WO2017209124A1 - 隊列走行システム - Google Patents
隊列走行システム Download PDFInfo
- Publication number
- WO2017209124A1 WO2017209124A1 PCT/JP2017/020090 JP2017020090W WO2017209124A1 WO 2017209124 A1 WO2017209124 A1 WO 2017209124A1 JP 2017020090 W JP2017020090 W JP 2017020090W WO 2017209124 A1 WO2017209124 A1 WO 2017209124A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- platooning
- unit
- contribution
- vehicles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images


Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q30/00—Commerce
- G06Q30/02—Marketing; Price estimation or determination; Fundraising
- G06Q30/0283—Price estimation or determination
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0217—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory in accordance with energy consumption, time reduction or distance reduction criteria
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0295—Fleet control by at least one leading vehicle of the fleet
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/04—Forecasting or optimisation specially adapted for administrative or management purposes, e.g. linear programming or "cutting stock problem"
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/40—Business processes related to the transportation industry
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/22—Platooning, i.e. convoy of communicating vehicles
Definitions
- the present disclosure relates to a platooning system for causing a plurality of vehicles having an automatic driving function to perform platooning.
- platooning in which vehicles that can be driven automatically form a vehicle group.
- the leading vehicle in the platoon is the service providing side and the follow-up vehicle is the service using side, and the service using side pays the service provider to the service providing side.
- Distribution technology has been proposed.
- the inventors have found the following problems. That is, the profits obtained from vehicles participating in the platooning have not only the reduction of the driving load on the follower vehicle but also the improvement of fuel consumption. When paying attention to this fuel economy improvement effect, the leading vehicle can also gain profits, and the profits are determined by the characteristics of each vehicle and the order of the platoons. Therefore, the approach that considers only the top car as the service provider cannot maximize the issue of the platooning participants, or the problem of not being able to feel that the profits are distributed fairly, and the profit of the entire platoon. The problem was found. In addition, it has been found that it is difficult to give the driver motivation to participate in the platooning.
- the convoy travel system includes an extraction unit, an order determination unit, a schedule notification unit, a contribution calculation unit, and a billing unit.
- the extraction unit is configured to acquire traveling schedules of a plurality of vehicles each having an automatic driving function, and extract a plurality of target vehicles to be subjected to platooning from the plurality of vehicles.
- the order determination unit is configured to determine the arrangement order of the plurality of target vehicles in the platooning using linear programming based on the characteristic information representing the characteristics of the plurality of target vehicles extracted by the extraction unit. ing.
- the schedule notification unit is configured to notify the plurality of target vehicles extracted by the extraction unit of the formation information including at least the arrangement order determined by the order determination unit.
- the contribution calculation unit obtains the contribution of each of the plurality of target vehicles to the overall gain obtained by the platooning using gain information reflecting the gain obtained by participating in the platooning of the plurality of target vehicles. It is configured as follows. When the charging section confirms the execution of the platooning according to the platoon information, according to the contribution calculated by the contribution calculating section, each of the plurality of target vehicles can obtain a fair profit. The billing for each of the plurality of target vehicles is determined.
- the gain can be distributed fairly to each vehicle.
- the driver can be motivated to participate in the platooning.
- the convoy travel system 1 includes a plurality of vehicles 10, a delivery center 20 provided for each delivery company, and a support center 30 common to the delivery companies. All vehicles participating in the formation are commercial delivery trucks. Each vehicle belongs to one of a plurality of delivery companies.
- the plurality of vehicles 10 all have an automatic driving function. Thus, all the vehicles 10 have the same configuration.
- Each of the vehicles 10 includes an external communication unit 11, a navigation device 12, an inter-vehicle communication unit 13, a human-machine interface (HMI) unit 14, a vehicle control unit 15, and a row running unit 16. These units are connected to each other via a vehicle-mounted network 17 so that they can communicate with each other.
- HMI human-machine interface
- the external communication unit 11 performs wireless communication with the delivery center 20 of the delivery company to which the host vehicle belongs, and transmits and receives various information related to delivery. Specifically, the external communication unit 11 receives delivery information, which is information related to the delivery schedule, and platoon information, which is information related to platooning, from the delivery center 20. The external communication unit 11 transmits to the distribution center 20 a start notification, an end notification, and the like that indicate the implementation status of the convoy travel according to the convoy information.
- the external communication unit 11 may be configured using a communication device such as a mobile phone, a DSRC communication device, an ETC on-board device, and the like.
- the communication device used as the external communication unit 11 is not limited to any one of the above-described communication devices, and a plurality of types of communication devices may be used in combination.
- the navigation device 12 has a function of detecting the position of the host vehicle and the traveling direction (direction) of the host vehicle using GPS and the like, a function of searching for a route to a set destination, and a function of guidance. These functions are well known.
- the inter-vehicle communication unit 13 transmits and receives various types of information necessary for platooning by performing communication with other vehicles. Details thereof will be described later.
- the HMI unit 16 includes a display unit such as an LCD and an operation input unit such as a touch panel.
- the HMI unit 16 is for performing necessary status display relating to platooning, notification of starting and ending of platooning, communication within the platoon, and the like. Note that the function of the HMI unit 16 may be integrated into the navigation device 12.
- the vehicle control unit 15 controls the amount of control operation used for controlling the vehicle, such as the throttle opening, the steering angle, the brake operation amount, the gear stage, and the traveling of the vehicle such as the current position, speed, acceleration, yaw rate, and traveling direction. It is comprised so that the driving
- the vehicle control unit 15 provides the control operation amount and the running state amount of the own vehicle to other vehicles existing around the own vehicle via the inter-vehicle communication unit 13, and the control operation amount and the travel state amount of the other vehicle. get.
- the vehicle control unit 15 executes automatic driving according to the route information set in the navigation device 12 and the automatic driving target values (for example, inter-vehicle distance, inter-vehicle time, vehicle speed, etc.) given from the convoy travel unit 16 or the like. It is configured as follows. In automatic driving, the engine, brake, steering, transmission, and the like are automatically controlled based on the control operation amount and the running state amount of the host vehicle and other vehicles.
- the automatic driving target values for example, inter-vehicle distance, inter-vehicle time, vehicle speed, etc.
- the convoy travel unit 16 includes a microcomputer including a CPU 161 and a semiconductor memory (hereinafter referred to as a memory 162) such as a RAM, a ROM, and a flash memory.
- a memory 162 such as a RAM, a ROM, and a flash memory.
- Various functions of the convoy travel unit 16 are realized by the CPU 161 executing a program stored in a non-transitional physical recording medium.
- the memory 162 corresponds to a non-transitional tangible recording medium that stores a program. Further, by executing this program, a method corresponding to the program is executed.
- the row running unit 16 may include one microcomputer or a plurality of microcomputers.
- the convoy travel unit 16 executes at least a convoy execution process, which will be described later, by the CPU 161 executing the program.
- a target value necessary for platooning is set, and this target value is provided to the vehicle control unit 15.
- the vehicle control unit 15 performs automatic driving according to the provided target value. As a result, platooning is realized.
- a delivery center 20 is provided for each delivery company.
- the distribution center 20 includes a vehicle communication unit 21 that communicates with a vehicle (hereinafter, “own vehicle”) 10 that belongs to the company, a center communication unit 22 that communicates with the support center 30, and a delivery schedule of the company vehicle 10.
- the vehicle allocation processing unit 23 that manages the vehicle 10 is provided.
- the vehicle allocation processing unit 23 includes a microcomputer including a CPU and a memory, similar to the row running unit 16 described above.
- the memory stores at least the delivery schedule of each company vehicle 10 and the fuel consumption information indicating the fuel consumption of the company vehicle.
- the delivery schedule includes at least a delivery destination as a destination, a travel route to the delivery destination, and an estimated arrival time at the delivery destination. Further, the delivery schedule includes a scheduled time for passing an interchange (hereinafter referred to as an IC) when a highway is included in the travel route.
- the vehicle allocation processing unit 23 receives distribution information from the support center 30 by communication via the center communication unit 22.
- the vehicle allocation processing unit 23 performs information provision processing for providing a delivery schedule and platoon information related to the requesting vehicle in response to a request from the individual vehicle 10 through communication via the vehicle communication unit 21. To do.
- the support center 30 includes a communication unit 31 and a formation processing unit 32.
- the communication unit 31 communicates with the distribution center 20 of each company.
- the convoy processing unit 32 generates various types of information related to the execution of the convoy travel based on the information acquired via the communication unit 31.
- the convoy processing unit 32 includes a microcomputer including a CPU and a memory, like the convoy traveling unit 16 and the dispatching processing unit 23 described above.
