WO2010005251A2 - 복수 객체 추적 방법과 장치 및 저장매체 - Google Patents
복수 객체 추적 방법과 장치 및 저장매체 Download PDFInfo
- Publication number
- WO2010005251A2 WO2010005251A2 PCT/KR2009/003771 KR2009003771W WO2010005251A2 WO 2010005251 A2 WO2010005251 A2 WO 2010005251A2 KR 2009003771 W KR2009003771 W KR 2009003771W WO 2010005251 A2 WO2010005251 A2 WO 2010005251A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- objects
- tracking
- input image
- subset
- recognition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/40—Analysis of texture
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
- G06T7/251—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments involving models
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
Definitions
- the present invention relates to a multiple object tracking method, apparatus and storage medium. More specifically, regardless of the number (N) of objects to be tracked, only one subset of object recognition processing is performed for each camera image, and as a result, one subset of object recognition per input image is performed.
- the present invention relates to a multiple object tracking method, an apparatus, and a storage medium capable of performing multiple object tracking in real time by performing all object tracking.
- Augmented Reality is an area of Virtual Reality, a technique that synthesizes virtual objects in a real environment and looks like objects in the original environment.
- Augmented reality has a feature that, unlike the existing virtual reality that targets only virtual space and objects, it can reinforce and provide additional information that is difficult to obtain only by real world by synthesizing virtual objects on the basis of real world.
- VR technology generally allows users to immerse themselves in the virtual environment, while the user cannot see the real environment, whereas in AR technology, the user can see the real environment, and the real environment and the virtual objects are mixed. Takes shape.
- virtual reality is shown to the user by replacing the real world, but augmented reality has the distinction of supplementing the real world to show the user by superimposing virtual objects in the real world. It has the feature of providing. Due to this feature, unlike existing virtual reality, which can be applied only to fields such as games, it can be applied to various real environments, and it is particularly popular as a next generation display technology suitable for ubiquitous environment.
- FIG. 1 is a flowchart of a multi-object tracking method using a conventional single object recognition.
- the camera image undergoes N object recognition processes. That is, after recognizing object 1 with respect to the input image at time t and recognizing object 2 repeatedly, object list N (objects 1 to N) and postures are derived. Next, the process of recognizing the input image at the time t + 1 from the object 1 to the object N is repeated to derive the list (objects 1 to N) and the posture of the objects recognized at the time t + 1. This process is repeated as needed. Therefore, according to this method, the overall performance is reduced to 1 / N as compared with the case of recognizing one object per input image.
- This real object tracking algorithm is optimized when there is only a single object in the camera image.
- it is determined whether a single object to be recognized from the input image exists, and if present, a three-dimensional posture including a three-axis position and a three-axis orientation of the object is estimated.
- the algorithm is suitable for application to a single object in this manner.
- the algorithm is used for tracking a plurality of objects, the presence or absence of all objects to be tracked for each input image must be determined so that processing speed decreases in proportion to the number of objects.
- the present invention has been made to solve the above problems, and in particular, not only a single object but also simultaneously track a plurality of objects while the performance of the overall tracking is not deteriorated, and each object is moved and changed dynamically using a plurality of objects. It is an object of the present invention to provide a multi-object tracking method and apparatus and a storage medium to enable augmented reality applications that can give.
- the multi-object tracking method according to the present invention is characterized in that object detection is performed only for one subset of objects for each input image.
- the performance of the overall tracking is not deteriorated, and the augmented reality application capable of dynamically changing and moving each object using a plurality of objects is enabled.
- the augmented reality application capable of dynamically changing and moving each object using a plurality of objects is enabled.
- FIG. 1 is a flowchart of a multiple object tracking method using a conventional single object recognition
- FIG. 2 is a flowchart of an object tracking method according to a preferred embodiment of the present invention.
- 4 and 5 are conceptual views showing an example in which the objects A, B, and C are independent objects, and each movement is simultaneously tracked;
- FIG. 6 illustrates an example of a key frame used for tracking a plurality of 3D objects
- 7 is a photograph showing tracking of multiple 3D objects.
- a method of tracking a plurality of objects comprising: (a) performing object recognition only on an object of a subset of a plurality of objects with respect to an input image at a specific time; And (b) tracking all objects between images from the image of the previous viewpoint of the specific viewpoint with respect to all objects in the input image while step (a) is performed.
- the step (a) may comprise a key frame forming step of constructing a key frame set for storing the appearance of the object only for one subset of a plurality of objects with respect to the input image; Extracting a key point from the key frame and measuring a 3D (Dimension) position of the extracted key point; And a posture measuring step of measuring a posture of the object of the subset by matching the extracted feature point and the extracted key point with respect to the input image.
- a key frame forming step of constructing a key frame set for storing the appearance of the object only for one subset of a plurality of objects with respect to the input image Extracting a key point from the key frame and measuring a 3D (Dimension) position of the extracted key point;
- a posture measuring step of measuring a posture of the object of the subset by matching the extracted feature point and the extracted key point with respect to the input image.
- all the objects between images may be tracked by extracting feature points from the object of the input image and matching the feature points extracted from the image of the previous view.
- An apparatus for tracking a plurality of objects may include: a recognizer configured to perform object recognition on an object of a subset of a plurality of objects with respect to an input image at a specific time; And a tracking unit which tracks all objects between images from the image of the previous viewpoint of the specific view for all the objects in the input image while the object recognition unit is performing the object recognition.
- the recognizer and the tracker may be operated in separate threads to be executed in parallel on a multi-core CPU.
- the tracking unit extracts feature points from the object of the input image and matches all feature points extracted from the image of the previous view to track all objects between images.
- the recognition unit may further include: a key frame forming unit constituting a key frame set that stores the appearance of the object only for one subset of a plurality of objects with respect to the input image; A key point extracting unit extracting a key point from the key frame and measuring a 3D position of the extracted key point; And a posture measurer configured to measure a posture of an object of the subset by matching the extracted feature point and the extracted key point with respect to the input image.
- Object recognition techniques make the tracking application more robust, but with the constraint that it can be processed in real time.
- the present invention enables object recognition in real time by distributing time for recognizing a plurality of objects in consecutive frames. Unrecognized objects among the objects present in the current frame are recognized in any one of subsequent frames. There may be a slight delay in this process, but in practice the user is hardly aware of it. Accordingly, the user may recognize that the object recognition is performed in real time.
- the temporary key point is a feature point detected on an object surface and performs inter-frame matching with the temporary key point for successive frames. According to this method, an object whose tracking has been initialized (started) can accurately calculate the pose of the object even when the object is not recognized, and takes less time than object recognition.
- object recognition may be performed during interframe tracking, and object recognition may be performed even if interframe tracking is already performed.
