WO2016084261A1 - 欠陥検査装置及び欠陥検査方法 - Google Patents
欠陥検査装置及び欠陥検査方法 Download PDFInfo
- Publication number
- WO2016084261A1 WO2016084261A1 PCT/JP2014/081653 JP2014081653W WO2016084261A1 WO 2016084261 A1 WO2016084261 A1 WO 2016084261A1 JP 2014081653 W JP2014081653 W JP 2014081653W WO 2016084261 A1 WO2016084261 A1 WO 2016084261A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- light
- inspected
- magnetic field
- surface shape
- spatial
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
- G01N27/82—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws
- G01N27/90—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws using eddy currents
- G01N27/9046—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws using eddy currents by analysing electrical signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/032—Measuring direction or magnitude of magnetic fields or magnetic flux using magneto-optic devices, e.g. Faraday or Cotton-Mouton effect
- G01R33/0325—Measuring direction or magnitude of magnetic fields or magnetic flux using magneto-optic devices, e.g. Faraday or Cotton-Mouton effect using the Kerr effect
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
- G01N27/82—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws
- G01N27/83—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws by investigating stray magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/2441—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures using interferometry
Definitions
- the present invention relates to a defect inspection apparatus and a defect inspection method for detecting a characteristic change (defect) such as a surface or internal flaw or a material change of an inspection object.
- a characteristic change such as a surface or internal flaw or a material change of an inspection object.
- a metal material which is an inspection object (inspected object) is irradiated with an energizing coil or a magnetic field by a permanent magnet to change characteristics such as flaws and material changes (hereinafter referred to as defects).
- the difference in the magnetic field distribution caused by the magnetic field is detected by a magnetic sensor to detect a defect.
- a DC magnetic field in which the magnetic field strength does not change with time or low-frequency excitation is generally used.
- the magnetic flux is leaked from the metal that is the object to be inspected in the vicinity of the flaw, and the magnetic flux is used to detect the magnetic flux, or the eddy current probe's exciting coil is supplied with current that fluctuates over time.
- An eddy current is generated by generating a magnetic flux whose current value fluctuates over time, generating an eddy current by bringing the eddy current probe close to the metal to be inspected, and obtaining a change signal of the eddy current as a detection signal by a magnetic sensor. And the like are known flaw detection method.
- the spatial distribution of the magnetic field is two-dimensionally obtained using the magneto-optic effect.
- a detection method for mapping as an image is introduced.
- Patent Document 1 Japanese Patent Application Laid-Open No. 2014-153318
- a magnetic thin film is installed as a magnetic transfer film on an inspection surface of an object to be inspected.
- a technique for acquiring and evaluating a magnetic field distribution that changes due to a defect by imaging a response light reflected by irradiating light with a camera is disclosed.
- the magneto-optical effect as used in the above prior art is a physical phenomenon in which, when a target magnetic material is irradiated with light, the polarization angle of the irradiated light rotates according to the magnetization state of the magnetic material. There is a Faraday effect for transmitted light and a Kerr effect for reflected light. In the magneto-optical effect, since the rotation amount of the polarization angle is sensitivity to the magnetic field, the magnetic field that changes due to the defect can be detected as the rotation amount of the deflection angle and used as information indicating the presence of the defect.
- the surface shape of the object to be inspected is not flat, a gap is formed between the magnetic thin film used as the magnetic transfer film and the object to be inspected, so that the magnetic field distribution on the surface of the object to be inspected is accurately transferred to the magnetic thin film. It is difficult to accurately detect defects.
- the rotation of the polarization angle of the light irradiated to the object to be inspected is caused by the incident angle of light on the object to be inspected in addition to the magnetic field distribution of the object to be inspected, so the surface shape is not flat.
- the present invention has been made in view of the above, a defect inspection apparatus and a defect inspection that can suppress a decrease in measurement accuracy of a magnetic field distribution caused by a surface shape of an object to be inspected and can improve defect detection accuracy. It aims to provide a method.
- the present invention provides interference of reflected light from the object to be inspected that is obtained via the spatial phase modulator by light irradiated to the object to be inspected via the spatial light phase modulator. Based on the state, a shape measuring unit that measures the surface shape of the object to be inspected and the object to be inspected obtained via the spatial phase modulator by light irradiated on the object to be inspected via the spatial light phase modulator.
- the magnetic field distribution measurement unit that measures the magnetization distribution of the surface of the inspection object magnetized by the excitation device that magnetizes the inspection object based on the interference state of the reflected light from the inspection object, and the shape measurement unit From the magnetic field distribution data, which is the measurement result of the magnetic field distribution of the inspection object, obtained by the magnetic field distribution measurement unit based on the surface shape data, which is the measurement result of the surface shape of the inspection object, Magnetic field existing on the surface of And that a data separating unit for separating the data of the different parts.
- the present invention it is possible to suppress a decrease in the measurement accuracy of the magnetic field distribution caused by the surface shape of the object to be inspected, and to improve the defect detection accuracy.