- the formation processing unit 32 performs at least a formation generation process and a billing process, which will be described later, by communicating with each distribution center 20 via the communication unit 31.
- the method for realizing each function executed by the convoy travel unit 16, the dispatch processing unit 23, and the convoy processing unit 32 is not limited to software.
- part or all of the functions may be realized using hardware that combines a logic circuit, an analog circuit, and the like.
- Formation information generation process The formation information generation process executed by the formation processing unit 32 of the support center 30 will be described with reference to the flowchart of FIG. This process is periodically started at a preset timing, for example, after a delivery schedule for the next day is determined by each delivery company.
- the procession processing unit 32 acquires a delivery schedule and vehicle fuel consumption information related to the delivery schedule from the delivery center 20 of each company via the communication unit 31 in S110.
- one candidate vehicle group is selected from the extraction result in S120.
- the arrangement order when the platooning is performed is determined. This arrangement order is determined by a linear programming method that focuses on the fuel efficiency improvement effect of the entire platoon. Details of the determination method will be described later.
- formation information is generated.
- the formation information includes the starting point and scheduled start time of the convoy travel, the end point and scheduled end time of the convoy travel, the participating vehicle of the convoy travel, the arrangement order of the convoy travel, and the like.
- S160 it is determined whether or not formation information has been generated for all candidate vehicle groups extracted in S120. If there is a candidate vehicle group for which no formation information is generated, the process returns to S130 and the same processing is repeated. If the formation information has been generated for all candidate vehicle groups, the process proceeds to S170.
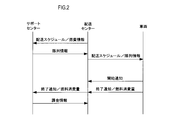
- each distribution center 20 In S ⁇ b> 170, the generated formation information is distributed to each distribution center 20. Thereafter, this process is terminated. That is, as shown in FIG. 2, the support center 30 acquires the delivery schedule and fuel consumption information from each delivery center 20, and distributes the formation information generated based on the delivery schedule and fuel efficiency information to each delivery center 20. Each distribution center 20 to which the column information is distributed stores this column information. In response to a request from the vehicle 10, each distribution center 20 provides platoon information to the requesting vehicle together with a distribution schedule.
- the convoy travel unit 16 acquires the distribution schedule and convoy information from the distribution center 20 in S310.
- the route indicated in the delivery schedule is set in the navigation device 12.
- S330 it is determined whether there is formation information relating to the own vehicle. If there is no formation information related to the own vehicle, this process is terminated. If there is formation information relating to the own vehicle, the process proceeds to S340. In S340, based on the formation information, information such as the section in which the formation is executed is set in the navigation device 12.
- S350 based on information obtained from the navigation device 12, the inter-vehicle communication unit 13, the vehicle control unit 15 or the like, it is determined whether or not the row running has been started. If the convoy travel has not started, it waits until it is determined that it has started. When the convoy travel is started, the process proceeds to S360.
- a remaining fuel amount at the time of starting fuel is detected from a fuel sensor (not shown) via the in-vehicle network 17 and stored.
- a start notification indicating that the platooning has started is transmitted to the company's own distribution center 20 via the external communication unit 11.
- S370 based on information obtained from the navigation device 12, the inter-vehicle communication unit 13, the vehicle control unit 15 or the like, it is determined whether or not the platooning is finished. If the platooning has not ended, it waits until it is determined that it has ended. When the convoy travel ends, the process proceeds to S380.
- the remaining amount at the end which is the remaining amount of fuel at the end of the platooning, is detected from the above fuel sensor via the in-vehicle network 17. Further, the fuel consumption amount during the platooning is obtained from the difference between the detected remaining amount at the end and the remaining amount at the start stored in S360.
- the vehicle 10 acquires a delivery schedule and platoon information from its own delivery center 20 as shown in FIG. Then, the vehicle 10 transmits a start notification to the distribution center 20 when starting the row running based on the obtained row information. In addition, when the vehicle 10 finishes the platooning, the vehicle 10 transmits a fuel consumption amount and an end notification to the distribution center 20. The distribution center 20 transfers the end notification and fuel consumption received from the vehicle to the support center 30.
- the procession processing unit 32 determines whether or not an end notification has been received from all the vehicles (hereinafter referred to as participating vehicles) that have made a convoy travel with the vehicle that has transmitted the end notification in S210. to decide. If there is a vehicle for which an end notification has not been received, this processing is temporarily ended. If the end notification is received from all the vehicles, the process proceeds to S220.
- the contribution degree of each participating vehicle to the fuel efficiency improvement effect of the entire platoon is calculated by obtaining the shear play value.
- fuel consumption information on participating vehicles a travel distance of the platoon travel, and a fuel efficiency improvement coefficient determined by a position in the platoon are used. Details of the method for calculating the contribution will be described later.
- billing information for each vehicle is generated according to the calculated contribution. Details of the billing information generation method will be described later.
- the calculated charging information is tabulated and stored for each delivery company. Thereafter, this process is terminated.
- the support center 30 generates and tabulates billing information according to the end notification.
- the aggregated billing information is transmitted to each delivery company or a financial institution performing settlement at a predetermined timing (for example, once a month).
- the fuel efficiency improvement coefficient representing the fuel efficiency improvement effect of each vehicle by the platooning is determined by the vehicle interval and the position in the platoon.
- the fuel efficiency improvement coefficient a value obtained by (ST) / S is used when the fuel efficiency T when traveling in tandem is changed from the fuel efficiency S when traveling alone.
- the fuel efficiency improvement coefficient is 0.08 for the leading vehicle, 0.15 for the trailing vehicle, and 0.2 for the other intermediate vehicles.
- This fuel efficiency improvement coefficient is given as known information.
- the fuel price is 100 yen per liter.
- an expected reduction amount is calculated for each of the vehicles A, B, and C.
- the expected reduction amount is a fuel reduction amount expected when each vehicle travels the planned distance at each position in the formation based on the fuel consumption of each vehicle and the fuel consumption improvement coefficient corresponding to the position in the formation.
- Table 2 shows the results of calculating the expected reduction amount.
- the fuel consumption is 10 [km / l] for vehicle A, 8 [km / l] for vehicle B, and 4 [km / l] for vehicle C.
- the total reduction amount is maximized when the arrangement order is “vehicle A, vehicle C, vehicle B”.
- This arrangement order is determined as the arrangement order of the platooning.
- a representative value of the total reduction amount is set for each combination of vehicles.
- the combination of vehicles used here refers to a combination of vehicles that form a platoon only in a different arrangement order.
- the representative value of the total reduction amount is a maximum value among the total reduction amounts of all the arrangement patterns belonging to the vehicle combination of interest.
- the representative value of the total reduction amount is 0 [l] if none of the vehicles A, B, and C constitutes a platoon, 13.375 [l] if any of the vehicles A and B constitutes a platoon, If C constitutes a platoon, 22.75 [l], vehicles B and C constitute a platoon, 23.75 [l], and if vehicles A, B, and C constitute a platoon, 38.375 [l]. Become.
- vehicle A joins the formation.
- 0 [l] which is a representative value of the total reduction amount in the row A in Table 3
- Vehicle B then joins the platoon.
- vehicle C joins the platoon.
- the contribution degree 13.375 [l] of the vehicle B which is a profit when the vehicle C is not participating, was subtracted from the representative value 38.375 [l] of the total reduction amount in the column ABC in Table 3.
- the value, that is, 25 [l] is the contribution degree of the vehicle C in this arrangement order.
- a shear play value which is an expected contribution value, is calculated for each vehicle.
- this shear play value is referred to as a contribution reduction amount representing the contribution of each vehicle.
- the loss amount for each vehicle is calculated. Specifically, as shown in Table 5, the expected reduction amount of each vehicle in the arrangement order is calculated from Table 2 according to the previously determined arrangement order “vehicle A, vehicle C, vehicle B”. To do. Next, for each vehicle, the profit / loss amount is calculated by subtracting the contribution reduction amount (that is, the shear play value) obtained in Table 4 from the calculated expected reduction amount. When the loss amount is positive, it indicates that the profit obtained by the own vehicle, that is, the expected reduction amount of the own vehicle is larger than the contribution degree of the own vehicle. On the contrary, when the loss amount is negative, it indicates that the profit gained by the own vehicle is small compared to the contribution degree of the own vehicle. The result of multiplying the amount of profits and losses by the fuel price per unit is used as the charge amount. That is, if it is positive, it will be expenditure, if it is negative, it will be income.
- the contribution of each vehicle to the fuel efficiency improvement effect of the entire platoon is obtained, and the difference from the expected fuel efficiency improvement effect is charged to each vehicle or the delivery company to which the vehicle belongs. For this reason, no matter how the arrangement order of the vehicles participating in the platooning is set, the profit resulting from participating in the platooning can be distributed fairly to each vehicle. As a result, it is possible to set an arrangement order that maximizes the overall gain without giving an unfair feeling. Furthermore, it is possible to give a motivation to participate in the platooning to the delivery company and the driver.
- the expected reduction amount of each vehicle obtained from Table 2 is used for generating the billing information, but the present disclosure is not limited to this.
- an actual reduction amount calculated from the fuel consumption amount indicated in the end notification may be used instead of the expected reduction amount.
- the distribution center 20 and the support center 30 are provided separately, but the present disclosure is not limited to this.
- a common delivery center may be provided in each delivery company having a function of integrating both centers 20 and 30.
- the fuel consumption is used as a vehicle characteristic to be noted when determining the arrangement order of the vehicles in the platooning, and the fuel reduction amount is used as gain information used to calculate the contribution of each vehicle to the platooning.
- the present disclosure is not limited to this. Any information may be used as the gain information as long as the profit and loss of each vehicle participating in the platooning can be quantified.
- the vehicle participating in the platooning is a gasoline vehicle, but the present disclosure is not limited to this.
- the vehicle may be a diesel vehicle or an electric vehicle.
- electricity cost may be used instead of fuel consumption.
- a plurality of functions of one constituent element in the above embodiment may be realized by a plurality of constituent elements, or a single function of one constituent element may be realized by a plurality of constituent elements. . Further, a plurality of functions possessed by a plurality of constituent elements may be realized by one constituent element, or one function realized by a plurality of constituent elements may be realized by one constituent element. Moreover, you may abbreviate
- at least a part of the configuration of the above embodiment may be added to or replaced with the configuration of the other embodiment.
- all the aspects included in the technical idea specified from the wording described in the claims are embodiments of the present disclosure.
- a program for causing a computer to function as a device that implements each function constituting the platooning system, a non-transitional actual state of a semiconductor memory or the like in which the program is recorded can also be realized in various forms such as a recording medium and a charging method for platooning.
Landscapes
- Business, Economics & Management (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Strategic Management (AREA)
- Economics (AREA)
- Development Economics (AREA)
- Theoretical Computer Science (AREA)
- General Business, Economics & Management (AREA)
- Marketing (AREA)
- Human Resources & Organizations (AREA)
- Entrepreneurship & Innovation (AREA)
- Tourism & Hospitality (AREA)
- Game Theory and Decision Science (AREA)
- Accounting & Taxation (AREA)
- Operations Research (AREA)
- Finance (AREA)
- Quality & Reliability (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Health & Medical Sciences (AREA)
- Primary Health Care (AREA)
- General Health & Medical Sciences (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Traffic Control Systems (AREA)
- Medical Informatics (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
隊列走行システムは、抽出部(32,S110~S120)と、順序決定部(32,S140)と、予定通知部(32,S170)と、貢献度算出部(32,S220)と、課金部(32,S230~S240)とを備える。貢献度算出部は、複数の対象車の隊列走行への参加によって得られる利益が反映された利得情報を用いて、隊列走行によって得られる全体の利益に対する複数の対象車の各々の貢献度を求める。課金部は、隊列情報に従った隊列走行の実施が確認されると、貢献度算出部にて算出された貢献度に応じて、複数の対象車の各々が公平な利益が得られるように、複数の対象車の各々に対する課金を決定する。
Description
本国際出願は、2016年5月30日に日本国特許庁に出願された日本国特許出願第2016-107633号に基づく優先権を主張するものであり、日本国特許出願第2016-107633号の全内容を本国際出願に参照により援用する。
本開示は、自動運転機能を備えた複数の車両に隊列走行を行わせる隊列走行システムに関する。
自動運転が可能な車両が車両群を形成して走行する隊列走行が知られている。下記特許文献1には、隊列走行において、隊列の先頭車をサービス提供側、追走車をサービス利用側として、サービス利用側がサービス提供側に対してサービスに対する対価を支払うことで、双方にメリットを分配する技術が提案されている。また、対価を、隊列走行を行った時間や距離、気象条件や路面状況等の運転環境、道路種別や位置等の道路状況に応じて、適切に決定することも提案されている。
しかしながら、発明者の詳細な検討の結果、発明者は、以下の課題を見出した。即ち、隊列走行に参加した車両が得られる利益は、追走車側の運転負荷の軽減だけではなく、燃費の改善効果もある。この燃費の改善効果に着目した場合、先頭車も利益が得られ、その利益は、各車両の特性や隊列の並び順によって決まる。従って、先頭車だけをサービス提供側とみなす手法では、隊列走行への参加者に、利益が公平に分配されていると感じさせることができないという課題や隊列全体の利益を最大化することができないという課題が見出された。また、このような手法では、隊列走行に参加しようとする動機づけをドライバに与えることが困難であるという課題も見出された。
本開示の一つの局面は、隊列全体の利益を最大化し且つ隊列走行に参加した全ての車両に対して公平に利益を分配する技術を提供できることが望ましい。
本開示の一つの局面における隊列走行システムは、抽出部と、順序決定部と、予定通知部と、貢献度算出部と、課金部とを備える。抽出部は、各々が自動運転機能を備えた複数の車両の走行予定を取得し、隊列走行の対象となる複数の対象車を複数の車両から抽出するように構成されている。順序決定部は、抽出部にて抽出された複数の対象車の特性を表す特性情報に基づいて、隊列走行における複数の対象車の並び順を、線形計画法を用いて決定するように構成されている。予定通知部は、抽出部にて抽出された複数の対象車に対して、順序決定部にて決定された並び順を少なくとも含んだ隊列情報を通知するように構成されている。貢献度算出部は、複数の対象車の隊列走行への参加によって得られる利得が反映された利得情報を用いて、隊列走行によって得られる全体の利得に対する複数の対象車の各々の貢献度を求めるように構成されている。課金部は、隊列情報に従った隊列走行の実施が確認されると、貢献度算出部にて算出された貢献度に応じて、複数の対象車の各々が公平な利益が得られるように、複数の対象車の各々に対する課金を決定するように構成されている。
本開示の一つの局面における隊列走行システムは、抽出部と、順序決定部と、予定通知部と、貢献度算出部と、課金部とを備える。抽出部は、各々が自動運転機能を備えた複数の車両の走行予定を取得し、隊列走行の対象となる複数の対象車を複数の車両から抽出するように構成されている。順序決定部は、抽出部にて抽出された複数の対象車の特性を表す特性情報に基づいて、隊列走行における複数の対象車の並び順を、線形計画法を用いて決定するように構成されている。予定通知部は、抽出部にて抽出された複数の対象車に対して、順序決定部にて決定された並び順を少なくとも含んだ隊列情報を通知するように構成されている。貢献度算出部は、複数の対象車の隊列走行への参加によって得られる利得が反映された利得情報を用いて、隊列走行によって得られる全体の利得に対する複数の対象車の各々の貢献度を求めるように構成されている。課金部は、隊列情報に従った隊列走行の実施が確認されると、貢献度算出部にて算出された貢献度に応じて、複数の対象車の各々が公平な利益が得られるように、複数の対象車の各々に対する課金を決定するように構成されている。
このような構成によれば、隊列走行に参加する車両の並び順をどのように設定したとしても、各車両に公平に利得が分配することができる。その結果、隊列走行に参加しようとする動機づけをドライバに与えることができる。また、各車両のドライバに不公平感を与えることなく、全体の利得が最大となるような並び順を設定することができる。
なお、請求の範囲に記載した括弧内の符号は、本開示の一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本開示の技術的範囲を限定するものではない。
以下、図面を参照しながら、本開示を実施するための形態を説明する。
[1.構成]
図1に示すように、隊列走行システム1は、複数の車両10と、配送会社毎に設けられた配送センター20と、各配送会社に共通のサポートセンター30とを備える。なお、隊列に参加する車両はすべて商業配送トラックである。また、各車両は複数の配送会社のいずれかに属している。
[1.構成]
図1に示すように、隊列走行システム1は、複数の車両10と、配送会社毎に設けられた配送センター20と、各配送会社に共通のサポートセンター30とを備える。なお、隊列に参加する車両はすべて商業配送トラックである。また、各車両は複数の配送会社のいずれかに属している。
[1-1.車両]
複数の車両10は、いずれも自動運転機能を有する。り、いずれの車両10も同様の構成を有する。車両10の各々は、外部通信部11、ナビゲーション装置12、車々間通信部13、ヒューマン・マシンインターフェース(HMI)部14、車両制御部15、隊列走行部16を備える。これら各部は、車載ネットワーク17を介して相互に通信可能に接続されている。
複数の車両10は、いずれも自動運転機能を有する。り、いずれの車両10も同様の構成を有する。車両10の各々は、外部通信部11、ナビゲーション装置12、車々間通信部13、ヒューマン・マシンインターフェース(HMI)部14、車両制御部15、隊列走行部16を備える。これら各部は、車載ネットワーク17を介して相互に通信可能に接続されている。
外部通信部11は、自車両が属する配送会社の配送センター20と無線通信を行い、配送に関わる各種情報を送受信する。具体的には、外部通信部11は、配送スケジュールに関する情報である配送情報や、隊列走行に関する情報である隊列情報を配送センター20から受信する。外部通信部11は、隊列情報に従った隊列走行の実施状況を表す開始通知および終了通知等を配送センター20に送信する。外部通信部11は、例えば、携帯電話器、DSRC通信機、ETC車載器等の通信機器を用いて構成してもよい。外部通信部11として用いる通信機器は、上述の通信機器のいずれか一つに限らず、複数種類の通信機器を併用してもよい。
ナビゲーション装置12は、GPS等を用いて自車位置や自車の進行方向(方位)を検出する機能や、設定された目的地までの経路探索・案内の機能等を備える。これらの機能は周知のものである。
車々間通信部13は、他車両との間での通信を行うことにより、隊列走行に必要な各種情報を送受信する。その詳細については後述する。
HMI部16は、LCD等の表示部やタッチパネル等の操作入力部を有する。HMI部16は、隊列走行に関する必要なステータス表示や、隊列走行の開始,終了の報知、隊列内でのコミュニケーション等を行うためのものである。なお、このHMI部16の機能は、ナビゲーション装置12に統合しても良い。
HMI部16は、LCD等の表示部やタッチパネル等の操作入力部を有する。HMI部16は、隊列走行に関する必要なステータス表示や、隊列走行の開始,終了の報知、隊列内でのコミュニケーション等を行うためのものである。なお、このHMI部16の機能は、ナビゲーション装置12に統合しても良い。
車両制御部15は、スロットル開度、操舵角、ブレーキ操作量、ギヤ段等、自車の制御に用いられる制御操作量や、現在位置、速度、加速度、ヨーレート、進行方向等の自車の走行状態を表す走行状態量を検出するように構成されている。車両制御部15は、車々間通信部13を介して自車の制御操作量や走行状態量を、自車の周囲に存在する他車に提供すると共に、他車の制御操作量や走行状態量を取得する。また、車両制御部15は、ナビゲーション装置12に設定される経路情報、隊列走行部16等から与えられる自動運転の目標値(例えば、車間距離,車間時間,車速等)に従い、自動運転を実行するように構成されている。自動運転では、自車および他車の制御操作量や走行状態量に基づいて、エンジン、ブレーキ、ステアリング、トランスミッション等を自動で制御する。
隊列走行部16は、CPU161と、RAM、ROM、フラッシュメモリ等の半導体メモリ(以下、メモリ162)と、を含むマイクロコンピュータを備える。隊列走行部16の各種機能は、CPU161が非遷移的実体的記録媒体に格納されたプログラムを実行することにより実現される。この例では、メモリ162が、プログラムを格納した非遷移的実体的記録媒体に該当する。また、このプログラムの実行により、プログラムに対応する方法が実行される。なお、隊列走行部16は、1つのマイクロコンピュータを備えてもよいし、複数のマイクロコンピュータを備えてもよい。
隊列走行部16は、CPU161がプログラムを実行することで、後述する隊列実行処理を少なくとも実行する。なお、隊列実行処理では、隊列走行に必要な目標値を設定し、この目標値を車両制御部15に提供する。車両制御部15は、提供された目標値に従って自動運転を実行する。その結果、隊列走行が実現される。
[1-2.配送センター]
配送センター20は、配送会社毎に設けられる。配送センター20は、自社に属する車両(以下、自社車両)10との通信を行う車両通信部21と、サポートセンター30との通信を行うセンター通信部22と、自社車両10の配送スケジュール等、自社車両10の管理を行う配車処理部23とを備える。
配送センター20は、配送会社毎に設けられる。配送センター20は、自社に属する車両(以下、自社車両)10との通信を行う車両通信部21と、サポートセンター30との通信を行うセンター通信部22と、自社車両10の配送スケジュール等、自社車両10の管理を行う配車処理部23とを備える。
配車処理部23は、上述の隊列走行部16と同様に、CPUと、メモリと、を含むマイクロコンピュータを備える。メモリには、CPUが実行する処理のプログラムの他、各自社車両10の配送スケジュール、自社車両の燃費を表す燃費情報が少なくとも記憶されている。配送スケジュールには、少なくとも目的地となる配送先、配送先までの走行経路、配送先への到着予定時間が含まれる。更に、配送スケジュールには、走行経路中に高速道路を含む場合、インターチェンジ(以下、IC)の通過予定時間等も含まれる。配車処理部23は、センター通信部22を介した通信によりサポートセンター30から隊列情報の配信を受ける。また、配車処理部23は、車両通信部21を介した通信により、個々の車両10からの要求に応じて、その要求元の車両に関連する配送スケジュールおよび隊列情報を提供する情報提供処理を実行する。
[1-3.サポートセンター]
サポートセンター30は、通信部31と、隊列処理部32とを備える。通信部31は、各社の配送センター20との通信を行う。隊列処理部32は、通信部31を介して取得される情報に基づいて隊列走行の実施に関する各種情報を生成する。隊列処理部32は、上述の隊列走行部16や配車処理部23と同様に、CPUと、メモリと、を含むマイクロコンピュータを備える。隊列処理部32は、通信部31を介して各配送センター20との通信を行うことで、後述する隊列生成処理および課金処理を少なくとも実行する。
サポートセンター30は、通信部31と、隊列処理部32とを備える。通信部31は、各社の配送センター20との通信を行う。隊列処理部32は、通信部31を介して取得される情報に基づいて隊列走行の実施に関する各種情報を生成する。隊列処理部32は、上述の隊列走行部16や配車処理部23と同様に、CPUと、メモリと、を含むマイクロコンピュータを備える。隊列処理部32は、通信部31を介して各配送センター20との通信を行うことで、後述する隊列生成処理および課金処理を少なくとも実行する。
隊列走行部16、配車処理部23、隊列処理部32が実行する各機能を実現する手法はソフトウェアに限るものではない。例えば、その機能の一部又は全部を、論理回路やアナログ回路等を組み合わせたハードウェアを用いて実現してもよい。
[2.処理]
[2-1.隊列情報生成処理]
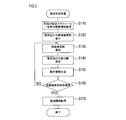
サポートセンター30の隊列処理部32が実行する隊列情報生成処理を、図3のフローチャートを用いて説明する。本処理は、例えば、各配送会社にて翌日の配送スケジュールが決定された後など、予め設定されたタイミングで周期的に起動される。
[2-1.隊列情報生成処理]
サポートセンター30の隊列処理部32が実行する隊列情報生成処理を、図3のフローチャートを用いて説明する。本処理は、例えば、各配送会社にて翌日の配送スケジュールが決定された後など、予め設定されたタイミングで周期的に起動される。
本処理が起動すると、隊列処理部32は、S110にて、通信部31を介して各社の配送センター20から配送スケジュール、およびその配送スケジュールに関わる車両の燃費情報を取得する。
S120では、取得した配送スケジュールを参照し、同じ時間帯に同じ高速道路を走行する複数の車両が存在する場合に、これらの車両を隊列走行の候補車両群として抽出する。
S130では、S120での抽出結果から一つの候補車両群を選択する。
S140では、S130にて選択された候補車両群に含まれる複数の車両について、隊列走行をさせる時の並び順を決定する。この並び順は、隊列全体の燃費改善効果に着目した線形計画法によって決定する。その決定方法の詳細については後述する。
S140では、S130にて選択された候補車両群に含まれる複数の車両について、隊列走行をさせる時の並び順を決定する。この並び順は、隊列全体の燃費改善効果に着目した線形計画法によって決定する。その決定方法の詳細については後述する。
S150では、隊列情報を生成する。隊列情報には、隊列走行の開始地点および開始予定時刻、隊列走行の終了地点および終了予定時刻、隊列走行の参加車両、隊列走行の並び順等が含まれる。
S160では、S120にて抽出された全ての候補車両群について隊列情報を生成したか否かを判断する。隊列情報が生成されていない候補車両群が存在すればS130に戻って同様の処理を繰り返す。全ての候補車両群について隊列情報が生成されていれば、S170に移行する。
S170では、生成された隊列情報を、各配送センター20に配信する。その後、本処理を終了する。
つまり、サポートセンター30は、図2に示すように、各配送センター20から配送スケジュールおよび燃費情報を取得し、これに基づいて生成された隊列情報を各配送センター20に配信する。隊列情報が配信された各配送センター20は、この隊列情報を記憶する。各配送センター20は、車両10からの要求に応じて、要求元の車両に対して隊列情報を配送スケジュールと共に提供する。
つまり、サポートセンター30は、図2に示すように、各配送センター20から配送スケジュールおよび燃費情報を取得し、これに基づいて生成された隊列情報を各配送センター20に配信する。隊列情報が配信された各配送センター20は、この隊列情報を記憶する。各配送センター20は、車両10からの要求に応じて、要求元の車両に対して隊列情報を配送スケジュールと共に提供する。
[2-2.隊列実行処理]
次に、車両10の隊列走行部16が実行する隊列実行処理を、図5のフローチャートを用いて説明する。なお、本処理は、車両10の各部に電源が投入されると起動する。
次に、車両10の隊列走行部16が実行する隊列実行処理を、図5のフローチャートを用いて説明する。なお、本処理は、車両10の各部に電源が投入されると起動する。
本処理が起動すると隊列走行部16は、S310では、配送センター20から配送スケジュールおよび隊列情報を取得する。
S320では、配送スケジュールに示された経路をナビゲーション装置12に設定する。
S320では、配送スケジュールに示された経路をナビゲーション装置12に設定する。
S330では、自車に関わる隊列情報があるか否かを判断する。自車に関わる隊列情報がなければ、本処理を終了する。自車に関わる隊列情報があればS340に進む。
S340では、隊列情報に基づき、隊列走行を実施する区間等の情報をナビゲーション装置12に設定する。
S340では、隊列情報に基づき、隊列走行を実施する区間等の情報をナビゲーション装置12に設定する。
S350では、ナビゲーション装置12、車々間通信部13、車両制御部15等から得られる情報等に基づいて、隊列走行が開始されたか否かを判断する。隊列走行が開始されていなければ、開始されたと判断されるまで待機する。隊列走行が開始されると、S360に進む。
S360では、車載ネットワーク17を介して、図示しない燃料センサから隊列走行開始時の燃料の残存量である開始時残存量を検出して記憶する。これと共に、隊列走行を開始したことを表す開始通知を、外部通信部11を介して自社の配送センター20に送信する。
S370では、ナビゲーション装置12、車々間通信部13、車両制御部15等から得られる情報等に基づいて、隊列走行が終了したか否かを判断する。隊列走行が終了していなければ、終了したと判断されるまで待機する。隊列走行が終了すると、S380に進む。
S380では、車載ネットワーク17を介して、上述の燃料センサから隊列走行終了時の燃料の残存量である終了時残存量を検出する。更に、検出した終了時残存量とS360にて記憶された開始時残存量との差から隊列走行時の燃料消費量を求める。
S390では、隊列走行を終了したことを表す終了通知およびS380にて算出された燃料消費量を、外部通信部11を介して自社の配送センター20に送信する。その後、本処理を終了する。
つまり、車両10は、図2に示すように、自社の配送センター20から配送スケジュールや隊列情報を取得する。そして、車両10は、取得した隊列情報に基づく隊列走行を開始した時には開始通知を配送センター20に送信する。また、車両10は、隊列走行を終了した時には、燃料消費量および終了通知を配送センター20に送信する。配送センター20は、車両から受信した終了通知および燃料消費量を、サポートセンター30に転送する。
[2-3.課金処理]
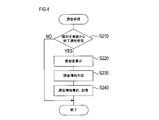
サポートセンター30の隊列処理部32が実行する課金処理を、図4のフローチャートを用いて説明する。なお、本処理は、通信部31を介して終了通知を受信する毎に起動する。
サポートセンター30の隊列処理部32が実行する課金処理を、図4のフローチャートを用いて説明する。なお、本処理は、通信部31を介して終了通知を受信する毎に起動する。
本処理が起動すると、隊列処理部32は、S210にて、終了通知の送信元となった車両と隊列走行をした全ての車両(以下、参加車両)から終了通知を受信しているか否かを判断する。終了通知が未受信の車両があれば、そのまま本処理を一旦終了する。全ての車両から終了通知を受信していれば、S220に進む。
S220では、隊列全体の燃費改善効果に対する各参加車両の貢献度を、シャープレイ値を求めることで算出する。算出には、参加車両に関する燃費情報と隊列走行の走行距離と隊列中の位置によって決まる燃費改善係数とが用いられる。この貢献度の算出方法の詳細については後述する。
S230では、算出された貢献度に応じて各車両に対する課金情報を生成する。この課金情報の生成方法の詳細については後述する。
S240では、算出された課金情報を、配送会社毎に集計,記憶する。その後、本処理を終了する。
S240では、算出された課金情報を、配送会社毎に集計,記憶する。その後、本処理を終了する。
つまり、サポートセンター30は、図2に示すように、終了通知に従って課金情報を生成し、集計する。集計された課金情報を、所定のタイミング(例えば、月1回)で、各配送会社や清算を行う金融機関等に送信する。
[3.動作例]
以下では、S140の処理で実行される隊列走行の並び順の決定方法、およびS220の処理で実行される貢献度の算出方法、S230の処理で実行される課金情報の生成方法について、具体例を用いて説明する。
以下では、S140の処理で実行される隊列走行の並び順の決定方法、およびS220の処理で実行される貢献度の算出方法、S230の処理で実行される課金情報の生成方法について、具体例を用いて説明する。
[3-1.並び順決定]
ここでは、表1に示すように、以下の条件を仮定する。
3台の車両(例えばトラック)A,B,Cがあるインターチェンジ(以下、IC)から同時に高速道路に乗り、目的地に最も近いICまでの予定距離(例えば500km)を隊列走行する。
ここでは、表1に示すように、以下の条件を仮定する。
3台の車両(例えばトラック)A,B,Cがあるインターチェンジ(以下、IC)から同時に高速道路に乗り、目的地に最も近いICまでの予定距離(例えば500km)を隊列走行する。
但し、隊列走行による各車両の燃費改善効果を表す燃費改善係数は、隊列走行における車両間隔および隊列中の位置によって決まる。ここでは、燃費改善係数として、単独で走行する場合の燃費Sから隊列走行した場合の燃費Tとした場合に(S-T)/Sで求められる値を用いる。そして、例えば、車両間隔が4mの場合、燃費改善係数は、先頭車両が0.08、末尾車両が0.15、それ以外の中間車両が0.2となる。この燃費改善係数は、既知の情報として与えられる。また、燃料価格は1リットル当たり100円とする。


[3-2.貢献度算出]
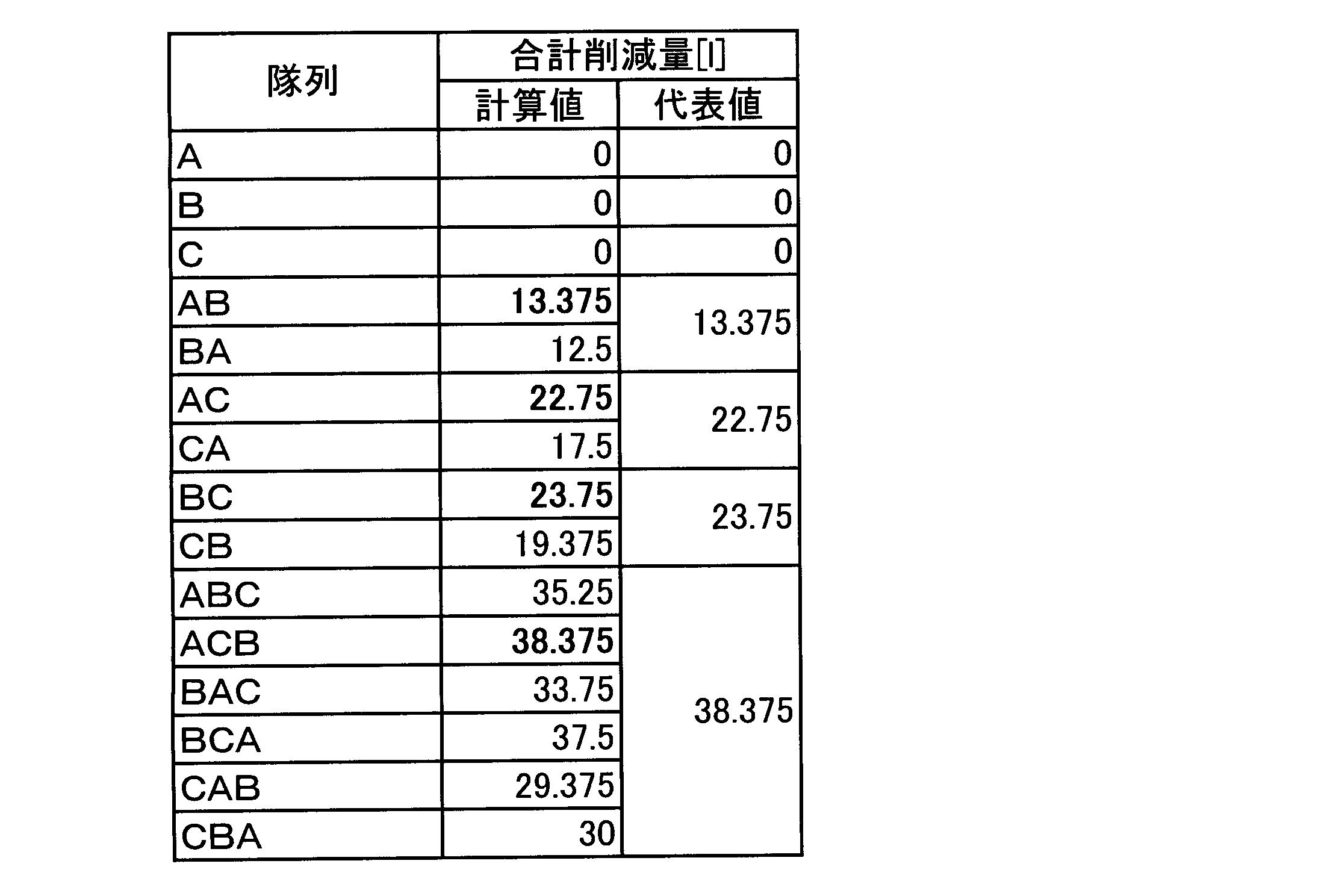
貢献度の算出に当たり、まず、表3に示すように、車両の組み合わせ毎に合計削減量の代表値を設定する。ここで用いる車両の組み合わせとは、並び順が異なるだけで、隊列を構成する車両が同一のものをいう。また、合計削減量の代表値とは、着目する車両組み合わせに属する全ての並び順のパターンの合計削減量のうち最大値となるものをいう。つまり、合計削減量の代表値は、車両A,B,Cのいずれも隊列を構成しなければ0[l]、車両A,Bが隊列を構成すれば13.375[l]、車両A,Cが隊列を構成すれば22.75[l]、車両B,Cが隊列を構成すれば23.75[l]、車両A,B,Cが隊列を構成すれば38.375[l]となる。
貢献度の算出に当たり、まず、表3に示すように、車両の組み合わせ毎に合計削減量の代表値を設定する。ここで用いる車両の組み合わせとは、並び順が異なるだけで、隊列を構成する車両が同一のものをいう。また、合計削減量の代表値とは、着目する車両組み合わせに属する全ての並び順のパターンの合計削減量のうち最大値となるものをいう。つまり、合計削減量の代表値は、車両A,B,Cのいずれも隊列を構成しなければ0[l]、車両A,Bが隊列を構成すれば13.375[l]、車両A,Cが隊列を構成すれば22.75[l]、車両B,Cが隊列を構成すれば23.75[l]、車両A,B,Cが隊列を構成すれば38.375[l]となる。
次に、各車両が、先頭、中間、末尾の順に隊列に加わるものとして、3台で隊列走行する場合の全ての並び順のパターンについて、各車両の貢献度を算出する。各車両の貢献度を算出した結果を表4に示す。

そして、全ての並び順について求めた貢献度に基づき、車両毎に、貢献度の期待値であるシャープレイ値を算出する。このシャープレイ値を、ここでは、各車両の貢献度を表す貢献削減量という。
[3-3.課金]
課金額を算出するにあたり、車両毎の損得量を算出する。具体的には、表5に示すように、先に決定された隊列走行の並び順「車両A,車両C,車両B」に従って、その並び順での各車両の期待削減量を表2から算出する。次に、車両毎に、算出された期待削減量から表4で求めた貢献削減量(即ち、シャープレイ値)を減じることで損得量を算出する。この損得量がプラスの場合は、自車の貢献度と比較して自車が得る利益、即ち、自車の期待削減量が大きいことを示す。逆に損得量がマイナスの場合は、自車の貢献度と比較して自車が得る利益が小さいことを示す。この損得量に、単位当たりの燃料価格を乗じた結果を課金額とする。つまり、プラスであれば支出、マイナスであれば収入となる。
課金額を算出するにあたり、車両毎の損得量を算出する。具体的には、表5に示すように、先に決定された隊列走行の並び順「車両A,車両C,車両B」に従って、その並び順での各車両の期待削減量を表2から算出する。次に、車両毎に、算出された期待削減量から表4で求めた貢献削減量(即ち、シャープレイ値)を減じることで損得量を算出する。この損得量がプラスの場合は、自車の貢献度と比較して自車が得る利益、即ち、自車の期待削減量が大きいことを示す。逆に損得量がマイナスの場合は、自車の貢献度と比較して自車が得る利益が小さいことを示す。この損得量に、単位当たりの燃料価格を乗じた結果を課金額とする。つまり、プラスであれば支出、マイナスであれば収入となる。

以上詳述した本実施形態によれば、以下の効果が得られる。
シャープレイ値に基づき、隊列全体での燃費改善効果に対する各車両の貢献度を求め、期待される燃費改善効果との差分を、各車両または車両が属する配送会社に課金している。このため、隊列走行に参加する車両の並び順をどのように設定したとしても、隊列走行に参加したことによる利益を、各車両に対して公平に分配することができる。その結果、不公平感を与えることなく、全体の利得が最大となるような並び順を設定することができる。更に、配送会社やドライバに対して、隊列走行に参加しようとする動機を与えることができる。
[5.他の実施形態]
以上、本発明を実施するための形態について説明したが、本発明は上述の実施形態に限定されることなく、種々変形して実施することができる。
以上、本発明を実施するための形態について説明したが、本発明は上述の実施形態に限定されることなく、種々変形して実施することができる。
(5a)上記実施形態では、課金情報の生成に、表2から求められる各車両の期待削減量を用いているが、本開示は、これに限定されるものではない。例えば、期待削減量の代わりに、終了通知に示された燃料消費量から算出される実削減量を用いるようにしてもよい。
(5b)上記実施形態では、配送センター20およびサポートセンター30を別々に設けているが、本開示は、これに限定されるものではない。例えば、両センター20,30を統合した機能を有する、各配送会社に共通の配送センターを設けるようにしてもよい。
(5c)上記実施形態では、隊列走行における各車の並び順を決める際に着目する車両特性として燃費を用い、隊列走行に対する各車の貢献度の算出に用いる利得情報として燃料削減量を用いたが、本開示は、これに限定されるものではない。利得情報は、隊列走行に参加した各車両の損得を数値化できる指標であれば何を用いてもよい。
(5d)上記実施形態では、隊列走行に参加する車両をガソリン車としているが、本開示は、これに限定されるものではない。例えば、車両は、ディーゼル車や電気自動車であってもよい。電気自動車の場合、燃費の代わりに電費を用いればよい。
(5e)上記実施形態における1つの構成要素が有する複数の機能を、複数の構成要素によって実現したり、1つの構成要素が有する1つの機能を、複数の構成要素によって実現したりしてもよい。また、複数の構成要素が有する複数の機能を、1つの構成要素によって実現したり、複数の構成要素によって実現される1つの機能を、1つの構成要素によって実現したりしてもよい。また、上記実施形態の構成の一部を省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加又は置換してもよい。なお、請求の範囲に記載の文言から特定される技術思想に含まれるあらゆる態様が本開示の実施形態である。
(5f)本開示は、上述した隊列走行システムの他、当該隊列走行システムを構成する各機能を実現する装置としてコンピュータを機能させるためのプログラム、このプログラムを記録した半導体メモリ等の非遷移的実態的記録媒体、隊列走行の課金方法など、種々の形態で本開示を実現することもできる。
Claims (6)
- 各々が自動運転機能を備えた複数の車両に隊列走行を行わせる隊列走行システム(1)であって、
前記複数の車両の走行予定を取得し、前記隊列走行の対象となる複数の対象車を前記複数の車両から抽出するように構成された抽出部(32,S110~S120)と、
前記抽出部にて抽出された前記複数の対象車の特性を表す特性情報に基づいて、前記隊列走行における前記複数の対象車の並び順を、線形計画法を用いて決定するように構成された順序決定部(32,S140)と、
前記抽出部にて抽出された前記複数の対象車に対して、前記順序決定部にて決定された前記並び順を少なくとも含んだ隊列情報を通知するように構成された予定通知部(32,S170)と、
前記複数の対象車の前記隊列走行への参加によって得られる利益が反映された利得情報を用いて、前記隊列走行によって得られる全体の利益に対する前記複数の対象車の各々の貢献度を求めるように構成された貢献度算出部(32,S220)と、
前記隊列情報に従った前記隊列走行の実施が確認されると、前記貢献度算出部にて算出された貢献度に応じて、前記複数の対象車の各々が公平な利益が得られるように、前記複数の対象車の各々に対する課金を決定するように構成された課金部(32,S230~S240)と、
を備える隊列走行システム。 - 請求項1に記載の隊列走行システムであって、
前記順序決定部は、前記特性情報として前記複数の対象車のそれぞれの燃費を用い、前記複数の対象車のそれぞれの燃費と、隊列中の並び位置毎に予め設定された燃費改善率とに基づいて、前記複数の対象車の全ての燃料削減量の期待値である期待削減量の総和が最大となるように前記並び順を設定するように構成されている、隊列走行システム。 - 請求項2に記載の隊列走行システムであって、
前記貢献度算出部は、前記利得情報として、前記複数の対象車が前記隊列走行に参加することで得られる燃料削減量を用いるように構成されている、隊列走行システム。 - 請求項3に記載の隊列走行システムであって、
前記課金部は、前記貢献度に応じた燃料削減量である貢献削減量と前記期待削減量との差に従って課金額を決定するように構成されている、隊列走行システム。 - 請求項3に記載の隊列走行システムであって、
前記予定通知部が通知した前記隊列情報に従った前記隊列走行が終了すると、前記複数の対象車のそれぞれから、前記隊列走行中に実測された燃料削減量である実削減量を取得するように構成された結果取得部(32:S210)を、更に備え、
前記課金部は、前記貢献度に応じた燃料削減量である貢献削減量と前記実削減量との差に従って課金額を決定するように構成されている、隊列走行システム。 - 請求項1ないし請求項5のいずれか1項に記載の隊列走行システムであって、
前記貢献度算出部は、前記貢献度を表す値としてシャープレイ値を求めるように構成されている、隊列走行システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17806677.5A EP3467738A4 (en) | 2016-05-30 | 2017-05-30 | PLATOON DISPLACEMENT SYSTEM |
| US16/190,891 US11182834B2 (en) | 2016-05-30 | 2018-11-14 | Platoon travel system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-107633 | 2016-05-30 | ||
| JP2016107633A JP6565793B2 (ja) | 2016-05-30 | 2016-05-30 | 隊列走行システム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/190,891 Continuation US11182834B2 (en) | 2016-05-30 | 2018-11-14 | Platoon travel system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017209124A1 true WO2017209124A1 (ja) | 2017-12-07 |
Family
ID=60478608
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/020090 Ceased WO2017209124A1 (ja) | 2016-05-30 | 2017-05-30 | 隊列走行システム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11182834B2 (ja) |
| EP (1) | EP3467738A4 (ja) |
| JP (1) | JP6565793B2 (ja) |
| WO (1) | WO2017209124A1 (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10216195B2 (en) | 2011-07-06 | 2019-02-26 | Peloton Technology, Inc. | Applications for using mass estimations for vehicles |
| US10254764B2 (en) | 2016-05-31 | 2019-04-09 | Peloton Technology, Inc. | Platoon controller state machine |
| US10369998B2 (en) | 2016-08-22 | 2019-08-06 | Peloton Technology, Inc. | Dynamic gap control for automated driving |
| US10474166B2 (en) | 2011-07-06 | 2019-11-12 | Peloton Technology, Inc. | System and method for implementing pre-cognition braking and/or avoiding or mitigation risks among platooning vehicles |
| US10514706B2 (en) | 2011-07-06 | 2019-12-24 | Peloton Technology, Inc. | Gap measurement for vehicle convoying |
| US10520952B1 (en) | 2011-07-06 | 2019-12-31 | Peloton Technology, Inc. | Devices, systems, and methods for transmitting vehicle data |
| US10520581B2 (en) | 2011-07-06 | 2019-12-31 | Peloton Technology, Inc. | Sensor fusion for autonomous or partially autonomous vehicle control |
| US10732645B2 (en) | 2011-07-06 | 2020-08-04 | Peloton Technology, Inc. | Methods and systems for semi-autonomous vehicular convoys |
| US10762791B2 (en) | 2018-10-29 | 2020-09-01 | Peloton Technology, Inc. | Systems and methods for managing communications between vehicles |
| US10899323B2 (en) | 2018-07-08 | 2021-01-26 | Peloton Technology, Inc. | Devices, systems, and methods for vehicle braking |
| US11294396B2 (en) | 2013-03-15 | 2022-04-05 | Peloton Technology, Inc. | System and method for implementing pre-cognition braking and/or avoiding or mitigation risks among platooning vehicles |
| US11334092B2 (en) | 2011-07-06 | 2022-05-17 | Peloton Technology, Inc. | Devices, systems, and methods for transmitting vehicle data |
| US20220244743A1 (en) * | 2021-01-29 | 2022-08-04 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and Methods for Platoon-Leader-as-a-Service |
| US11427196B2 (en) | 2019-04-15 | 2022-08-30 | Peloton Technology, Inc. | Systems and methods for managing tractor-trailers |
| US11709504B2 (en) | 2019-08-09 | 2023-07-25 | Honda Motor Co., Ltd. | Platooning system |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10790945B2 (en) * | 2017-03-23 | 2020-09-29 | Qualcomm Incorporated | Methods to mitigate inter-platoon interference |
| JP6635087B2 (ja) * | 2017-04-19 | 2020-01-22 | トヨタ自動車株式会社 | 運行支援装置および運行支援方法 |
| US11422571B2 (en) * | 2017-12-13 | 2022-08-23 | Ford Global Technologies, Llc | Range-based vehicle platoon ordering |
| KR102485549B1 (ko) * | 2018-06-29 | 2023-01-05 | 현대오토에버 주식회사 | 주행 제어 장치 및 방법 |
| KR102506877B1 (ko) * | 2018-09-03 | 2023-03-08 | 현대자동차주식회사 | 군집 주행 제어 장치, 그를 포함한 시스템 및 그 방법 |
| JP2020052558A (ja) * | 2018-09-25 | 2020-04-02 | 株式会社Subaru | 隊列走行システム |
| JP7216512B2 (ja) * | 2018-09-25 | 2023-02-01 | 株式会社Subaru | 車両マッチングシステム |
| KR102767512B1 (ko) * | 2018-12-14 | 2025-02-18 | 현대자동차주식회사 | 차량, 그와 통신하는 서버 및 그의 제어 방법 |
| KR102725575B1 (ko) * | 2018-12-18 | 2024-11-05 | 현대자동차주식회사 | 무인비행장치를 포함하는 시스템 및 시스템의 협업 방법 |
| JP7244288B2 (ja) * | 2019-02-06 | 2023-03-22 | 三菱重工サーマルシステムズ株式会社 | 並び順決定装置、隊列制御システム、並び順決定方法及びプログラム |
| JP7276430B2 (ja) * | 2019-03-26 | 2023-05-18 | 日本電気株式会社 | 隊列走行管理装置、隊列走行管理方法、プログラム |
| EP3865966B1 (en) * | 2020-02-11 | 2023-11-08 | Volkswagen Aktiengesellschaft | Method, computer program, apparatus, vehicle, and network component for controlling a maneuver within a platoon |
| JP7088252B2 (ja) * | 2020-09-30 | 2022-06-21 | 沖電気工業株式会社 | 分配量算出装置、分配量算出方法およびプログラム |
| US12169775B2 (en) | 2020-10-08 | 2024-12-17 | Toyota Motor Engineering & Manufacturing North America, Inc. | Methods and systems for enhanced scene perception using vehicle platoon |
| JP7682091B2 (ja) * | 2021-12-27 | 2025-05-23 | 株式会社ブロードリーフ | 車両管理装置、車両管理方法、車両管理システム及び車両管理プログラム |
| WO2025254006A1 (ja) * | 2024-06-07 | 2025-12-11 | 日本電気株式会社 | システム、装置、方法及びプログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004094780A (ja) | 2002-09-03 | 2004-03-25 | Denso Corp | 隊列走行システム |
| JP2010146079A (ja) * | 2008-12-16 | 2010-07-01 | Mazda Motor Corp | 車両用運転支援装置 |
| US20130297174A1 (en) * | 2011-10-29 | 2013-11-07 | Alberto Daniel Lacaze | Method and System For Utilizing The Energy Storage Provided By A Vehicle's Mass In The Form Of Potential And Kinetic Energy To Optimize Fuel Consumption |
| JP2014211714A (ja) * | 2013-04-17 | 2014-11-13 | 株式会社デンソー | 隊列走行システム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8352112B2 (en) * | 2009-04-06 | 2013-01-08 | GM Global Technology Operations LLC | Autonomous vehicle management |
| US8744666B2 (en) * | 2011-07-06 | 2014-06-03 | Peloton Technology, Inc. | Systems and methods for semi-autonomous vehicular convoys |
| US9645579B2 (en) * | 2011-07-06 | 2017-05-09 | Peloton Technology, Inc. | Vehicle platooning systems and methods |
| US9182764B1 (en) * | 2014-08-04 | 2015-11-10 | Cummins, Inc. | Apparatus and method for grouping vehicles for cooperative driving |
| US10017179B2 (en) * | 2016-06-06 | 2018-07-10 | GM Global Technology Operations LLC | Method for optimizing inter-vehicle distance and equitably sharing fuel benefits in a vehicle platoon |
| EP3591637A1 (en) * | 2018-07-05 | 2020-01-08 | 2TIL International UG | Method and system for distributing the cost among platooning vehicles based on collected sensor data |
-
2016
- 2016-05-30 JP JP2016107633A patent/JP6565793B2/ja active Active
-
2017
- 2017-05-30 EP EP17806677.5A patent/EP3467738A4/en not_active Ceased
- 2017-05-30 WO PCT/JP2017/020090 patent/WO2017209124A1/ja not_active Ceased
-
2018
- 2018-11-14 US US16/190,891 patent/US11182834B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004094780A (ja) | 2002-09-03 | 2004-03-25 | Denso Corp | 隊列走行システム |
| JP2010146079A (ja) * | 2008-12-16 | 2010-07-01 | Mazda Motor Corp | 車両用運転支援装置 |
| US20130297174A1 (en) * | 2011-10-29 | 2013-11-07 | Alberto Daniel Lacaze | Method and System For Utilizing The Energy Storage Provided By A Vehicle's Mass In The Form Of Potential And Kinetic Energy To Optimize Fuel Consumption |
| JP2014211714A (ja) * | 2013-04-17 | 2014-11-13 | 株式会社デンソー | 隊列走行システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3467738A4 |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11360485B2 (en) | 2011-07-06 | 2022-06-14 | Peloton Technology, Inc. | Gap measurement for vehicle convoying |
| US10216195B2 (en) | 2011-07-06 | 2019-02-26 | Peloton Technology, Inc. | Applications for using mass estimations for vehicles |
| US10520581B2 (en) | 2011-07-06 | 2019-12-31 | Peloton Technology, Inc. | Sensor fusion for autonomous or partially autonomous vehicle control |
| US10520952B1 (en) | 2011-07-06 | 2019-12-31 | Peloton Technology, Inc. | Devices, systems, and methods for transmitting vehicle data |
| US10474166B2 (en) | 2011-07-06 | 2019-11-12 | Peloton Technology, Inc. | System and method for implementing pre-cognition braking and/or avoiding or mitigation risks among platooning vehicles |
| US10514706B2 (en) | 2011-07-06 | 2019-12-24 | Peloton Technology, Inc. | Gap measurement for vehicle convoying |
| US10732645B2 (en) | 2011-07-06 | 2020-08-04 | Peloton Technology, Inc. | Methods and systems for semi-autonomous vehicular convoys |
| US11334092B2 (en) | 2011-07-06 | 2022-05-17 | Peloton Technology, Inc. | Devices, systems, and methods for transmitting vehicle data |
| US10234871B2 (en) | 2011-07-06 | 2019-03-19 | Peloton Technology, Inc. | Distributed safety monitors for automated vehicles |
| US11294396B2 (en) | 2013-03-15 | 2022-04-05 | Peloton Technology, Inc. | System and method for implementing pre-cognition braking and/or avoiding or mitigation risks among platooning vehicles |
| US10254764B2 (en) | 2016-05-31 | 2019-04-09 | Peloton Technology, Inc. | Platoon controller state machine |
| US10921822B2 (en) | 2016-08-22 | 2021-02-16 | Peloton Technology, Inc. | Automated vehicle control system architecture |
| US10369998B2 (en) | 2016-08-22 | 2019-08-06 | Peloton Technology, Inc. | Dynamic gap control for automated driving |
| US10906544B2 (en) | 2016-08-22 | 2021-02-02 | Peloton Technology, Inc. | Dynamic gap control for automated driving |
| US10899323B2 (en) | 2018-07-08 | 2021-01-26 | Peloton Technology, Inc. | Devices, systems, and methods for vehicle braking |
| US11341856B2 (en) | 2018-10-29 | 2022-05-24 | Peloton Technology, Inc. | Systems and methods for managing communications between vehicles |
| US10762791B2 (en) | 2018-10-29 | 2020-09-01 | Peloton Technology, Inc. | Systems and methods for managing communications between vehicles |
| US11427196B2 (en) | 2019-04-15 | 2022-08-30 | Peloton Technology, Inc. | Systems and methods for managing tractor-trailers |
| US11709504B2 (en) | 2019-08-09 | 2023-07-25 | Honda Motor Co., Ltd. | Platooning system |
| US20220244743A1 (en) * | 2021-01-29 | 2022-08-04 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and Methods for Platoon-Leader-as-a-Service |
| US12321179B2 (en) * | 2021-01-29 | 2025-06-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and methods for platoon-leader-as-a-service |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017215681A (ja) | 2017-12-07 |
| US20190080373A1 (en) | 2019-03-14 |
| EP3467738A1 (en) | 2019-04-10 |
| JP6565793B2 (ja) | 2019-08-28 |
| EP3467738A4 (en) | 2019-04-17 |
| US11182834B2 (en) | 2021-11-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6565793B2 (ja) | 隊列走行システム | |
| EP3646304B1 (en) | Method and system for distributing the costs among platooning vehicles based on collected sensor data | |
| CN110678885B (zh) | 用于运力调度的系统和方法 | |
| US20180307247A1 (en) | Operation support apparatus and operation support method | |
| CN114926231A (zh) | 利用费用设定装置、利用费用设定方法、记录介质 | |
| US12321179B2 (en) | System and methods for platoon-leader-as-a-service | |
| CN104732470A (zh) | 拼出租车过程中的费用计算支付方法及其系统 | |
| JP2020087045A (ja) | 対価を伴う優先的な通行を行うための情報処理装置、情報処理装置の制御方法、通信装置、通信装置の制御方法、およびプログラム | |
| CN106296354B (zh) | 一种提高司机与乘客同行率的方法及系统 | |
| CN112776803A (zh) | 控制装置 | |
| Bailo et al. | The Great Divide: What Consumers Are Buying vs. The Investments Automakers & Suppliers Are Making in Future Technologies, Products & Business Models | |
| US20130054311A1 (en) | Systems, methods and computer program products for ride sharing based on mileages | |
| CN119561048A (zh) | 基于v2g的能量调度方法、装置、设备、存储介质及产品 | |
| CN117391772A (zh) | 一种基于双向拍卖的车辆编队激励方法及系统 | |
| Heineke et al. | Reimagining mobility: A CEO’s guide | |
| Dhawan et al. | The auto component industry in India: Preparing for the future | |
| Gubman et al. | Transportation Electrification Policy in California and Germany | |
| US12614464B2 (en) | Vehicle platoon incentive mechanism and system based on double auction | |
| CN117750528B (zh) | 一种基于反向拍卖算法的自动驾驶动态感应优化方法 | |
| Reddy et al. | Disruptive Trends and Inclination in Passenger Car Segment of Future Indian Automobile Industry | |
| Assanis et al. | Automated Vehicle Fuel Efficiency Town Hall | |
| Carley et al. | A Macroeconomic Study of Federal and State Automotive Regulations | |
| Groos et al. | Technology trends and their impact on the German automotive industry | |
| CN108898268B (zh) | 基于订单的顺风车出行节油计量方法 | |
| Schrag | Daniel R. Wohl |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17806677 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2017806677 Country of ref document: EP Effective date: 20190102 |