- the track can be prevented from being lost by rapid movement or occlusion.
- Recognition and tracing are separate and can be performed on different cores of parallel processors, respectively.
- FIG. 2 is a flowchart of an object tracking method according to a preferred embodiment of the present invention.
- only one subnet object recognition process is performed for each camera image regardless of the number N of objects to be tracked.
- Perform object recognition of the subnet That is, when tracking N objects, an object of one subnet is recognized for a total of N video inputs, and time division object recognition is performed. During the time interval in which each object is recognized, all object tracking between images is performed, which tracks the movement of the recognized object.
- the object recognition is performed only for the object belonging to the set 1 of the plurality of objects with respect to the input image at the time point t, and the previous time point (t-1, t for all objects including the object belonging to the set 1).
- the object belonging to the set 1 is recognized and the postures of all the objects at the time point t are calculated.
- the object recognition is performed only on the object belonging to the set 2 of the plurality of objects with respect to the input image of the time point t + 1, and the previous time (t, t-1, .. By tracking all objects between images with respect to the image of.), The objects belonging to the set 2 are recognized and the postures of all the objects at the time point t + 1 are calculated.
- This process is repeated up to the input image of time t + N + 1 to recognize objects belonging to the set N and to track all objects between images.
- the object belonging to the set 1 is recognized, and in the Nth image, the object belonging to the set N is recognized.
- the N + 1th image is repeated by recognizing the object belonging to the set 1 again.
- each object is recognized only once per 1 / N frame, and while it is not recognized, posture tracking is continuously performed by object tracking between images.
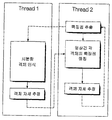
- Object recognition and tracking between images can be performed in parallel on multiple core CPUs by running in separate threads. That is, in FIG. 3, object recognition is performed in Thread 1, and object tracking between images is performed in Thread 2.
- time division object recognition is performed by matching a key point extracted from an input image in Thread 2 with a key frame subset, and object pose estimation is performed using the same.
- Thread 2 extracts key points from the input image, performs matching with the previous frame, and then estimates the object posture by matching feature points of each object between the images.
- Thread 1 when implemented as a multi-object tracking device for performing a multi-object tracking method according to an embodiment of the present invention, Thread 1 recognizes an object only for a subset of objects of a plurality of objects with respect to an input image at a specific point in time. It is implemented to include a recognition unit to perform.
- the recognition unit is a key frame forming unit constituting a set of key frames for storing the appearance of the object only for the object of a subset of the plurality of objects with respect to the input image, extracts the key point from the key frame and the 3D of the extracted key point
- a key point extractor for measuring a position and a posture measurer for matching a feature point extracted from an input image and a key point of a key frame and measuring an object's posture.
- Thread 2 is implemented by including a tracking unit that tracks all objects between images from the previous viewpoint image of a specific time point for all objects in the input image while object recognition is performed in the recognition unit. All objects between images are tracked by extracting and matching feature points extracted from an image of a previous viewpoint.
- such a tracker uses temporary keypoints by using a separate feature point belonging to an area of an object recognized in an image among feature points not used for object recognition for an object recognized by the object recognizer at a specific point in time. Create Also, for the object that is not recognized but tracked, the object position in the input image is estimated by using the temporary key point of the object generated at the previous time point, and then a temporary key point is generated.
- pose estimation is performed by merging them together with feature points extracted from the input image. Perform posture estimation to track all objects between images.
- the tracking unit determines whether the object recognized by the recognition unit has already been track-initialized previously, and if not initialized, performs a track initialization. Pose estimation is performed by merging with a temporary key point. In addition, the tracking unit estimates a posture in the input image by using only the temporary key points generated in the previous viewpoint image for the object that is not recognized by the recognition unit but has already been initialized at the previous viewpoint. As such, the tracking unit tracks a plurality of objects existing in the image while the recognition unit included in thread # 1 recognizes one subset of objects with respect to the input image.
- the method for tracking a plurality of objects according to the present invention may occur when the posture is estimated by performing the detection to track the target object whenever the object to be tracked exists in the current frame and performing only the recognition. This has the effect of eliminating jittering.
- the object model includes geometrical information and the appearance of the target object.
- Geometric information is a 3D model that is stored in the form of a list of triangles, and there are a number of softwares that can obtain such a 3D model from an image.
- the exterior part consists of a set of key frames.
- a set of key frames stores the shape of the object from different points of view and can cover most of the object. In general, three to four key frames are sufficient to cover an object in all directions.
- the 3D position of the key point can be easily measured by extracting a feature point called a key point in each key frame and back-projecting the extracted key point onto the 3D model. Key points and 3D positions are stored for use in the recognition process.
- object recognition and object tracking between images will be described in more detail.
- each subset is as follows.
- ⁇ j is the key frame
- f is the number of key frames that can be handled at the frame rate
- N is the total number of key frames.
- Each input frame matches a key frame of any one of the subsets S i .
- the subsets are considered iteratively one by one, starting again at S 1 at the end of the N / f frame.
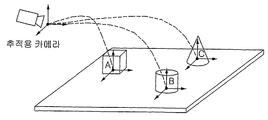
- 4 and 5 are conceptual views illustrating an example in which objects A, B, and C are independent objects, and movements of each degree of freedom (6DOF) are simultaneously tracked.
- FIG. 6 is a diagram illustrating an example of a key frame used for tracking a plurality of 3D objects.
- the total set of key frames includes nine key frames.
- One subset contains one of the key frames and constitutes nine subsets.
- One subset matches the camera frame.
- one subset can contain several key frames.
- 7 is a photograph showing tracking of multiple 3D objects.
- FIG. 7 all three objects are present in the image and tracked simultaneously.
- the pose of the object is accurately calculated even when the object is moved by hand or there is partial occlusion between the objects.
- Objects continue to be recognized during tracking.
- the 3D model is projected with the calculated 3D pose and is shown as a line.
- the present invention can be embodied as computer readable codes on a computer readable recording medium.
- the computer-readable recording medium includes all kinds of recording devices in which data that can be read by a computer system is stored.
- Examples of computer-readable recording media include ROM, RAM, CD-ROM, magnetic tape, floppy disks, optical data storage devices, and the like, which may be implemented in the form of a carrier wave (for example, transmission over the Internet). Include.
- the computer readable recording medium can also be distributed over network coupled computer systems so that the computer readable code is stored and executed in a distributed fashion.
- functional programs, codes, and code segments for implementing the present invention can be easily inferred by programmers in the art to which the present invention belongs.