- FIG. 1 is a diagram schematically showing an overall configuration of a defect inspection apparatus according to an embodiment of the present invention. It is a functional block diagram which shows roughly the whole structure of a defect inspection apparatus. It is a figure shown about the optical path from a Fresnel zone plate to a focal point.
- FIG. 3 is a diagram illustrating an example of a Fresnel zone plate, which is a graph representing a relationship between a distance from an optical axis and a refractive index. An example of a Fresnel zone plate is shown in a two-dimensional display.
- phase modulation by a magneto-optical effect It is a figure which shows an example of the phase modulation by a magneto-optical effect. It is a figure which shows an example of the phase modulation by a magneto-optical effect. It is a figure which shows an example of the surface shape image obtained based on surface shape data. It is a figure which shows an example of the magnetic field distribution image obtained based on magnetic field distribution data. It is a figure which shows an example of the defect detection image obtained based on magnetic field singular part data.
- FIG. 1 is a diagram schematically showing the overall configuration of a defect inspection apparatus according to an embodiment of the present invention.
- FIG. 2 is a functional block diagram schematically showing the overall configuration of the defect inspection apparatus.
- the defect inspection apparatus is roughly composed of a control device 1, an inspection probe 2, an excitation device 3, a display device 4, and an input device 5.
- the inspection probe 2 irradiates the inspection object 100, which is an inspection object made of a ferromagnetic material such as Fe, for example, and detects reflected light from the inspection object.
- a laser light source 21 that emits light, and a spatial filter 22 for removing and shaping a noise component from the laser light emitted from the laser light source 21 to extract a Gaussian beam that is closer to the ideal and expanding it at a predetermined angle;
- the collimation lens 23 that adjusts the light shaped by the spatial filter 22 to parallel light (light beam), the quarter-wave plate 24 that converts the parallel light from the collimation lens 23 into circularly polarized light, and the incident light beam Is divided into transmitted light and reflected light, and the phase of the circularly polarized beam incident from the quarter-wave plate 24 through the beam splitter 25 is input.
- a spatial light phase modulator 26 that modulates the spatial distribution, and reflected light from the device under test 100 that is irradiated onto the device under test 100 via the spatial light phase modulator 26.
- a camera 27 for imaging the light reflected by the beam splitter 25.
- the spatial light phase modulator 26 constitutes a modulation switching unit 29 together with the modulation signal generator 28 and is generated by the modulation signal generator 28 based on a control signal from the overall control unit 11 of the control device 1 described later. The operation is controlled by the modulation signal.
- the spatial light phase modulator 26 has a function of changing the modulation content with respect to the transmitted light, switching the presence or absence of modulation, and the like based on the modulation signal from the modulation signal generation unit 28.
- the spatial light phase modulator 26 has, for example, a configuration having a liquid crystal layer, and functions equivalent to a diffraction grating or the like in which desired phase modulation is performed on transmitted light by controlling the liquid crystal layer in units of pixels by a modulation signal. And a function of switching the presence / absence of phase modulation with respect to transmitted light.
- the spatial light phase modulator 26 in the present embodiment is controlled so as to have a function equivalent to phase modulation by a Fresnel zone plate described later.
- the excitation device 3 is for AC magnetizing the device under test 100 by irradiating the device under test 100 with an AC magnetic field, and AC excitation based on a control signal from the overall control unit 11 of the control device 1 described later.
- An AC excitation power supply 32 that generates a current and an excitation coil 31 that generates a magnetic field based on the excitation current from the AC excitation power supply 32 and applies the magnetic field to the device under test 100 are provided.
- Information on the excitation current generated by the AC excitation power supply 32 in other words, information on the magnetic field generated by the excitation coil 31 and applied to the device under test 100 is sent to the overall control unit 11 together with the time information.
- control signal from the overall control unit 11 of the control device 1 is a control signal that does not generate an excitation current
- no excitation current is generated in the AC excitation power supply 32 and no magnetic field is generated in the excitation coil 31.
- a state in which a magnetic field is not applied to the device under test 100 (a magnetic field non-applied state) can be achieved.
- the control device 1 controls the operation of the defect inspection apparatus.
- the brightness of the image captured by the overall control unit 11 that controls the operation of the entire defect inspection apparatus including the control device 1 and the camera 27 of the inspection probe 2.
- the magnetic field distribution data generation unit 12 that generates magnetic field distribution data as a measurement result of the magnetic field distribution on the surface of the inspection object 100 and the camera 27 of the inspection probe 2 capture the image.
- a surface shape data generation unit 14 that generates surface shape data as a measurement result of the surface shape on the surface of the object 100 to be inspected based on the interference state of the reflected light obtained as the luminance data of the obtained image.
- the magnetic field singular part is a part where a change in the magnetic field distribution not caused by the surface shape of the object 100 to be inspected, such as a flaw or a material change on the surface of the object 100 (or inside the vicinity of the surface). This is a site where a characteristic change (hereinafter referred to as a defect) is expected to exist.
