WO2018142676A1 - インバータ発電機及びその制御方法 - Google Patents
インバータ発電機及びその制御方法 Download PDFInfo
- Publication number
- WO2018142676A1 WO2018142676A1 PCT/JP2017/036983 JP2017036983W WO2018142676A1 WO 2018142676 A1 WO2018142676 A1 WO 2018142676A1 JP 2017036983 W JP2017036983 W JP 2017036983W WO 2018142676 A1 WO2018142676 A1 WO 2018142676A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- power
- value
- inverter
- voltage
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/04—Control effected upon non-electric prime mover and dependent upon electric output value of the generator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of AC power input into DC power output; Conversion of DC power input into AC power output
- H02M7/42—Conversion of DC power input into AC power output without possibility of reversal
- H02M7/44—Conversion of DC power input into AC power output without possibility of reversal by static converters
- H02M7/48—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of DC power input into AC power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P9/00—Arrangements for controlling electric generators for the purpose of obtaining a desired output
- H02P9/10—Control effected upon generator excitation circuit to reduce harmful effects of overloads or transients, e.g. sudden application of load, sudden removal of load, sudden change of load
Definitions
- the present invention relates to an inverter generator and a control method thereof.
- an inverter generator that converts AC power from a power generation unit driven by an engine into DC power by a converter, converts DC power from the converter into AC power by an inverter, and outputs the AC power to a load is known.
- the target rotational speed of the engine is determined according to the output power of the inverter.
- the target engine speed may be determined according to the output current of the inverter.
- Patent Document 1 describes that the target rotational speed of the engine is determined according to the active power consumed by the load.
- the output voltage of the inverter may decrease.
- the engine output speed decreases to the target engine speed as the inverter output voltage decreases, so that the engine cannot be sufficiently accelerated and the engine speed control response may not be sufficient.
- the present invention has been made in view of the above problems, and an object of the present invention is to provide an inverter generator capable of improving the responsiveness of engine rotation speed control when the load fluctuates, and a control method thereof. is there.
- an inverter generator includes an engine, an actuator that adjusts an opening of a throttle valve of the engine, a power generation unit that generates AC power from the power of the engine, and the power generation unit.
- a converter that converts alternating current power that is output into direct current power; an inverter that converts direct current power output from the converter into alternating current power; a current detection unit that detects a current of alternating current power output from the inverter;
- a voltage detection unit that detects the voltage of AC power output from the inverter, a current detection value detected by the current detection unit, a voltage target value of AC power output from the inverter, and the voltage detection unit.
- a target rotation speed for determining a target rotation speed of the engine based on a correction value corresponding to a difference from the detected voltage value Comprising a determining unit, and a actuator control unit for controlling the actuator based on the target rotational speed said determined.
- the inverter generator control method includes an engine, an actuator that adjusts an opening degree of the throttle valve of the engine, a power generation unit that generates AC power from the power of the engine, and the power generation unit.
- a converter that converts alternating current power into direct current power
- an inverter that converts direct current power output from the converter into alternating current power
- a current detection unit that detects a current of alternating current power output from the inverter
- the inverter A voltage detection unit that detects a voltage of the output AC power
- a control method of the inverter generator wherein the current detection value detected by the current detection unit and the voltage of the AC power output from the inverter A correction value corresponding to a difference between a target value and a voltage detection value detected by the voltage detection unit; And determining a target rotational speed, controls the actuator based on the target rotational speed said determined.
- the target rotational speed of the engine is determined using a correction value corresponding to the difference between the voltage target value and the voltage detection value. Therefore, even if the output voltage of the inverter decreases due to load fluctuation, the engine rotational speed control is performed. It is possible to improve responsiveness.
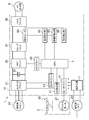
- FIG. 1 is a block diagram illustrating an example of an inverter generator according to an embodiment.
- the inverter generator 1 includes an engine 2.
