WO2016103709A1 - 音声処理装置 - Google Patents
音声処理装置 Download PDFInfo
- Publication number
- WO2016103709A1 WO2016103709A1 PCT/JP2015/006446 JP2015006446W WO2016103709A1 WO 2016103709 A1 WO2016103709 A1 WO 2016103709A1 JP 2015006446 W JP2015006446 W JP 2015006446W WO 2016103709 A1 WO2016103709 A1 WO 2016103709A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sound
- source
- microphones
- microphone
- voice
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L15/00—Speech recognition
- G10L15/20—Speech recognition techniques specially adapted for robustness in adverse environments, e.g. in noise, of stress induced speech
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/80—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received using ultrasonic, sonic or infrasonic waves
- G01S3/801—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/80—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received using ultrasonic, sonic or infrasonic waves
- G01S3/802—Systems for determining direction or deviation from predetermined direction
- G01S3/808—Systems for determining direction or deviation from predetermined direction using transducers spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/80—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received using ultrasonic, sonic or infrasonic waves
- G01S3/86—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves, or particle emission, not having a directional significance, are being received using ultrasonic, sonic or infrasonic waves with means for eliminating undesired waves, e.g. disturbing noises
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L15/00—Speech recognition
- G10L15/28—Constructional details of speech recognition systems
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L21/00—Speech or voice signal processing techniques to produce another audible or non-audible signal, e.g. visual or tactile, in order to modify its quality or its intelligibility
- G10L21/02—Speech enhancement, e.g. noise reduction or echo cancellation
- G10L21/0208—Noise filtering
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L21/00—Speech or voice signal processing techniques to produce another audible or non-audible signal, e.g. visual or tactile, in order to modify its quality or its intelligibility
- G10L21/02—Speech enhancement, e.g. noise reduction or echo cancellation
- G10L21/0208—Noise filtering
- G10L21/0216—Noise filtering characterised by the method used for estimating noise
- G10L21/0232—Processing in the frequency domain
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L25/00—Speech or voice analysis techniques not restricted to a single one of groups G10L15/00 - G10L21/00
- G10L25/78—Detection of presence or absence of voice signals
- G10L25/81—Detection of presence or absence of voice signals for discriminating voice from music
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L25/00—Speech or voice analysis techniques not restricted to a single one of groups G10L15/00 - G10L21/00
- G10L25/78—Detection of presence or absence of voice signals
- G10L25/84—Detection of presence or absence of voice signals for discriminating voice from noise
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R1/00—Details of transducers, loudspeakers or microphones
- H04R1/20—Arrangements for obtaining desired frequency or directional characteristics
- H04R1/32—Arrangements for obtaining desired frequency or directional characteristics for obtaining desired directional characteristic only
- H04R1/40—Arrangements for obtaining desired frequency or directional characteristics for obtaining desired directional characteristic only by combining a number of identical transducers
- H04R1/406—Arrangements for obtaining desired frequency or directional characteristics for obtaining desired directional characteristic only by combining a number of identical transducers microphones
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R3/00—Circuits for transducers
- H04R3/005—Circuits for transducers for combining the signals of two or more microphones
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L15/00—Speech recognition
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L21/00—Speech or voice signal processing techniques to produce another audible or non-audible signal, e.g. visual or tactile, in order to modify its quality or its intelligibility
- G10L21/02—Speech enhancement, e.g. noise reduction or echo cancellation
- G10L21/0208—Noise filtering
- G10L2021/02085—Periodic noise
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L21/00—Speech or voice signal processing techniques to produce another audible or non-audible signal, e.g. visual or tactile, in order to modify its quality or its intelligibility
- G10L21/02—Speech enhancement, e.g. noise reduction or echo cancellation
- G10L21/0208—Noise filtering
- G10L2021/02087—Noise filtering the noise being separate speech, e.g. cocktail party
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10L—SPEECH ANALYSIS TECHNIQUES OR SPEECH SYNTHESIS; SPEECH RECOGNITION; SPEECH OR VOICE PROCESSING TECHNIQUES; SPEECH OR AUDIO CODING OR DECODING
- G10L21/00—Speech or voice signal processing techniques to produce another audible or non-audible signal, e.g. visual or tactile, in order to modify its quality or its intelligibility
- G10L21/02—Speech enhancement, e.g. noise reduction or echo cancellation
- G10L21/0208—Noise filtering
- G10L21/0216—Noise filtering characterised by the method used for estimating noise
- G10L2021/02161—Number of inputs available containing the signal or the noise to be suppressed
- G10L2021/02166—Microphone arrays; Beamforming
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R2499/00—Aspects covered by H04R or H04S not otherwise provided for in their subgroups
- H04R2499/10—General applications
- H04R2499/13—Acoustic transducers and sound field adaptation in vehicles
Definitions
- Various devices are provided in vehicles such as automobiles. Operations on these various devices are performed, for example, by operating operation buttons, operation panels, and the like.
- An object of the present invention is to provide a good speech processing apparatus capable of improving the certainty of speech recognition.
- a plurality of microphones arranged in a vehicle and a sound source that is a sound source included in a sound reception signal acquired by each of the plurality of microphones is located in the near field.
- the sound reception signal is treated as a spherical wave to determine the direction of the sound source.
- the sound reception signal is treated as a plane wave and the direction of the sound source is determined.
- a sound source azimuth determining unit that determines the sound source, and a beam forming processing unit that performs beam forming so as to suppress sound coming from an azimuth range other than the azimuth range including the azimuth of the sound source.
- a processing device is provided.
- FIG. 12 is a diagram showing the directivity (angle characteristic) when the beamformer and the sound source direction determination cancellation processing are combined. The solid line indicates the directivity of the beamformer.
- the modeling processing unit 58 includes a non-linear mapping processing unit 60, a linear filter 62, and a non-linear mapping processing unit 64.
- the modeling processing unit 58 generates a reference noise signal by performing a modeling process on the sine wave output from the fundamental wave determination unit 56.
- the reference noise signal output from the modeling processing unit 58 is a reference signal for removing noise from a signal including noise.