- the data separation unit 17 stores a magnetic field distribution data storage unit 13 that stores the magnetic field distribution data generated by the magnetic field distribution data generation unit 12 and a surface shape data storage that stores the surface shape data generated by the surface shape data generation unit 14. And a difference calculation unit 16 that performs a difference calculation between the magnetic field distribution data and the surface shape data.
- the input device 4 includes a mouse, a keyboard, and the like, and is used for inputting various setting values and operation instructions in the defect inspection device based on various setting screens and other information displayed on the display device 5.
- the display device 5 displays a surface shape image based on the surface shape data of the inspected object 100, a magnetic field distribution image based on the magnetic field distribution data, a defect detection image based on the magnetic field singular part data, and the like. .
- the laser light source 21, the spatial filter 22, the collimation lens 23, the quarter wavelength plate 24, the beam splitter 25, the spatial light phase modulator 26, the camera 27, and the surface shape data generation unit 14 are the spatial light phase modulator.
- the surface shape of the device under test 100 is measured based on the interference state of the reflected light from the device under test 100 obtained via the spatial phase modulator 26 with the light irradiated onto the device under test 100 via 26.
- a surface shape measurement unit is configured, and a laser light source 21, a spatial filter 22, a collimation lens 23, a quarter wavelength plate 24, a beam splitter 25, a spatial light phase modulator 26, an excitation device 3, a camera 27, and magnetic field distribution data generation
- the unit 12 is a test object obtained via the spatial phase modulator 26 by the light irradiated to the device under test 100 via the spatial light phase modulator 26. Based on the interference condition of reflected light from the body 100, constituting the magnetic field distribution measuring unit for measuring the magnetization distribution of the object to be inspected 100.
- FIG. 3 shows the optical path from the Fresnel zone plate to the focal point.
- 4 and 5 show an example of the Fresnel zone plate.
- FIG. 4 is a graph representing the relationship between the distance from the optical axis and the refractive index
- FIG. 5 is a two-dimensional display.
- the Fresnel zone plate can be represented by a distribution of interference fringes formed when light emitted from a certain point reaches a plane.
- ⁇ is the diameter of the Fresnel zone plate
- f is the focal length
- r is the distance from the Fresnel zone plate to the focal point
- ⁇ is the angle formed by the optical axis and the line segment of r
- n1 and n2 are the Fresnel zone plate It is the refractive index of each part.
- the distance r to the focal point is calculated by the following (formula 1).
- the distribution of interference fringes is calculated by the following (Formula 2).
- a Fresnel zone plate (see FIG. 5) can be defined.
- FIG. 6 to 8 are diagrams for explaining the propagation of light in the present embodiment, and are diagrams schematically showing the configuration of the inspection probe together with the object to be inspected.
- FIG. 6 is a view showing the irradiation light to the object to be inspected and the reflected light from the object to be inspected
- FIG. 7 is a view showing the irradiation light to the object to be inspected
- FIG. 8 is the reflection from the inspection object. It is a figure which extracts and shows light. 6 to 8 exemplify the case where the device under test 100 is a plane perpendicular to the optical axis of the irradiation light for the purpose of explaining the principle of the present invention.
- the laser beam 60 emitted from the laser light source 21 is incident on the spatial filter 22 and is shaped by removing the noise component, and is spread by a predetermined angle, and is collimated by the collimation lens 23. It is adjusted to light (light beam).
- the light beams 61 and 62 adjusted to parallel light by the collimation lens 23 are circularly polarized by the quarter wavelength plate 24. It is converted and incident on the beam splitter 25.
- the light beam incident on the beam splitter 25 from the quarter-wave plate 24 is divided into transmitted light 61 and 62 and reflected light (not shown), and the transmitted light 61 and 62 among them is the spatial light phase modulator 26. Is incident on.
- the spatial light phase modulator 26 When the spatial light phase modulator 26 is controlled by the overall control unit 11 to function as a Fresnel zone plate, when the light beam 61 passes through the spatial light phase modulator 26, the transmitted light 61a propagates along the optical axis 21a. (0th-order light) and diffracted light 61b (first-order diffracted light) that is diffracted and propagates in the direction of the intersection with the optical axis 21a of the device under test 100 is generated (see FIG. 7 and the like). Similarly, when the light beam 62 passes through the spatial light phase modulator 26, the transmitted light 62a (0th-order light) propagating along the optical axis 21a and the point of intersection with the optical axis 21a of the device under test 100 are diffracted. Diffracted light 62b (first-order diffracted light) propagating in the direction is generated (see FIG. 7 and the like).
- the transmitted light 61a is reflected in the direction along the optical axis 21a (reflected light 161a), and the diffracted light 61b is reflected toward the position where the light beam 62 of the spatial light phase modulator 26 passes.
- Reflected light 161b see FIG. 8 and the like.
- the transmitted light 62a is reflected in the direction along the optical axis 21a (reflected light 162a), and the diffracted light 61b is directed to the position where the light beam 61 of the spatial light phase modulator 26 passes.
- Reflected light 162b see FIG. 8 and the like.
- the phases of the reflected lights 161a, 161b, 162a, and 162b change depending on the surface shape and the magnetization state of the device under test 100, respectively.
- the diffracted light of the reflected light 162b propagating along the optical axis 21a and the transmitted light of the reflected light 161a are converted into the light beam 161, and the beam splitter 25. And is captured by the camera 27.
- the diffracted light of the reflected light 161b propagating along the optical axis 21a and the transmitted light of the reflected light 162a are obtained as a light beam 162. Reflected by the beam splitter 25 and imaged by the camera 27.
- the reflected light from the inspected object 100 of the transmitted light (0th order light) is object light
- the reflected light of the diffracted light (first order diffracted light) from the inspected object 100 is reference light.
- the phase difference between the reflected light 161a and the reflected light 162b, and the phase difference between the reflected light 162a and the reflected light 161b appears as a change in interference light intensity. That is, phase difference distribution data is obtained based on the interference light intensity distribution image data obtained by the camera 27, and surface shape data and magnetic field distribution data are obtained based on this.
- FIG. 9 is a diagram schematically illustrating a state in which a magnetic field is applied to an example of an inspection object having a defect on the surface
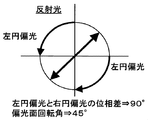
- FIGS. 10 and 11 are diagrams illustrating an example of phase modulation by a magneto-optic effect. is there.
- FIG. 9 when a magnetic field is applied to the surface of the inspection object 100, it can be seen that the direction of magnetization is different from other parts in the positions of defects and the like. That is, as shown in FIGS. 10 and 11, the phase modulation in the Kerr effect of the phase of reflected light (see FIG. 11) with respect to the phase of incident light (see FIG. 10) is different between the defect position and the other positions. In this embodiment, a defect is to be detected based on such knowledge.
- FIG. 12 is a diagram illustrating an example of a surface shape image obtained based on the surface shape data
- FIG. 13 is a diagram illustrating an example of a magnetic field distribution image obtained based on the magnetic field distribution data
- FIG. It is a figure which shows an example of the defect detection image obtained based on data.
- the interference state of the reflected light from the inspection object 100 obtained via the spatial phase modulator 26 by the light irradiated to the inspection object via the spatial light phase modulator 26 is obtained via the spatial phase modulator 26.
- a magnetic field distribution measuring step for measuring the magnetic field distribution on the surface of the object to be inspected 100 magnetized by the excitation device 3 for magnetizing the object to be inspected 100 based on the interference state of the reflected light from the object to be inspected 100; Based on the surface shape data that is the measurement result of the surface shape of 100, the magnetic field singular part 100 that exists on the surface of the inspection object 100 from the magnetic field distribution data that is the measurement result of the magnetic field distribution of the inspection object 100. It composed of a data separating step of separating the data.
- the object to be inspected 100 is irradiated with light and the reflected light is reflected via the spatial light phase modulator 26 functioning as a Fresnel plate in a state in which the object to be inspected 100 is not magnetized by the excitation device 3.
- Imaging by the camera 27 is performed, and surface shape data is obtained from the obtained image by the surface shape data generation unit 14.
- the surface shape data generation unit 14 based on the interference state of the reflected light obtained as the luminance data of the image obtained by the camera 27, the surface shape of the inspected object 100 (the position of each part in the optical axis direction and the light on the surface). An angle formed with the axis) is calculated and stored in the surface shape data storage unit 15 as surface shape data.
- the surface shape data obtained in this way indicates information related to the surface shape of the device under test 100, and can be expressed as a surface shape image by a predetermined process (see FIG. 12).
- the object to be inspected 100 is irradiated with light and the reflected light is reflected via the spatial light phase modulator 26 functioning as a Fresnel plate in a state where the object to be inspected 100 is magnetized by the excitation device 3.
- Imaging by the camera 27 is performed, and magnetic field distribution data is obtained from the obtained image by the magnetic field distribution data generation unit 12.
- the magnetic field distribution data generation unit 12 based on the interference state of the reflected light obtained as the luminance data of the image obtained by the camera 27, the magnetic field distribution of the device under test 100 (the direction of magnetization of each part at each magnetic field application time) And the like are stored in the magnetic field distribution data storage unit 13 as magnetic field distribution data.
- the magnetic field distribution data obtained in this way includes information on both the surface shape of the object 100 to be inspected and the magnetic field singular part 100b that may be caused by defects, and is expressed as a magnetic field distribution image by a predetermined process. (See FIG. 13).
- the data separation unit 17 calculates a difference between the magnetic field distribution data stored in the magnetic field distribution data storage unit 13 and the surface shape data stored in the surface shape data storage unit 15, thereby eliminating defects.
- Magnetic field singular part data including only the magnetic field singular part 100b which is considered to be caused is obtained.
- the magnetic field singular part data obtained in this way can be expressed as a defect detection image by a predetermined process (see FIG. 14).
- the defect detection image obtained by the defect inspection process is stored in the storage unit included in the overall control unit 11 of the control device 1 and displayed on the display device 4 and the like together with the surface shape image and the magnetic field distribution image.
- the surface shape measurement step by appropriately controlling the phase change of the spatial light phase modulator 26, laser measurement for accurately measuring the position of the inspection object 100 with respect to the defect inspection apparatus, or inspection of the defect inspection apparatus. Error detection of the position of the body 100 can be performed.
- the magneto-optical effect as used in the prior art is a physical phenomenon in which when a target magnetic material is irradiated with light, the polarization angle of the irradiated light rotates according to the magnetization state of the magnetic material. Those related to transmitted light are called the Faraday effect, and those related to reflected light are called the Kerr effect.
- the rotation amount of the polarization angle is sensitivity to the magnetic field, the magnetic field that changes due to the defect can be detected as the rotation amount of the deflection angle and used as information indicating the presence of the defect.
- the surface shape of the object to be inspected is not flat, a gap is formed between the magnetic thin film used as the magnetic transfer film and the object to be inspected, so that the magnetic field distribution on the surface of the object to be inspected is accurately transferred to the magnetic thin film. It is difficult to accurately detect defects.
- the rotation of the polarization angle of the light irradiated to the object to be inspected is caused by the incident angle of light on the object to be inspected in addition to the magnetic field distribution of the object to be inspected, so the surface shape is not flat.
- interference of reflected light from the inspected object 100 obtained through the spatial phase modulator 26 due to light irradiated on the inspected object through the spatial light phase modulator 26 Based on the state, the surface shape of the device under test 100 is measured, and the device under test obtained through the spatial phase modulator 26 by the light irradiated onto the device under test 100 through the spatial light phase modulator 26. Based on the interference state of the reflected light from the body 100, the magnetic field distribution of the surface of the inspection object 100 magnetized by the excitation device 3 that magnetizes the inspection object 100 is measured, and the surface shape of the inspection object 100 is measured.
- the magnetic field distribution data that is the measurement result of the magnetic field distribution of the inspection object 100 is separated from the data of the magnetic field singular part 100b that exists on the surface of the inspection object 100. Because, it is possible to suppress a decrease in measurement accuracy of the magnetic field distribution caused by the surface shape of the inspection object, it is possible to improve the defect detection precision.
- the beam splitter 25 and the spatial light phase modulator 26 are arranged on the path of the irradiation light and the reflected light on the surface of the object 100 to be inspected, and the object light (0th order light) and Since the configuration is such that the reference light (first-order diffracted light) passes through the path of the same environment, phase noise is canceled out, and defect detection can be performed with higher accuracy.
- the surface shape measuring unit includes a laser light source 21, a spatial filter 22 that shapes light emitted from the laser light source 21, a collimation lens 23 that adjusts light from the spatial filter 22 to parallel light, and a collimation lens 23.
- a quarter-wave plate 24 that converts the parallel light into a circularly polarized beam, a beam splitter 25 that splits the incident light into transmitted light and reflected light, and the quarter-wave plate 24 that passes through the beam splitter 25.
- the spatial light phase modulator 26 that modulates the spatial distribution of the phase of the incident circularly polarized beam, and the reflected light from the inspection object 100 that is irradiated onto the inspection object 100 via the spatial light phase modulator 26
- a camera 27 that captures light reflected by the beam splitter 25 via the spatial light phase modulator 26, and luminance data of an image captured by the camera 27. Since the surface shape data generation unit 14 for generating the surface shape data of the surface of the inspection object 100 is provided based on the interference state of the reflected light, the surface shape of the inspection object 100 is accurately measured. be able to.
Landscapes
- Chemical & Material Sciences (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Analytical Chemistry (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Immunology (AREA)
- Biochemistry (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
- Investigating Or Analysing Materials By Optical Means (AREA)
- Measuring Magnetic Variables (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Description

2 検査プローブ
3 励磁装置
4 表示装置
5 入力装置
11 全体制御部
12 磁場分布データ生成部
13 磁場分布データ記憶部
14 表面形状データ生成部
15 表面形状データ記憶部
16 差分演算部
17 データ分離部
21 レーザ光源
22 空間フィルタ
23 コリメーションレンズ
24 1/4波長板
25 ビームスプリッタ
26 空間光位相変調器
27 カメラ
28 変調信号生成器
29 変調切換部
31 励磁コイル
32 交流励磁電源
100 被検査体(検査対象物)
Claims (8)
- 空間光位相変調器を介して被検査体に照射された光により、前記空間位相変調器を介して得られる前記被検査体からの反射光の干渉状態に基づいて、前記被検査体の表面形状を計測する表面形状計測部と、
空間光位相変調器を介して被検査体に照射された光により、前記空間位相変調器を介して得られる前記被検査体からの反射光の干渉状態に基づいて、前記被検査体を磁化する励磁装置により磁化された前記被検査体の表面の磁場分布を計測する磁場分布計測部と、
前記表面形状計測部により得られた前記被検査体の表面形状の計測結果である表面形状データに基づいて、前記磁場分布計測部により得られた前記被検査体の磁場分布の計測結果である磁場分布データから前記被検査体の表面に存在する磁場特異部のデータを分離するデータ分離部と
を備えたことを特徴とする欠陥検査装置。 - 請求項1記載の欠陥検査装置において、
前記磁場分布計測部は、
レーザ光源と、
前記レーザ光源から出射された光を整形する空間フィルタと、
前記空間フィルタからの光を平行光に調整するコリメーションレンズと、
前記コリメーションレンズからの平行光を円偏光ビームに変換する1/4波長板と、
入射された光を透過光と反射光に分割するビームスプリッタと、
前記1/4波長板から前記ビームスプリッタを透過して入射された円偏光ビームの位相の空間分布を変調する空間光位相変調器と、
空間光位相変調器を介して被検査体に照射された光の前記被検査体からの反射光であって、前記空間光位相変調器を介して前記ビームスプリッタで反射された光を撮像するカメラと、
前記被検査体を磁化する励磁コイルと、前記励磁コイルに励磁電流を印加する交流励磁電源とを有する励磁装置と、
前記カメラで撮像された画像の輝度データとして得られる反射光の干渉状態に基づいて、前記被検査体の表面の磁場分布データを生成する磁場分布データ生成部と
を備えたことを特徴とする欠陥検査装置。 - 請求項1記載の欠陥検査装置において、
前記表面形状計測部は、
レーザ光源と、
前記レーザ光源から出射された光を整形する空間フィルタと、
前記空間フィルタからの光を平行光に調整するコリメーションレンズと、
前記コリメーションレンズからの平行光を円偏光ビームに変換する1/4波長板と、
入射された光を透過光と反射光に分割するビームスプリッタと、
前記1/4波長板から前記ビームスプリッタを透過して入射された円偏光ビームの位相の空間分布を変調する空間光位相変調器と、
空間光位相変調器を介して被検査体に照射された光の前記被検査体からの反射光であって、前記空間光位相変調器を介して前記ビームスプリッタで反射された光を撮像するカメラと、
前記カメラで撮像された画像の輝度データとして得られる反射光の干渉状態に基づいて、前記被検査体の表面の表面形状データを生成する表面形状データ生成部と
を備えたことを特徴とする欠陥検査装置。 - 請求項1記載の欠陥検査装置において、
前記データ分離部は、
前記表面形状計測部により得られた前記被検査体の表面形状データを記憶する表面形状データ記憶部と、
前記磁場分布計測部により得られた前記被検査体の磁場分布データを記憶する磁場分布データ記憶部と、
前記磁場分布データと前記表面形状データとの差分演算を行う差分演算部と
を備えたことを特徴とする欠陥検査装置。 - 請求項1記載の欠陥検査装置において、
前記磁場分布計測部及び前記表面形状計測部は、
レーザ光源からの光を平行光に調整するコリメーションレンズと、平行光を円偏光ビームに変換する1/4波長板とを介して入射された光を透過光と反射光に分割するビームスプリッタと、
前記1/4波長板から前記ビームスプリッタを透過して入射された円偏光ビームの位相の空間分布を変調する空間光位相変調器と、
空間光位相変調器を介して被検査体に照射され、前記被検査体から物体光及び参照光として反射された光であって、前記空間光位相変調器を介して前記ビームスプリッタで反射された光を撮像するカメラとを備え、
表面形状計測部及び磁場分布計測部は、前記被検査体からの物体光及び参照光の干渉状態に基づいて前記被検査体の表面形状及び磁場分布を計測することを特徴とする欠陥検査装置。 - 請求項3記載の欠陥検査装置において、
前記空間光位相変調器を制御し、前記被検査体に照射される光の変調の有無を切り換える変調切換制御部を備え、
前記空間光位相変調器による光の変調を行わない状態での前記被検査体への光の照射により、前記被検査体の光軸方向の位置を取得する距離計測機能を有することを特徴とする欠陥検査装置。 - レーザ光源と、
前記レーザ光源から出射された光を整形する空間フィルタと、
前記空間フィルタからの光を平行光に調整するコリメーションレンズと、
前記コリメーションレンズからの平行光を円偏光ビームに変換する1/4波長板と、
入射された光を透過光と反射光に分割するビームスプリッタと、
前記1/4波長板から前記ビームスプリッタを透過して入射された円偏光ビームの位相の空間分布を変調する空間光位相変調器と、
空間光位相変調器を介して被検査体に照射された光の前記被検査体からの反射光であって、前記空間光位相変調器を介して前記ビームスプリッタで反射された光を撮像するカメラと、
前記被検査体を磁化する励磁装置と、
前記励磁装置を制御し、前記被検査体の磁化の有無を切り換える磁化切換制御部と、
前記被検査体からの反射光の干渉状態に基づいて前記被検査体の表面形状を計測する表面形状計測部により得られた前記被検査体の表面形状の計測結果である表面形状データに基づいて、前記被検査体からの反射光の干渉状態に基づいて前記被検査体の表面の磁場分布を計測する磁場分布計測部により得られた前記被検査体の磁場分布の計測結果である磁場分布データから前記被検査体の表面に存在する磁場特異部のデータを分離するデータ分離部と、
を備えたことを特徴とする欠陥検査装置。 - 空間光位相変調器を介して被検査体に照射された光により、前記空間位相変調器を介して得られる前記被検査体からの反射光の干渉状態に基づいて、前記被検査体の表面形状を計測する表面形状計測ステップと、
空間光位相変調器を介して被検査体に照射された光により、前記空間位相変調器を介して得られる前記被検査体からの反射光の干渉状態に基づいて、前記被検査体を磁化する励磁装置により磁化された前記被検査体の表面の磁場分布を計測する磁場分布計測ステップと、
前記被検査体の表面形状の計測結果である表面形状データに基づいて、前記被検査体の磁場分布の計測結果である磁場分布データから前記被検査体の表面に存在する磁場特異部のデータを分離するデータ分離ステップと
を有することを特徴とする欠陥検査方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/528,013 US10317368B2 (en) | 2014-11-28 | 2014-11-28 | Defect inspection device and defect inspection method |
| EP14906922.1A EP3225983A4 (en) | 2014-11-28 | 2014-11-28 | Defect inspection device and defect inspection method |
| JP2016561207A JP6236546B2 (ja) | 2014-11-28 | 2014-11-28 | 欠陥検査装置及び欠陥検査方法 |
| PCT/JP2014/081653 WO2016084261A1 (ja) | 2014-11-28 | 2014-11-28 | 欠陥検査装置及び欠陥検査方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/081653 WO2016084261A1 (ja) | 2014-11-28 | 2014-11-28 | 欠陥検査装置及び欠陥検査方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016084261A1 true WO2016084261A1 (ja) | 2016-06-02 |
Family
ID=56073862
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/081653 Ceased WO2016084261A1 (ja) | 2014-11-28 | 2014-11-28 | 欠陥検査装置及び欠陥検査方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10317368B2 (ja) |
| EP (1) | EP3225983A4 (ja) |
| JP (1) | JP6236546B2 (ja) |
| WO (1) | WO2016084261A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018084011A1 (ja) * | 2016-11-04 | 2018-05-11 | 横河電機株式会社 | 減肉検出装置、減肉検出システム、減肉検出方法及びプログラム |
| JP2018081070A (ja) * | 2016-11-04 | 2018-05-24 | 横河電機株式会社 | 減肉検出装置、減肉検出システム、減肉検出方法及びプログラム。 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10197516B2 (en) * | 2016-04-07 | 2019-02-05 | Ford Global Technologies, Llc | Non-contact quality control of fiber composites |
| US11506633B2 (en) * | 2020-07-24 | 2022-11-22 | Dell Products L.P. | System and method for service life management based on proactive remediation of corrosion enhancing defects |
| CN112684460B (zh) * | 2020-12-21 | 2024-03-22 | 武汉光目科技有限公司 | 一种面阵扫频测量装置和方法 |
| KR102790888B1 (ko) | 2021-11-11 | 2025-04-04 | 주식회사 로보로 | 광학촬영소자와 전자기센서어레이를 융합한 검사 장치 |
| CN116318475B (zh) * | 2023-05-16 | 2023-07-21 | 武汉能钠智能装备技术股份有限公司四川省成都市分公司 | 无线电频谱监控系统及方法 |
| CN119274701B (zh) * | 2024-08-20 | 2025-04-08 | 江西尚朋电子科技有限公司 | 一种磁性材料产品表面缺陷模拟方法及系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07287059A (ja) * | 1994-04-15 | 1995-10-31 | Nippon Steel Corp | 磁性材料の磁区検出装置 |
| JPH09280953A (ja) * | 1996-04-18 | 1997-10-31 | Toyota Motor Corp | 光−磁気光学効果測定装置 |
| JP2005315590A (ja) * | 2004-04-27 | 2005-11-10 | Hitachi High-Tech Electronics Engineering Co Ltd | 磁気ディスク欠陥検査方法および検査装置 |
| JP2010537355A (ja) * | 2007-08-13 | 2010-12-02 | エージェンシー フォー サイエンス, テクノロジー アンド リサーチ | 磁気媒体の磁気特性を検査するための方法および装置 |
| JP2014153318A (ja) * | 2013-02-13 | 2014-08-25 | Hitachi Ltd | 検査装置および検査方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5235400A (en) * | 1988-10-12 | 1993-08-10 | Hitachi, Ltd. | Method of and apparatus for detecting defect on photomask |
| US8810796B2 (en) * | 2009-04-21 | 2014-08-19 | Michigan Aerospace Corporation | Light processing system and method |
| JP5337578B2 (ja) * | 2009-05-28 | 2013-11-06 | 株式会社日立ハイテクノロジーズ | 微細凹凸パターンの欠陥判定方法、および、パターンドメディアの欠陥判定方法 |
| US9778202B2 (en) * | 2010-10-12 | 2017-10-03 | Indian Institute Of Technology Kanpur | Systems and methods for imaging characteristics of a sample and for identifying regions of damage in the sample |
| JP6185250B2 (ja) | 2013-02-08 | 2017-08-23 | 岡田工業株式会社 | 遠隔設備管理システムおよび管理装置 |
| JP6578118B2 (ja) * | 2014-04-04 | 2019-09-18 | 株式会社ニューフレアテクノロジー | 撮像装置、検査装置および検査方法 |