- the engine 2 is an internal combustion engine that ignites fuel such as gasoline by sparks.
- the engine 2 includes a throttle motor 27 that adjusts the opening of a throttle valve 25 provided in the intake pipe.
- the throttle motor 27 is an example of an actuator, and includes a stepping motor, for example.
- the Engine 2 is connected to power generators 21 and 23.
- the power generators 21 and 23 include a rotor having a permanent magnet that rotates together with the output shaft of the engine 2 and a stator having a winding disposed so as to intersect with the magnetic flux from the permanent magnet.
- the main power generator 21 has three-phase (U, V, W-phase) windings, generates three-phase AC power from the power of the engine 2, and outputs it to the control device 10.
- the sub power generator 23 has a single-phase winding, generates single-phase AC power from the power of the engine 2, and outputs it to the control device 10.
- Single-phase AC power input from the sub power generator 23 to the control device 10 is converted into DC power by the control power supply 7 and supplied to each part in the control device 10.
- the control device 10 includes an SCR / DI bridge 31, a smoothing capacitor 33, an FET bridge 35, a choke coil 37, and a noise filter 39 in this order on the power supply path from the main power generator 21 to the AC output unit 8.
- the SCR / DI bridge 31 is an example of a converter
- the FET bridge 35 is an example of an inverter.
- the SCR / DI bridge 31 converts the three-phase AC power output from the main power generator 21 into DC power.
- the SCR / DI bridge 31 is a three-phase bridge converter that includes three thyristors (SCR) and three diodes (DI).
- SCR thyristors
- DI diodes
- the smoothing capacitor 33 smoothes the DC power output from the SCR / DI bridge 31.
- the FET bridge 35 converts the DC power output from the SCR / DI bridge 31 and smoothed by the smoothing capacitor 33 into AC power.
- the FET bridge 35 is a single-phase bridge inverter including four FETs (field effect transistors), and converts DC power into AC power of a predetermined frequency (for example, 50 or 60 Hz) by controlling conduction of the FET.
- AC power output from the FET bridge 35 is output from the AC output unit 8 to the outside through a choke coil 37 for removing harmonics and a noise filter 39 for removing noise.
- FIG. 2 it is also possible to use a plurality of inverter generators 1A and 1B according to the present embodiment connected in parallel.
- the AC power output from each of the plurality of inverter generators 1A and 1B is combined by the combined AC output unit 80 and output to the outside.
- the control device 10 includes a CPU (Central Processing Unit) 3.
- the CPU 3 controls the throttle motor 27 via the motor driver 41 according to a program stored in a memory (not shown), controls the SCR / DI bridge 31 via the SCR driver 43, and FET bridge via the FET driver 45. 35 is controlled.
- the CPU 3 controls the FET bridge 35 by PWM (Pulse Width Modulation).
- the NE detection unit 51 supplies a detection signal representing the engine rotation speed to the CPU 3.
- the NE detection unit 51 generates a pulse signal from the output of the power generator 21, and the CPU 3 counts the pulse signal to calculate the engine rotation speed.
- the current detector 61 supplies the CPU 3 with a detection signal that is measured by the current sensor 55 and that represents the output current of the AC power output from the FET bridge 35.
- the current sensor 55 is disposed between the choke coil 37 and the noise filter 39, for example.
- the overcurrent detection unit 63 supplies a detection signal indicating the occurrence of overcurrent to the CPU 3.
- the voltage detector 65 supplies the CPU 3 with a detection signal representing the output voltage of the AC power output from the FET bridge 35.
- the voltage detector 65 is connected between the choke coil 37 and the noise filter 39, for example.
- the CPU 3 executes a program stored in a memory (not shown) to thereby determine a target engine speed, and an actuator controller that controls the throttle motor 27 based on the determined target engine speed. Function as. Hereinafter, the operation of the CPU 3 will be described in detail.
- FIG. 3 is a flowchart showing an example of the control method of the inverter generator according to the embodiment.
- the CPU 3 repeatedly executes the engine speed control shown in the figure at a predetermined cycle in accordance with a program stored in a memory (not shown).
- the active power may be calculated by multiplying the AC power output from the FET bridge 35 by the power factor cos ⁇ based on the phase difference ⁇ between the output voltage output from the FET bridge 35 and the output current. .
- the CPU 3 calculates a correction coefficient. Specifically, the CPU 3 determines the target output voltage of the AC power output from the FET bridge 35 (S16), and determines the actual output voltage of the AC power output from the FET bridge 35 via the voltage detection unit 65. Then, the correction coefficient k is calculated by dividing the target output voltage by the actual output voltage (S18).
- the actual output voltage is an effective value for one AC cycle. Specifically, the actual output voltage is a voltage value obtained by integrating and averaging the detected instantaneous output voltage Vac for one AC cycle.
- the correction coefficient k is a value corresponding to the difference between the target output voltage and the actual output voltage. For example, the correction coefficient k increases as the difference between the target output voltage and the actual output voltage increases.
- the correction coefficient k is not limited to the quotient obtained by dividing the target output voltage by the actual output voltage, and may be a difference obtained by subtracting the actual output voltage from the target output voltage.
- the target output voltage is a value close to a rated voltage (for example, 100 V), but is not a fixed value, depending on the active power as described later. Change.
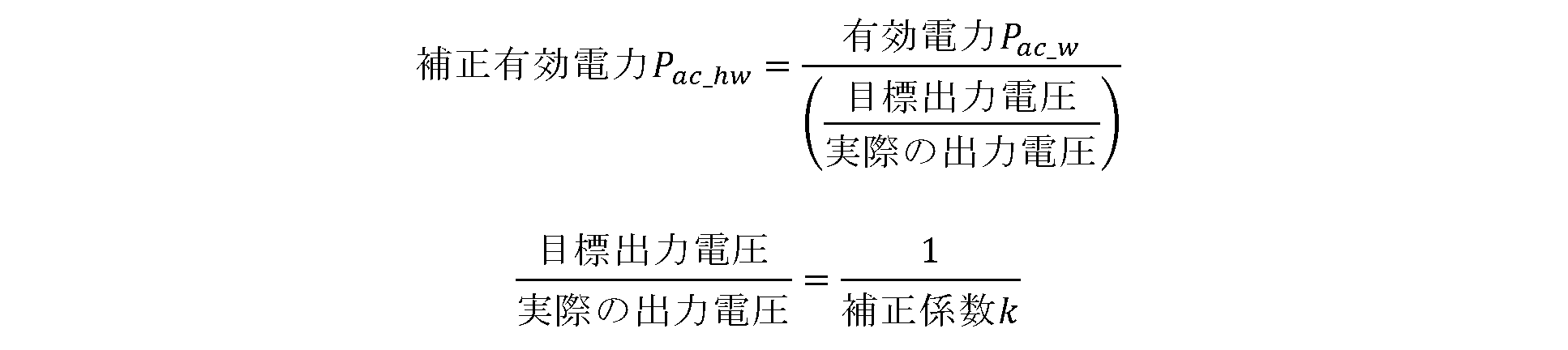
- the CPU 3 calculates the corrected active power based on the active power calculated in S15 and the correction coefficient calculated in 18 above. Specifically, the CPU 3 calculates the corrected effective power Pac_hw by multiplying the effective power Pac_w by the correction coefficient k. For example, the corrected effective power Pac_hw increases as the difference between the target output voltage and the actual output voltage increases.
- the corrected active power Pac_hw is a value obtained by multiplying the active power Pac_w by the correction coefficient k.
- the corrected active power Pac_hw is a ratio of the actual output voltage to the target output voltage (that is, the correction coefficient). It can also be said to be a value divided by the reciprocal of k) (Formula 1 below).