- the reference noise signal is input to a noise removal processing unit 66 provided in the post-processing unit 14.
- a signal including noise from the processing unit 12 is also input to the noise removal processing unit 66.
- the noise removal processing unit 66 removes noise from a signal including noise by using a reference noise signal and using a normalization least squares algorithm.
- the noise removal processing unit 66 outputs a signal from which noise has been removed.
- step S3 the direction of the voice source 72 that made the call is determined.
- the determination of the direction of the sound source 72 is performed by the sound source direction determination unit 16 and the like as described above.
- the directivity of the beamformer is set according to the direction of the sound source 72 (step S4).
- the setting of the beamformer directivity is performed by the adaptive algorithm determination unit 18, the processing unit 12, and the like as described above.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Acoustics & Sound (AREA)
- Multimedia (AREA)
- Computational Linguistics (AREA)
- Signal Processing (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Human Computer Interaction (AREA)
- Otolaryngology (AREA)
- Quality & Reliability (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Circuit For Audible Band Transducer (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
Abstract
車両に配された複数のマイクロフォン22と、複数のマイクロフォンの各々によって取得される受音信号に含まれる音声の発生源である音声源が近傍界に位置する場合には、受音信号を球面波として扱って音声源の方位を判定し、音声源が遠方界に位置する場合には、受音信号を平面波として扱って音声源の方位を判定する音声源方位判定部16と、音声源の方位を含む方位範囲以外の方位範囲から到来する音を抑圧するようにビームフォーミングを行うビームフォーミング処理部12とを有している。
Description
本発明は、音声処理装置に関する。
自動車等の車両には、様々な機器が設けられている。これらの様々な機器に対する操作は、例えば、操作ボタンや操作パネル等を操作することにより行われている。
一方、近時では、音声認識の技術も提案されている(特許文献1~3)。
しかしながら、車両においては、様々なノイズが存在する。このため、車両内で発せられる音声に対しての音声認識は容易ではなかった。
本発明の目的は、音声認識の確実性を向上し得る良好な音声処理装置を提供することにある。
本発明の一観点によれば、車両に配された複数のマイクロフォンと、前記複数のマイクロフォンの各々によって取得される受音信号に含まれる音声の発生源である音声源が近傍界に位置する場合には、前記受音信号を球面波として扱って前記音声源の方位を判定し、前記音声源が前記遠方界に位置する場合には、前記受音信号を平面波として扱って前記音声源の方位を判定する音声源方位判定部と、前記音声源の前記方位を含む方位範囲以外の方位範囲から到来する音を抑圧するようにビームフォーミングを行うビームフォーミング処理部とを有することを特徴とする音声処理装置が提供される。
本発明によれば、音声源が近傍界に位置する場合には、音声を球面波として扱うため、音声源が近傍界に位置する場合であっても、音声源の方位を高精度に判定することができる。音声源の方位を高精度に判定し得るため、本発明によれば、目的音以外の音を確実に抑制することができる。しかも、音声源が遠方界に位置する場合には、音声を平面波として扱って音声源の方位を判定するため、音声源の方位を判定するための処理負荷を軽くすることができる。従って、本発明によれば、音声認識の確実性を向上し得る良好な音声処理装置を提供することができる。
以下、本発明の実施の形態について図面を用いて説明する。なお、本発明は以下の実施形態に限定されるものではなく、その要旨を逸脱しない範囲において適宜変更可能である。また、以下で説明する図面において、同じ機能を有するものは同一の符号を付し、その説明を省略又は簡潔にすることもある。
[一実施形態]
本発明の一実施形態による音声処理装置を図1乃至図17を用いて説明する。
本発明の一実施形態による音声処理装置を図1乃至図17を用いて説明する。
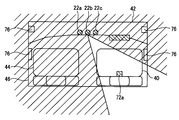
本実施形態による音声処理装置について説明するに先立って、車両の構成について図1を用いて説明する。図1は、車両の構成を示す概略図である。
図1に示すように、車両(自動車)の車体(車室)46の前部には、運転者用の座席である運転席40と助手席者用の座席である助手席44とが配されている。運転席40は、例えば車室46の右側に位置している。運転席40の前方には、ステアリングホイール(ハンドル)78が配されている。助手席44は、例えば車室46の左側に位置している。運転席40と助手席44とにより、前部座席が構成されている。運転席40の近傍には、運転者が音声を発する場合における音声源72aが位置する。助手席44の近傍には、助手席者が音声を発する場合における音声源72bが位置する。運転者も助手席者も座席40,44に着座した状態で上半身を動かし得るため、音声源72の位置は変化し得る。車体46の後部には、後部座席70が配されている。なお、ここでは、個々の音声源を区別しないで説明する場合には、符号72を用い、個々の音声源を区別して説明する場合には、符号72a、72bを用いることとする。
前部座席40,44の前方には、複数のマイクロフォン22(22a~22c)、即ち、マイクロフォンアレイが配されている。なお、ここでは、個々のマイクロフォンを区別しないで説明する場合には、符号22を用い、個々のマイクロフォンを区別して説明する場合には、符号22a~22cを用いることとする。マイクロフォン22は、ダッシュボード42に配されていてもよいし、ルーフに近い部位に配されていてもよい。
前部座席40,44の音声源72とマイクロフォン22との間の距離は、数十cm程度である場合が多い。しかし、マイクロフォン22と音声源72との間の距離は、数十cmより小さくなることもあり得る。また、マイクロフォン22と音声源72との間の距離は、1mを超えることもあり得る。
車体46の内部には、車載音響機器(カーオーディオ機器)84(図2参照)のスピーカシステムを構成するスピーカ(ラウドスピーカ)76が配されている。スピーカ76から発せられる音楽(ミュージック)は、音声認識を行う上でのノイズとなり得る。
車体46には、車両を駆動するためのエンジン80が配されている。エンジン80から発せられる音は、音声認識を行う上でのノイズとなり得る。
車両の走行中に路面の刺激によって車室46内に発生する騒音、即ち、ロードノイズも、音声認識を行う上でのノイズとなり得る。また、車両が走行する際に生ずる風切り音も、音声認識を行う上でのノイズ源となり得る。また、車体46の外部にも、ノイズ源82は存在し得る。外部ノイズ源82から発せられる音も、音声認識を行う上でのノイズとなり得る。
車体46に配された様々な機器に対する操作を、音声による指示によって行い得ると便利である。音声による指示は、例えば図示しない自動音声認識装置を用いて認識される。本実施形態による音声処理装置は、音声認識の精度の向上に資するものである。
図2は、本実施形態による音声処理装置のシステム構成を示すブロック図である。
図2に示すように、本実施形態による音声処理装置は、前処理部10と、処理部12と、後処理部14と、音声源方位判定部16と、適応アルゴリズム決定部18と、ノイズモデル決定部20とを含む。
本実施形態による音声処理装置が更に図示しない自動音声認識装置を含んでいてもよいし、本実施形態による音声処理装置と自動音声認識装置とが別個の装置であってもよい。これらの構成要素と自動音声認識装置とを含む装置は、音声処理装置と称することもできるし、自動音声認識装置と称することもできる。
前処理部10には、複数のマイクロフォン22a~22cの各々によって取得される信号、即ち、受音信号が入力されるようになっている。マイクロフォン22としては、例えば、無指向性のマイクロフォンが用いられる。
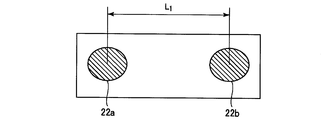
図3A及び図3Bは、マイクロフォンの配置の例を示す概略図である。図3Aは、マイクロフォン22の数が3個の場合を示している。図3Bは、マイクロフォン22の数が2個の場合を示している。複数のマイクロフォン22は、直線上に位置するように配されている。
図4A及び図4Bは、音声源が遠方界に位置する場合と近傍界に位置する場合とを示す図である。図4Aは、音声源72が遠方界に位置する場合を示しており、図4Bは、音声源72が近傍界に位置する場合を示している。dは、音声源72からマイクロフォン22までの距離の差を示している。θは、音声源72の方位を示している。
図4Aに示すように、音声源72が遠方界に位置する場合には、マイクロフォン22に到達する音声は、平面波とみなすことができる。このため、本実施形態では、音声源72が遠方界に位置する場合には、マイクロフォン22に到達する音声を平面波として取り扱って、音声源72の方位(方向)、即ち、音源方位(DOA:Direction Of Arrival)を判定する。マイクロフォン22に到達する音声を平面波として扱うことが可能なため、音声源72が遠方界に位置する場合には、2個のマイクロフォン22を用いて音声源72の方位を判定し得る。なお、音声源72の位置やマイクロフォン22の配置によっては、マイクロフォン22の数が2個の場合であっても、近傍界に位置する音声源72の方位を判定し得る。
図4Bに示すように、音声源72が近傍界に位置する場合には、マイクロフォン22に到達する音声は、球面波とみなすことができる。このため、本実施形態では、音声源72が近傍界に位置する場合には、マイクロフォン22に到達する音声を球面波として扱って、音声源72の方位を判定する。マイクロフォン22に到達する音声を球面波として扱うことを要するため、音声源72が近傍界に位置する場合には、少なくとも3個のマイクロフォン22を用いて音声源72の方位を判定する。ここでは、説明の簡略化のため、マイクロフォン22の数を3個とする場合を例に説明する。
マイクロフォン22aとマイクロフォン22bとの距離L1は、比較的長く設定されている。マイクロフォン22bとマイクロフォン22cとの距離L2は、比較的短く設定されている。
本実施形態において距離L1と距離L2とを異ならせているのは、以下のような理由によるものである。即ち、本実施形態では、各々のマイクロフォン22に到達する音声(受音信号の到来時間差(TDOA:Time Delay Of Arrival)に基づいて、音声源72の方位を特定する。周波数が比較的低い音声は波長が比較的長いため、周波数が比較的低い音声に対応するためには、マイクロフォン22間の距離を比較的大きく設定することが好ましい。このため、本実施形態では、マイクロフォン22aとマイクロフォン22bとの間の距離L1を比較的長く設定している。一方、周波数が比較的高い音声は波長が比較的短いため、周波数が比較的高い音声に対応するためには、マイクロフォン22間の距離を比較的小さく設定することが好ましい。そこで、本実施形態では、マイクロフォン22bとマイクロフォン22cとの間の距離L2を比較的短く設定している。
マイクロフォン22aとマイクロフォン22bとの間の距離L1は、例えば3400Hz以下の周波数の音声に対して好適とすべく、例えば5cm程度とする。マイクロフォン22bとマイクロフォン22cとの間の距離L2は、例えば3400Hzを超える周波数の音声に対して好適とすべく、例えば2.5cm程度とする。なお、距離L1、L2は、これらに限定されるものではなく、適宜設定し得る。
本実施形態において、音声源72が遠方界に位置する場合に、マイクロフォン22に到達する音声を平面波として扱うのは、音声を平面波として扱う場合の方が、音声を球面波として扱う場合よりも、音声源72の方位を判定するための処理が簡略なためである。このため、本実施形態では、音声源72が遠方界に位置する場合には、マイクロフォン22に到達する音声を平面波として扱う。マイクロフォン22に到達する音声を平面波として扱うため、遠方界に位置する音声源72の方位を判定する際には、音声源72の方位を判定するための処理の負荷を軽くすることができる。
なお、音声源72の方位を判定するための処理の付加は重くなるが、音声源72が近傍界に位置する場合には、マイクロフォン22に到達する音声を球面波として扱う。音声源72が近傍界に位置する場合には、マイクロフォン22に到達する音声を球面波として扱わないと、音声源72の方位を正確に判定し得ないためである。
このように、本実施形態では、音声源72が遠方界に位置する場合には、音声を平面波として扱って音声源72の方位を判定し、音声源72が近傍界に位置する場合には、音声を球面波として扱って音声源72の方位を判定する。
図2に示すように、複数のマイクロフォン22によって取得される受音信号が、前処理部10に入力されるようになっている。前処理部10では、音場補正が行われる。音場補正においては、音響空間である車室46の音響特性を考慮したチューニングが行われる。
マイクロフォン22によって取得される受音信号に音楽が含まれている場合には、前処理部10は、マイクロフォン22によって取得される受音信号から音楽を除去する。前処理部10には、参照用音楽信号(参照信号)が入力されるようになっている。前処理部10は、マイクロフォン22によって取得される受音信号に含まれている音楽を、参照用音楽信号を用いて除去する。
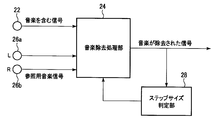
図5は、音楽の除去のアルゴリズムを示す概略図である。車載音響機器84によって音楽が再生されている際には、マイクロフォン22によって取得される受音信号には音楽が含まれる。マイクロフォン22によって取得される音楽を含む受音信号は、前処理部10内に設けられた音楽除去処理部24に入力されるようになっている。また、参照用音楽信号が、音楽除去処理部24に入力されるようになっている。参照用音楽信号は、例えば、車載音響機器84のスピーカ76から出力された音楽を、マイクロフォン26a、26bによって取得することにより得ることが可能である。また、スピーカ76によって音に変換される前の音楽ソース信号を、参照用音楽信号として、音楽除去処理部24に入力するようにしてもよい。
音楽除去処理部24からの出力信号は、前処理部10内に設けられたステップサイズ判定部28に入力されるようになっている。ステップサイズ判定部28は、音楽除去処理部24の出力信号のステップサイズの判定を行うものである。ステップサイズ判定部28によって判定されたステップサイズは、音楽除去処理部24にフィードバックされるようになっている。音楽除去処理部24は、参照用音楽信号を用い、ステップサイズ判定部28により判定されたステップサイズに基づき、周波数領域の正規化最小二乗法(NLMS:Normalized Least-Mean Square)のアルゴリズムによって、音楽を含む信号から音楽を除去する。車室46内における音楽の反響成分をも十分に除去すべく、十分な処理段数で音楽の除去の処理が行われる。
図6は、音楽の除去前と除去後の信号波形を示す図である。横軸は時間を示しており、縦軸は振幅を示している。グレーで示した信号は音楽の除去前を示しており、ブラックで示した信号は音楽の除去後を示している。図6から分かるように、音楽が確実に除去されている。
このようにして音楽が除去された信号が、前処理部10の音楽除去処理部24から出力され、処理部12に入力される。なお、前処理部10において音楽を十分に除去し得ない場合には、後処理部14においても、音楽の除去の処理を行うようにしてもよい。
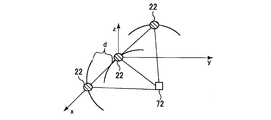
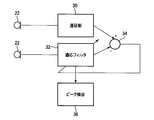
音声源方位判定部16では、音声源の方位の判定が行われる。図7は、音声源の方位の判定のアルゴリズムを示す図である。複数のマイクロフォン22のうちのあるマイクロフォン22からの信号が、音声源方位判定部16内に設けられた遅延部30に入力されるようになっている。複数のマイクロフォン22のうちの他のマイクロフォン22からの信号が、音声源方位判定部16内に設けられた適応フィルタ32に入力されるようになっている。遅延部30の出力信号と適応フィルタ32の出力信号とが、減算点34に入力されるようになっている。減算点34においては、遅延部30の出力信号から適応フィルタ34の出力信号が減算される。減算点34において減算処理が行われた信号に基づいて、適応フィルタ32が調整される。適応フィルタ32からの出力は、ピーク検出部36に入力されるようになっている。ピーク検出部36は、適応フィルタ係数のピーク(最大値)を検出するものである。適応フィルタ係数のピークに対応する到来時間差τが、目的音の到来方位に対応する到来時間差τである。従って、こうして求められた到来時間差τに基づいて、音声源72の方位、即ち、目的音の到来方位を判定することが可能となる。
音の速度をc[m/s]、マイクロフォン間の距離をd[m]、到来時間差をτ[秒]とすると、音声源72の方向θ[度]は、以下のような式(1)によって表される。なお、音速cは、340[m/s]程度である。
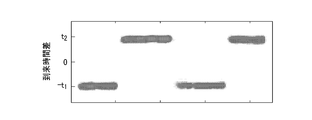
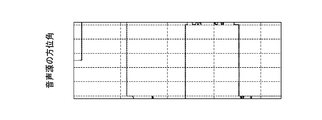
図8Aは、適応フィルタ係数を示す図である。図8Bは、音声源の方位角を示す図である。図8Cは、音声信号の振幅を示す図である。図8Aでは、適応フィルタ係数がピークとなる部分にハッチングを付している。図8Bは、到来時間差τに基づいて判定された音声源72の方位を示している。図8Cは、音声信号の振幅を示している。なお、図8A~図8Cは、運転者と助手席者とで交互に音声を発した場合を示している。ここでは、運転者が音声を発する場合の音声源72aの方位は、α1とした。助手席者が音声を発する場合の音声源72bの方位は、α2とした。
図8Aに示すように、適応フィルタ係数w(t,τ)のピークに基づいて、到来時間差τを検出することが可能である。運転者が音声を発した場合には、適応フィルタ係数のピークに対応する到来時間差τは、例えば-t1程度となる。そして、到来時間差τに基づいて音声源72aの方位角を判定すると、音声源72aの方位角は例えばα1程度と判定される。一方、助手席者が音声を発した場合には、適応フィルタ係数のピークに対応する到来時間差τは、例えばt2程度となる。そして、到来時間差τに基づいて音声源72bの方位角を判定すると、音声源72bの方位角は例えばα2度程度と判定される。なお、ここでは、α1の方位に運転者が位置しており、α2の方位に助手席者が位置している場合を例に説明したが、これに限定されるものではない。音声源72が近傍界に位置する場合であっても、音声源72が遠方界に位置する場合であっても、到来時間差τに基づいて、音声源72の位置を特定することが可能である。但し、音声源72が近傍界に位置する場合には、上述したように、マイクロフォン22が3個以上必要であるため、音声源72の方位を求めるための処理の負荷は重くなる。
音声源方位判定部16の出力信号、即ち、音声源72の方位を示す信号が、適応アルゴリズム決定部18に入力されるようになっている。適応アルゴリズム決定部18は、音声源72の方位に基づいて適応アルゴリズムを決定するものである。適応アルゴリズム決定部18によって決定された適応アルゴリズムを示す信号が、適応アルゴリズム決定部18から処理部12に入力されるようになっている。
処理部12は、適応的に指向性を形成する信号処理である適応ビームフォーミングを行うものである(適応ビームフォーマ)。ビームフォーマとしては、例えばFrostビームフォーマを用いることができる。なお、ビームフォーミングは、Frostビームフォーマに限定されるものではなく、様々なビームフォーマを適宜適用することができる。処理部12は、適応アルゴリズム決定部18によって決定された適応アルゴリズムに基づいて、ビームフォーミングを行う。本実施形態において、ビームフォーミングを行うのは、目的音の到来方位に対しての感度を確保しつつ、目的音の到来方向以外の感度を低下させるためである。目的音は、例えば運転者から発せられる音声である。運転者は運転席40に着座した状態で上半身を動かし得るため、音声源72aの位置は変化し得る。音声源72aの位置の変化に応じて、目的音の到来方位は変化する。良好な音声認識を行うためには、目的音の到来方向以外の感度を確実に低下させることが好ましい。そこで、本実施形態では、上記のようにして判定される音声源72の方位に基づいて、当該方位を含む方位範囲以外の方位範囲からの音声を抑圧すべく、ビームフォーマを順次更新する。
図9は、ビームフォーマの指向性を概念的に示す図である。図9は、音声認識の対象とすべき音声源72aが運転席40に位置している場合のビームフォーマの指向性を概念的に示している。図9におけるハッチングは、到来音が抑圧(抑制、低減)される方位範囲を示している。図9に示すように、運転席40の方位を含む方位範囲以外の方位範囲から到来する音が抑圧される。
なお、音声認識の対象とすべき音声源72bが助手席44に位置している場合には、助手席44の方位を含む方位範囲以外の方位範囲から到来する音が抑圧されるようにすればよい。
図10は、ビームフォーマのアルゴリズムを示す図である。マイクロフォン22a~22cによって取得される受音信号が、前処理部10(図2参照)を介して、処理部12内に設けられた窓関数/高速フーリエ変換処理部48a~48cにそれぞれ入力されるようになっている。窓関数/高速フーリエ変換処理部48a~48cは、窓関数処理及び高速フーリエ変換処理を行うものである。本実施形態において、窓関数処理及び高速フーリエ変換処理を行うのは、周波数領域での計算は時間領域での計算より速いためである。窓関数/高速フーリエ変換処理部48aの出力信号X1,kとビームフォーマの重みテンソルW1,k
*とが、乗算点50aにおいて乗算されるようになっている。窓関数/高速フーリエ変換処理部48bの出力信号X2,kとビームフォーマの重みテンソルW2,k
*とが、乗算点50bにおいて乗算されるようになっている。窓関数/高速フーリエ変換処理部48cの出力信号X3,kとビームフォーマの重みテンソルW3,k
*とが、乗算点50cにおいて乗算されるようになっている。乗算点50a~50cにおいてそれぞれ乗算処理された信号が、加算点52において加算されるようになっている。加算点52において加算処理された信号Ykは、処理部12内に設けられた逆高速フーリエ変換/重畳加算処理部54に入力されるようになっている。逆高速フーリエ変換/重畳加算処理部54は、逆高速フーリエ変換処理及び重畳加算(OLA:OverLap-Add)法による処理を行うものである。重畳加算法による処理を行うことにより、周波数領域の信号が時間領域の信号に戻される。逆高速フーリエ変換処理及び重畳加算法による処理が行われた信号が、逆高速フーリエ変換/重畳加算処理部54から後処理部14に入力されるようになっている。
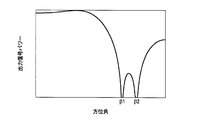
図11は、ビームフォーマにより得られた指向性(角度特性)を示す図である。横軸は方位角を示しており、縦軸は出力信号パワーを示している。図11から分かるように、例えば方位角β1と方位角β2とにおいて出力信号パワーが極小となる。方位角β1と方位角β2との間においても、十分な抑圧が行われている。図11に示すような指向性のビームフォーマを用いれば、助手席から到来する音を十分に抑圧することができる。一方、運転席から到来する音声は、殆ど抑圧されることなくマイクロフォン22に到達する。
本実施形態では、音声源72から到来する音声の大きさよりも、音声源72の方位を含む方位範囲以外の方位範囲から到来する音の方が大きい場合には、音声源72の方位の判定を中断する(音声源方位判定キャンセル処理)。例えば、運転者からの音声を取得するようにビームフォーマが設定されている場合において、運転者からの音声よりも助手席者からの音声の方が大きい場合には、音声源の方位の推定を中断する。この場合、マイクロフォン22によって取得される受音信号を十分に抑圧する。図12は、ビームフォーマと音声源方位判定キャンセル処理とを組み合わせた場合の指向性(角度特性)を示す図である。実線は、ビームフォーマの指向性を示している。一点鎖線は、音声源方位判定キャンセル処理の角度特性を示している。例えばγ1より小さい方位から到来する音声、又は、例えばγ2より大きい方位から到来する音声が、運転者からの音声よりも大きい場合には、音声源方位判定キャンセル処理が行われる。なお、ここでは、運転者からの音声を取得するようにビームフォーマが設定されている場合を例に説明したが、助手席者からの音声を取得するようにビームフォーマが設定されていてもよい。この場合には、助手席者からの音声よりも運転者からの音声の方が大きい場合には、音声源の方位の推定を中断する。
図13は、マイクロフォンが2個の場合におけるビームフォーマにより得られる指向性を示すグラフである。横軸は方位角であり、縦軸は出力信号パワーである。マイクロフォン22が2個であるため、極小値となる角度が1箇所のみである。図13から分かるように、例えば方位角β1においては著しい抑圧が可能であるが、音声源72の方位の変化に対するロバスト性はあまり高くない。
こうして、音声源72の方位を含む方位範囲以外の方位範囲から到来する音が抑圧された信号が、処理部12から出力される。処理部12からの出力信号は、後処理部14に入力されるようになっている。
後処理部(後処理適応フィルタ)14においては、ノイズの除去が行われる。かかるノイズとしては、例えばエンジンノイズ、ロードノイズ、風切り音等が挙げられる。図14は、ノイズの除去のアルゴリズムを示す図である。ノイズモデル決定部20内に設けられた基本波判定部56によって、ノイズの基本波が判定される。基本波判定部56は、ノイズの基本波に基づいた正弦波を出力する。基本波判定部56から出力される正弦波は、ノイズモデル決定部20内に設けられたモデリング処理部58に入力されるようになっている。モデリング処理部58は、非線形マッピング処理部60と、線形フィルタ62と、非線形マッピング処理部64とを有している。モデリング処理部58は、Hammerstein-Wiener非線形モデルによるモデリング処理を行うものである。モデリング処理部58には、非線形マッピング処理部60、線形フィルタ62及び非線形マッピング処理部64が設けられている。モデリング処理部58は、基本波判定部56から出力される正弦波に対してモデリング処理を行うことにより、参照用ノイズ信号を生成する。モデリング処理部58から出力される参照用ノイズ信号は、ノイズが含まれた信号からノイズを除去するための参照信号となる。参照用ノイズ信号は、後処理部14内に設けられたノイズ除去処理部66に入力されるようになっている。ノイズ除去処理部66には、処理部12からのノイズを含む信号も入力されるようになっている。ノイズ除去処理部66は、参照用ノイズ信号を用い、正規化最小二乗法のアルゴリズムによって、ノイズを含む信号からノイズを除去する。ノイズ除去処理部66からは、ノイズが除去された信号が出力される。
図15は、ノイズの除去前と除去後の信号波形を示す図である。横軸は時間を示しており、縦軸は振幅を示している。グレーで示した信号はノイズ除去前を示しており、ブラックで示した信号はノイズ除去後を示している。図15から分かるように、ノイズが確実に除去されている。
後処理部14においては、歪低減処理も行われる。なお、ノイズの除去は、後処理部14においてのみ行われるわけではない。マイクロフォン22を介して取得された音に対して、前処理部10、処理部12及び後処理部14において行われる一連の処理によって、ノイズの除去が行われる。
こうして、後処理部14によって後処理が行われた信号が、図示しない自動音声認識装置に音声出力として出力される。目的音以外の音が抑圧された良好な目的音が自動音声認識装置に入力されるため、自動音声認識装置は、音声認識の精度を向上することができる。自動音声認識装置による音声認識結果に基づいて、車両に搭載されている機器等に対しての操作が自動で行われる。
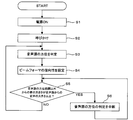
次に、本実施形態による音声処理装置の動作について図17を用いて説明する。図17は、本実施形態による音声処理装置の動作を示すフローチャートである。
まず、音声処理装置の電源がONにされる(ステップS1)。
次に、乗員による呼びかけが音声処理装置に対して行われる(ステップS2)。かかる呼びかけによって、音声処理が開始される。ここでは、例えば、運転者によって呼びかけが行われる場合を例に説明する。なお、呼びかけは、運転者が行わなくてもよい。例えば、助手席者が呼びかけを行ってもよい。また、呼びかけは、特定の言葉であってもよいし、単なる発声であってもよい。
次に、呼びかけを行った音声源72の方位が判定される(ステップS3)。音声源72の方位の判定は、上述したように、音声源方位判定部16等によって行われる。
次に、音声源72の方位に応じて、ビームフォーマの指向性を設定する(ステップS4)。ビームフォーマの指向性の設定は、上述したように、適応アルゴリズム決定部18、処理部12等によって行われる。
音声源72の方位を含む所定の方位範囲以外の方位範囲から到来する音の大きさが、音声源72から到来する音声の大きさ以上である場合には(ステップS5においてYES)、音声源72の判定を中断する(ステップS6)。
一方、音声源72の方位を含む所定の方位範囲以外の方位範囲から到来する音の大きさが、音声源72から到来する音声の大きさ以上でない場合には(ステップS5においてNO)、ステップS3、S4を繰り返し行う。
こうして、音声源72の位置の変化に応じて、ビームフォーマが適応的に設定され、目的音以外の音が確実に抑制される。
このように、本実施形態によれば、音声源72が近傍界に位置する場合には、音声を球面波として扱うため、音声源72が近傍界に位置する場合であっても、音声源72の方位を高精度に判定することができる。音声源72の方位を高精度に判定し得るため、本実施形態によれば、目的音以外の音を確実に抑制することができる。しかも、音声源72が遠方界に位置する場合には、音声を平面波として扱って音声源72の方位を判定するため、音声源72の方位を判定するための処理負荷を軽くすることができる。従って、本実施形態によれば、音声認識の確実性を向上し得る良好な音声処理装置を提供することができる。
また、本実施形態によれば、受音信号に含まれる音楽を除去する音楽除去処理部24が設けられているため、車載音響機器84から音楽が再生されている場合であっても、良好な音声認識を行うことが可能となる。
また、本実施形態によれば、受音信号に含まれるノイズを除去するノイズ除去処理部66が設けられているため、車両が走行中であっても、良好な音声認識を行うことが可能となる。
[変形実施形態]
上記実施形態に限らず種々の変形が可能である。
上記実施形態に限らず種々の変形が可能である。
例えば、上記実施形態では、マイクロフォン22の数が3個である場合を例に説明したが、マイクロフォン22の数は3個に限定されるものではなく、4個以上であってもよい。多くのマイクロフォン22を用いれば、音声源72の方位をより高精度に判定し得る。
また、上記実施形態では、本実施形態による音声処理装置の出力が自動音声認識装置に入力される場合、即ち、本実施形態による音声処理装置の出力が音声認識に用いられる場合を例に説明したが、これに限定されるものではない。本実施形態による音声処理装置の出力が、自動音声認識に用いられなくてもよい。例えば、本実施形態による音声処理装置を、電話での会話における音声処理に適用してもよい。具体的には、本実施形態による音声処理装置を用いて目的音以外の音を抑圧し、良好な音声を送信するようにしてもよい。本実施形態による音声処理装置を電話での会話に適用すれば、良好な音声での通話を実現することができる。
この出願は2014年12月26日に出願された日本国特許出願第2014-263918号からの優先権を主張するものであり、その内容を引用してこの出願の一部とするものである。
22,22a~22c…マイクロフォン
40…運転席
42…ダッシュボード
44…助手席
46…車体
72、72a、72b…音声源
76…スピーカ
78…ステアリングホイール
80…エンジン
82…外部ノイズ源
84…車載音響機器
40…運転席
42…ダッシュボード
44…助手席
46…車体
72、72a、72b…音声源
76…スピーカ
78…ステアリングホイール
80…エンジン
82…外部ノイズ源
84…車載音響機器
Claims (6)
- 車両に配された複数のマイクロフォンと、
前記複数のマイクロフォンの各々によって取得される受音信号に含まれる音声の発生源である音声源が近傍界に位置する場合には、前記受音信号を球面波として扱って前記音声源の方位を判定し、前記音声源が前記遠方界に位置する場合には、前記受音信号を平面波として扱って前記音声源の方位を判定する音声源方位判定部と、
前記音声源の前記方位を含む方位範囲以外の方位範囲から到来する音を抑圧するようにビームフォーミングを行うビームフォーミング処理部と
を有することを特徴とする音声処理装置。 - 前記複数のマイクロフォンの数は、2つである
ことを特徴とする請求項1記載の音声処理装置。 - 前記複数のマイクロフォンの数は、少なくとも3つであり、
前記複数のマイクロフォンのうちの第1のマイクロフォンと前記複数のマイクロフォンのうちの第2のマイクロフォンとの間の距離である第1の距離は、前記複数のマイクロフォンのうちの第3のマイクロフォンと前記第2のマイクロフォンとの間の距離である第2の距離とは異なる
ことを特徴とする請求項1記載の音声処理装置。 - 前記受音信号に混入された音楽信号を、音響機器から取得された参照用音楽信号を用いて除去する音楽除去処理部を更に有する
ことを特徴とする請求項1乃至3のいずれか1項に記載の音声処理装置。 - 前記音声源方位判定部は、前記第2の方位範囲内から前記マイクロフォンに到来した音が、前記第1の方位範囲内から前記マイクロフォンに到来した音よりも大きい場合には、前記音声源の前記方位の判定を中断する
ことを特徴とする請求項1乃至4のいずれか1項に記載の音声処理装置。 - 前記受音信号に混入されたノイズの除去処理を行うノイズ除去処理部を更に有する
ことを特徴とする請求項1乃至5のいずれか1項に記載の音声処理装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15872280.1A EP3240301A4 (en) | 2014-12-26 | 2015-12-24 | Voice processing device |
| US15/536,827 US20170352349A1 (en) | 2014-12-26 | 2015-12-24 | Voice processing device |
| CN201580071069.6A CN107113498A (zh) | 2014-12-26 | 2015-12-24 | 声音处理装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014263918A JP2016127300A (ja) | 2014-12-26 | 2014-12-26 | 音声処理装置 |
| JP2014-263918 | 2014-12-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016103709A1 true WO2016103709A1 (ja) | 2016-06-30 |
Family
ID=56149767
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/006446 Ceased WO2016103709A1 (ja) | 2014-12-26 | 2015-12-24 | 音声処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170352349A1 (ja) |
| EP (1) | EP3240301A4 (ja) |
| JP (1) | JP2016127300A (ja) |
| CN (1) | CN107113498A (ja) |
| WO (1) | WO2016103709A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10362392B2 (en) * | 2016-05-18 | 2019-07-23 | Georgia Tech Research Corporation | Aerial acoustic sensing, acoustic sensing payload and aerial vehicle including the same |
| KR102471499B1 (ko) * | 2016-07-05 | 2022-11-28 | 삼성전자주식회사 | 영상처리장치, 영상처리장치의 구동방법 및 컴퓨터 판독가능 기록매체 |
| CN106782585B (zh) * | 2017-01-26 | 2020-03-20 | 芋头科技(杭州)有限公司 | 一种基于麦克风阵列的拾音方法及系统 |
| US10825480B2 (en) * | 2017-05-31 | 2020-11-03 | Apple Inc. | Automatic processing of double-system recording |
| CN108597508B (zh) * | 2018-03-28 | 2021-01-22 | 京东方科技集团股份有限公司 | 用户识别方法、用户识别装置和电子设备 |
| DE102018206722A1 (de) * | 2018-05-02 | 2019-11-07 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben von Ultraschallsensoren eines Fahrzeugs |
| KR102900915B1 (ko) * | 2018-12-14 | 2025-12-17 | 삼성전자주식회사 | 음성을 인식하기 위한 방법 및 장치 |
| CN112071311B (zh) | 2019-06-10 | 2024-06-18 | Oppo广东移动通信有限公司 | 控制方法、控制装置、穿戴设备和存储介质 |
| CN110164443B (zh) * | 2019-06-28 | 2021-09-14 | 联想(北京)有限公司 | 用于电子设备的语音处理方法、装置以及电子设备 |
| KR102144382B1 (ko) * | 2019-10-23 | 2020-08-12 | (주)남경 | 음성 인식 기술을 이용한 차량용 헤드업 디스플레이 장치 |
| JP7365642B2 (ja) * | 2020-03-18 | 2023-10-20 | パナソニックIpマネジメント株式会社 | 音声処理システム、音声処理装置及び音声処理方法 |
| US11290814B1 (en) | 2020-12-15 | 2022-03-29 | Valeo North America, Inc. | Method, apparatus, and computer-readable storage medium for modulating an audio output of a microphone array |
| CN112803828B (zh) * | 2020-12-31 | 2023-09-01 | 上海艾为电子技术股份有限公司 | 一种马达控制方法、控制系统和控制芯片 |
| CN113709378A (zh) * | 2021-09-08 | 2021-11-26 | 联想(北京)有限公司 | 一种处理方法、装置、摄像设备及电子系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234790A (ja) * | 1998-02-18 | 1999-08-27 | Fujitsu Ltd | マイクロホンアレイ装置 |
| JP2000231399A (ja) * | 1999-02-10 | 2000-08-22 | Oki Electric Ind Co Ltd | 騒音低減装置 |
| JP2008092512A (ja) * | 2006-10-05 | 2008-04-17 | Casio Hitachi Mobile Communications Co Ltd | 音声入力装置 |
| JP2014011600A (ja) * | 2012-06-29 | 2014-01-20 | Audio Technica Corp | マイクロホン |
| JP2014178339A (ja) * | 2011-06-03 | 2014-09-25 | Nec Corp | 音声処理システム、発話者の音声取得方法、音声処理装置およびその制御方法と制御プログラム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7269096B2 (en) * | 2002-02-27 | 2007-09-11 | Her Majesty The Queen In Right Of Canada As Represented By The Minister Of National Defense | Identification and location of an object via passive acoustic detection |
| US8724829B2 (en) * | 2008-10-24 | 2014-05-13 | Qualcomm Incorporated | Systems, methods, apparatus, and computer-readable media for coherence detection |
| CN101478711B (zh) * | 2008-12-29 | 2013-07-31 | 无锡中星微电子有限公司 | 控制麦克风录音的方法、数字化音频信号处理方法及装置 |
| US8897455B2 (en) * | 2010-02-18 | 2014-11-25 | Qualcomm Incorporated | Microphone array subset selection for robust noise reduction |
| US9354310B2 (en) * | 2011-03-03 | 2016-05-31 | Qualcomm Incorporated | Systems, methods, apparatus, and computer-readable media for source localization using audible sound and ultrasound |
-
2014
- 2014-12-26 JP JP2014263918A patent/JP2016127300A/ja active Pending
-
2015
- 2015-12-24 US US15/536,827 patent/US20170352349A1/en not_active Abandoned
- 2015-12-24 EP EP15872280.1A patent/EP3240301A4/en not_active Withdrawn
- 2015-12-24 CN CN201580071069.6A patent/CN107113498A/zh active Pending
- 2015-12-24 WO PCT/JP2015/006446 patent/WO2016103709A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234790A (ja) * | 1998-02-18 | 1999-08-27 | Fujitsu Ltd | マイクロホンアレイ装置 |
| JP2000231399A (ja) * | 1999-02-10 | 2000-08-22 | Oki Electric Ind Co Ltd | 騒音低減装置 |
| JP2008092512A (ja) * | 2006-10-05 | 2008-04-17 | Casio Hitachi Mobile Communications Co Ltd | 音声入力装置 |
| JP2014178339A (ja) * | 2011-06-03 | 2014-09-25 | Nec Corp | 音声処理システム、発話者の音声取得方法、音声処理装置およびその制御方法と制御プログラム |
| JP2014011600A (ja) * | 2012-06-29 | 2014-01-20 | Audio Technica Corp | マイクロホン |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3240301A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107113498A (zh) | 2017-08-29 |
| EP3240301A4 (en) | 2017-12-27 |
| EP3240301A1 (en) | 2017-11-01 |
| US20170352349A1 (en) | 2017-12-07 |
| JP2016127300A (ja) | 2016-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016103709A1 (ja) | 音声処理装置 | |
| WO2016143340A1 (ja) | 音声処理装置及び制御装置 | |
| WO2016103710A1 (ja) | 音声処理装置 | |
| JP5913340B2 (ja) | マルチビーム音響システム | |
| US8112272B2 (en) | Sound source separation device, speech recognition device, mobile telephone, sound source separation method, and program | |
| CN106409280B (zh) | 用于改进语音识别性能的有源噪声消除设备和方法 | |
| US9002027B2 (en) | Space-time noise reduction system for use in a vehicle and method of forming same | |
| US9454952B2 (en) | Systems and methods for controlling noise in a vehicle | |
| JP4283212B2 (ja) | 雑音除去装置、雑音除去プログラム、及び雑音除去方法 | |
| US9959859B2 (en) | Active noise-control system with source-separated reference signal | |
| CN108235187B (zh) | 啸声抑制设备和啸声抑制方法 | |
| US20170150256A1 (en) | Audio enhancement | |
| CN111489750B (zh) | 声音处理设备和声音处理方法 | |
| US8165310B2 (en) | Dereverberation and feedback compensation system | |
| CN108091344A (zh) | 一种降噪方法、装置及系统 | |
| CN102750946A (zh) | 用于机动车辆的语音操纵装置以及用于选择话筒以运行语音操纵装置的方法 | |
| US20160119712A1 (en) | System and method for in cabin communication | |
| US8639499B2 (en) | Formant aided noise cancellation using multiple microphones | |
| JP2024026716A (ja) | 信号処理装置及び信号処理方法 | |
| US12039965B2 (en) | Audio processing system and audio processing device | |
| JP2009073417A (ja) | 騒音制御装置および方法 | |
| JP2007180896A (ja) | 音声信号処理装置および音声信号処理方法 | |
| GB2560498A (en) | System and method for noise cancellation | |
| JP5383008B2 (ja) | 音声明瞭度改善システム及び音声明瞭度改善方法 | |
| JP2020134566A (ja) | 音声処理システム、音声処理装置及び音声処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15872280 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15536827 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015872280 Country of ref document: EP |