-
2014
- 2014-11-28 WO PCT/JP2014/081653 patent/WO2016084261A1/ja not_active Ceased
- 2014-11-28 EP EP14906922.1A patent/EP3225983A4/en not_active Withdrawn
- 2014-11-28 JP JP2016561207A patent/JP6236546B2/ja active Active
- 2014-11-28 US US15/528,013 patent/US10317368B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07287059A (ja) * | 1994-04-15 | 1995-10-31 | Nippon Steel Corp | 磁性材料の磁区検出装置 |
| JPH09280953A (ja) * | 1996-04-18 | 1997-10-31 | Toyota Motor Corp | 光−磁気光学効果測定装置 |
| JP2005315590A (ja) * | 2004-04-27 | 2005-11-10 | Hitachi High-Tech Electronics Engineering Co Ltd | 磁気ディスク欠陥検査方法および検査装置 |
| JP2010537355A (ja) * | 2007-08-13 | 2010-12-02 | エージェンシー フォー サイエンス, テクノロジー アンド リサーチ | 磁気媒体の磁気特性を検査するための方法および装置 |
| JP2014153318A (ja) * | 2013-02-13 | 2014-08-25 | Hitachi Ltd | 検査装置および検査方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3225983A4 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018084011A1 (ja) * | 2016-11-04 | 2018-05-11 | 横河電機株式会社 | 減肉検出装置、減肉検出システム、減肉検出方法及びプログラム |
| JP2018081070A (ja) * | 2016-11-04 | 2018-05-24 | 横河電機株式会社 | 減肉検出装置、減肉検出システム、減肉検出方法及びプログラム。 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3225983A4 (en) | 2018-05-30 |
| JPWO2016084261A1 (ja) | 2017-09-21 |
| JP6236546B2 (ja) | 2017-11-22 |
| EP3225983A1 (en) | 2017-10-04 |
| US10317368B2 (en) | 2019-06-11 |
| US20170328864A1 (en) | 2017-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6236546B2 (ja) | 欠陥検査装置及び欠陥検査方法 | |
| JP6037386B2 (ja) | 検査装置および検査方法 | |
| JP6328468B2 (ja) | 欠陥検査装置および検査方法 | |
| TW201825864A (zh) | 用於圖案化半導體特徵之特徵化的掃描白光干涉測量系統 | |
| CN108195928B (zh) | 一种基于图像融合的金属磁性材料缺陷检测装置 | |
| JP6074908B2 (ja) | 表面検査装置および欠陥計測方法 | |
| Joubert et al. | Linear magneto-optic imager for non-destructive evaluation | |
| Li et al. | Weld cracks nondestructive testing based on magneto-optical imaging under alternating magnetic field excitation | |
| WO2016027797A1 (ja) | ゴーストイメージングを利用した物質測定装置 | |
| JP6342479B2 (ja) | 検査プローブ、検査システム、及び検査方法 | |
| WO2022059710A1 (ja) | 欠陥検査装置 | |
| US20220051390A1 (en) | Defect inspection apparatus and defect inspection method | |
| JP2015121409A (ja) | 埋設管検査装置及び埋設管検査方法 | |
| US9267898B2 (en) | Optical inspection method and optical inspection apparatus | |
| JP2009168593A (ja) | 形状測定装置 | |
| US20060146328A1 (en) | Magneto-optical imaging method and device | |
| Eftekhari et al. | Miniaturized magneto-optical imaging sensor for crack and micro-crack detection | |
| JP2012015464A (ja) | 欠陥検査装置 | |
| US7365533B2 (en) | Magneto-optic remote sensor for angular rotation, linear displacements, and evaluation of surface deformations | |
| EP2902777B1 (en) | Electron gun abnormality detector and electron gun abnormality detection method | |
| JP5825622B2 (ja) | 変位・ひずみ分布計測光学系と計測手法 | |
| EP3734313B1 (en) | Method for extracting a transverse magneto-optic effect signal | |
| JPH0854452A (ja) | 磁場測定方法および磁場測定装置 | |
| JP2023142687A (ja) | 偏光顕微鏡装置及び視野内補正解析方法 | |
| RU2539828C1 (ru) | Спектральный эллипсометр с устройством магнитодинамических измерений |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14906922 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2016561207 Country of ref document: JP Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2014906922 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15528013 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |