WO2017203694A1 - 運転制御方法及び運転制御装置 - Google Patents
運転制御方法及び運転制御装置 Download PDFInfo
- Publication number
- WO2017203694A1 WO2017203694A1 PCT/JP2016/065737 JP2016065737W WO2017203694A1 WO 2017203694 A1 WO2017203694 A1 WO 2017203694A1 JP 2016065737 W JP2016065737 W JP 2016065737W WO 2017203694 A1 WO2017203694 A1 WO 2017203694A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- driving
- vehicle
- characteristic
- automatic
- occupant
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/082—Selecting or switching between different modes of propelling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/10—Interpretation of driver requests or demands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0872—Driver physiology
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W2040/0881—Seat occupation; Driver or passenger presence
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
- B60W2050/0083—Setting, resetting, calibration
- B60W2050/0088—Adaptive recalibration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/215—Selection or confirmation of options
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/221—Physiology, e.g. weight, heartbeat, health or special needs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/10—Historical data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18154—Approaching an intersection
Definitions
- the present invention relates to a driving control method and apparatus for setting driving characteristics to be applied to automatic driving in a vehicle capable of switching between manual driving and automatic driving.
- Patent Document 1 is disclosed as an operation control device that performs automatic driving in a state in which the driver feels uncomfortable.
- driving control device disclosed in Patent Document 1 driving operation by the driver is learned in association with the driving environment during manual driving, and automatic driving is executed with reference to the learning result.
- the driving characteristics learned during past manual driving may differ from the driving characteristics desired by the vehicle occupant on the current trip.
- the learning result of the past manual operation is reflected in the automatic operation. Therefore, the automatic operation is executed with the operation characteristic different from the operation characteristic desired by the vehicle occupant. There was a problem that it was.
- the present invention has been proposed in view of the above-described circumstances, and provides an operation control method and apparatus capable of executing automatic operation with desired operation characteristics on the current trip by a vehicle occupant. With the goal.
- a driving control method and apparatus are capable of switching between a manual driving for driving a vehicle and an automatic driving for automatically driving the vehicle by a driving operation of an occupant.
- the occupant's driving characteristics during manual driving on the current trip of the vehicle are compared with the reference driving characteristics stored in advance. If there is a predetermined discrepancy between the occupant's driving characteristics and the standard driving characteristics during manual operation on the current trip, apply to automatic driving according to the occupant's driving characteristics during manual operation on the current trip Set the operating characteristics.
- automatic driving can be executed with the driving characteristics desired by the vehicle occupant on the current trip.
- FIG. 1 is a block diagram showing a configuration of an operation control system including an operation control apparatus according to the first embodiment of the present invention.
- FIG. 2 is an example of a block diagram illustrating a specific hardware configuration of the operation control system including the operation control apparatus according to the first embodiment of the present invention.
- FIG. 3 is an example of a block diagram showing a specific hardware configuration of the operation control system including the operation control apparatus according to the first embodiment of the present invention.
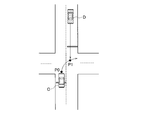
- FIG. 4 is a diagram for explaining the gap time when starting a right turn at an intersection.
- FIG. 5 is a diagram for explaining the gap time when entering an intersection at an intersection with a temporary stop restriction.
- FIG. 6 is a diagram for explaining the distance between the rear side vehicles between the own vehicle and the rear side vehicle.
- FIG. 1 is a block diagram showing a configuration of an operation control system including an operation control apparatus according to the first embodiment of the present invention.
- FIG. 2 is an example of a block diagram illustrating a specific hardware configuration of the operation control system including the operation control
- FIG. 7 is a diagram for explaining a lateral distance between the own vehicle and a parked vehicle.
- FIG. 8 is a flowchart showing a processing procedure of driving characteristic determination processing by the driving control apparatus according to the first embodiment of the present invention.
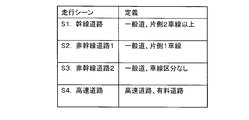
- FIG. 9 is a diagram for explaining a traveling scene classification method by the driving characteristic determination process according to the first embodiment of the present invention.
- FIG. 10 is a diagram for explaining a traveling state classification method by the driving characteristic determination process according to the first embodiment of the present invention.
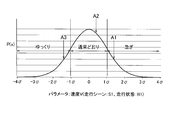
- FIG. 11 is a diagram for explaining a method of determining a divergence between the current trip driving characteristic and the reference driving characteristic by the driving characteristic determination process according to the first embodiment of the present invention.
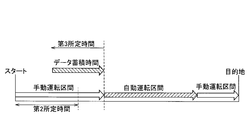
- FIG. 12 is a diagram for explaining a data acquisition method for determining driving characteristics by the driving characteristics determination process according to the first embodiment of the present invention.
- FIG. 13 is a diagram for explaining a driving characteristic determination method applied to automatic driving by the driving characteristic determination process according to the first embodiment of the present invention.
- FIG. 14 is a diagram for explaining a gap time setting method applied to automatic driving by the driving characteristic determination processing according to the first embodiment of the present invention.
- FIG. 15 is a flowchart showing a processing procedure of driving characteristic determination processing by the driving control apparatus according to the second embodiment of the present invention.
- FIG. 16 is a diagram for explaining a data acquisition method for determining driving characteristics by the driving characteristics determination process according to the second embodiment of the present invention.
- FIG. 17 is a flowchart showing a processing procedure of driving characteristic determination processing by the driving control apparatus according to the third embodiment of the present invention.
- FIG. 1 is a block diagram illustrating a configuration of an operation control system including an operation control device according to the present embodiment.
- 2 and 3 are examples of block diagrams showing a specific hardware configuration of the operation control system including the operation control apparatus according to the present embodiment.
- the operation control system 100 includes an operation control device 1, a traveling state detection unit 3, an ambient state detection unit 5, an operation changeover switch 7, and an operation characteristic adjustment unit 9. And a display 11. Further, the operation control system 100 is connected to a control state display module 13, an actuator control module 15, and an actuator 17 mounted on the vehicle.
- the operation control device 1 is a controller that executes an operation characteristic determination process for determining an operation characteristic to be applied to automatic driving in a vehicle that can be switched between manual driving and automatic driving.
- the driving control device 1 compares the driving characteristics of the occupant during manual driving on the current trip of the vehicle with reference driving characteristics stored in advance. If there is a predetermined discrepancy between the occupant's driving characteristics and the standard driving characteristics during manual operation on the current trip, automatic driving is performed according to the occupant's operating characteristics during manual operation on the current trip. Set the operating characteristics to be applied.
- the manual operation is an operation in which the vehicle is driven by an occupant's driving operation
- the automatic operation is an operation in which the vehicle is driven without the occupant's driving operation.
- the driving operation amount (accelerator amount, steering amount, etc.) of the occupant may be used directly as the driving characteristics of the occupant, or the driving characteristics may be obtained from the driving operation amount of the occupant.
- the driving characteristics of the occupant during manual driving the behavior of the vehicle (vehicle speed, acceleration, yaw rate, etc.) may be directly used as the driving characteristics of the occupant.
- the manual operation is a driving operation for all of the operation parts (for example, accelerator, brake, steering, constant speed vehicle speed setting operation part, wiper operation part, head lamp operation part) operated by the occupant to drive the vehicle.
- the operation control device 1 includes an information acquisition unit 21, an operation characteristic determination unit 23, a reference operation characteristic storage unit 25, an operation characteristic determination unit 27, and an automatic operation control execution unit 29, which are illustrated in FIG. It is mounted on the vehicle 50 as described above.
- a communication device 59 may be installed in the vehicle 50 and data may be accumulated in the server 61.
- the operation control device 1 may be installed in the server 61.
- the reference driving characteristic is set for each vehicle and does not need to be updated. For example, in the current trip, it is determined whether or not there is a predetermined difference between the driving characteristic and the reference driving characteristic in the current trip by comparing the data acquired in real time with the reference driving characteristic. be able to. However, by accumulating the acquired data and reflecting it in the standard driving characteristic, the standard driving characteristic as a determination standard is in line with the occupant. As a result, it is possible to determine whether the driving characteristics during manual driving on the current trip are normal driving characteristics or abnormal driving characteristics for the occupant.
- the traveling state detection unit 3 detects data indicating the traveling state of the vehicle 50 such as speed, steering angle, and acceleration, and is an in-vehicle network such as a CAN (Controller Area Network) 51 or a navigation device 53, for example.
- CAN Controller Area Network
- the traveling state detection unit 3 detects data indicating the traveling state of the vehicle 50 such as speed, steering angle, and acceleration, and is an in-vehicle network such as a CAN (Controller Area Network) 51 or a navigation device 53, for example.
- CAN Controller Area Network
- the surrounding situation detection unit 5 detects data representing the surrounding situation of the vehicle 50 such as the inter-vehicle distance from the preceding vehicle, the position of the parked vehicle, the distance to the intersection, and the like, for example, a camera 55 mounted on the vehicle. And a laser radar 57 and a navigation device 53.
- surrounding conditions may be detected using sonar, vehicle-to-vehicle communication, and road-to-vehicle communication.
- the operation changeover switch 7 is a switch that is mounted on the vehicle and is operated by a vehicle occupant to switch between automatic operation and manual operation.
- the driving characteristic adjustment unit 9 is an operation switch that receives an input from a vehicle occupant in order to adjust driving characteristics when mounted on the vehicle and in automatic driving. For example, an input for adjusting a vehicle speed or an inter-vehicle distance during automatic driving is received from a vehicle occupant.
- the driving characteristic adjustment unit 9 may always display the current setting state for each parameter of the driving characteristic in the meter, or may display it according to a request from the driver.
- the vehicle occupant can adjust each parameter before starting automatic driving or during automatic driving, and can also set it from a parameter setting menu.
- the driving characteristic adjustment unit 9 may be, for example, an operation button disposed on the steering wheel, an operation button disposed on the center console, a touch pad, or the like.
- the display 11 displays the control state of the operation characteristic determination process by the operation control device 1. For example, the driving characteristics during automatic driving such as the speed of the vehicle and the distance between the vehicles are presented to the driver. Further, when the driving characteristic is selected by the vehicle occupant when switching from manual driving to automatic driving, the selected driving characteristic is displayed.
- the display 11 may be a display screen of the navigation device 53 or a head-up display.
- the control state display module 13 detects a control state when the automatic operation is being executed from the operation control device 1 and executes a process for displaying on the display 11.
- the actuator control module 15 acquires a control output of automatic driving from the driving control device 1 and executes processing for driving various actuators 17 mounted on the vehicle.
- the actuator 17 is a driving means installed to drive each part of the vehicle 50 such as an accelerator, a brake, and a steering.
- the information acquisition unit 21 acquires data related to the traveling state of the vehicle 50 detected by the traveling state detection unit 3 and data related to the surrounding state of the vehicle 50 detected by the surrounding state detection unit 5. Specifically, the information acquisition unit 21 acquires data such as speed, brake timing, and acceleration as the traveling state of the vehicle 50. In addition, as the surroundings of the vehicle 50, the distance between the preceding vehicle, the inter-vehicle time and the relative speed, the gap time between the oncoming vehicle or the crossing vehicle, the lateral distance between the parked and stopped vehicles, the rear side The distance between the rear side vehicles and the time between the rear side vehicles is acquired.
- the driving characteristic determination unit 23 accumulates manual driving data in the current trip of the vehicle using the data acquired by the information acquisition unit 21 and determines the driving characteristic of the current trip. At this time, the driving characteristic determination unit 23 does not use data stored within the fourth predetermined time immediately after the vehicle starts traveling, for example, after starting traveling. Immediately after the vehicle starts traveling, the driving characteristics are not stable, so data after the driving characteristics are stabilized is used. For example, when driving is started, it may be possible to start from a position away from the main road such as home or office. Your home or company may be in a densely populated area, where the road is narrow and there are many intersections.
- the fourth predetermined time is set to a time until the driving characteristics of the vehicle are stabilized.
- the data may be accumulated after the fourth predetermined time has elapsed since the start of traveling, or the data accumulated after the start of traveling is deleted before the fourth predetermined time has elapsed. May be.
- the manual driving data accumulated to determine the driving characteristics of the current trip includes vehicle speed, vehicle-to-vehicle distance, vehicle-to-vehicle time or relative speed, vehicle brake timing, vehicle acceleration. At least one of them. Furthermore, the gap time between the vehicle and the oncoming vehicle or the crossing vehicle, the distance between the rear side vehicle or the rear side vehicle between the vehicle and the rear side vehicle, the side distance between the vehicle and the parked vehicle May be included.
- the gap time is the time difference from the oncoming straight vehicle when starting a right turn at the intersection, or the time difference from the intersection vehicle when entering the intersection at an intersection with a temporary stop restriction.
- the gap time when starting a right turn at an intersection will be described with reference to FIG.
- the right turn start point is P0
- the point where the host vehicle C and the opposite straight vehicle D cross each other is P1.
- the predicted arrival time from the travel position of the opposite straight vehicle D to P1 when the host vehicle C reaches P0 is the gap time with the opposite straight vehicle.
- the gap time when entering the intersection at the intersection with temporary stop restriction will be described.
- the intersection entry start point of the own vehicle C is P0
- the points where the own vehicle C and the intersection vehicle E cross each other are P2 and P3.
- the predicted arrival time from the travel position of the crossing vehicle E to P2 and P3 when the host vehicle C reaches P0 is the gap time with the crossing vehicle.
- the distance between the rear side vehicles between the own vehicle and the rear side vehicle will be described with reference to FIG.
- the main road traveling vehicle F1 becomes the rear side vehicle
- the rear side inter-vehicle distance becomes L1.
- the traveling vehicle F2 in the changed lane becomes a rear side vehicle
- the distance between the rear side vehicles becomes L2.
- the vehicle C passes by the side of the parked vehicle F3 on a single road, the distance between the vehicle C and the parked vehicle G becomes the side distance L3 as shown in FIG.
- the occupant's operation history input via the driving characteristic adjusting unit 9 for adjusting the driving characteristics is also accumulated for each driving scene and driving state as data for determining the driving characteristics of the current trip.
- the parameters for automatic driving are set for each driver based on past driving characteristics and current driving characteristics, but traveling during automatic driving may not always be as intended by the driver. In such a case, for example, when driving in a driving scene that was not experienced in past driving, or when the driver's state changes during automatic driving, the mode expected by the driver during automatic driving is This is the case. For example, when there is no need to rush or when there is a need to rush.
- the reference operation characteristic storage unit 25 generates reference operation characteristics for application to automatic operation and stores them in advance. For example, the reference driving characteristic storage unit 25 accumulates manual driving data in the past trip of the vehicle, and sets the reference driving characteristic based on the accumulated data. The data stored to generate the reference driving characteristics is similar to the data stored to determine the driving characteristics of the current trip. The reference driving characteristic is generated and stored for each parameter such as speed and acceleration for each driving scene and driving state. The reference operation characteristic storage unit 25 may set the reference operation characteristic by learning the accumulated data, and may set the reference operation characteristic by a weighted average in which the weight of the data closer to the date is increased. Further, the reference driving characteristic may be set in association with the position information and the driving environment.
- a reference driving characteristic is generated at each point on the map.
- standard driving characteristic according to the road condition of each point is generable.
- a parameter such as speed can be set higher.
- the driving characteristic determination unit 27 compares the driving characteristic of the current trip with the reference driving characteristic, and when a predetermined deviation occurs between the driving characteristic of the current trip and the reference driving characteristic, Set the driving characteristics to be applied to automatic driving according to the driving characteristics. For example, when the driver is usually traveling alone, the speed and acceleration are relatively high. However, in this trip, there are elderly people and infants traveling together, so there are cases where it is desirable to travel at a relatively low speed and acceleration. In such a case, the driving characteristics of the occupant during manual driving in this trip, that is, the vehicle speed and acceleration tend to be low. Eventually, there will be a discrepancy between the driving characteristics of the occupant and the standard driving characteristics during manual driving on the current trip.
- the automatic operation desired by the driver can be executed by executing the automatic operation according to the driving characteristics of the current trip.
- the driving characteristic determination unit 27 may set the driving characteristic of the current trip as it is as the driving characteristic of the automatic driving, or set the driving characteristic close to the driving characteristic of the current trip as the driving characteristic of the automatic driving. May be. Further, when the driving characteristic adjusting unit 9 is operated by a vehicle occupant, the operation is received and the driving characteristic applied to the automatic driving is adjusted.
- the automatic driving control execution unit 29 determines the behavior of the vehicle during traveling according to the surrounding situation recognized by the information acquisition unit 21 in the traveling route set by inputting the destination by the vehicle occupant.
- the automatic driving control execution unit 29 executes vehicle control based on the determined behavior of the vehicle. That is, in the vehicle, automatic driving control is executed by setting a destination, generating a route, determining an action from a result of surrounding recognition, and controlling based on the determined action. Note that after the behavior of the vehicle is determined, a target locus of the vehicle may be set and the vehicle may be controlled along the target locus.
- the driving characteristics during manual driving in the current trip may be used as an index for determining the behavior of the vehicle.
- the driving characteristics during manual driving in the current trip may be used when executing control of the vehicle.
- driving characteristics may be reflected in the target value, upper limit value, and gain, or may be reflected in a filter variable.
- the automatic driving control execution unit 29 executes the automatic driving when the automatic driving section is entered or when the vehicle occupant selects the automatic driving. At this time, the automatic operation control execution unit 29 executes automatic operation with the operation characteristics set by the operation characteristic determination unit 27.
- the driving characteristics may be adjusted according to the presence or absence of the passengers of the vehicle and the attributes of the passengers, or the driving characteristics according to the driver's physical condition and the desired arrival time input by the vehicle occupant. May be adjusted.
- the operation control device 1 includes a general-purpose electronic circuit including a microcomputer, a microprocessor, and a CPU, and peripheral devices such as a memory. Then, by executing a specific program, it operates as the information acquisition unit 21, the driving characteristic determination unit 23, the reference driving characteristic storage unit 25, the driving characteristic determination unit 27, and the automatic driving control execution unit 29 described above.
- Each function of the operation control apparatus 1 can be implemented by one or a plurality of processing circuits.
- the processing circuit includes a programmed processing device such as, for example, a processing device including an electrical circuit, and an application specific integrated circuit (ASIC) or conventional circuit arranged to perform the functions described in the embodiments. It also includes devices such as parts.
- ASIC application specific integrated circuit
- the driving characteristic determination process shown in FIG. 8 starts when the ignition of the vehicle is turned on and the current trip starts.
- the trip is a run from when the ignition of the vehicle is turned on until it is turned off, but if the ignition is turned off on the way to the destination, the trip from the departure point to the destination may be a single trip. .
- step S101 the information acquisition unit 21 acquires information from the navigation device 53, and determines whether or not a vehicle occupant inputs a destination and a vehicle travel route is set. .
- the process proceeds to step S103, and when the travel route is not set, the process proceeds to step S105.
- step S103 the automatic driving control execution unit 29 detects a section where automatic driving is possible on the set travel route, and sets an automatic driving section.
- the automatic driving section is set based on the destination and map information set by the driver, and is, for example, a main road, a highway, a road with one or more lanes on one side, a road having a track record of automatic driving in the past, and the like.
- step S105 the automatic operation control execution unit 29 determines whether or not to execute automatic operation.
- the automatic driving control execution unit 29 determines execution of automatic driving and performs step The process proceeds to S129.
- execution of manual operation is determined and the process proceeds to step S107.
- step S107 the automatic operation control execution unit 29 sets manual operation without executing automatic operation.
- the vehicle starts to be driven manually by the vehicle driver.
- the driving characteristic determination unit 23 classifies a traveling scene (traveling environment) in which the vehicle is currently traveling. For example, the driving characteristic determination unit 23 converts the driving scene into four road types S1 to S4 as shown in FIG. 9 from the road map information from the navigation device 53 and the information obtained by analyzing the image of the camera 55. Classify.
- the traveling scene S1 is a road type of a main road, and is classified when a vehicle is traveling on a general road having two or more lanes on one side.
- the travel scene S2 is classified when the road type of the non-main road 1 is traveling on a one-lane general road
- the travel scene S3 is the road type of the non-main road 2 and travels on a general road without lane classification.
- the traveling scene S4 is classified when the vehicle is traveling on an expressway or a toll road according to the type of expressway.
- ordinary roads are classified by the number of lanes, but may be classified by lane width.
- the driving characteristic determination unit 23 classifies the traveling state in which the vehicle is currently traveling. For example, the driving characteristic determination unit 23 classifies into six driving states B1 to B6 as shown in FIG. 10 based on information such as presence / absence of a preceding vehicle, brake on / off, acceleration, and the like. As shown in FIG. 10, the traveling state B1 is a traveling state in which the vehicle is cruising, and is classified when the brake is turned off without a preceding vehicle and the acceleration is less than 0.05G.
- the traveling state B2 is a traveling state in which the vehicle is following, and is classified when the preceding vehicle is present, the brake is turned off, and the acceleration is less than 0.05G.
- the traveling state B3 is a traveling state of deceleration 1, and is classified when there is no preceding vehicle and the brake is turned on.
- the traveling state B4 is a traveling state of the deceleration 2 and is classified when there is a preceding vehicle and the brake is turned on.
- the traveling state B5 is a traveling state of acceleration 1, and is classified when there is no preceding vehicle, the brake is turned off, and the acceleration is 0.05G or more.
- the traveling state B6 is a traveling state of acceleration 2, and is classified when the preceding vehicle is present and the brake is turned off and the acceleration is 0.05G or more. Instead of acceleration, whether or not the accelerator opening is 20% or more may be used as a threshold value.
- the driving characteristic determination unit 23 records the designated parameters for each traveling scene classified in step S109 and each traveling state classified in step S111. For example, when the vehicle is traveling on an expressway and the traveling state is following, the traveling scene is recorded as S4, the traveling state is recorded as B2, and the inter-vehicle time is recorded as a parameter of the traveling state B2 as shown in FIG. Is done. In other cases, the speed is recorded as shown in FIG. 10 when the driving state is B1 cruise, and when the driving state is the deceleration 1 of B3, the TTI (Time To Intersection) at braking is stopped. Time to line) is recorded.
- TTI Time To Intersection
- B6 acceleration 1 and acceleration 2 acceleration is recorded. Is recorded as a parameter.
- the recording cycle for recording each parameter is as shown in FIG.
- step S115 the automatic driving control execution unit 29 determines whether or not the vehicle has traveled and has approached the automatic driving section. If it is not approaching the automatic operation section, the process returns to step S109 to continue the manual operation to accumulate data, and if it is close to the automatic operation section, the process proceeds to step S117.
- step S117 the driving characteristic determination unit 23 determines whether or not the number of data of each parameter is accumulated up to the specified minimum number of data for each driving scene and driving state. For example, as shown in FIG. 10, in the case of the running state B1, it is determined whether or not 100 or more, which is the minimum number of speed data as parameters, can be accumulated. However, immediately after the vehicle starts traveling, for example, data accumulated within the fourth predetermined time after the traveling is started may not be used. If at least one parameter has been accumulated up to the minimum number of data in at least one driving scene and driving state, the process proceeds to step S119. On the other hand, if all parameters have not been accumulated up to the minimum number of data in all driving scenes and driving states, the process proceeds to step S127.
- the driving characteristic determination unit 23 reads the reference driving characteristic stored in advance in the reference driving characteristic storage unit 25. Specifically, the driving characteristic determination unit 23 reads the average value and standard deviation of the reference driving characteristic for each driving scene and driving state.
- the reference driving characteristic is represented by a probability distribution as shown in FIG. 11, and is generated and stored for each driving scene and driving state for each parameter. For example, FIG. 11 shows reference driving characteristics when the driving scene is the main road of S1, the cruise is B1 and the parameter is the speed V.
- step S121 the driving characteristic determination unit 23 calculates the statistical value of the driving characteristic of the current trip using the data accumulated in the current trip.
- the number of data used at this time only the number of data shown in FIG. 10 is used. For example, when the running state is B1, a maximum of 10,000 pieces of data are used.
- the driving characteristic determination unit 23 calculates an average value and a standard deviation for each parameter for each driving scene and driving state of the current trip, and shows how much the calculated average value deviates from the average value of the reference driving characteristic. Find the position. For example, as shown in FIG. 11, when the average value of the current trip is A1, the distribution position of the current trip can be determined to be the position of + 1.5 ⁇ of the reference operation characteristic.
- the distribution position of the current trip is determined to be + 0.5 ⁇
- the distribution position of the current trip is determined to be ⁇ 1.5 ⁇ .
- the driving characteristic determination unit 23 thus obtains the distribution position for each parameter for each driving scene and driving state.
- the distribution position is obtained for the parameter for which the minimum number of data is accumulated, and the parameter that has not been accumulated to the minimum number is determined according to the obtained distribution position.
- Set the distribution position For example, if the data for the speed parameter is accumulated and the distribution position is + 1.5 ⁇ , the distribution position is set to + 1.5 ⁇ even if the data for the inter-vehicle time parameter is not accumulated to the minimum number. To do. This is possible because of the correlation between the parameters. For example, when driving in a hurry, there is a correlation that the speed is higher than normal, the inter-vehicle time during tracking is shorter than normal, and the acceleration is higher.
- the distribution position can be set by the correlation even for the parameter for which data is not accumulated.
- an average value of the distribution positions may be obtained and applied to the parameters for which data is not accumulated. For example, when the distribution position is + 1.4 ⁇ , + 1 ⁇ , + 0.8 ⁇ , + 1.2 ⁇ for a plurality of parameters, the average value may be set to + 1.1 ⁇ . In this way, the statistical value of the current trip can be set even if the minimum number of data is not accumulated for all the driving scenes and driving states of all the parameters.
- the driving characteristic determination unit 23 stores the data accumulated within the third predetermined time before the time point when switching to the automatic operation. May be used. For example, as shown in FIG. 12, when the manual operation has been executed for a sufficiently long time to accumulate data, the data within the third predetermined time before the time point when switching to the automatic operation is used, Determine the operating characteristics of manual operation during the current trip. Thereby, the data immediately before switching to automatic operation can be used. Therefore, the second predetermined time is set to a time during which sufficient data can be accumulated to determine the driving characteristics of manual driving. In addition, the third predetermined time is set to a time that can secure the number of data necessary for determining the driving characteristics of the manual operation, and is shorter than the second predetermined time.
- step S123 the driving characteristic determination unit 27 compares the driving characteristic of the current trip with the reference driving characteristic, and determines whether or not a predetermined deviation occurs between the driving characteristic of the current trip and the reference driving characteristic. Determine. Specifically, the driving characteristic determination unit 27 compares the statistical value of the current trip with the statistical value of the reference driving characteristic. For example, when the current trip distribution position is greater than or equal to ⁇ 1 ⁇ of the reference driving characteristic, it is determined that a predetermined deviation has occurred, and when it is less than ⁇ 1 ⁇ , it is determined that the predetermined deviation has not occurred. . Therefore, in FIG.
- step S125 when the average value of the current trip is A1 and A3, it is determined that a divergence has occurred, and in the case of A2, it is determined that no divergence has occurred. If there is a predetermined divergence between the current trip operation characteristic and the reference operation characteristic, the process proceeds to step S125, and a predetermined divergence occurs between the current trip operation characteristic and the reference operation characteristic. If not, the process proceeds to step S127.
- the driving characteristic determination unit 27 sets driving characteristics to be applied to automatic driving according to the driving characteristics of the current trip.
- the driving characteristic applied to the automatic driving is set within a predetermined range of the standard driving characteristic. For example, as shown in FIG. 13, when the parameter is speed, the upper limit value MAX is set to + 1 ⁇ and the lower limit value MIN is set to ⁇ 2 ⁇ , and the range between the upper limit value MAX and the lower limit value MIN is automatically set.
- the driving characteristics applied to the driving are set. Therefore, when the driving characteristic of the current trip is X1, the driving characteristic of the automatic driving is determined so that the average value of X1 becomes the upper limit value MAX. In an automatic operation, if an extremely rushing operation exceeding + 1 ⁇ is performed, the safety is lowered.
- the operation characteristic is set to + 1 ⁇ or less, which is slightly hurry than usual.
- the driving characteristic of the current trip is X2
- the driving characteristic of the automatic driving is determined so that the average value of X2 becomes the lower limit value MIN. If you drive extremely slowly, such as -2 ⁇ or less in automatic driving, there is a risk of hindering the flow of traffic. Secure the flow. If the average value of the driving characteristics of the current trip is not less than ⁇ 2 ⁇ and less than ⁇ 1 ⁇ , the driving characteristics of the current trip may be applied to the automatic driving as it is. The reason why the range is set wider on the lower limit value MIN side than on the upper limit value MAX side is in consideration of safety.
- the driving characteristic setting method shown in FIG. 13 can also be applied when the parameter is an inter-vehicle distance, acceleration, brake timing, or the like.
- FIG. 14 is a diagram illustrating an example in which the gap time for each determination at the time of turning right at the intersection is accumulated.
- Tga the gap time when the driver performs a right turn as Tga
- Tgr the gap time when the driver stops the right turn as Tgr
- the gap time at which the cumulative frequency of the gap time Tga at the time of right turn execution and the gap time Tgr at the time of right turn stop is the same number (50% execution, 50% stop) is the critical gap Y, which is about 6 seconds in FIG.
- the lower limit value of the gap time at the time of right turn execution of the driving characteristics applied to automatic driving is determined. For example, if the lower limit of the gap time is set to 6 seconds, which is the critical gap, the driver always gets a sense of security because the driver always turns right after the gap time when the driver normally makes a right turn. Therefore, when it is determined that the current trip is an operation that is faster than usual, the lower limit value of the gap time at the time of the right turn of the automatic operation is slightly lowered from the critical gap. For example, it is set to a position (about 5 seconds in FIG. 14) where the right turn execution is 40% and the right turn stop is 60%. Thus, during a rush driving, the driver's time urgency can be reduced by lowering the lower limit value of the gap time.
- the lower limit value of the gap time at the time of the right turn of the automatic operation is slightly raised from the critical gap. For example, it is set to a position (about 7 seconds in FIG. 14) where the right turn execution is 60% and the right turn stop is 40%.
- the driver can feel a sense of time by increasing the lower limit of the gap time.
- the driving characteristics are set in the same manner as the gap time. be able to.
- the distance between the rear side vehicles will be described as an example.
- the rear side inter-vehicle distance data is accumulated, and the lower limit value of the rear side inter-vehicle distance is set based on the accumulated data, as in the case of the gap time.
- the lower limit value of the rear side inter-vehicle distance is reduced when the automatic operation merges or the lane change is executed. As a result, the driver's time urgency can be reduced.
- the lower limit value of the rear side inter-vehicle distance at the time of the merge or the lane change is increased.
- the driver can feel a sense of time.
- the same setting can be made for other parameters.
- step S127 the operation characteristic determination unit 27 sets the reference operation characteristic as an operation characteristic to be applied to automatic operation.
- the driving characteristic of the current trip is less than ⁇ 1 ⁇ , the driver is considered to be in a normal state that does not change as usual, and therefore the reference driving characteristic is applied to the automatic driving.
- step S129 the automatic driving control execution unit 29 determines the behavior of the vehicle during traveling based on the surrounding situation recognized by the information acquisition unit 21, and executes the automatic driving with the driving characteristics determined in step S125 or step S127. .
- the driving characteristics may be adjusted according to the presence or absence of a passenger of the vehicle and the attributes of the passenger.
- the presence or absence of a passenger is detected by a pressure sensor provided on the seat, a camera or sonar provided in the vehicle.
- passenger attributes there are elderly people, children, women, and the like, which are specified by a weight detected by a sensor provided on a seat or a camera or sonar provided in a vehicle.
- the driver may input the presence / absence or attribute of a passenger, or may specify the presence / absence or attribute of a passenger from a communication device such as a smartphone.
- the automatic driving control execution unit 29 adjusts driving characteristics so that the vehicle speed is low, the inter-vehicle distance is long, the acceleration is low, and the brake timing is quick.
- driving characteristics may be adjusted according to the physical condition of the driver.
- the driver's physical state includes a degree of arousal and fatigue, and the eye open / closed state is detected from the driver's face image taken by the camera, and the degree of arousal is determined based on the closed eye rate per unit time.
- the fatigue level may be determined from a wristwatch type or fingertip wearing type pulse wave meter.
- the automatic driving control execution unit 29 adjusts the driving characteristics such that the lower the arousal level or the higher the fatigue level, the lower the vehicle speed, the longer the inter-vehicle distance, the lower the acceleration, and the faster the brake timing.
- the driving characteristics may be adjusted according to the desired arrival time to the destination input by the vehicle occupant.
- the desired arrival time is input, for example, reaching the destination after 30 minutes or reaching the destination by 14:00.
- the automatic operation control execution unit 29 checks whether it has moved to the same route and the same destination in the past. Check if the crew member has specified the desired arrival time.
- the desired arrival time is specified in the past, it is detected whether the current desired arrival time is earlier or later than the past desired arrival time, and the driving characteristics are adjusted. For example, if the current desired arrival time is earlier than the past desired arrival time, the driving characteristics are adjusted so that the upper limit value of the average vehicle speed and acceleration is increased. On the other hand, if the current desired arrival time is later than the past desired arrival time, the driving characteristics are adjusted so that the upper limit values of the average vehicle speed and acceleration are lowered.
- step S131 the automatic driving control execution unit 29 determines whether or not the vehicle has reached the destination. If the vehicle has not reached the destination, the process proceeds to step S133. If the vehicle has reached the destination, the driving characteristic determination process according to the present embodiment is terminated.
- step S133 the reference operation characteristic storage unit 25 updates and stores the reference operation characteristic by reflecting the data of manual operation in the current trip. And it returns to step S105 and performs the driving
- the driving control method and the apparatus compare the driving characteristics of the occupant and the standard driving characteristics during manual driving on the current trip of the vehicle. If there is a predetermined discrepancy between the occupant's driving characteristics and the standard driving characteristics during manual operation on the current trip, automatic driving is performed according to the occupant's operating characteristics during manual operation on the current trip. Set the operating characteristics to be applied. As a result, when the vehicle occupant performs a manual operation different from the usual during the current trip, the occupant's driving characteristics during the current trip have priority over the occupant's operating characteristics during the past manual operation. Can be reflected in automatic operation. Therefore, automatic driving can be performed with the driving characteristics desired by the vehicle occupant on the current trip.
- data at the time of manual operation in the past trip of the vehicle is accumulated, and the reference operation characteristic is set based on the accumulated data.
- the driving characteristic close to the manual driving that is normally performed by the vehicle occupant can be set as the reference driving characteristic. Therefore, when a deviation from the reference driving characteristic occurs, it can be determined that the occupant desires a driving characteristic that is different from the usual driving characteristic, so that the occupant's intention can be accurately determined.
- the operation characteristics selected by the vehicle occupant are displayed on the vehicle display. Therefore, since the driving characteristic selected when switching from manual driving to automatic driving can be confirmed, it is possible to enhance the sense of security of the vehicle occupant.
- the third predetermined before the time point when the automatic operation is switched to The driving characteristics are determined using the data accumulated within the time.
- running characteristic of the present trip can be determined using the data immediately before switching to automatic driving
- the operation characteristics may be different between the first half and the second half of the manual operation. Therefore, by determining the driving characteristics using data immediately before switching to the automatic driving, it is possible to suppress a change in the driving characteristics and realize a smooth switching to the automatic driving.
- the driving control method and the device when the driving characteristics of the current trip are determined, the data accumulated within the fourth predetermined time after the vehicle starts running is not used. As a result, the data during the time when the driving characteristics immediately after the start of running are not stable can be excluded, so that the driving characteristics of the current trip can be accurately determined. In particular, since the driving characteristic immediately after the start of traveling hardly causes a deviation from the reference driving characteristic, the deviation from the reference driving characteristic can be easily specified by using data after the fourth predetermined time has elapsed.
- the driving characteristics applied to the automatic driving are adjusted according to at least one of the presence / absence of the passenger of the vehicle and the attributes of the passenger.
- operation corresponding to a passenger can be provided.
- the driving characteristics applied to the automatic driving are adjusted according to the desired arrival time to the destination desired by the vehicle occupant.
- running which can satisfy the hope by the passenger
- the driving characteristics applied to the automatic driving are adjusted according to the physical condition of the driver of the vehicle. Therefore, it is possible to provide driving characteristics of automatic driving corresponding to the physical condition of the driver of the vehicle.
- data at the time of manual operation of the vehicle is stored in a server outside the vehicle. This eliminates the need to store data in the vehicle, thereby reducing the capacity of the storage device installed in the vehicle.
- the operation characteristics applied to the automatic operation are set within a predetermined range of the reference operation characteristics.
- the driving characteristics of the automatic driving can be prevented from becoming extreme driving characteristics, and a sense of security can be given to the vehicle occupant.
- data on the vehicle speed, the inter-vehicle distance between the vehicle and the preceding vehicle, the inter-vehicle time or relative speed, the vehicle brake timing, and the vehicle acceleration data are accumulated. Also, the gap time between the vehicle and the oncoming vehicle or the crossing vehicle, the distance between the rear side vehicle or the rear side vehicle between the vehicle and the rear side vehicle, the side distance between the vehicle and the parked vehicle Accumulate data. Thereby, the driving characteristics of the current trip can be determined in various driving scenes and driving conditions.
- a request from a vehicle occupant is received by a switch operation, and operation characteristics applied to automatic operation are adjusted. Thereby, it is possible to adjust to the driving characteristics of the automatic driving desired by the vehicle occupant.
- the operation history of the switch operation by the vehicle occupant is accumulated as data for determining the driving characteristics of the current trip.
- requirement can be reflected when determining the driving
- step S201 is different from the driving characteristic determination process of the first embodiment shown in FIG. Note that the configuration of the operation control system and the processes other than step S201 are the same as those in the first embodiment, and thus detailed description thereof is omitted.
- step S201 the automatic operation control execution unit 29 determines whether or not the time during which the manual operation in the current trip is executed is within the first predetermined time. If the time during which the manual operation is performed is too short, sufficient data cannot be accumulated to determine the operation characteristics of the manual operation. Therefore, it is determined whether or not the time during which the manual operation is performed is within the first predetermined time, and it is determined whether or not data necessary for determining the operation characteristics of the manual operation is accumulated. Therefore, the first predetermined time is set to a time during which data for determining the operation characteristics of the manual operation cannot be sufficiently accumulated.
- step S117 If the time during which the manual operation is performed exceeds the first predetermined time, the process proceeds to step S117, and if it is within the first predetermined time, the process proceeds to step S127. That is, when the time for executing the manual operation is short and sufficient data for judging the operation characteristic of the manual operation cannot be accumulated, the process proceeds to step S127 and the reference operation characteristic is changed to the operation characteristic of the automatic operation.
- the start of the automatic operation may be delayed until the first predetermined time elapses.
- the start of the automatic operation is delayed until the first predetermined time elapses, and the manual operation section is extended. Reserve time to accumulate data. At this time, a message such as “Do you want to continue manual driving a little more?” May be sent to control the vehicle so as to obtain permission from the vehicle occupant.
- step S301 when it is determined that the time during which the manual operation in the current trip is executed is within the first predetermined time, in step S301, the automatic operation control execution unit 29 performs the reference operation for the vehicle occupant. Lets you choose whether to apply the characteristic. For example, the vehicle occupant selects whether to apply the driving characteristics of the current trip by applying a message or to apply the driving characteristics of the past trip. If the current trip operation characteristic is selected without selecting the reference operation characteristic, the process proceeds to step S117. If the reference operation characteristic is selected, the process proceeds to step S127. After that, when switching to automatic driving, the selected driving characteristics are displayed on the display 11.
- the period during which automatic driving is executed is set, but the period during which automatic driving is executed is not set, and when an occupant requests to start automatic driving. Can also be applied. If the period for which automatic operation is executed is not set and the occupant requests to start automatic operation, whether it is the operation characteristic in the current trip or the reference operation characteristic when starting automatic operation Which driving characteristic is applied may be determined. Further, in combination with the above-described embodiment, the period in which the automatic driving is executed is not set, and the present invention can be applied to the case where the occupant requests and starts the automatic driving.
- the driving characteristics of the occupant during manual operation in the current trip are not necessarily controlled by the occupant in the control target of the vehicle. It is also possible to detect the driving characteristics of the occupant during manual driving on the current trip. In other words, the occupant is limited to a part of the control target that the occupant is operating, comparing the occupant's driving characteristics during the current trip with the standard driving characteristics in the current trip, For some control objects that have been operated, the driving characteristics applied to the automatic driving may be set according to the driving characteristics of the occupant during the manual driving in the current trip.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Business, Economics & Management (AREA)
- Game Theory and Decision Science (AREA)
- Medical Informatics (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
以下、本発明を適用した第1実施形態について図面を参照して説明する。
図1は、本実施形態に係る運転制御装置を含む運転制御システムの構成を示すブロック図である。また、図2及び図3は、本実施形態に係る運転制御装置を含む運転制御システムの具体的なハード構成を示すブロック図の一例である。図1に示すように、本実施形態に係る運転制御システム100は、運転制御装置1と、走行状態検出部3と、周囲状況検出部5と、運転切替スイッチ7と、運転特性調整部9と、ディスプレイ11とを備えている。さらに、運転制御システム100は、車両に搭載された制御状態表示モジュール13とアクチュエータ制御モジュール15とアクチュエータ17に接続されている。
次に、本実施形態に係る運転制御装置1による運転特性決定処理の手順を図8のフローチャートを参照して説明する。図8に示す運転特性決定処理は、車両のイグニッションがオンされて現在のトリップが始まると開始する。トリップは、車両のイグニッションがオンされてからオフされるまでの間の走行であるが、目的地まで行く途中にイグニッションを一旦オフした場合には出発地から目的地までを1つのトリップとしてもよい。
以上詳細に説明したように、本実施形態に係る運転制御方法及びその装置では、車両の現在のトリップにおける手動運転時の乗員の運転特性と基準運転特性とを比較する。そして、現在のトリップにおける手動運転時の乗員の運転特性と基準運転特性との間に所定の乖離が生じた場合には、現在のトリップにおける手動運転時の乗員の運転特性に応じて自動運転に適用する運転特性を設定する。これにより、現在のトリップにおいて車両の乗員が普段とは異なる手動運転を行った場合に、過去の手動運転時の乗員の運転特性よりも現在のトリップにおける手動運転時の乗員の運転特性を優先して自動運転に反映させることができる。したがって、車両の乗員が現在のトリップで所望する運転特性で自動運転を実行することができる。
以下、本発明を適用した第2実施形態について図面を参照して説明する。本実施形態の運転特性決定処理では、現在のトリップにおける手動運転を実行している時間が第1所定時間以内である場合には、基準運転特性を適用して自動運転を実行するようにしたことが、第1実施形態と相違している。したがって、図15に示す本実施形態の運転特性決定処理では、ステップS201の処理を追加したことが、図8に示す第1実施形態の運転特性決定処理と相違している。尚、運転制御システムの構成及びステップS201以外の処理は、第1実施形態と同一であるため、詳細な説明は省略する。
以上詳細に説明したように、本実施形態に係る運転制御方法及びその装置では、現在のトリップにおける手動運転を実行している時間が第1所定時間以内である場合には、基準運転特性を適用して自動運転を実行する。これにより、手動運転を実行している時間が短くて十分なデータが蓄積されていない場合に、通常の運転特性で自動運転が実行されるので、運転者に安心感を与えることができる。
以下、本発明を適用した第3実施形態について図面を参照して説明する。本実施形態の運転特性決定処理では、現在のトリップにおける手動運転を実行している時間が第1所定時間以内である場合には、現在のトリップの運転特性と基準運転特性のいずれかを車両の乗員に選択させる。そして、選択された運転特性を適用して自動運転を実行するようにしたことが、第2実施形態と相違している。したがって、図17に示す本実施形態の運転特性決定処理では、ステップS301の処理を追加したことが、図15に示す第2実施形態の運転特性決定処理と相違している。尚、運転制御システムの構成及びステップS301以外の処理は、第2実施形態と同一であるため、詳細な説明は省略する。
以上詳細に説明したように、本実施形態に係る運転制御方法及びその装置では、現在のトリップにおける手動運転を実行している時間が第1所定時間以内である場合に、現在のトリップの運転特性と基準運転特性のいずれかを車両の乗員に選択させる。そして、選択された運転特性を適用して自動運転を実行する。これにより、手動運転を実行している時間が短くて十分なデータが蓄積されていない場合でも、車両の乗員が所望する運転特性で自動運転を実行することができる。
3 走行状態検出部
5 周囲状況検出部
7 運転切替スイッチ
9 運転特性調整部
11 ディスプレイ
13 制御状態表示モジュール
15 アクチュエータ制御モジュール
17 アクチュエータ
21 情報取得部
23 運転特性判定部
25 基準運転特性記憶部
27 運転特性決定部
29 自動運転制御実行部
50 車両
51 CAN
53 ナビゲーション装置
55 カメラ
57 レーザレーダ
59 通信装置
61 サーバ
100 運転制御システム
Claims (16)
- 乗員の運転操作により車両を走行させる手動運転と車両を自動で走行させる自動運転とを切り替え可能な車両において、前記自動運転時に適用する運転特性を設定する運転制御装置の運転制御方法であって、
前記車両の現在のトリップにおける手動運転時の乗員の運転特性と予め記憶された基準運転特性とを比較して、前記現在のトリップにおける手動運転時の乗員の運転特性と前記基準運転特性との間に所定の乖離が生じた場合には、前記現在のトリップにおける手動運転時の乗員の運転特性に応じて前記自動運転に適用する運転特性を設定することを特徴とする運転制御方法。 - 前記車両の過去のトリップにおける手動運転時の乗員の運転特性を前記基準運転特性として設定することを特徴とする請求項1に記載の運転制御方法。
- 前記現在のトリップにおける手動運転を実行している時間が第1所定時間以内である場合には、前記基準運転特性を適用して前記自動運転を実行することを特徴とする請求項1または2に記載の運転制御方法。
- 前記現在のトリップにおいて手動運転を実行している時間が第1所定時間以内である場合には、前記現在のトリップにおける手動運転時の乗員の運転特性と前記基準運転特性のいずれかを前記車両の乗員に選択させ、選択された運転特性を適用して前記自動運転を実行することを特徴とする請求項1または2に記載の運転制御方法。
- 前記手動運転から前記自動運転へ切り替えるときに、前記車両の乗員によって選択された運転特性を前記車両のディスプレイに表示することを特徴とする請求項4に記載の運転制御方法。
- 前記現在のトリップにおいて手動運転を実行している時間が第2所定時間より長い場合には、前記手動運転から前記自動運転へ切り替えられる時点の前で前記第2所定時間より短い第3所定時間以内に蓄積されたデータを用いて、前記現在のトリップにおける手動運転時の乗員の運転特性を設定することを特徴とする請求項1~5のいずれか1項に記載の運転制御方法。
- 前記現在のトリップにおける手動運転時の乗員の運転特性には、前記車両が走行を開始してから第4所定時間以内に蓄積されたデータは使用しないことを特徴とする請求項1~6のいずれか1項に記載の運転制御方法。
- 前記車両の同乗者の有無、同乗者の属性の少なくともいずれかに応じて、前記自動運転に適用する運転特性を調整することを特徴とする請求項1~7のいずれか1項に記載の運転制御方法。
- 前記車両の乗員が希望する目的地への到達希望時間に応じて、前記自動運転に適用する運転特性を調整することを特徴とする請求項1~8のいずれか1項に記載の運転制御方法。
- 前記車両の運転者の身体状態に応じて、前記自動運転に適用する運転特性を調整することを特徴とする請求項1~9のいずれか1項に記載の運転制御方法。
- 前記手動運転時の乗員の運転特性に関するデータは前記車両外のサーバに蓄積されることを特徴とする請求項1~10のいずれか1項に記載の運転制御方法。
- 前記自動運転に適用する運転特性は、前記基準運転特性の所定範囲内に設定されることを特徴とする請求項1~11のいずれか1項に記載の運転制御方法。
- 前記現在のトリップにおける手動運転時の乗員の運転特性に関するデータは、前記車両の速度、前記車両と先行車との間の車間距離、車間時間または相対速度、前記車両のブレーキタイミング、前記車両の加速度、前記車両と対向車または交差車両との間のギャップ時間、前記車両と後側方車両との間の後側方車間距離または後側方車間時間、前記車両と駐停車車両との間の側方距離のうちの少なくとも1つであることを特徴とする請求項1~12のいずれか1項に記載の運転制御方法。
- 前記車両の乗員からの要求を受け付けて、前記自動運転に適用する運転特性を調整することを特徴とする請求項1~13のいずれか1項に記載の運転制御方法。
- 前記車両の乗員からの要求履歴は、前記現在のトリップにおける手動運転時の乗員の運転特性に関するデータとして蓄積されることを特徴とする請求項14に記載の運転制御方法。
- 乗員の運転操作により車両を走行させる手動運転と車両を自動で走行させる自動運転とを切り替え可能な車両において、前記自動運転時に適用する運転特性を設定する運転制御装置であって、
前記車両の現在のトリップにおける手動運転時の乗員の運転特性と予め記憶された基準運転特性とを比較して、前記現在のトリップにおける手動運転時の乗員の運転特性と前記基準運転特性との間に所定の乖離が生じた場合には、前記現在のトリップにおける手動運転時の乗員の運転特性に応じて前記自動運転に適用する運転特性を設定するコントローラを備えたことを特徴とする運転制御装置。
Priority Applications (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP20196831.0A EP3778333B1 (en) | 2016-05-27 | 2016-05-27 | Driving control method and driving control apparatus |
| KR1020187034486A KR102028852B1 (ko) | 2016-05-27 | 2016-05-27 | 운전 제어 방법 및 운전 제어 장치 |
| CN201680086105.0A CN109153388B (zh) | 2016-05-27 | 2016-05-27 | 驾驶控制方法及驾驶控制装置 |
| JP2018518919A JP6551604B2 (ja) | 2016-05-27 | 2016-05-27 | 運転制御方法及び運転制御装置 |
| PCT/JP2016/065737 WO2017203694A1 (ja) | 2016-05-27 | 2016-05-27 | 運転制御方法及び運転制御装置 |
| CA3025643A CA3025643C (en) | 2016-05-27 | 2016-05-27 | Driving control method and driving control apparatus |
| EP16903175.4A EP3466789B1 (en) | 2016-05-27 | 2016-05-27 | Driving control method and driving control device |
| US16/303,514 US10710610B2 (en) | 2016-05-27 | 2016-05-27 | Driving control method and driving control apparatus |
| RU2018145984A RU2699205C1 (ru) | 2016-05-27 | 2016-05-27 | Способ управления вождением и устройство управления вождением |
| MX2018014353A MX373547B (es) | 2016-05-27 | 2016-05-27 | Método de control de conducción y aparato de control de conducción. |
| BR112018074374-7A BR112018074374B1 (pt) | 2016-05-27 | 2016-05-27 | Método de controle de direção e aparelho de controle de direção |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/065737 WO2017203694A1 (ja) | 2016-05-27 | 2016-05-27 | 運転制御方法及び運転制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017203694A1 true WO2017203694A1 (ja) | 2017-11-30 |
Family
ID=60411697
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/065737 Ceased WO2017203694A1 (ja) | 2016-05-27 | 2016-05-27 | 運転制御方法及び運転制御装置 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10710610B2 (ja) |
| EP (2) | EP3778333B1 (ja) |
| JP (1) | JP6551604B2 (ja) |
| KR (1) | KR102028852B1 (ja) |
| CN (1) | CN109153388B (ja) |
| BR (1) | BR112018074374B1 (ja) |
| CA (1) | CA3025643C (ja) |
| MX (1) | MX373547B (ja) |
| RU (1) | RU2699205C1 (ja) |
| WO (1) | WO2017203694A1 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019123321A (ja) * | 2018-01-15 | 2019-07-25 | 本田技研工業株式会社 | 車両走行制御装置 |
| JP2019123283A (ja) * | 2018-01-12 | 2019-07-25 | 本田技研工業株式会社 | 制御装置、制御装置の動作方法及びプログラム |
| JP2019127207A (ja) * | 2018-01-26 | 2019-08-01 | 株式会社デンソーテン | 運転支援装置、及び運転特性の学習方法 |
| JP2019131145A (ja) * | 2018-02-02 | 2019-08-08 | 本田技研工業株式会社 | 制御装置 |
| JP2019156355A (ja) * | 2018-03-16 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置 |
| JP2019162986A (ja) * | 2018-03-20 | 2019-09-26 | 本田技研工業株式会社 | 制御装置 |
| JPWO2019142276A1 (ja) * | 2018-01-17 | 2020-10-22 | 三菱電機株式会社 | 運転制御装置、運転制御方法及び運転制御プログラム |
| WO2020246632A1 (ko) * | 2019-06-04 | 2020-12-10 | 엘지전자 주식회사 | 자율 주행 차량과 그 제어 방법 |
| JP2022156395A (ja) * | 2021-03-31 | 2022-10-14 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
| JP7651329B2 (ja) | 2021-03-12 | 2025-03-26 | 株式会社Subaru | 車両の運転支援システム及び情報処理装置 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018163288A1 (ja) * | 2017-03-07 | 2018-09-13 | 日産自動車株式会社 | 走行支援方法及び運転制御装置 |
| US20190185012A1 (en) | 2017-12-18 | 2019-06-20 | PlusAI Corp | Method and system for personalized motion planning in autonomous driving vehicles |
| US11273836B2 (en) | 2017-12-18 | 2022-03-15 | Plusai, Inc. | Method and system for human-like driving lane planning in autonomous driving vehicles |
| US11130497B2 (en) | 2017-12-18 | 2021-09-28 | Plusai Limited | Method and system for ensemble vehicle control prediction in autonomous driving vehicles |
| JP6959170B2 (ja) * | 2018-03-22 | 2021-11-02 | 株式会社シマノ | 人力駆動車両用制御装置 |
| JP7155975B2 (ja) * | 2018-12-10 | 2022-10-19 | トヨタ自動車株式会社 | 車両制御装置 |
| US11899448B2 (en) * | 2019-02-21 | 2024-02-13 | GM Global Technology Operations LLC | Autonomous vehicle that is configured to identify a travel characteristic based upon a gesture |
| JP7232094B2 (ja) * | 2019-03-25 | 2023-03-02 | 株式会社Subaru | 車両の制御装置、車両の制御方法及びプログラム |
| JP7354295B2 (ja) | 2019-05-23 | 2023-10-02 | ストリートスコープ,インコーポレイテッド | 車両信号を処理して挙動危険性の測度を計算するための装置及び方法 |
| JP7084896B2 (ja) * | 2019-07-11 | 2022-06-15 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、及びプログラム |
| KR102805127B1 (ko) * | 2019-08-12 | 2025-05-09 | 현대자동차주식회사 | 주행 모드 제어 시스템 |
| WO2021061430A1 (en) * | 2019-09-24 | 2021-04-01 | Apple Inc. | Systems and methods for hedging for different gaps in an interaction zone |
| US10696306B1 (en) | 2019-09-25 | 2020-06-30 | Lyft Inc. | Evaluating driving control systems for elegant driving |
| KR102379692B1 (ko) * | 2019-11-11 | 2022-03-29 | 한국과학기술원 | 자율주행차량의 주행 안정시점 판단방법 및 컴퓨터 프로그램 |
| US20230049927A1 (en) * | 2019-12-17 | 2023-02-16 | Zf Friedrichshafen Ag | Autonomous Drive Function Which Takes Driver Interventions into Consideration for a Motor Vehicle |
| CN114572240B (zh) * | 2020-11-30 | 2023-11-14 | 北京百度网讯科技有限公司 | 车辆行驶控制方法、装置、车辆、电子设备及存储介质 |
| US11753031B2 (en) * | 2020-12-11 | 2023-09-12 | GM Global Technology Operations LLC | Autonomous driving control systems and methods |
| CN115179966B (zh) * | 2021-04-07 | 2025-03-07 | 上海汽车集团股份有限公司 | 车辆功能控制意图确定方法、装置、电子设备及存储介质 |
| DE102021206007A1 (de) * | 2021-06-14 | 2022-12-15 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Durchführen eines Anfahrvorgangs für ein wenigstens teilweise automatisiertes Fahrzeug |
| JP7616183B2 (ja) * | 2022-09-22 | 2025-01-17 | トヨタ自動車株式会社 | 走行計画作成装置、走行計画作成方法、および走行計画作成用コンピュータプログラム |
| US12179788B2 (en) * | 2022-12-15 | 2024-12-31 | Bendix Commercial Vehicle Systems Llc | System and method for assessing driver alertness based on a braking request and forward vehicle distance information |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000231326A (ja) * | 1998-12-24 | 2000-08-22 | Daimlerchrysler Ag | 自動車における運転者の運転スタイルを分類する方法及び装置 |
| JP2001071833A (ja) * | 1999-09-08 | 2001-03-21 | Nissan Motor Co Ltd | 車両用情報報知装置 |
| JP2009110184A (ja) * | 2007-10-29 | 2009-05-21 | Toyota Motor Corp | 走行支援装置 |
| JP2010198120A (ja) * | 2009-02-23 | 2010-09-09 | Nissan Motor Co Ltd | 運転状態判定装置及び運転状態判定方法 |
| JP2016020177A (ja) * | 2014-07-15 | 2016-02-04 | 株式会社デンソー | 運転制御装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4638277B2 (ja) * | 2005-05-17 | 2011-02-23 | 富士重工業株式会社 | 車両の走行制御装置 |
| JP5732782B2 (ja) * | 2010-08-31 | 2015-06-10 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP5598411B2 (ja) * | 2011-04-20 | 2014-10-01 | 日産自動車株式会社 | 車両用情報提供装置 |
| US8788113B2 (en) * | 2011-06-13 | 2014-07-22 | Ford Global Technologies, Llc | Vehicle driver advisory system and method |
| US9569984B2 (en) * | 2012-12-11 | 2017-02-14 | Abalta Technologies, Inc. | Recording, monitoring, and analyzing driver behavior |
| DE102013210941A1 (de) * | 2013-06-12 | 2014-12-18 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugs |
| DE102013011538B4 (de) * | 2013-07-10 | 2017-12-07 | Audi Ag | Verfahren zum Betrieb eines längsführenden Fahrerassistenzsystems eines Kraftfahrzeugs und Kraftfahrzeug |
| KR101459473B1 (ko) * | 2013-08-30 | 2014-11-10 | 현대자동차 주식회사 | 차량용 자동 변속기의 변속 제어 방법 |
| JP5839010B2 (ja) * | 2013-09-11 | 2016-01-06 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2015089801A (ja) | 2013-11-07 | 2015-05-11 | 株式会社デンソー | 運転制御装置 |
| US20150166069A1 (en) * | 2013-12-18 | 2015-06-18 | Ford Global Technologies, Llc | Autonomous driving style learning |
| JP6520506B2 (ja) * | 2014-09-03 | 2019-05-29 | 株式会社デンソー | 車両の走行制御システム |
| US10077056B1 (en) * | 2015-04-24 | 2018-09-18 | State Farm Mutual Automobile Insurance Company | Managing self-driving behavior of autonomous or semi-autonomous vehicle based upon actual driving behavior of driver |
| EP3357780B1 (en) * | 2015-09-30 | 2022-10-26 | Sony Group Corporation | Driving control device, driving control method, and program |
| US10035519B2 (en) * | 2016-03-15 | 2018-07-31 | GM Global Technology Operations LLC | System and method for autonomous vehicle driving behavior modification |
| JP6368957B2 (ja) * | 2016-05-10 | 2018-08-08 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
-
2016
- 2016-05-27 BR BR112018074374-7A patent/BR112018074374B1/pt not_active IP Right Cessation
- 2016-05-27 KR KR1020187034486A patent/KR102028852B1/ko not_active Expired - Fee Related
- 2016-05-27 EP EP20196831.0A patent/EP3778333B1/en active Active
- 2016-05-27 RU RU2018145984A patent/RU2699205C1/ru active
- 2016-05-27 WO PCT/JP2016/065737 patent/WO2017203694A1/ja not_active Ceased
- 2016-05-27 MX MX2018014353A patent/MX373547B/es active IP Right Grant
- 2016-05-27 JP JP2018518919A patent/JP6551604B2/ja active Active
- 2016-05-27 CA CA3025643A patent/CA3025643C/en active Active
- 2016-05-27 EP EP16903175.4A patent/EP3466789B1/en active Active
- 2016-05-27 US US16/303,514 patent/US10710610B2/en active Active
- 2016-05-27 CN CN201680086105.0A patent/CN109153388B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000231326A (ja) * | 1998-12-24 | 2000-08-22 | Daimlerchrysler Ag | 自動車における運転者の運転スタイルを分類する方法及び装置 |
| JP2001071833A (ja) * | 1999-09-08 | 2001-03-21 | Nissan Motor Co Ltd | 車両用情報報知装置 |
| JP2009110184A (ja) * | 2007-10-29 | 2009-05-21 | Toyota Motor Corp | 走行支援装置 |
| JP2010198120A (ja) * | 2009-02-23 | 2010-09-09 | Nissan Motor Co Ltd | 運転状態判定装置及び運転状態判定方法 |
| JP2016020177A (ja) * | 2014-07-15 | 2016-02-04 | 株式会社デンソー | 運転制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3466789A4 * |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019123283A (ja) * | 2018-01-12 | 2019-07-25 | 本田技研工業株式会社 | 制御装置、制御装置の動作方法及びプログラム |
| CN110053623A (zh) * | 2018-01-15 | 2019-07-26 | 本田技研工业株式会社 | 车辆行驶控制装置 |
| JP2019123321A (ja) * | 2018-01-15 | 2019-07-25 | 本田技研工業株式会社 | 車両走行制御装置 |
| US10871773B2 (en) | 2018-01-15 | 2020-12-22 | Honda Motor Co., Ltd. | Vehicle travel control apparatus |
| JPWO2019142276A1 (ja) * | 2018-01-17 | 2020-10-22 | 三菱電機株式会社 | 運転制御装置、運転制御方法及び運転制御プログラム |
| JP2019127207A (ja) * | 2018-01-26 | 2019-08-01 | 株式会社デンソーテン | 運転支援装置、及び運転特性の学習方法 |
| JP7120534B2 (ja) | 2018-01-26 | 2022-08-17 | 株式会社デンソーテン | 運転支援装置、及び運転特性の学習方法 |
| JP2019131145A (ja) * | 2018-02-02 | 2019-08-08 | 本田技研工業株式会社 | 制御装置 |
| CN110281942A (zh) * | 2018-03-16 | 2019-09-27 | 本田技研工业株式会社 | 车辆控制装置 |
| JP2019156355A (ja) * | 2018-03-16 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置 |
| CN110304035A (zh) * | 2018-03-20 | 2019-10-08 | 本田技研工业株式会社 | 控制装置 |
| JP2019162986A (ja) * | 2018-03-20 | 2019-09-26 | 本田技研工業株式会社 | 制御装置 |
| WO2020246632A1 (ko) * | 2019-06-04 | 2020-12-10 | 엘지전자 주식회사 | 자율 주행 차량과 그 제어 방법 |
| JP7651329B2 (ja) | 2021-03-12 | 2025-03-26 | 株式会社Subaru | 車両の運転支援システム及び情報処理装置 |
| JP2022156395A (ja) * | 2021-03-31 | 2022-10-14 | トヨタ自動車株式会社 | 車両衝突回避支援装置 |
| JP7608940B2 (ja) | 2021-03-31 | 2025-01-07 | トヨタ自動車株式会社 | 車両制御装置、車両制御装置を備えた車両、車両制御方法及び車両制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3466789A4 (en) | 2019-11-27 |
| RU2699205C1 (ru) | 2019-09-03 |
| EP3778333B1 (en) | 2021-11-17 |
| BR112018074374A2 (pt) | 2019-03-06 |
| KR20190005895A (ko) | 2019-01-16 |
| EP3466789B1 (en) | 2020-12-16 |
| US10710610B2 (en) | 2020-07-14 |
| EP3778333A1 (en) | 2021-02-17 |
| CA3025643C (en) | 2019-07-09 |
| JPWO2017203694A1 (ja) | 2019-03-22 |
| JP6551604B2 (ja) | 2019-07-31 |
| CN109153388A (zh) | 2019-01-04 |
| CN109153388B (zh) | 2019-09-03 |
| KR102028852B1 (ko) | 2019-10-04 |
| BR112018074374B1 (pt) | 2022-12-13 |
| EP3466789A1 (en) | 2019-04-10 |
| US20190337530A1 (en) | 2019-11-07 |
| CA3025643A1 (en) | 2017-11-30 |
| MX2018014353A (es) | 2019-03-14 |
| MX373547B (es) | 2020-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6551604B2 (ja) | 運転制御方法及び運転制御装置 | |
| CN110914127B (zh) | 驾驶辅助方法及驾驶辅助装置 | |
| JP2020119517A (ja) | 運転者を支援する方法、運転者支援システム、およびこのような運転者支援システムを備えた車両 | |
| EP3848271A1 (en) | Travel control method and travel control device for vehicle | |
| CN113272192A (zh) | 车辆控制系统和方法 | |
| US20100250045A1 (en) | Vehicle operation diagnosis device, vehicle operation diagnosis method, and computer program | |
| JPWO2020049722A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| CN112533812A (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| KR20190022759A (ko) | 자동 운전 차량의 제어 방법 및 제어 장치 | |
| WO2018155266A1 (ja) | 情報処理システム、情報処理方法、プログラムと記録媒体 | |
| JPWO2017203691A1 (ja) | 運転制御方法及び運転制御装置 | |
| WO2018155265A1 (ja) | 情報処理システム、情報処理方法、プログラムと記録媒体 | |
| US20250206355A1 (en) | Mobile object control device, mobile object control method, and mobile object | |
| JP2019011028A (ja) | 車両制御装置 | |
| CN115891994A (zh) | 用于运行用于自动侧向引导的驾驶辅助的方法 | |
| WO2018138767A1 (ja) | 走行特性学習方法及び運転制御装置 | |
| US12084023B2 (en) | Braking control method and braking control device | |
| KR20190067573A (ko) | 차량의 차로 변경 제어 장치 및 방법 | |
| EP4520607A1 (en) | Automated driving system and control method for automated driving system | |
| US20260116422A1 (en) | Control device and method for controlling a vehicle | |
| WO2019021430A1 (ja) | 走行制御方法及び走行制御装置 | |
| WO2026038489A1 (ja) | 車両制御システム、車両制御方法及び車両制御プログラム | |
| CN117944672A (zh) | 用于运行自动化的纵向引导的方法和设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2018518919 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 3025643 Country of ref document: CA |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16903175 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 20187034486 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112018074374 Country of ref document: BR |
|
| ENP | Entry into the national phase |
Ref document number: 2016903175 Country of ref document: EP Effective date: 20190102 |
|
| ENP | Entry into the national phase |
Ref document number: 112018074374 Country of ref document: BR Kind code of ref document: A2 Effective date: 20181126 |