- the present invention can be widely applied to the field of information devices, multimedia signal processing, signal and image processing, including augmented reality, including mobile.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
Abstract
본 발명은 복수 객체 추적 방법과 장치 및 저장매체에 관한 것이다. 보다 상세하게는 추적하고자 하는 객체의 개수(N)에 관계없이 각 카메라 영상당 한 서브셋의 객체 인식 처리만 수행하여 결과적으로 입력 영상당 한 서브셋의 객체 인식을 수행하고, 객체 인식이 수행되는 동안 영상 간 모든 객체 추적을 수행함으로써 복수 객체추적을 실시간으로 할 수 있는 복수 객체 추적 방법과 장치 및 저장매체에 관한 것이다. 이를 위하여 본 발명은 복수의 객체를 추적하는 방법에 있어서, (a) 특정 시점에서의 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 객체 인식을 수행하는 단계; 및 (b) 상기 (a)단계가 수행되는 동안 상기 입력 영상 내의 모든 객체들에 대해서 상기 특정 시점의 이전 시점의 영상으로부터 영상 간 모든 객체를 추적하는 단계를 포함하는 것을 특징으로 하는 복수 객체 추적 방법을 제공한다.
Description
본 발명은 복수 객체 추적 방법과 장치 및 저장매체에 관한 것이다. 보다 상세하게는 추적하고자 하는 객체의 개수(N)에 관계없이 각 카메라 영상당 한 서브셋의 객체 인식 처리만 수행하여 결과적으로 입력 영상당 한 서브셋의 객체 인식을 수행하고, 객체 인식이 수행되는 동안 영상 간 모든 객체 추적을 수행함으로써 복수 객체추적을 실시간으로 할 수 있는 복수 객체 추적 방법과 장치 및 저장매체에 관한 것이다.
증강현실(Augmented Reality)은 가상현실(Virtual Reality)의 한 분야로, 실제 환경에 가상 사물을 합성하여 원래의 환경에 존재하는 사물처럼 보이도록 하는 기법이다.
증강현실은 가상의 공간과 사물만을 대상으로 하는 기존의 가상현실과 달리, 현실세계의 기반위에 가상의 사물을 합성하여 현실세계 만으로는 얻기 어려운 부가적인 정보들을 보강해 제공할 수 있는 특징을 가지고 있다. 즉, 가상현실기술은 일반적으로 사용자로 하여금 가상의 환경에 몰입하게 하므로 사용자는 실제 환경을 볼 수 없는 반면, 증강현실기술에서는 사용자가 실제 환경을 볼 수 있으며, 실제 환경과 가상의 객체가 혼합된 형태를 띤다. 다시 말하면, 가상현실은 현실세계를 대체하여 사용자에게 보여주지만 증강현실은 현실세계에 가상의 물체를 중첩함으로서 현실세계를 보충하여 사용자에게 보여준다는 차별성을 가지며, 가상현실에 비해 사용자에게 보다 나은 현실감을 제공한다는 특징이 있다. 이러한 특징 때문에 단순히 게임과 같은 분야에만 한정된 적용이 가능한 기존 가상현실과 달리 다양한 현실환경에 응용이 가능하며 특히, 유비쿼터스 환경에 적합한 차세대 디스플레이 기술로 각광받고 있다.
가상의 사물을 증강하기 위한 실제 환경으로는 종래부터 사각형 마커가 많이 사용되었다. 이는 검정색 테두리 안에 특정 패턴의 마커를 인식 및 추적하도록 한 것으로, 다수의 마커 인식이 가능하다는 장점이 있다. 그러나, 마커의 일부가 가려지면 추적이 힘들고, 흑백의 강한 대비에 의해 마커가 시선을 집중시킴으로써 사용자의 시해를 저해하며, 사용자의 몰입감을 저하시킨다는 단점이 있다.
이러한 사각형 마커의 단점을 극복하기 위해 실제 객체를 이용하는 방법이 등장하였다. 이는 사각형 마커 대신, 실제 물체의 그림 또는 무늬와 같은 자체적 텍스쳐(texture)를 인식과 추적에 이용하는 것으로, 실제 객체의 자연스러운 특징(natural feature)을 이용하므로 객체의 일부가 가려지더라도 추적에 강하고 사용자에게 몰입감을 제공한다.
도 1은 종래의 단일 객체 인식을 이용한 다수 객체 추적 방법의 흐름도이다.
도 1을 참조하면, N개의 객체를 인식하고 추적하기 위해서 카메라 영상은 N개의 객체 인식 처리를 거치게 된다. 즉, 시점 t에서의 입력 영상에 대하여 객체 1을 인식한 후 객체 2를 인식하는 과정을 반복하여 객체 N까지 인식하면 시점 t에서 인식된 객체의 목록(객체 1~N)과 자세가 도출된다. 다음으로, 시점 t+1에서의 입력 영상에 대하여 객체 1부터 객체 N까지 인식하는 과정을 되풀이하여 시점 t+1에서 인식된 객체의 목록(객체 1~N)과 자세가 도출된다. 필요로 하는 시점만큼 이러한 과정을 반복하게 된다. 따라서, 이러한 방법에 의하면 입력 영상당 1개의 객체를 인식하는 경우에 비하여 전체적인 성능이 1/N으로 저하된다.
이러한 실제 객체 추적 알고리즘은 카메라의 영상에 단일 객체만이 존재하는 경우로 최적화되어 있다. 상기 알고리즘에 의하면 입력 영상으로부터 인식하고자 하는 단일 객체의 존재 여부를 판단한 후, 존재하는 경우 그 객체의 3축 위치, 3축 방위를 포함하는 3차원 자세를 추정한다. 상기 알고리즘은 이러한 과정을 거치는 관계로 단일 객체에 적용하기 적합하다. 상기 알고리즘이 다수 객체의 추적에 사용되면 입력 영상마다 추적하고자 하는 모든 객체에 대하여 존재 여부를 판단하여야 하므로 객체의 수에 비례하여 처리 속도가 감소하므로, 실시간으로 운용하기 어렵다는 문제점이 있다.
본 발명은 상기와 같은 문제점을 해결하기 위해 안출된 것으로, 특히 단일 객체뿐만 아니라 다수의 객체를 동시에 추적하면서도 전체적인 추적의 성능이 저하되지 않고, 다수의 객체를 이용하여 각 객체를 움직이며 동적으로 변화를 줄 수 있는 증강 현실 응용이 가능하도록 하는 복수 객체 추적 방법과 장치 및 저장매체를 제공하는 데 그 목적이 있다.
상기 목적을 달성하기 위해 안출된 본 발명에 따른 복수 객체 추적 방법은 각 입력 영상당 한 서브셋의 객체에 대해서만 객체 인식(object detection)을 수행하는 것을 특징으로 한다.
본 발명에 의하면 단일 객체뿐만 아니라 다수의 객체를 동시에 추적하면서도 전체적인 추적의 성능이 저하되지 않고, 다수의 객체를 이용하여 각 객체를 움직이며 동적으로 변화를 줄 수 있는 증강 현실 응용이 가능하도록 하며, 영상 간의 객체 추적을 접목시켜 현재의 카메라 영상만으로 추정된 객체의 자세에 비해 안정성이 향상될 수 있도록 하는 효과가 있다.
도 1은 종래의 단일 객체 인식을 이용한 다수 객체 추적 방법의 흐름도,
도 2는 본 발명의 바람직한 실시예에 따른 객체 추적 방법의 흐름도,
도 3은 본 발명의 바람직한 실시예에 따른 각 과정의 세부 흐름도,
도 4와 도 5는 객체 A, B, C가 독립 객체이고, 각각의 움직임이 동시에 추적되는 예를 도시한 개념도,
도 6은 다수의 3D 객체 추적을 위해 사용되는 키 프레임의 예를 도시한 도면,
도 7은 다수의 3D 객체 추적을 보여주는 사진이다.
본 발명에 따른 복수 객체 추적 방법은 (a) 특정 시점에서의 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 객체 인식을 수행하는 단계; 및 (b) 상기 (a)단계가 수행되는 동안 상기 입력 영상 내의 모든 객체들에 대해서 상기 특정 시점의 이전 시점의 영상으로부터 영상 간 모든 객체를 추적하는 단계를 포함하는 것을 특징으로 한다.
여기서, 상기 (a) 단계는 상기 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 상기 객체의 외관을 저장하기 위한 키 프레임 집합을 구성하는 키 프레임 형성 단계; 상기 키 프레임으로부터 키 포인트를 추출하고 추출된 키 포인트의 3D(Dimension) 위치를 측정하는 키 포인트 추출 단계; 및 상기 입력 영상에 대해 추출된 특징점과 상기 추출된 키 포인트를 매칭하여 상기 한 서브셋의 객체에 대한 자세를 측정하는 자세 측정 단계;를 포함할 수 있다.
또한, 상기 (b)단계는 상기 입력 영상의 객체에서 특징점을 추출하고, 상기 이전 시점의 영상으로부터 추출된 특징점과 매칭시킴으로써 영상 간 모든 객체를 추적할 수 있다.
본 발명에 따른 복수 객체 추적 장치는 특정 시점에서의 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 객체 인식을 수행하는 인식부; 및 상기 객체 인식부에서 객체 인식이 수행되는 동안 상기 입력 영상 내의 모든 객체들에 대해서 상기 특정 시점의 이전 시점의 영상으로부터 영상 간 모든 객체를 추적하는 추적부를 포함하는 것을 특징으로 한다.
또한, 상기 인식부와 상기 추적부는 각기 독립된 쓰레드(thread)에서 동작되어 멀티 코어 CPU 상에서 병렬적으로 수행될 수 있다.
또한, 상기 추적부는 상기 입력 영상의 객체에서 특징점을 추출하고, 상기 이전 시점의 영상으로부터 추출된 특징점과 매칭시킴으로써 영상 간 모든 객체를 추적할 수 있다.
또한, 상기 인식부는 상기 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 상기 객체의 외관을 저장하고 있는 키 프레임 집합을 구성하는 키 프레임 형성부; 상기 키 프레임으로부터 키 포인트를 추출하고 추출된 키 포인트의 3D(Dimension) 위치를 측정하는 키 포인트 추출부; 및 상기 입력 영상에 대해 추출된 특징점과 상기 추출된 키 포인트를 매칭하여 상기 한 서브셋의 객체에 대한 자세를 측정하는 자세 측정부;를 포함할 수 있다.
이하, 본 발명의 바람직한 실시예를 첨부된 도면들을 참조하여 상세히 설명한다. 우선 각 도면의 구성 요소들에 참조 부호를 부가함에 있어서, 동일한 구성 요소들에 대해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한, 본 발명을 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 발명의 요지를 흐릴 수 있다고 판단되는 경우에는 그 상세한 설명은 생략한다. 또한, 이하에서 본 발명의 바람직한 실시예를 설명할 것이나, 본 발명의 기술적 사상은 이에 한정하거나 제한되지 않고 당업자에 의해 변형되어 다양하게 실시될 수 있음은 물론이다.
객체 인식(object detection)은 객체의 수에 비례하여 처리 속도가 저하되지만, 영상 간에 다수 객체의 3차원 움직임을 추적하는 것은 상대적으로 성능 저하가 작다. 객체 인식 기법은 추적 애플리케이션을 보다 강건하게 하나, 실시간으로 처리될 수 있도록 해야 하는 제약이 따른다. 본 발명은 연속되는 프레임에서 다수의 객체를 인식하는 시간을 분배함으로써 실시간으로 객체 인식이 이루어질 수 있도록 한다. 현재 프레임에 존재하는 객체 중에서 인식되지 않은 객체들은 이후의 프레임 중 어느 하나에서 인식된다. 이러한 과정에서 약간의 지연이 발생할 수 있으나, 실제로 사용자는 이를 거의 인식하기 어렵다. 따라서, 사용자는 이러한 객체 인식이 실시간으로 이루어지는 것으로 파악하게 된다.
새로운 객체가 등장할 때 이러한 객체는 프레임간 추적(frame-by-frame tracking)을 초기화하는 시스템에 의해 즉시 인식된다. 새로운 객체가 인식된 후에는 프레임간 추적이 초기화(시작)된다. 이를 위해 "임시 키 포인트(temporal keypoints)"를 이용한다. 임시 키 포인트는 객체 표면에서 검출된 특징점으로, 연속되는 프레임들에 대하여 상기 임시 키 포인트와 프레임간 매칭(matching)을 수행한다. 이러한 방법에 의하면 추적이 초기화(시작)된 객체는 객체가 인식되지 않을 때에도 객체의 자세(pose)를 정확하게 산출할 수 있고, 객체 인식에 비해 시간이 덜 소요된다.
이와 같이 프레임간 추적이 이루어지는 동안 객체 인식이 수행되며, 프레임간 추적이 이미 수행되고 있는 경우에도 객체 인식이 수행될 수 있다. 이러한 방법에 의하면 빠른 움직임 또는 가림(occlusion)에 의해 트랙이 소실되는 것을 방지할 수 있다. 인식과 추적은 구분되며 각각 병렬 프로세서의 서로 다른 코어에서 수행될 수 있다.
도 2는 본 발명의 바람직한 실시예에 따른 객체 추적 방법의 흐름도이다.
본 발명의 바람직한 실시예에 따른 객체 추적 방법은, 도 2를 참조하면, 추적하고자 하는 객체의 개수(N)에 관계없이 각 카메라 영상당 한 서브넷의 객체 인식 처리만 수행하여 결과적으로 입력 영상당 한 서브넷의 객체 인식을 수행한다. 즉, N개의 객체를 추적하고자 할 경우 총 N회의 영상 입력마다 한 서브넷의 객체가 인식되어 시분할 객체 인식이 이루어진다. 각 객체가 인식되는 시간 간격 동안은 영상 간 모든 객체 추적이 수행되며, 이는 인식된 객체의 움직임을 추적하는 것이다.
보다 상세하게는, 시점 t에서의 입력 영상에 대하여 다수의 객체 중 집합 1에 속하는 객체에 대해서만 객체 인식을 수행하고, 집합 1에 속하는 객체를 포함한 모든 객체들에 대해서 이전 시점(t-1, t-2,...)의 영상에 대하여 영상 간 모든 객체를 추적함으로써, 집합 1에 속하는 객체를 인식함과 동시에 시점 t에서의 모든 객체의 자세를 산출한다.
또한, 시점 t+1의 입력 영상에 대하여 다수의 객체 중 집합 2에 속하는 객체에 대해서만 객체 인식을 수행하고, 집합 2에 속하는 객체를 포함한 모든 객체에 대해서 이전 시점(t, t-1,...)의 영상에 대하여 영상 간 모든 객체를 추적함으로써, 집합 2에 속하는 객체를 인식함과 동시에 시점 t+1에서의 모든 객체의 자세를 산출한다.
이러한 과정을 시점 t+N+1의 입력 영상까지 반복하여 집합 N에 속하는 객체를 인식하고 영상 간 모든 객체를 추적한다.
즉, 1번째 영상에서는 집합 1에 속하는 객체의 인식을 수행하고, N번째 영상에서는 집합 N에 속하는 객체의 인식을 수행한다. N+1번째 영상에서는 다시 집합 1에 속하는 객체를 인식하는 방법으로 반복된다. 결과적으로 각 객체가 1/N 프레임당 한 번씩만 인식되므로, 인식되지 않는 동안에는 영상 간 객체 추적에 의해 지속적으로 자세 추적이 이루어진다.
도 3은 본 발명의 바람직한 실시예에 따른 각 과정의 세부 흐름도이다.
객체 인식과 영상 간 추적은 각기 독립된 쓰레드(thread)에서 동작시켜 멀티 코어 CPU 상에서 병렬적으로 수행될 수 있다. 즉, 도 3에서 Thread 1에서는 객체 인식을 수행하고 Thread 2에서는 영상 간 객체 추적을 수행한다.
Thread 1에서는 Thread 2에서 입력 영상으로부터 추출한 키 포인트를 키 프레임 부분집합과 매칭함으로써 시분할 객체 인식을 수행하고, 이를 이용하여 객체 자세 추정(pose estimation)을 수행한다.
Thread 2에서는 입력 영상으로부터 키 포인트를 추출하고 이전 프레임과 매칭을 수행하여 영상 간 각 객체의 특징점을 매칭함으로써 객체 자세 추정을 수행한다.
도시되지 않았으나, 본 발명의 일 실시예에 따른 복수 객체 추적 방법을 수행하는 복수 객체 추적 장치로 구현할 경우, Thread 1은 특정 시점에서의 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 객체 인식을 수행하는 인식부를 포함하여 구현된다. 여기서, 인식부는 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 객체의 외관을 저장하기 위한 키 프레임 집합을 구성하는 키 프레임 형성부, 키 프레임으로부터 키 포인트를 추출하고 추출된 키 포인트의 3D 위치를 측정하는 키 포인트 추출부, 입력 영상에서 추출된 특징점과 키 프레임의 키 포인트를 매칭하고 객체의 자세를 측정하는 자세 측정부를 포함한다.
또한, Thread 2는 인식부에서 객체 인식이 수행되는 동안 입력 영상 내의 모든 객체들에 대해서 특정 시점의 이전 시점 영상으로부터 영상 간 모든 객체를 추적하는 추적부를 포함하여 구현되며, 입력 영상의 객체에서 특징점을 추출하고, 이전 시점의 영상으로부터 추출된 특징점과 매칭시킴으로써 영상 간 모든 객체를 추적한다.
보다 구체적으로, 이와 같은 추적부는 특정 시점에 객체 인식부에서 인식된 객체에 대해 객체 인식에 사용되지 않은 특징점 중 영상에서 인식된 객체의 영역에 속하는 별도의 특징점을 이용하여 임시 키 포인트(temporal keypoints)를 생성한다. 또한, 인식되지 않았으나 추적되고 있는 객체에 대해서는 이전 시점에서 생성된 해당 객체의 임시 키 포인트을 이용하여 입력 영상에서의 객체 자세를 추정한 다음 임시 키 포인트을 생성한다.
이와 같은 임시 키 포인트들이 이전 시점 영상으로부터 추출된 경우 입력 영상에서 추출된 특징점과 함께 병합하여 자세 추정(Pose estimation)을 수행하고, 이전 시점 영상에서 검출되지 아니한 경우 입력 영상의 특징점과 병합 없이 독자적으로 자세 추정을 수행함으로써 영상 간 모든 객체를 추적한다.
그리고, 아울러 추적부는 인식부에서 인식된 객체가 이전에 이미 추적 초기화가 되었는지 여부를 판단하고, 초기화 되지 않은 경우에는 추적 초기화(Track initialization)를 수행하며, 이미 초기화 된 경우에는 이전 시점 영상으로부터 생성된 임시 키 포인트와 병합하여 자세 추정(Pose estimation)을 수행한다. 또한, 추적부는 인식부에서 인식되지 않았으나 이전 시점에 이미 추적 초기화가 된 객체에 대해서는 이전 시점 영상에서 생성된 임시 키 포인트만을 이용하여 입력 영상에서의 자세를 추정한다. 이와 같이 추적부는 thread#1에 포함되는 인식부가 입력 영상에 대해 하나의 서브셋(subset)의 객체를 인식하는 동안에, 영상 내에 존재하는 다수의 객체를 추적하는 것이다.
이와 같이 본 발명에 따른 복수 객체 추적 방법은 추적의 대상이 되는 객체가 현재 프레임에 존재할 때마다 대상 객체를 추적하기 위한 인식(Detection)을 수행하고, 인식만 수행하여 자세를 추정한 경우 발생할 수 있는 지터링(Jittering) 효과를 제거시키는 효과가 있다.
객체 모델은 기하학적 정보(geometrical information)와 목표 객체의 외관(appearance)을 포함한다. 기하학적 정보는 삼각형들의 리스트 형태로 저장되는 3D 모델로, 영상으로부터 이러한 3D 모델을 얻을 수 있는 소프트웨어가 다수 존재한다.
외관 부분은 키 프레임 집합으로 구성된다. 키 프레임 집합은 여러 시점으로부터의 객체 형상을 저장하고 있어 객체의 대부분을 커버할 수 있다. 일반적으로 3~4개의 키 프레임이면 모든 방향에 대해 객체를 커버하기에 충분하다. 각 키 프레임에서 키 포인트라고 불리는 특징점을 추출하고, 추출된 키 포인트를 3D 모델 상에 백-프로젝팅(back-projecting)함으로써 키 포인트의 3D 위치를 용이하게 측정할 수 있다. 키 포인트와 3D 위치는 인식 과정에서 사용하기 위해 저장된다. 이하에서는 객체 인식과 영상 간 객체 추적에 대하여 보다 상세하게 설명한다.
모든 키 프레임을 부분집합(subset)으로 나누고, 부분집합을 각 카메라 영상과 매치시킨다. 예컨대, 각 부분집합은 다음과 같다.
수학식 1 
κj는 키 프레임, f는 프레임 속도에서 다루어질 수 있는 키 프레임 수, N은 키 프레임의 총 수를 나타낸다.
각 입력 프레임은 부분집합 Si중 어느 하나의 키 프레임과 매칭된다. 부분집합은 하나씩 반복적으로 고려되며, N/f 프레임이 끝나면 다시 S1부터 시작한다.
도 4와 도 5는 객체 A, B, C가 독립 객체이고, 각각의 움직임(6DOF;Degrees Of Freedom)이 동시에 추적되는 예를 도시한 개념도이다.
도 6은 다수의 3D 객체 추적을 위해 사용되는 키 프레임의 예를 도시한 도면이다.
실시예에서 총 키 프레임 집합은 9개의 키 프레임을 포함한다. 하나의 부분집합은 키 프레임 중 하나를 포함하고 있으며, 9개의 부분집합을 구성한다. 하나의 부분집합은 카메라 프레임과 매치된다. 인식 성능에 따라 하나의 부분집합이 여러 개의 키 프레임을 포함할 수 있다.
도 7은 다수의 3D 객체 추적을 보여주는 사진이다.
도 7에서 모든 3개의 객체는 영상 내에 존재하고 동시에 추적된다. 객체의 자세는 손으로 객체를 이동시키거나 객체 사이에 부분적인 폐색(occlusion)이 있을 경우에도 정확하게 산출된다. 추적하는 동안 객체들은 계속하여 인식된다. 모든 프레임에 대하여 3D 모델은 산출된 3D 자세가 투사되며, 선으로 도시되어 있다.
한편, 본 발명은 컴퓨터로 읽을 수 있는 기록 매체에 컴퓨터가 읽을 수 있는 코드로 구현하는 것이 가능하다. 컴퓨터가 읽을 수 있는 기록 매체는 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록 장치를 포함한다.
컴퓨터가 읽을 수 있는 기록 매체의 예로는 ROM, RAM, CD-ROM, 자기 테이프, 플로피디스크, 광데이터 저장장치 등이 있으며, 또한 캐리어 웨이브(예를 들어 인터넷을 통한 전송)의 형태로 구현하는 것을 포함한다. 또한, 컴퓨터가 읽을 수 있는 기록 매체는 네트워크로 연결된 컴퓨터 시스템에 분산되어, 분산 방식으로 컴퓨터가 읽을 수 있는 코드가 저장되고 실행될 수 있다. 그리고, 본 발명을 구현하기 위한 기능적인(fun ction al) 프로그램, 코드 및 코드 세그먼트들은 본 발명이 속하는 기술 분야의 프로그래머들에 의하여 용이하게 추론될 수 있다.
이상의 설명은 본 발명의 기술 사상을 예시적으로 설명한 것에 불과한 것으로서, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 본 발명의 본질적인 특성에서 벗어나지 않는 범위 내에서 다양한 수정, 변경 및 치환이 가능할 것이다. 따라서, 본 발명에 개시된 실시예 및 첨부된 도면들은 본 발명의 기술 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 이러한 실시예 및 첨부된 도면에 의하여 본 발명의 기술 사상의 범위가 한정되는 것은 아니다. 본 발명의 보호 범위는 아래의 청구범위에 의하여 해석되어야 하며, 그와 동등한 범위 내에 있는 모든 기술 사상은 본 발명의 권리범위에 포함되는 것으로 해석되어야 할 것이다.
본 발명은 모바일을 비롯하여 증강현실이 지원되는 정보기기, 멀티미디어 신호처리, 신호 및 영상 처리 분야에 널리 적용될 수 있다.
Claims (9)
- 복수의 객체를 추적하는 방법에 있어서,각 입력 영상당 한 서브셋(subset)의 객체에 대해서만 객체 인식(object detection)을 수행하는 것을 특징으로 하는 복수 객체 추적 방법.
- 복수의 객체를 추적하는 방법에 있어서,(a) 특정 시점에서의 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 객체 인식을 수행하는 단계; 및(b) 상기 (a)단계가 수행되는 동안 상기 입력 영상 내의 모든 객체들에 대해서 상기 특정 시점의 이전 시점의 영상으로부터 영상 간 모든 객체를 추적하는 단계를 포함하는 것을 특징으로 하는 복수 객체 추적 방법.
- 제 2 항에 있어서, 상기 (b)단계는상기 입력 영상의 객체에서 특징점을 추출하고, 상기 이전 시점의 영상으로부터 추출된 특징점과 매칭시킴으로써 영상 간 모든 객체를 추적하는 것을 특징으로 하는 복수 객체 추적 방법.
- 제 2 항에 있어서, 상기 (a) 단계는상기 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 상기 객체의 외관을 저장하기 위한 키 프레임 집합을 구성하는 키 프레임 형성 단계;상기 키 프레임으로부터 키 포인트를 추출하고 추출된 키 포인트의 3D(Dimension) 위치를 측정하는 키 포인트 추출 단계; 및상기 입력 영상에 대해 추출된 특징점과 상기 추출된 키 포인트를 매칭하여 상기 한 서브셋의 객체에 대한 자세를 측정하는 자세 측정 단계;를 포함하는 것을 특징으로 하는 복수 객체 추적 방법.
- 복수의 객체를 추적하는 장치에 있어서,특정 시점에서의 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 객체 인식을 수행하는 인식부; 및상기 인식부에서 객체 인식이 수행되는 동안 상기 입력 영상 내의 모든 객체들에 대해서 상기 특정 시점의 이전 시점의 영상으로부터 영상 간 모든 객체를 추적하는 추적부;를 포함하는 것을 특징으로 하는 복수 객체 추적 장치.
- 제 5 항에 있어서,상기 인식부와 상기 추적부는 각각 독립된 쓰레드(thread)에서 동작되어 멀티 코어 CPU 상에서 인식과 추적이 병렬적으로 수행되는 것을 특징으로 하는 복수 객체 추적 장치.
- 제 6 항에 있어서, 상기 추적부는상기 입력 영상의 객체에서 특징점을 추출하고, 상기 이전 시점의 영상으로부터 추출된 특징점과 매칭시킴으로써 영상 간 모든 객체를 추적하는 것을 특징으로 하는 복수 객체 추적 장치.
- 제 5 항에 있어서,상기 인식부는상기 입력 영상에 대하여 복수의 객체 중 한 서브셋의 객체에 대해서만 상기 객체의 외관을 저장하고 있는 키 프레임 집합을 구성하는 키 프레임 형성부;상기 키 프레임으로부터 키 포인트를 추출하고 추출된 키 포인트의 3D(Dimension) 위치를 측정하는 키 포인트 추출부; 및상기 입력 영상에 대해 추출된 특징점과 상기 추출된 키 포인트를 매칭하여 상기 한 서브셋의 객체에 대한 자세를 측정하는 자세 측정부;를 포함하는 것을 특징으로 하는 복수 객체 추적 방법.
- 제1항 내지 제4항 중 어느 한 항에 따른 복수 객체 추적 방법이 프로그램으로 수록된 컴퓨터가 판독가능한 저장매체.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09794657.8A EP2299406B1 (en) | 2008-07-09 | 2009-07-09 | Multiple object tracking method, device and storage medium |
| US12/953,354 US8467576B2 (en) | 2008-07-09 | 2010-11-23 | Method and apparatus for tracking multiple objects and storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2008-0066519 | 2008-07-09 | ||
| KR1020080066519A KR100958379B1 (ko) | 2008-07-09 | 2008-07-09 | 복수 객체 추적 방법과 장치 및 저장매체 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US12/953,354 Continuation US8467576B2 (en) | 2008-07-09 | 2010-11-23 | Method and apparatus for tracking multiple objects and storage medium |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| WO2010005251A2 true WO2010005251A2 (ko) | 2010-01-14 |
| WO2010005251A9 WO2010005251A9 (ko) | 2010-03-04 |
| WO2010005251A3 WO2010005251A3 (ko) | 2010-04-22 |
Family
ID=41507587
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2009/003771 Ceased WO2010005251A2 (ko) | 2008-07-09 | 2009-07-09 | 복수 객체 추적 방법과 장치 및 저장매체 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8467576B2 (ko) |
| EP (1) | EP2299406B1 (ko) |
| KR (1) | KR100958379B1 (ko) |
| WO (1) | WO2010005251A2 (ko) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100119109A1 (en) * | 2008-11-11 | 2010-05-13 | Electronics And Telecommunications Research Institute Of Daejeon | Multi-core multi-thread based kanade-lucas-tomasi feature tracking method and apparatus |
| KR101129328B1 (ko) * | 2010-03-03 | 2012-03-26 | 광주과학기술원 | 타겟 추적 장치 및 방법 |
| KR101273634B1 (ko) * | 2011-02-08 | 2013-06-11 | 광주과학기술원 | 모바일 기기를 이용하는 증강현실 환경에서 복수 객체 추적방법 및 이를 이용한 시스템 |
| JP5178860B2 (ja) * | 2011-02-24 | 2013-04-10 | 任天堂株式会社 | 画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法 |
| JP5026604B2 (ja) | 2011-02-24 | 2012-09-12 | 任天堂株式会社 | 画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法 |
| JP4967065B2 (ja) | 2011-02-24 | 2012-07-04 | 任天堂株式会社 | 画像処理プログラム、画像処理装置、画像処理システム、および画像処理方法 |
| JP2011134343A (ja) | 2011-02-24 | 2011-07-07 | Nintendo Co Ltd | 画像処理プログラム、画像処理装置、画像処理システム、および画像処理方法 |
| JP4989768B2 (ja) | 2011-02-24 | 2012-08-01 | 任天堂株式会社 | 画像処理プログラム、画像処理装置、画像処理システム、および画像処理方法 |
| JP5016723B2 (ja) | 2011-02-24 | 2012-09-05 | 任天堂株式会社 | 画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法 |
| US9939888B2 (en) * | 2011-09-15 | 2018-04-10 | Microsoft Technology Licensing Llc | Correlating movement information received from different sources |
| US9606992B2 (en) * | 2011-09-30 | 2017-03-28 | Microsoft Technology Licensing, Llc | Personal audio/visual apparatus providing resource management |
| JP5821526B2 (ja) | 2011-10-27 | 2015-11-24 | ソニー株式会社 | 画像処理装置、画像処理方法及びプログラム |
| WO2013077562A1 (ko) * | 2011-11-24 | 2013-05-30 | 에스케이플래닛 주식회사 | 특징점 설정 장치 및 방법과 이를 이용한 객체 추적 장치 및 방법 |
| KR101371275B1 (ko) * | 2012-11-05 | 2014-03-26 | 재단법인대구경북과학기술원 | 스테레오 영상 기반 다중 객체 추적 방법 및 이의 프로그램을 기록한 기록매체 |
| JP5942861B2 (ja) * | 2013-01-11 | 2016-06-29 | オムロン株式会社 | 画像処理装置、画像処理方法、および画像処理プログラム |
| US9158988B2 (en) | 2013-06-12 | 2015-10-13 | Symbol Technclogies, LLC | Method for detecting a plurality of instances of an object |
| US9355123B2 (en) | 2013-07-19 | 2016-05-31 | Nant Holdings Ip, Llc | Fast recognition algorithm processing, systems and methods |
| TWI570666B (zh) * | 2013-11-15 | 2017-02-11 | 財團法人資訊工業策進會 | 電子裝置及其影片物體追蹤方法 |
| US9501498B2 (en) | 2014-02-14 | 2016-11-22 | Nant Holdings Ip, Llc | Object ingestion through canonical shapes, systems and methods |
| US9378556B2 (en) * | 2014-04-25 | 2016-06-28 | Xerox Corporation | Method for reducing false object detection in stop-and-go scenarios |
| KR102223308B1 (ko) * | 2014-05-29 | 2021-03-08 | 삼성전자 주식회사 | 영상처리 방법 및 이를 구현한 전자 장치 |
| US20160092727A1 (en) * | 2014-09-30 | 2016-03-31 | Alcatel-Lucent Usa Inc. | Tracking humans in video images |
| US9984315B2 (en) | 2015-05-05 | 2018-05-29 | Condurent Business Services, LLC | Online domain adaptation for multi-object tracking |
| US10380763B2 (en) * | 2016-11-16 | 2019-08-13 | Seiko Epson Corporation | Hybrid corner and edge-based tracking |
| US11080864B2 (en) * | 2018-01-08 | 2021-08-03 | Intel Corporation | Feature detection, sorting, and tracking in images using a circular buffer |
| US11128783B2 (en) * | 2018-03-07 | 2021-09-21 | Disney Enterprises, Inc. | Systems and methods for tracking objects in a field of view |
| CN109214379B (zh) * | 2018-10-23 | 2022-02-15 | 昆明微想智森科技股份有限公司 | 基于图像识别追踪技术的多功能点读指点件及点读方法 |
| US11475590B2 (en) | 2019-09-12 | 2022-10-18 | Nec Corporation | Keypoint based pose-tracking using entailment |
| US12051239B2 (en) | 2020-08-11 | 2024-07-30 | Disney Enterprises, Inc. | Item location tracking via image analysis and projection |
| US11741712B2 (en) * | 2020-09-28 | 2023-08-29 | Nec Corporation | Multi-hop transformer for spatio-temporal reasoning and localization |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6542621B1 (en) * | 1998-08-31 | 2003-04-01 | Texas Instruments Incorporated | Method of dealing with occlusion when tracking multiple objects and people in video sequences |
| KR20000054784A (ko) * | 2000-06-23 | 2000-09-05 | 이성환 | 시간적 색상에 기반한 외형 모델을 이용한 복수 객체의움직임 추적시스템 및 그 제어방법 |
| US7688349B2 (en) * | 2001-12-07 | 2010-03-30 | International Business Machines Corporation | Method of detecting and tracking groups of people |
| US8351647B2 (en) * | 2002-07-29 | 2013-01-08 | Videomining Corporation | Automatic detection and aggregation of demographics and behavior of people |
| JP4217876B2 (ja) * | 2002-12-20 | 2009-02-04 | 財団法人生産技術研究奨励会 | 画像における移動物体の追跡方法及び装置 |
| WO2004095374A1 (ja) * | 2003-04-21 | 2004-11-04 | Nec Corporation | 映像オブジェクト認識装置および認識方法、映像アノテーション付与装置および付与方法ならびにプログラム |
| US7171024B2 (en) * | 2003-12-01 | 2007-01-30 | Brickstream Corporation | Systems and methods for determining if objects are in a queue |
| US20060195858A1 (en) * | 2004-04-15 | 2006-08-31 | Yusuke Takahashi | Video object recognition device and recognition method, video annotation giving device and giving method, and program |
| JP4241763B2 (ja) * | 2006-05-29 | 2009-03-18 | 株式会社東芝 | 人物認識装置及びその方法 |
| KR20080017521A (ko) * | 2006-08-21 | 2008-02-27 | 문철홍 | 차 영상을 이용한 다중 물체 추적 방법 |
| KR20080073933A (ko) * | 2007-02-07 | 2008-08-12 | 삼성전자주식회사 | 객체 트래킹 방법 및 장치, 그리고 객체 포즈 정보 산출방법 및 장치 |
| US20090002489A1 (en) * | 2007-06-29 | 2009-01-01 | Fuji Xerox Co., Ltd. | Efficient tracking multiple objects through occlusion |
-
2008
- 2008-07-09 KR KR1020080066519A patent/KR100958379B1/ko not_active Expired - Fee Related
-
2009
- 2009-07-09 EP EP09794657.8A patent/EP2299406B1/en not_active Not-in-force
- 2009-07-09 WO PCT/KR2009/003771 patent/WO2010005251A2/ko not_active Ceased
-
2010
- 2010-11-23 US US12/953,354 patent/US8467576B2/en not_active Expired - Fee Related
Non-Patent Citations (2)
| Title |
|---|
| None |
| See also references of EP2299406A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2299406B1 (en) | 2018-03-28 |
| US20110081048A1 (en) | 2011-04-07 |
| WO2010005251A9 (ko) | 2010-03-04 |
| KR20100006324A (ko) | 2010-01-19 |
| EP2299406A4 (en) | 2012-10-31 |
| WO2010005251A3 (ko) | 2010-04-22 |
| US8467576B2 (en) | 2013-06-18 |
| EP2299406A2 (en) | 2011-03-23 |
| KR100958379B1 (ko) | 2010-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2010005251A2 (ko) | 복수 객체 추적 방법과 장치 및 저장매체 | |
| CN110555901B (zh) | 动静态场景的定位和建图方法、装置、设备和存储介质 | |
| Van den Bergh et al. | Combining RGB and ToF cameras for real-time 3D hand gesture interaction | |
| CN110807410B (zh) | 关键点定位方法、装置、电子设备和存储介质 | |
| CN109255749B (zh) | 自主和非自主平台中的地图构建优化 | |
| US20170070724A9 (en) | Camera pose estimation apparatus and method for augmented reality imaging | |
| US20040247176A1 (en) | Segmenting three-dimensional video images using stereo | |
| KR20110099998A (ko) | 상호작용형 실시간 증강현실 시스템과 그 방법, 및 상기 방법을 구현하는 프로그램이 기록된 기록매체 | |
| CN102141838A (zh) | 基于视觉的身份跟踪 | |
| CN114093024A (zh) | 人体动作的识别方法、装置、设备及存储介质 | |
| WO2011149159A1 (ko) | 증강현실을 위한 실시간 마커리스 3차원 객체추적 시스템 및 그 방법 | |
| CN110298867A (zh) | 一种视频目标跟踪方法 | |
| CN110215706B (zh) | 虚拟对象的位置确定方法、装置、终端及存储介质 | |
| CN113850750B (zh) | 一种目标轨迹校验的方法、装置、设备及存储介质 | |
| WO2011078596A2 (ko) | 상황에 따라 적응적으로 이미지 매칭을 수행하기 위한 방법, 시스템, 및 컴퓨터 판독 가능한 기록 매체 | |
| Bang et al. | Camera pose estimation using optical flow and ORB descriptor in SLAM-based mobile AR game | |
| CN121033900B (zh) | 多机位目标去重方法、装置、设备、存储介质及程序产品 | |
| US12602822B2 (en) | Method device and storage medium for back-end optimization of simultaneous localization and mapping | |
| KR20140030444A (ko) | 마커리스 증강현실 서비스 제공 장치 및 이를 위한 촬영 위치 추정 방법 | |
| Ohya et al. | Analyzing Video Sequences of Multiple Humans: Tracking, Posture Estimation, and Behavior Recognition | |
| Polat et al. | Tracking body parts of multiple people: a new approach | |
| WO2023127995A1 (ko) | 회전형 바운딩박스 기반 객체 검출 딥러닝 네트워크 | |
| CN113808158A (zh) | 视频中群体对象运动的分析方法、装置、设备及存储介质 | |
| CN120070687B (zh) | 一种动作捕捉系统及方法 | |
| CN120355751B (zh) | 一种vr大空间沉浸式游览的多人碰撞检测方法及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09794657 Country of ref document: EP Kind code of ref document: A2 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009794657 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |