигнала фильтрованной ошибки с масштабированной по пропорциональному вкладу версией сигнала фильтрованной ошибки, и
суммируют сигнал фильтрованной ошибки с результатом суммирования результата интегрирования сигнала фильтрованной ошибки с масштабированной по пропорциональному вкладу версией сигнала фильтрованной ошибки.
40. Способ по п.30, в котором регулирование ведомого генератора контура фазовой автоподстройки частоты в ответ на коэффициент передачи прямой связи и сигнал фильтрованной ошибки, в котором подавлены помехи, заключается в том, что
регулируют входной сигнал ведомого генератора контура фазовой автоподстройки частоты в ответ на суммирование произведения коэффициента передачи прямой связи и входного сигнала контура фазовой автоподстройки частоты с сигналом фильтрованной ошибки, в котором подавлены помехи.
регулируют входной сигнал ведомого генератора контура фазовой автоподстройки частоты в ответ на суммирование произведения коэффициента передачи прямой связи и входного сигнала контура фазовой автоподстройки частоты с сигналом фильтрованной ошибки, в котором подавлены помехи.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US40643502P | 2002-08-28 | 2002-08-28 | |
| US60/406,435 | 2002-08-28 | ||
| US10/442,340 US6909331B2 (en) | 2002-08-28 | 2003-05-20 | Phase locked loop having a forward gain adaptation module |
| US10/442,340 | 2003-05-20 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2009120024/09A Division RU2009120024A (ru) | 2002-08-28 | 2009-05-26 | Способ фазовой автоподстройки частоты и устройство для его осуществления |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2005108614A RU2005108614A (ru) | 2005-10-10 |
| RU2363096C2 true RU2363096C2 (ru) | 2009-07-27 |
Family
ID=31981399
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2005108614/09A RU2363096C2 (ru) | 2002-08-28 | 2003-08-28 | Способ фазовой автоподстройки частоты и устройство для его осуществления |
| RU2009120024/09A RU2009120024A (ru) | 2002-08-28 | 2009-05-26 | Способ фазовой автоподстройки частоты и устройство для его осуществления |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2009120024/09A RU2009120024A (ru) | 2002-08-28 | 2009-05-26 | Способ фазовой автоподстройки частоты и устройство для его осуществления |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US6909331B2 (ru) |
| EP (2) | EP2244375A3 (ru) |
| JP (5) | JP2005537722A (ru) |
| AT (1) | ATE460767T1 (ru) |
| AU (1) | AU2003268243A1 (ru) |
| CA (1) | CA2496526C (ru) |
| DE (1) | DE60331657D1 (ru) |
| RU (2) | RU2363096C2 (ru) |
| WO (1) | WO2004021559A1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2553104C1 (ru) * | 2013-08-15 | 2015-06-10 | Нуктех Кампани Лимитед | Схемы для генерации сигнала качающейся частоты |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100519482B1 (ko) * | 2002-11-30 | 2005-10-07 | 인티그런트 테크놀로지즈(주) | 전압 제어 발진기의 주파수 이득 변화가 보상된 위상 고정루프 주파수 합성기 |
| KR100547831B1 (ko) * | 2003-06-18 | 2006-01-31 | 삼성전자주식회사 | 가변 데이터 전송률에 대응이 가능한 클럭 및 데이터 복원장치 |
| US7015738B1 (en) * | 2003-06-18 | 2006-03-21 | Weixun Cao | Direct modulation of a voltage-controlled oscillator (VCO) with adaptive gain control |
| TWI242929B (en) * | 2004-12-01 | 2005-11-01 | Ind Tech Res Inst | Clock and data recovery apparatus and method thereof |
| US7643602B2 (en) * | 2005-09-30 | 2010-01-05 | Freescale Semiconductor, Inc. | Method and system for estimating frequency offsets |
| FR2900290B1 (fr) * | 2006-04-19 | 2008-11-21 | Atmel Corp | Procede et systeme pour fournir une pompe de charge pour les applications basse tension |
| US7728690B2 (en) * | 2007-10-19 | 2010-06-01 | Qualcomm, Incorporated | Method and apparatus for compensating for tuning nonlinearity of an oscillator |
| EP2220761B1 (en) * | 2007-11-02 | 2011-03-23 | ST-Ericsson SA | Pll calibration |
| US8045669B2 (en) * | 2007-11-29 | 2011-10-25 | Qualcomm Incorporated | Digital phase-locked loop operating based on fractional input and output phases |
| US7868672B2 (en) * | 2008-12-09 | 2011-01-11 | Qualcomm Incorporated | Digital phase-locked loop with two-point modulation and adaptive delay matching |
| WO2010081188A1 (en) * | 2009-01-13 | 2010-07-22 | Locata Corporation Pty Ltd | Method and apparatus for extending the range for tracking errors in phase lock loops |
| US8098103B2 (en) * | 2009-06-12 | 2012-01-17 | Qualcomm Incorporated | PLL disturbance cancellation |
| EP2432128A1 (en) * | 2010-09-17 | 2012-03-21 | Nokia Siemens Networks Oy | Method and system for clock recovery with adaptive loop gain control |
| US8634512B2 (en) * | 2011-02-08 | 2014-01-21 | Qualcomm Incorporated | Two point modulation digital phase locked loop |
| WO2012142760A1 (en) * | 2011-04-21 | 2012-10-26 | Huawei Technologies Co., Ltd. | Phase error compensation arrangement and phase error compensation method |
| US20140106681A1 (en) * | 2012-10-12 | 2014-04-17 | Qualcomm Incorporated | Ku ADAPTATION FOR PHASE-LOCKED LOOP WITH TWO-POINT MODULATION |
| US8901974B2 (en) * | 2013-01-30 | 2014-12-02 | Texas Instruments Deutschland Gmbh | Phase locked loop and method for operating the same |
| JP2015104053A (ja) * | 2013-11-27 | 2015-06-04 | 株式会社日立国際電気 | 無線機及び基地局 |
| RU2566813C1 (ru) * | 2014-10-10 | 2015-10-27 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Московский авиационный институт (национальный исследовательский университет) (МАИ) | Квазикогерентный демодулятор сигналов бинарной фазовой манипуляции |
| RU2582331C1 (ru) * | 2014-10-10 | 2016-04-27 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Московский авиационный институт (национальный исследовательский университет) (МАИ) | Квазикогерентный демодулятор сигналов квадратурной фазовой манипуляции |
| RU2567002C1 (ru) * | 2014-10-10 | 2015-10-27 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Московский авиационный институт (национальный исследовательский университет) (МАИ) | Квазикогерентный модулятор сигналов бинарной фазовой манипуляции |
| RU2581646C1 (ru) * | 2014-10-10 | 2016-04-20 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования Московский авиационный институт (национальный исследовательский университет) (МАИ) | Квазикогерентный модулятор сигналов квадратурной фазовой манипуляции |
| RU2580068C1 (ru) * | 2015-02-24 | 2016-04-10 | Акционерное общество "Научно-производственное предприятие "Исток" имени А.И. Шокина" (АО "НПП "Исток" им. Шокина") | Свч синтезатор частот |
| RU184877U1 (ru) * | 2018-07-04 | 2018-11-13 | Акционерное общество "Концерн "Созвездие" | Быстродействующий синтезатор частот с высокой чистотой спектра |
| TWI719811B (zh) | 2020-01-21 | 2021-02-21 | 瑞昱半導體股份有限公司 | 負回授系統架構及其迴圈濾波器 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5207491A (en) * | 1991-01-31 | 1993-05-04 | Motorola Inc. | Fast-switching frequency synthesizer |
| US5483203A (en) * | 1994-11-01 | 1996-01-09 | Motorola, Inc. | Frequency synthesizer having modulation deviation correction via presteering stimulus |
| WO1999043080A1 (en) * | 1998-02-23 | 1999-08-26 | Tropian, Inc. | Direct digital synthesis of precise, stable angle modulated rf signal |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2914814A1 (de) * | 1979-04-11 | 1980-10-30 | Siemens Ag | Frequenzmodulator |
| JPS61156310U (ru) * | 1985-03-20 | 1986-09-27 | ||
| JPS6316703A (ja) * | 1986-07-09 | 1988-01-23 | Fujitsu Ltd | 位相同期形多重周波数変調装置 |
| JPS6372204A (ja) * | 1986-09-12 | 1988-04-01 | Matsushita Electric Ind Co Ltd | 電圧制御発振器の変調感度補正回路 |
| JPS6424632A (en) * | 1987-07-21 | 1989-01-26 | Fujitsu Ltd | Phase locked loop circuit |
| JPH01106507A (ja) * | 1987-10-19 | 1989-04-24 | Kenwood Corp | 周波数変調回路 |
| JPH0236215U (ru) * | 1988-09-02 | 1990-03-08 | ||
| US4866404A (en) * | 1988-09-15 | 1989-09-12 | General Electric Company | Phase locked frequency synthesizer with single input wideband modulation system |
| US5027087A (en) * | 1990-02-02 | 1991-06-25 | Motorola, Inc. | Fast-switching frequency synthesizer |
| JPH05167441A (ja) * | 1991-12-17 | 1993-07-02 | Casio Comput Co Ltd | Pll発振回路 |
| JPH05327491A (ja) * | 1992-05-20 | 1993-12-10 | Fujitsu Ltd | 周波数シンセサイザ |
| JPH06216949A (ja) * | 1993-01-21 | 1994-08-05 | Matsushita Electric Ind Co Ltd | 送信装置 |
| JPH07176957A (ja) * | 1993-12-21 | 1995-07-14 | Nec Corp | 変調回路 |
| US5515013A (en) * | 1995-04-18 | 1996-05-07 | Sierra Wireless | Fixed compromise equalization for a dual port FM modulator |
| JPH0974315A (ja) * | 1995-09-04 | 1997-03-18 | Toyo Commun Equip Co Ltd | 変調回路 |
| JPH09130434A (ja) * | 1995-11-01 | 1997-05-16 | Tec Corp | 周波数シンセサイザの変調回路 |
| US6008703A (en) * | 1997-01-31 | 1999-12-28 | Massachusetts Institute Of Technology | Digital compensation for wideband modulation of a phase locked loop frequency synthesizer |
| US5983077A (en) * | 1997-07-31 | 1999-11-09 | Ericsson Inc. | Systems and methods for automatic deviation setting and control in radio transmitters |
| US5986512A (en) * | 1997-12-12 | 1999-11-16 | Telefonaktiebolaget L M Ericsson (Publ) | Σ-Δ modulator-controlled phase-locked-loop circuit |
| DE69826835T2 (de) | 1998-05-29 | 2006-02-23 | Motorola Semiconducteurs S.A. | Frequenzsynthetisierer |
| JP3571920B2 (ja) * | 1998-06-19 | 2004-09-29 | 株式会社東芝 | Fm変調回路 |
| US6625197B1 (en) * | 1998-10-27 | 2003-09-23 | Qualcomm Incorporated | Method and apparatus for multipath demodulation in a code division multiple access communication system |
| CA2281522C (en) * | 1999-09-10 | 2004-12-07 | Philsar Electronics Inc. | Delta-sigma based two-point angle modulation scheme |
| JP2002151960A (ja) * | 2000-11-10 | 2002-05-24 | Kenwood Corp | Pll回路 |
| US6552618B2 (en) * | 2000-12-13 | 2003-04-22 | Agere Systems Inc. | VCO gain self-calibration for low voltage phase lock-loop applications |
| US7522011B2 (en) * | 2005-08-15 | 2009-04-21 | Nokia Corporation | High pass modulation of a phase locked loop |
| US7760042B2 (en) * | 2008-06-26 | 2010-07-20 | Infineon Technologies Ag | Phase locked loop based frequency modulator with accurate oscillator gain adjustment |
-
2003
- 2003-05-20 US US10/442,340 patent/US6909331B2/en not_active Expired - Lifetime
- 2003-08-28 CA CA2496526A patent/CA2496526C/en not_active Expired - Fee Related
- 2003-08-28 AU AU2003268243A patent/AU2003268243A1/en not_active Abandoned
- 2003-08-28 EP EP10155392A patent/EP2244375A3/en not_active Withdrawn
- 2003-08-28 DE DE60331657T patent/DE60331657D1/de not_active Expired - Lifetime
- 2003-08-28 WO PCT/US2003/027022 patent/WO2004021559A1/en not_active Ceased
- 2003-08-28 JP JP2004531875A patent/JP2005537722A/ja not_active Withdrawn
- 2003-08-28 RU RU2005108614/09A patent/RU2363096C2/ru not_active IP Right Cessation
- 2003-08-28 EP EP03749195A patent/EP1532729B1/en not_active Expired - Lifetime
- 2003-08-28 AT AT03749195T patent/ATE460767T1/de not_active IP Right Cessation
-
2009
- 2009-05-26 RU RU2009120024/09A patent/RU2009120024A/ru not_active Application Discontinuation
-
2011
- 2011-09-20 JP JP2011204881A patent/JP5653871B2/ja not_active Expired - Lifetime
-
2013
- 2013-10-02 JP JP2013207754A patent/JP5852074B2/ja not_active Expired - Lifetime
-
2014
- 2014-09-11 JP JP2014184876A patent/JP5893696B2/ja not_active Expired - Lifetime
-
2016
- 2016-01-04 JP JP2016000226A patent/JP6254198B2/ja not_active Expired - Lifetime
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5207491A (en) * | 1991-01-31 | 1993-05-04 | Motorola Inc. | Fast-switching frequency synthesizer |
| US5483203A (en) * | 1994-11-01 | 1996-01-09 | Motorola, Inc. | Frequency synthesizer having modulation deviation correction via presteering stimulus |
| WO1999043080A1 (en) * | 1998-02-23 | 1999-08-26 | Tropian, Inc. | Direct digital synthesis of precise, stable angle modulated rf signal |
Non-Patent Citations (1)
| Title |
|---|
| ШАХГИЛЬДЯН В.В. и др. Системы фазовой автоподстройки частоты. - М.: Связь, 1972, с.308-310. * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2553104C1 (ru) * | 2013-08-15 | 2015-06-10 | Нуктех Кампани Лимитед | Схемы для генерации сигнала качающейся частоты |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2004021559A9 (en) | 2004-04-29 |
| JP2015039179A (ja) | 2015-02-26 |
| JP5852074B2 (ja) | 2016-02-03 |
| JP2012050099A (ja) | 2012-03-08 |
| JP2016105606A (ja) | 2016-06-09 |
| EP1532729A2 (en) | 2005-05-25 |
| CA2496526C (en) | 2013-08-06 |
| EP2244375A2 (en) | 2010-10-27 |
| JP5893696B2 (ja) | 2016-03-23 |
| AU2003268243A1 (en) | 2004-03-19 |
| JP6254198B2 (ja) | 2017-12-27 |
| EP1532729B1 (en) | 2010-03-10 |
| DE60331657D1 (de) | 2010-04-22 |
| JP5653871B2 (ja) | 2015-01-14 |
| HK1077935A1 (en) | 2006-02-24 |
| JP2014053912A (ja) | 2014-03-20 |
| US20040041636A1 (en) | 2004-03-04 |
| RU2009120024A (ru) | 2010-12-10 |
| ATE460767T1 (de) | 2010-03-15 |
| WO2004021559A1 (en) | 2004-03-11 |
| RU2005108614A (ru) | 2005-10-10 |
| EP2244375A3 (en) | 2010-11-03 |
| CA2496526A1 (en) | 2004-03-11 |
| US6909331B2 (en) | 2005-06-21 |
| JP2005537722A (ja) | 2005-12-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2363096C2 (ru) | Способ фазовой автоподстройки частоты и устройство для его осуществления | |
| US20060197611A1 (en) | Phase-locked loop circuits with current mode loop filters | |
| WO2003061117A1 (en) | Class d electroacoustic amplifier and method for compensation of power supply voltage influence on output audio signal in class d electroacoustic amplifier | |
| US7639757B2 (en) | Pulse modulator and pulse modulation method | |
| EP1419580B1 (en) | Phase-locked loop with analog phase rotator | |
| JP2011234104A (ja) | スペクトラム拡散クロック生成回路及びその制御方法 | |
| HK1077935B (en) | Phase locked loop method and apparatus | |
| US20060055469A1 (en) | Variable frequency synthesizer comprising a sigma-delta modulator | |
| US12379408B2 (en) | Device and methods for phase noise measurement | |
| CN118399954B (zh) | 带宽调整电路、方法、装置、产品、介质及锁相环电路 | |
| GB2197733A (en) | Low harmonic distortion oscillator | |
| CN100559310C (zh) | 调节控制回路的加权电路 | |
| KR20050065602A (ko) | 데이터 변환기 | |
| Magerramov et al. | A Simplified Mathematical Model of a VCO for Implementing an Analog to Digital Converter Based on a PLL in 0.25-um CMOS Technology | |
| JP4815572B2 (ja) | 補償された高速pll回路 | |
| JP3647851B2 (ja) | アナログ/デジタル変換回路 | |
| JPH0540503A (ja) | 適応制御装置とそれを用いた適応的データ処理装置 | |
| JP2005159667A (ja) | 音響信号コンプレッサ | |
| JP2001313544A (ja) | 位相発生器 | |
| Tunik | Simulation of following self-tuning filters with VisSim system | |
| Man et al. | # Chaotic Control of PLL for Aerospace and Land Communications | |
| EP0465559A1 (en) | Frequency synthesizer with fm modulation | |
| Naimark et al. | H controller design for pure delay and other distributed systems | |
| JPS62190958A (ja) | 自動周波数制御回路 | |
| JPH041801A (ja) | ゲイン調整装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20190829 |