- the CPU 3 determines the target engine speed based on the corrected active power calculated in S19. Specifically, the CPU 3 reads out the target engine rotation speed corresponding to the corrected effective power Pac_hw from a lookup table stored in a memory (not shown).
- FIG. 4 is a diagram illustrating an example of the relationship between the corrected active power and the target engine rotation speed.
- the target engine rotation speed is basically set so as to increase as the correction active power increases.
- the target engine speed is based on the corrected active power, for example, the target engine speed increases as the difference between the target output voltage and the actual output voltage increases.
- the CPU 3 controls the throttle motor 27 based on the target engine speed determined in S20. Specifically, the CPU 3 feedback-controls the throttle motor 27 so as to suppress the difference between the determined target engine speed and the detected actual engine speed.
- the target engine rotation speed is determined based on the corrected active power, so that it is possible to improve the responsiveness of the engine rotation speed control. That is, the corrected active power is corrected so as to increase as the difference between the target output voltage and the actual output voltage increases, and as a result, the target engine speed increases as the difference between the target output voltage and the actual output voltage increases. Therefore, the engine speed can be increased rapidly.
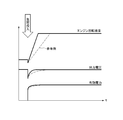
- the figure is a diagram showing an example of changes over time in output voltage, active power, and engine speed.
- the solid line in the figure shows the change over time when the target engine speed is determined based on the corrected active power as an example.
- the broken line in the figure shows, as a reference example, a time change when the target engine speed is determined based on the uncorrected active power.
- the engine 2 Before the load is applied to the AC output unit 8, the engine 2 is in an idle state, and the output voltage of the inverter generator 1 is maintained at the target output voltage.
- the output voltage of the inverter generator 1 instantaneously drops from the target output voltage. For this reason, the active power does not immediately rise to a sufficient level.
- a relatively low target engine speed is set according to the active power that has not reached a sufficient level, it takes time to increase the engine speed.
- the target engine speed is determined based on the corrected active power that is corrected so as to increase as the difference between the target output voltage and the actual output voltage increases.
- the rotation speed is set. For this reason, it is possible to raise an engine speed rapidly.
- FIG. 5 illustrates the case when the load is applied, it is possible to improve the responsiveness of the engine rotational speed control not only when the load is applied but also when other load changes.
- the present embodiment is not limited to a mode in which the target engine rotation speed is determined based on the active power, but a mode in which the target engine rotation speed is determined based on the output current determines the target engine rotation speed based on the apparent power. It is applicable also to an aspect. That is, after correcting the output current or apparent power to increase as the difference between the target output voltage and the actual output voltage increases, the target engine speed is determined based on the corrected output current or apparent power. Also good.
- This embodiment is particularly effective when an inductive load is connected in a mode in which the target engine speed is determined based on the active power. That is, since the active power (power consumed by the load) is small when the inductive load is connected, a relatively low target engine speed is set in the mode using the active power, compared with the mode using the output current or the apparent power. Therefore, the responsiveness of the engine speed control tends to be low. Therefore, after correcting the active power so that it increases as the difference between the target output voltage and the actual output voltage increases, the target power is determined by determining the target engine speed based on the corrected active power. Even if it is an aspect to be used, it is possible to improve the responsiveness of engine speed control.
- the method of correcting the active power using the correction value is not particularly limited as long as the target engine speed increases as the difference between the target output voltage and the actual output voltage finally increases. Further, after the target engine speed is determined based on the active power, the target engine speed may be corrected using the correction value.
- FIG. 6 is a diagram showing an example of the relationship between the active power and the target output voltage.
- the target output voltage is a value close to a rated voltage (for example, 100 V), and changes according to the active power. Specifically, the target output voltage changes linearly so that it gradually decreases as the active power increases.
- the active power is calculated based on the detected output voltage and output current, and the correction coefficient is calculated using the target output voltage that changes according to the active power. For this reason, it is possible to set an appropriate target engine speed.
- the output voltage is actually changed but the power is calculated or the correction coefficient is calculated with the output voltage as a fixed value
- an appropriate target engine speed may not be set.
- the voltage value used for the calculation is lower than the actual output voltage, the target engine speed may be below an appropriate level, and sufficient power may not be obtained.
- the magnitude of the correction coefficient is insufficient, and it may take time to increase the engine speed.
- the voltage value used for the calculation is higher than the actual output voltage, the target engine rotational speed exceeds an appropriate level, which may adversely affect fuel consumption and noise.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Eletrric Generators (AREA)
Abstract
Description
Claims (10)
- エンジンと、
前記エンジンのスロットルバルブの開度を調整するアクチュエータと、
前記エンジンの動力から交流電力を発生する発電部と、
前記発電部から出力される交流電力を直流電力に変換するコンバータと、
前記コンバータから出力される直流電力を交流電力に変換するインバータと、
前記インバータから出力される交流電力の電流を検出する電流検出部と、
前記インバータから出力される交流電力の電圧を検出する電圧検出部と、
前記電流検出部によって検出された電流検出値と、前記インバータから出力される交流電力の電圧目標値と前記電圧検出部によって検出された電圧検出値との差に応じた補正値と、に基づいて前記エンジンの目標回転速度を決定する目標回転速度決定部と、
前記決定された目標回転速度に基づいて前記アクチュエータを制御するアクチュエータ制御部と、
を備えるインバータ発電機。 - 前記目標回転速度決定部は、前記電流検出値と前記電圧検出値とから算出される電力値と、前記補正値と、に基づいて前記目標回転速度を決定する、
請求項1に記載のインバータ発電機。 - 前記電力値は、有効電力の電力値である、
請求項2に記載のインバータ発電機。 - 前記目標回転速度は、前記電圧目標値と前記電圧検出値との差が大きくなるほど大きくなる、
請求項1に記載のインバータ発電機。 - 前記目標回転速度決定部は、前記電力値と前記補正値とから算出される補正電力値に基づいて前記目標回転速度を決定する、
請求項2に記載のインバータ発電機。 - 前記補正電力値は、前記電力値を、前記電圧目標値に対する前記電圧検出値の比からなる前記補正値で除した値である、
請求項5に記載のインバータ発電機。 - 前記補正電力値は、前記電圧目標値と前記電圧検出値との差が大きくなるほど大きくなる、
請求項5に記載のインバータ発電機。 - 前記目標回転速度決定部は、前記補正電力値に対応する前記目標回転速度をルックアップテーブルから読み出す、
請求項5に記載のインバータ発電機。 - 前記目標電圧値は、前記電力値に応じて変化する、
請求項3に記載のインバータ発電機。 - エンジンと、
前記エンジンのスロットルバルブの開度を調整するアクチュエータと、
前記エンジンの動力から交流電力を発生する発電部と、
前記発電部から出力される交流電力を直流電力に変換するコンバータと、
前記コンバータから出力される直流電力を交流電力に変換するインバータと、
前記インバータから出力される交流電力の電流を検出する電流検出部と、
前記インバータから出力される交流電力の電圧を検出する電圧検出部と、
を備えるインバータ発電機の制御方法であって、
前記電流検出部によって検出された電流検出値と、前記インバータから出力される交流電力の電圧目標値と前記電圧検出部によって検出された電圧検出値との差に応じた補正値と、に基づいて前記エンジンの目標回転速度を決定し、
前記決定された目標回転速度に基づいて前記アクチュエータを制御する、
インバータ発電機の制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/483,067 US11011998B2 (en) | 2017-02-06 | 2017-10-12 | Inverter power generator and method for controlling same |
| EP17895011.9A EP3579401B1 (en) | 2017-02-06 | 2017-10-12 | Inverter power generator and method for controlling same |
| CA3052550A CA3052550A1 (en) | 2017-02-06 | 2017-10-12 | Inverter power generator and method for controlling same |
| CN201780085727.6A CN110249521B (zh) | 2017-02-06 | 2017-10-12 | 逆变器发电机及其控制方法 |
| AU2017397532A AU2017397532B2 (en) | 2017-02-06 | 2017-10-12 | Inverter power generator and method for controlling same |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017019304A JP6279777B1 (ja) | 2017-02-06 | 2017-02-06 | インバータ発電機及びその制御方法 |
| JP2017-019304 | 2017-02-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018142676A1 true WO2018142676A1 (ja) | 2018-08-09 |
Family
ID=61195686
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/036983 Ceased WO2018142676A1 (ja) | 2017-02-06 | 2017-10-12 | インバータ発電機及びその制御方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11011998B2 (ja) |
| EP (1) | EP3579401B1 (ja) |
| JP (1) | JP6279777B1 (ja) |
| CN (1) | CN110249521B (ja) |
| AU (1) | AU2017397532B2 (ja) |
| CA (1) | CA3052550A1 (ja) |
| WO (1) | WO2018142676A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022180703A1 (ja) * | 2021-02-24 | 2022-09-01 | 本田技研工業株式会社 | 発電機、制御装置及び制御方法 |
| KR102767752B1 (ko) * | 2024-06-05 | 2025-02-14 | 주식회사 대흥기전 | 순시전력 검출을 이용하는 비상발전기시스템의 연료공급량제어장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004040876A (ja) * | 2002-07-01 | 2004-02-05 | Kokusan Denki Co Ltd | 電源装置搭載内燃機関駆動車両の制御装置 |
| JP2010011687A (ja) * | 2008-06-30 | 2010-01-14 | Hitachi Ltd | 電動駆動制御装置、電動車両および過電圧防止方法 |
| JP2012244699A (ja) | 2011-05-17 | 2012-12-10 | Honda Motor Co Ltd | インバータ発電機の制御装置 |
| WO2013088523A1 (ja) * | 2011-12-14 | 2013-06-20 | 三菱電機株式会社 | ハイブリッド車両の発電機制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0518285A (ja) * | 1991-07-05 | 1993-01-26 | Kubota Corp | インバータ式エンジン発電機 |
| JP2758782B2 (ja) * | 1992-05-22 | 1998-05-28 | 三菱電機株式会社 | 電源装置 |
| US6281664B1 (en) * | 1999-01-13 | 2001-08-28 | Honda Giken Kogyo Kabushiki Kaisha | Generator and generator apparatus |
| JP2005057900A (ja) * | 2003-08-05 | 2005-03-03 | Kokusan Denki Co Ltd | エンジン駆動インバータ発電装置 |
| JP2005137149A (ja) * | 2003-10-31 | 2005-05-26 | Mitsubishi Heavy Ind Ltd | パワーコンディショナ及び発電システム |
| JPWO2008026269A1 (ja) * | 2006-08-31 | 2010-01-14 | 三菱電機株式会社 | 電力変換装置 |
| JP2009071898A (ja) * | 2007-09-10 | 2009-04-02 | Toyota Motor Corp | 蓄電機構の充電制御システムおよびその制御方法 |
| JP2010031660A (ja) * | 2008-07-25 | 2010-02-12 | Honda Motor Co Ltd | インバータ発電機 |
| JP5130142B2 (ja) * | 2008-07-25 | 2013-01-30 | 本田技研工業株式会社 | インバータ発電機 |
| JP5130143B2 (ja) | 2008-07-25 | 2013-01-30 | 本田技研工業株式会社 | インバータ発電機 |
| JP5497316B2 (ja) * | 2009-03-27 | 2014-05-21 | ヤマハモーターパワープロダクツ株式会社 | インバータ式発電機 |
-
2017
- 2017-02-06 JP JP2017019304A patent/JP6279777B1/ja active Active
- 2017-10-12 WO PCT/JP2017/036983 patent/WO2018142676A1/ja not_active Ceased
- 2017-10-12 AU AU2017397532A patent/AU2017397532B2/en not_active Ceased
- 2017-10-12 EP EP17895011.9A patent/EP3579401B1/en active Active
- 2017-10-12 CA CA3052550A patent/CA3052550A1/en active Pending
- 2017-10-12 CN CN201780085727.6A patent/CN110249521B/zh active Active
- 2017-10-12 US US16/483,067 patent/US11011998B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004040876A (ja) * | 2002-07-01 | 2004-02-05 | Kokusan Denki Co Ltd | 電源装置搭載内燃機関駆動車両の制御装置 |
| JP2010011687A (ja) * | 2008-06-30 | 2010-01-14 | Hitachi Ltd | 電動駆動制御装置、電動車両および過電圧防止方法 |
| JP2012244699A (ja) | 2011-05-17 | 2012-12-10 | Honda Motor Co Ltd | インバータ発電機の制御装置 |
| WO2013088523A1 (ja) * | 2011-12-14 | 2013-06-20 | 三菱電機株式会社 | ハイブリッド車両の発電機制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3579401A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3579401A4 (en) | 2020-11-04 |
| EP3579401A1 (en) | 2019-12-11 |
| CN110249521B (zh) | 2023-01-03 |
| EP3579401B1 (en) | 2022-05-04 |
| JP6279777B1 (ja) | 2018-02-14 |
| JP2018129871A (ja) | 2018-08-16 |
| CA3052550A1 (en) | 2018-08-09 |
| US20200014311A1 (en) | 2020-01-09 |
| US11011998B2 (en) | 2021-05-18 |
| AU2017397532B2 (en) | 2022-02-10 |
| CN110249521A (zh) | 2019-09-17 |
| AU2017397532A1 (en) | 2019-08-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3969623B2 (ja) | エンジン駆動発電装置 | |
| CN101449456B (zh) | 电动机驱动装置以及压缩机驱动装置 | |
| US7965063B2 (en) | Inverter generator | |
| JP3784243B2 (ja) | エンジン駆動発電装置 | |
| JP3540152B2 (ja) | エンジン駆動発電機 | |
| US8102066B2 (en) | Inverter generator | |
| WO2015129590A1 (ja) | 過給機及び船舶 | |
| JP6279777B1 (ja) | インバータ発電機及びその制御方法 | |
| JP6345135B2 (ja) | モータ駆動装置 | |
| US10014813B2 (en) | Methods for switching on and for switching off an N-phase electric machine in a motor vehicle | |
| JP2004040987A (ja) | ガスタービン発電システム及びその制御方法 | |
| CN1333520C (zh) | 在高转速范围内减少功率波动的永磁激励的同步电机的调节方法和装置 | |
| JP7229127B2 (ja) | 風力発電装置 | |
| CN101312333B (zh) | 电力变换装置 | |
| CN109247057B (zh) | 用于关断机动车中的多相电机的方法 | |
| JP4180983B2 (ja) | 車両用回転電機の制御装置 | |
| CN111434025B (zh) | 用于确定机动车辆中电机的转子角的方法 | |
| JPH0799800A (ja) | インバータ駆動空気調和機 | |
| JP4802428B2 (ja) | 誘導電動機の制御方法 | |
| JP7529600B2 (ja) | 直流発電システム及び鉄道車両用電力供給システム | |
| JP2018130030A (ja) | モータ駆動装置 | |
| JP5510406B2 (ja) | ブラシレスdcモータの制御装置およびそれを用いた送風装置 | |
| JPH05227791A (ja) | インバータの制御装置 | |
| JP2000324898A (ja) | オルタネータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17895011 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 3052550 Country of ref document: CA |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2017397532 Country of ref document: AU Date of ref document: 20171012 Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017895011 Country of ref document: EP |